S-ar putea să vă placă și
- 06a Math Essentials 2Document22 pagini06a Math Essentials 2Fakazi NgemaÎncă nu există evaluări
- Collaborative Filtering Matrix Factorization Approach: Jeff Howbert Introduction To Machine Learning Winter 2012 #Document30 paginiCollaborative Filtering Matrix Factorization Approach: Jeff Howbert Introduction To Machine Learning Winter 2012 #vikasÎncă nu există evaluări
- JEE (Main + Advanced) 2021 Leader + Enthusiast CourseDocument4 paginiJEE (Main + Advanced) 2021 Leader + Enthusiast Coursenaitikagarwaljee24Încă nu există evaluări
- Introduction Gradient-Based Optimisation Computation DerivativesDocument20 paginiIntroduction Gradient-Based Optimisation Computation DerivativesMiguel ArestaÎncă nu există evaluări
- 10 Ra LCD Mod GRP 1.0 Student Copy 1621924090Document4 pagini10 Ra LCD Mod GRP 1.0 Student Copy 1621924090Rinku Arun JainÎncă nu există evaluări
- Chapter 7Document37 paginiChapter 7Hoang Quoc TrungÎncă nu există evaluări
- A Comparison of SIFT and Harris Conner Features For Correspondence Points MatchingDocument4 paginiA Comparison of SIFT and Harris Conner Features For Correspondence Points Matchingrajali gintingÎncă nu există evaluări
- Lec8 MLEDocument35 paginiLec8 MLEhu jackÎncă nu există evaluări
- Gradient Descent Deep Learning: by T.K. Damodharan Vice President, RBS Reg - No: PC2013003013008Document37 paginiGradient Descent Deep Learning: by T.K. Damodharan Vice President, RBS Reg - No: PC2013003013008Shanmuganathan V (RC2113003011029)Încă nu există evaluări
- Lecture 12Document38 paginiLecture 12Võ Minh TríÎncă nu există evaluări
- DNN - M2 - Deep Feedforward NN 23decDocument97 paginiDNN - M2 - Deep Feedforward NN 23decManju Prasad NÎncă nu există evaluări
- Image Fusion Using Various Transforms: IPASJ International Journal of Computer Science (IIJCS)Document8 paginiImage Fusion Using Various Transforms: IPASJ International Journal of Computer Science (IIJCS)International Journal of Application or Innovation in Engineering & ManagementÎncă nu există evaluări
- Stochastic Gradient Descent-Ascent: Unified Theory and New Efficient MethodsDocument63 paginiStochastic Gradient Descent-Ascent: Unified Theory and New Efficient MethodsWilder Gonzalez DiazÎncă nu există evaluări
- Concepts in Edge DetectionDocument32 paginiConcepts in Edge DetectionPiyush TrivediÎncă nu există evaluări
- Estimating The Shape Parameter of The Exponential-Weibull Distribution Using Bayesian TechniqueDocument11 paginiEstimating The Shape Parameter of The Exponential-Weibull Distribution Using Bayesian TechniqueProf. Madya Dr. Umar Yusuf MadakiÎncă nu există evaluări
- Lecture II - NormaldsitDocument43 paginiLecture II - Normaldsitmanuelmbiawa30Încă nu există evaluări
- Axioms Convexity Monotonicity and Continuity PDFDocument68 paginiAxioms Convexity Monotonicity and Continuity PDFMohsin ShabbirÎncă nu există evaluări
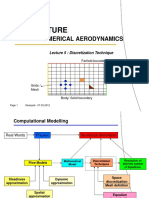
- AE 4012 Aerodinamika Numerik-Lecture5 Discretization TechniqueDocument28 paginiAE 4012 Aerodinamika Numerik-Lecture5 Discretization TechniqueDaniel TanÎncă nu există evaluări
- Linear Discriminant Functions: CS479/679 Pattern Recognition Dr. George BebisDocument41 paginiLinear Discriminant Functions: CS479/679 Pattern Recognition Dr. George BebispiyushÎncă nu există evaluări
