S-ar putea să vă placă și
- Trabajo - Parte I - SismorresistenciaDocument19 paginiTrabajo - Parte I - SismorresistenciaFelipe MuñozÎncă nu există evaluări
- Capitulo 14 Flexion Compuesta Con Gran Excentricidad 2021Document61 paginiCapitulo 14 Flexion Compuesta Con Gran Excentricidad 2021Jesus Andres EscobarÎncă nu există evaluări
- Vibración Libre AmortiguadaDocument1 paginăVibración Libre AmortiguadaHermannÎncă nu există evaluări
- Perdidad Por Friccion - FluidosDocument15 paginiPerdidad Por Friccion - FluidosMIGUEL ANGEL SUAREZ MONTOYAÎncă nu există evaluări
- Accesorios Red de DistribucionDocument9 paginiAccesorios Red de DistribucionElian Salas100% (1)
- Puentes Semana 3Document22 paginiPuentes Semana 3Lorena Peralta TafurÎncă nu există evaluări
- Ejercicio 9.1 Braja DasDocument2 paginiEjercicio 9.1 Braja DasDiana BeltranÎncă nu există evaluări
- Cimentaciones Superficiales Suelos II 2Document20 paginiCimentaciones Superficiales Suelos II 2Miguel Paredes TorresÎncă nu există evaluări
- Matriz Portico 2 AguasDocument17 paginiMatriz Portico 2 Aguascalobeto987860Încă nu există evaluări
- Proyecto HidrologiaDocument7 paginiProyecto HidrologiaWilliam Francisco NIETO CONTRERASÎncă nu există evaluări
- DISEÑO de UNA VIGA Por Flexion Torsion y CortanteDocument8 paginiDISEÑO de UNA VIGA Por Flexion Torsion y CortanteCarlosRodriguezÎncă nu există evaluări
- Jara Paez Edwin AndresDocument1 paginăJara Paez Edwin AndresJL VegaÎncă nu există evaluări
- Estabilidad de Taludes en Suelos Geot Vial 14 Parte 2Document47 paginiEstabilidad de Taludes en Suelos Geot Vial 14 Parte 2John Paul Farfan ChavezÎncă nu există evaluări
- DinámicaDocument5 paginiDinámicaNICOLAS FRANCISCO SEPULVEDA MELLAÎncă nu există evaluări
- Tarea 3Document1 paginăTarea 3DEYVIS DIAZ MONGEÎncă nu există evaluări
- Exp - Disenoantisismico 2019 2Document2 paginiExp - Disenoantisismico 2019 2Hansc CondoriÎncă nu există evaluări
- Tarea 2Document1 paginăTarea 2Forest SandlyÎncă nu există evaluări
- Repaso de EstáticaDocument15 paginiRepaso de EstáticaZamir Meneses100% (1)
- EjerciciosDocument7 paginiEjerciciosnicanor poloÎncă nu există evaluări
- Actividad 2 - EjerciciosDocument11 paginiActividad 2 - EjerciciosYohana Isabel Carranza VelasquezÎncă nu există evaluări
- Tabla de RigidezDocument1 paginăTabla de RigidezJ ZEGARRAÎncă nu există evaluări
- Taller 1 Suelos 2 0219Document3 paginiTaller 1 Suelos 2 0219Wilson Fabian Madero Galan0% (1)
- Tarea 2 FDC - Ejercicios Del Cap 4 Matriz de Rigidez-1Document17 paginiTarea 2 FDC - Ejercicios Del Cap 4 Matriz de Rigidez-1Jonathan Rodriguez MejiaÎncă nu există evaluări
- Portico EquivalenteDocument10 paginiPortico EquivalenteJeremias Sulca TaipeÎncă nu există evaluări
- Semana 2 Seccion 1 Vigas de Concreto Armado (Actualizado)Document19 paginiSemana 2 Seccion 1 Vigas de Concreto Armado (Actualizado)Giovanni CabanillasÎncă nu există evaluări
- Aplicación de La Ecuación de Energía para El Aforo de CompuertasDocument10 paginiAplicación de La Ecuación de Energía para El Aforo de CompuertasCRISTIAN DAVID CARLOZAMA DIAZÎncă nu există evaluări
- Capitulo 2Document26 paginiCapitulo 2David Acuña YarangaÎncă nu există evaluări
- Práctica N°6 Compuertas (Descarga Libre)Document17 paginiPráctica N°6 Compuertas (Descarga Libre)Mike BenningtonÎncă nu există evaluări
- Ejercicios 4-5 BrajaDocument6 paginiEjercicios 4-5 BrajaWilliam James Cotrina RamirezÎncă nu există evaluări
- 8 JicbDocument1 pagină8 JicbDarkiel Darwin ArriagaÎncă nu există evaluări
- Taller #1 Dinamica EstructuralDocument23 paginiTaller #1 Dinamica EstructuralTony GtzÎncă nu există evaluări
- Chopra 5.1 y 5.2Document5 paginiChopra 5.1 y 5.2KevinPool0% (1)
- Problema 2Document5 paginiProblema 2Lucia GalvanÎncă nu există evaluări
- Triaxial EjerciciossDocument15 paginiTriaxial EjerciciossSantiago Medina OrtizÎncă nu există evaluări
