S-ar putea să vă placă și
- MANUAL TECNICO Y REPARACION C13 330 y 500 P3D32C002 - S - ED - I - 06 - 2007 PDFDocument240 paginiMANUAL TECNICO Y REPARACION C13 330 y 500 P3D32C002 - S - ED - I - 06 - 2007 PDFyessenia alvarez100% (4)
- Desarrollo Formato 7.1 Registro de Activo Fijo-Detalle Del Inventario InicialDocument9 paginiDesarrollo Formato 7.1 Registro de Activo Fijo-Detalle Del Inventario Inicialruth olivera urquizoÎncă nu există evaluări
- Fuentes de Ingreso para Artistas en La Nueva Industria MusicalDocument9 paginiFuentes de Ingreso para Artistas en La Nueva Industria MusicalRoberto HF100% (1)
- 2 Presentación Efecto FotoeléctricoDocument13 pagini2 Presentación Efecto FotoeléctricoharoldbohorquezÎncă nu există evaluări
- Proyecto Electronica FanciscoDocument9 paginiProyecto Electronica FanciscoFrancisco Miguel Velazquez Martinez100% (1)
- Lab 4 C.E. I Conexión Corta y LargaDocument4 paginiLab 4 C.E. I Conexión Corta y LargaYevit AlvarezÎncă nu există evaluări
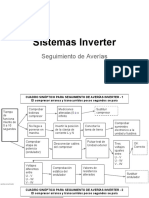
- Sistemas InverterDocument9 paginiSistemas Inverterigor100% (2)
- Catalogo HoneywellDocument145 paginiCatalogo HoneywellMarcelo AngelottiÎncă nu există evaluări
- Medidores de GastoDocument17 paginiMedidores de GastoFrancisco Miguel Velazquez MartinezÎncă nu există evaluări
- Informacion de Equipo SEWDocument4 paginiInformacion de Equipo SEWAngelitho XethitoÎncă nu există evaluări
- Dureza BrinellDocument6 paginiDureza BrinellFrancisco Miguel Velazquez MartinezÎncă nu există evaluări
- Proyecto Esfuerzos CombinadosDocument20 paginiProyecto Esfuerzos CombinadosFrancisco Miguel Velazquez MartinezÎncă nu există evaluări
- Elementos MecanicosDocument7 paginiElementos MecanicosFrancisco Miguel Velazquez MartinezÎncă nu există evaluări
- Maquinas y HerramientasDocument29 paginiMaquinas y HerramientasFrancisco Miguel Velazquez MartinezÎncă nu există evaluări
- CavitaciónDocument3 paginiCavitaciónFrancisco Miguel Velazquez MartinezÎncă nu există evaluări
- Conexiones TrifasicasDocument18 paginiConexiones TrifasicasFrancisco Miguel Velazquez MartinezÎncă nu există evaluări
- Practicas Lab Fisica Ii PDFDocument116 paginiPracticas Lab Fisica Ii PDFFrancisco Miguel Velazquez MartinezÎncă nu există evaluări
- Practica 9 MecaDocument2 paginiPractica 9 MecaFrancisco Miguel Velazquez MartinezÎncă nu există evaluări
- Practica 5 Meca 1Document10 paginiPractica 5 Meca 1Francisco Miguel Velazquez MartinezÎncă nu există evaluări
- Diapositivas y Turbinas HidráulicasDocument9 paginiDiapositivas y Turbinas HidráulicasFrancisco Miguel Velazquez MartinezÎncă nu există evaluări
- Dureza BrinellDocument6 paginiDureza BrinellFrancisco Miguel Velazquez MartinezÎncă nu există evaluări
- Practica VenturiDocument8 paginiPractica VenturiFrancisco Miguel Velazquez MartinezÎncă nu există evaluări
- Trabajo de InvestigacionDocument28 paginiTrabajo de InvestigacionFrancisco Miguel Velazquez MartinezÎncă nu există evaluări
- ForjaDocument19 paginiForjaFrancisco Miguel Velazquez MartinezÎncă nu există evaluări
- Poli MerosDocument7 paginiPoli MerosFrancisco Miguel Velazquez MartinezÎncă nu există evaluări
- Practica GalvanizadoDocument2 paginiPractica GalvanizadoFrancisco Miguel Velazquez MartinezÎncă nu există evaluări
- Cuestionario de Computación 1Document10 paginiCuestionario de Computación 1Francisco Miguel Velazquez MartinezÎncă nu există evaluări
- Amplificador Con Transistor BJT: Sin Condensador en El EmisorDocument8 paginiAmplificador Con Transistor BJT: Sin Condensador en El EmisorRoa Revolledo JhonchitoÎncă nu există evaluări
- Protocol OsDocument4 paginiProtocol OsBeni Del Toro GonzalesÎncă nu există evaluări
- Estanca Hermética - PhilipsDocument2 paginiEstanca Hermética - PhilipsBryan C. Olaechea SaavedraÎncă nu există evaluări
- TV DigitalDocument55 paginiTV Digitalfabricioriveraos1983Încă nu există evaluări
- Guía Del Usuario Del Control RemotoDocument7 paginiGuía Del Usuario Del Control RemotoLauraGarciaHernandezÎncă nu există evaluări
- Problema Resuelto No1Document2 paginiProblema Resuelto No1shemonick zambranoÎncă nu există evaluări
- Circuitos Eléctricos 2Document6 paginiCircuitos Eléctricos 2Raúl RochaÎncă nu există evaluări
- Specsheet Pararrayos PDFDocument2 paginiSpecsheet Pararrayos PDFingguedezandresÎncă nu există evaluări
- Tesis Panel Solar-Gobierno Regional-BorradorDocument11 paginiTesis Panel Solar-Gobierno Regional-BorradorJesus Fernández100% (1)
- Dus 8 Manual UsuarioDocument132 paginiDus 8 Manual UsuarioAlan Andrez100% (2)
- Ejercicios Tabla PeriódicaDocument2 paginiEjercicios Tabla Periódicacnxc0% (2)
- Instrumentos de Medición para El Mantenimiento de Equipos ElectricosDocument19 paginiInstrumentos de Medición para El Mantenimiento de Equipos ElectricosCarlomagnoBautistoOrtizÎncă nu există evaluări
- S12.s1 - Maquina CCDocument10 paginiS12.s1 - Maquina CCLuis BaldassariÎncă nu există evaluări
- Manual de Instrucciones Del Llavero Espía de EstuseguridadDocument3 paginiManual de Instrucciones Del Llavero Espía de EstuseguridadJeannine Orta0% (1)
- De Broglie BohrDocument3 paginiDe Broglie BohrxabihdezÎncă nu există evaluări
- Solucionario Principios de Análisis Instrumental - SkoogDocument235 paginiSolucionario Principios de Análisis Instrumental - Skoogtaniamunoz1911Încă nu există evaluări
- Configuraciones Con DiodosDocument8 paginiConfiguraciones Con DiodosJairoLunaÎncă nu există evaluări
- Modulador en AnilloDocument3 paginiModulador en AnilloJaviermov0% (1)
- 5 - Anexo 7 Marcas de Nacionalidad y de Matricula de AeronavesDocument10 pagini5 - Anexo 7 Marcas de Nacionalidad y de Matricula de Aeronavesrc2271Încă nu există evaluări
- Cap 23 y 24 Campo Eléctrico y Ley de GaussDocument57 paginiCap 23 y 24 Campo Eléctrico y Ley de GaussMar100% (1)