- Feature Detection: Jayanta Mukhopadhyay Dept. of Computer Science and EnggDocument54 paginiFeature Detection: Jayanta Mukhopadhyay Dept. of Computer Science and EnggsutanuberaÎncă nu există evaluări
- Euclidean Distance Matrix TrickDocument3 paginiEuclidean Distance Matrix Trickabraham.shz24Încă nu există evaluări
- CS-6777 Liu AbsDocument103 paginiCS-6777 Liu AbsILLA PAVAN KUMAR (PA2013003013042)Încă nu există evaluări
- Comprehensive Survey of Distance Metric Learning TechniquesDocument51 paginiComprehensive Survey of Distance Metric Learning Techniquesmlhnet11Încă nu există evaluări
- Fractional Modeling and Control of Robotic Manipulators with Experimental ValidationDocument35 paginiFractional Modeling and Control of Robotic Manipulators with Experimental ValidationAbhayaÎncă nu există evaluări
- Ebook Calculus 7Th Edition Stewart Solutions Manual Full Chapter PDFDocument54 paginiEbook Calculus 7Th Edition Stewart Solutions Manual Full Chapter PDFvoormalizth9100% (9)
- Probability PDFDocument30 paginiProbability PDFeetahaÎncă nu există evaluări
- Gaussian PDF Properties and Error CharacterizationDocument30 paginiGaussian PDF Properties and Error CharacterizationNizar SaadiÎncă nu există evaluări
- Chapter 5 (PR)Document14 paginiChapter 5 (PR)Shikha AnandÎncă nu există evaluări
- GRP Ra #12Document4 paginiGRP Ra #12Neeraj ParasharÎncă nu există evaluări
- Learning From Data: 4: Bias Variance TradeoffDocument24 paginiLearning From Data: 4: Bias Variance TradeoffHamed AryanfarÎncă nu există evaluări
- TFOS22 FEA Och Optimeringsdriven Design Assignment 5Document3 paginiTFOS22 FEA Och Optimeringsdriven Design Assignment 5Timmy NgoÎncă nu există evaluări
- Lecture 12&13Document89 paginiLecture 12&13QUANG ANH B18DCCN034 PHẠMÎncă nu există evaluări
- Scale Invariant Feature Transform (SIFT) : CS 763 Ajit RajwadeDocument52 paginiScale Invariant Feature Transform (SIFT) : CS 763 Ajit RajwadeashuraÎncă nu există evaluări
- An Introduction To Support Vector Machines: Biplab BanerjeeDocument31 paginiAn Introduction To Support Vector Machines: Biplab BanerjeeAkshat sharmaÎncă nu există evaluări
- Standard Deviation, Standardization and OutliersDocument9 paginiStandard Deviation, Standardization and Outliersaaryamann guptaÎncă nu există evaluări
- Basis Functions for Efficient Serendipity Finite Element MethodsDocument25 paginiBasis Functions for Efficient Serendipity Finite Element MethodsVengÎncă nu există evaluări
- ApplicationDocument12 paginiApplicationEfraim KasinoÎncă nu există evaluări
- IPOL article class v0.5 surveys Gaussian convolution algorithmsDocument25 paginiIPOL article class v0.5 surveys Gaussian convolution algorithmsGroleo MuttÎncă nu există evaluări
- Proba LecturesDocument29 paginiProba Lecturesdoreenoscar9Încă nu există evaluări
- Kernel ClusteringDocument57 paginiKernel ClusteringanggitaÎncă nu există evaluări
- Lecture 13Document4 paginiLecture 13RkÎncă nu există evaluări
- Chapter2 SegmentationDocument37 paginiChapter2 SegmentationasmaaÎncă nu există evaluări
- SEMESTER II CALCULUS ASSIGNMENTDocument5 paginiSEMESTER II CALCULUS ASSIGNMENTMuzzammil ZamriÎncă nu există evaluări
- LP Model in Equation Form: Module - 1 Lecture Notes - 4 Linear Programming Problems-IIDocument3 paginiLP Model in Equation Form: Module - 1 Lecture Notes - 4 Linear Programming Problems-IIraj ranjanÎncă nu există evaluări
- From Vertices To Fragments: Rasterization: Frame BufferDocument22 paginiFrom Vertices To Fragments: Rasterization: Frame BufferPallavi PatilÎncă nu există evaluări
- Cluster Analysis: Basic Concepts and Algorithms: K. Ramachandra MurthyDocument101 paginiCluster Analysis: Basic Concepts and Algorithms: K. Ramachandra MurthyMeida Arek KediriÎncă nu există evaluări
- Quartic Rank Transmuted Gumbel DistributionDocument18 paginiQuartic Rank Transmuted Gumbel Distributiondoaa elhertanyiÎncă nu există evaluări
- Gaussian Filtering 2upDocument8 paginiGaussian Filtering 2upAanÎncă nu există evaluări
- Position Calculation With Least Squares Based On Distance MeasurementsDocument3 paginiPosition Calculation With Least Squares Based On Distance MeasurementsAnthony WellsÎncă nu există evaluări
- 中国计量大学2021 BDocument5 pagini中国计量大学2021 BFARCHASKY 888Încă nu există evaluări
- Exams Part IDocument32 paginiExams Part IjidsjijsdwdÎncă nu există evaluări
- Lecture 02 - Graphical&SimplexIntroDocument120 paginiLecture 02 - Graphical&SimplexIntroSam TripÎncă nu există evaluări
- SIFT TransformDocument50 paginiSIFT Transformk191292 Hassan JamilÎncă nu există evaluări
- Maths Super 500 Questions With SolutionsDocument115 paginiMaths Super 500 Questions With SolutionsAyush SangerÎncă nu există evaluări
- Continuous OptimizationDocument51 paginiContinuous Optimizationlaphv494Încă nu există evaluări
- Week 1. Day 3 (Lesson 3-Subtask 1)Document7 paginiWeek 1. Day 3 (Lesson 3-Subtask 1)Jessalyn LopezÎncă nu există evaluări
- Optimization With COMSOL MultiphysicsDocument55 paginiOptimization With COMSOL MultiphysicsmortezagashtiÎncă nu există evaluări
- Chapter 1Document47 paginiChapter 1qi67egcufÎncă nu există evaluări
- TD1 ImageDocument2 paginiTD1 ImageHassene SeddikÎncă nu există evaluări
- miic-pitch-deckDocument11 paginimiic-pitch-deckAravind KumarÎncă nu există evaluări
- RubriX Deck TemplateDocument10 paginiRubriX Deck TemplateAravind KumarÎncă nu există evaluări
- SOP for audio embedded PresentationsDocument4 paginiSOP for audio embedded PresentationsAravind KumarÎncă nu există evaluări
- Floor plan layout for a 3BHK homeDocument1 paginăFloor plan layout for a 3BHK homeAravind KumarÎncă nu există evaluări
- Transportation EngineeringDocument8 paginiTransportation EngineeringAravind KumarÎncă nu există evaluări
- Test case template for planning and executionDocument2 paginiTest case template for planning and executionAravind KumarÎncă nu există evaluări
- Format for Submitting Business PlanDocument1 paginăFormat for Submitting Business PlanAravind KumarÎncă nu există evaluări
- Vinod Workout-Model PDFDocument1 paginăVinod Workout-Model PDFAravind KumarÎncă nu există evaluări
- Math 4 MLDocument47 paginiMath 4 MLRavi Yellani100% (1)
- Stats HandoutDocument8 paginiStats HandoutManoj Kumar BÎncă nu există evaluări
- BGP MBA 11 - Syllabus - BMKT 2531 - Marketing Research (Craciun)Document13 paginiBGP MBA 11 - Syllabus - BMKT 2531 - Marketing Research (Craciun)diversified1Încă nu există evaluări
- Math 4 MLDocument47 paginiMath 4 MLRavi Yellani100% (1)
- Shadnagar - ModelDocument1 paginăShadnagar - ModelAravind KumarÎncă nu există evaluări
- MDK Final Layout-Model - PDF A 3Document1 paginăMDK Final Layout-Model - PDF A 3Aravind KumarÎncă nu există evaluări
- RepresentativeSyllabi BSBA Marketing MKT400Document4 paginiRepresentativeSyllabi BSBA Marketing MKT400jarameliÎncă nu există evaluări
- Critical ThinkingDocument2 paginiCritical ThinkingAravind KumarÎncă nu există evaluări
- Fluid Mechanics Fundamentals ExplainedDocument29 paginiFluid Mechanics Fundamentals ExplainedIzzah Akimoto AyumuÎncă nu există evaluări
- Reference BooksDocument1 paginăReference BooksAravind KumarÎncă nu există evaluări
- India's History and Culture from 1750-1950Document14 paginiIndia's History and Culture from 1750-1950Aravind KumarÎncă nu există evaluări
- Example of Using Revised TaxonomyDocument18 paginiExample of Using Revised TaxonomyAravind KumarÎncă nu există evaluări
- Installation Guide R19 USDocument25 paginiInstallation Guide R19 USLori LoriÎncă nu există evaluări
- Ghujpjhrd Gy Fiyf Fofk : Bharathidasan UniversityDocument1 paginăGhujpjhrd Gy Fiyf Fofk : Bharathidasan UniversityAravind KumarÎncă nu există evaluări
- 02 Math Essentials FileDocument55 pagini02 Math Essentials FileHemaNathÎncă nu există evaluări
- Cracking The UPSC - The HinduDocument5 paginiCracking The UPSC - The HinduAravind KumarÎncă nu există evaluări
- Example of Using Revised TaxonomyDocument1 paginăExample of Using Revised Taxonomyfred65Încă nu există evaluări
- Civil EngineeringDocument3 paginiCivil EngineeringDhaked Shahab67% (3)
- Problem Set #1 1.050 Solid Mechanics Fall 2002: "Snap Through" of A 2-Bar Linkage: An Introductory ExerciseDocument2 paginiProblem Set #1 1.050 Solid Mechanics Fall 2002: "Snap Through" of A 2-Bar Linkage: An Introductory ExerciseAravind KumarÎncă nu există evaluări
- TSPSC AEE exam pattern and syllabusDocument2 paginiTSPSC AEE exam pattern and syllabusAravind KumarÎncă nu există evaluări
- Full Page Photo1Document1 paginăFull Page Photo1Aravind KumarÎncă nu există evaluări
- Pearson Correlation - SPSS L9Document5 paginiPearson Correlation - SPSS L9Shyam BudhwarÎncă nu există evaluări
- Best Machine Learning Interview Questions and AnswersDocument38 paginiBest Machine Learning Interview Questions and AnswersabhishekÎncă nu există evaluări
- Dynamic Bayesian PanelDocument13 paginiDynamic Bayesian PanelNacÎncă nu există evaluări
- SohilDocument8 paginiSohilSohil AhluWaliaÎncă nu există evaluări
- BSA Quiz 2 Question Paper PDFDocument2 paginiBSA Quiz 2 Question Paper PDFAdit ShahÎncă nu există evaluări
- Regression Analysis Random MotorsDocument19 paginiRegression Analysis Random Motorsravithejahr80% (10)
- MBA 8040 MODEL BUILDING With Data Transformations PDFDocument17 paginiMBA 8040 MODEL BUILDING With Data Transformations PDFAna SaggioÎncă nu există evaluări
- Chapter 02 PDFDocument73 paginiChapter 02 PDFnasim dashkhaneÎncă nu există evaluări
- STPM 2007: Mathematics T (Matematik Lanjutan Paper 2 Kertas 2Document4 paginiSTPM 2007: Mathematics T (Matematik Lanjutan Paper 2 Kertas 2BÎncă nu există evaluări
- Chapter 4 BDocument60 paginiChapter 4 BdsatyanegaraÎncă nu există evaluări
- Quantitative Research and Analysis - Assignment 1 & 2Document7 paginiQuantitative Research and Analysis - Assignment 1 & 2shahidanÎncă nu există evaluări
- Hypothesis TestingDocument59 paginiHypothesis TestingHans Sicangco63% (24)
- ML Model EvaluationDocument17 paginiML Model EvaluationSTYXÎncă nu există evaluări
- Simple Linear RegressionDocument95 paginiSimple Linear RegressionPooja GargÎncă nu există evaluări
- Department of Business Management Course: - Operational Research Individual Assignment 3Document6 paginiDepartment of Business Management Course: - Operational Research Individual Assignment 3tsegayÎncă nu există evaluări
- Hull: Options, Futures, and Other Derivatives, Tenth Edition Chapter 23: Estimating Volatilities and Correlations Multiple Choice Test BankDocument4 paginiHull: Options, Futures, and Other Derivatives, Tenth Edition Chapter 23: Estimating Volatilities and Correlations Multiple Choice Test BankKevin Molly KamrathÎncă nu există evaluări
- Anderson-Darling Normality Test CalculatorDocument6 paginiAnderson-Darling Normality Test Calculatordelmanto88Încă nu există evaluări
- MonthlyReport 202301 XN-10 27724 (L1) #2311 (L1) CL (L2) #2311 (L2) CL (L3) #2311 (L3) CLDocument32 paginiMonthlyReport 202301 XN-10 27724 (L1) #2311 (L1) CL (L2) #2311 (L2) CL (L3) #2311 (L3) CLAbd Erahmen HcnÎncă nu există evaluări
- SampleMidterms PDFDocument15 paginiSampleMidterms PDFpicalaÎncă nu există evaluări
- Forensic Science International - Volume 164 PDFDocument199 paginiForensic Science International - Volume 164 PDFeduardÎncă nu există evaluări
- Model Summary and ANOVADocument1 paginăModel Summary and ANOVADhofirur RamadhanÎncă nu există evaluări
- Stats Chapter 17 Chi SquaredDocument21 paginiStats Chapter 17 Chi SquaredMadison HartfieldÎncă nu există evaluări
- (Anderson) The Asymptotic Distributions of Autoregressive CoefficientsDocument24 pagini(Anderson) The Asymptotic Distributions of Autoregressive CoefficientsDummy VariablesÎncă nu există evaluări
- UT Dallas Syllabus For Psyc6312.001.11f Taught by Nancy Juhn (Njuhn)Document5 paginiUT Dallas Syllabus For Psyc6312.001.11f Taught by Nancy Juhn (Njuhn)UT Dallas Provost's Technology GroupÎncă nu există evaluări
- Six Sigma Green Belt ExaminationDocument6 paginiSix Sigma Green Belt ExaminationNavneet90% (63)
- Forecasting Probs Solns s07Document4 paginiForecasting Probs Solns s07nsrmurthy63Încă nu există evaluări
- Power Point Capítulo 4 MontgomeryDocument47 paginiPower Point Capítulo 4 MontgomeryCereza MendozaÎncă nu există evaluări
- George G. Judge, William E. Griffiths, R. Carter Hill, Helmut Lütkepohl, Tsoung-Chao Lee-The Theory and Practice of Econometrics (Wiley Series in Probability and Statistics) - Wiley (1985)Document1.033 paginiGeorge G. Judge, William E. Griffiths, R. Carter Hill, Helmut Lütkepohl, Tsoung-Chao Lee-The Theory and Practice of Econometrics (Wiley Series in Probability and Statistics) - Wiley (1985)agressive60% (5)
- Bảng phân phối F (f Distribution)Document14 paginiBảng phân phối F (f Distribution)nemo_0909100% (3)
- 6.01-Main Effects and Interaction EffectDocument5 pagini6.01-Main Effects and Interaction EffectYajing XuÎncă nu există evaluări