- Clase Practica V Unidad PDFDocument3 paginiClase Practica V Unidad PDFCarmelo AriasÎncă nu există evaluări
- Transposición de Datos de CaudalDocument1 paginăTransposición de Datos de CaudalMiguel AlarconÎncă nu există evaluări
- Teoria de Button y Skempton - Civ 443 - Starling Fortunato VargasDocument4 paginiTeoria de Button y Skempton - Civ 443 - Starling Fortunato VargasStark FortunatoÎncă nu există evaluări
- Corte DirectoDocument15 paginiCorte DirectoAlexander YunguriÎncă nu există evaluări
- Porticos 3D (Porticos Espaciales) PDFDocument32 paginiPorticos 3D (Porticos Espaciales) PDFFernando SpinÎncă nu există evaluări
- Parametros GeotecnicosDocument22 paginiParametros GeotecnicosMedina Julcahuanca CésarÎncă nu există evaluări
- Práctica Tipo CDocument10 paginiPráctica Tipo CRonaldo Paucar MontesÎncă nu există evaluări
- Como Dibujar La Carta de NewmarkDocument3 paginiComo Dibujar La Carta de NewmarkDAVID E PÎncă nu există evaluări
- S04.s05 Diseño Por FlexiónDocument35 paginiS04.s05 Diseño Por FlexiónJose Bances BalderaÎncă nu există evaluări
- Formulas Diseño de AcueductosDocument1 paginăFormulas Diseño de AcueductosRONAL LASSO ALDERETEÎncă nu există evaluări
- Ejercicio 6.16Document5 paginiEjercicio 6.16Esteban Vargas TelloÎncă nu există evaluări
- Ejercicios Propuestos - Clase PrácticaDocument3 paginiEjercicios Propuestos - Clase PrácticaMelanie Goldie Meza GonzalesÎncă nu există evaluări
- 9 Lab Flujo Rapido Variado Resalto HidraulicoDocument11 pagini9 Lab Flujo Rapido Variado Resalto HidraulicoemersonÎncă nu există evaluări
- Metodo de CastiglianoDocument31 paginiMetodo de CastiglianoJavier Jriverosy100% (1)
- Taller 7 - Resistencia Al CorteDocument1 paginăTaller 7 - Resistencia Al CorteJimy MeloÎncă nu există evaluări
- A1 - Exam 1 2020-II Mec Suelos 2 PDFDocument2 paginiA1 - Exam 1 2020-II Mec Suelos 2 PDFJulio Asto FloresÎncă nu există evaluări
- Ejercicio de Triaxiales - ResueltoDocument5 paginiEjercicio de Triaxiales - ResueltoAlan Machaca Arocutipa100% (1)
- Parcial 1 Dinamica Estructural 202010Document2 paginiParcial 1 Dinamica Estructural 202010José Carlos Padilla LoboÎncă nu există evaluări
- Ensayo TriaxialDocument16 paginiEnsayo TriaxialyersinÎncă nu există evaluări
- Topo Levantamiento y ArrastreDocument21 paginiTopo Levantamiento y ArrastreMarcelo ParralesÎncă nu există evaluări
- Carga 1Document1 paginăCarga 1LAZ HERRERA ARIEL HAROLÎncă nu există evaluări
- Vibraciones AmortiguadasDocument31 paginiVibraciones AmortiguadasMaybrid Pecho. AÎncă nu există evaluări
- Informe Dinamica pc8Document15 paginiInforme Dinamica pc8Antony Gregorio AbanÎncă nu există evaluări
- Dinamica Vibraciones LibresDocument11 paginiDinamica Vibraciones LibresJORGE AARON ASÎncă nu există evaluări
- LatexDocument8 paginiLatexKevin KmikzeÎncă nu există evaluări
- Examen de Teoria de MaquinasDocument6 paginiExamen de Teoria de MaquinasartovolastiÎncă nu există evaluări
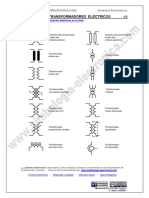
- Transformadores Electricos PDFDocument2 paginiTransformadores Electricos PDFCarlos Uriel Martinez TinocoÎncă nu există evaluări
- La Física en La Ingeniería Industrial (221213Document7 paginiLa Física en La Ingeniería Industrial (221213Ana Catalina GalindoÎncă nu există evaluări
- Trafo Monofasico PDFDocument1 paginăTrafo Monofasico PDFJoao CorvachoÎncă nu există evaluări
- Avance 1 de ProyectoDocument3 paginiAvance 1 de ProyectoOswaldoAmayaBautistaÎncă nu există evaluări
- Práctica VDocument6 paginiPráctica VJesusÎncă nu există evaluări
- Practica 1 - ElasticidadDocument6 paginiPractica 1 - ElasticidadCristian MarinÎncă nu există evaluări
- Es Acs880-37 HW A A4 Variador AbbDocument246 paginiEs Acs880-37 HW A A4 Variador AbbPOLÎncă nu există evaluări
- Examen Preicfes - 041205 PDFDocument10 paginiExamen Preicfes - 041205 PDFGrey RamosÎncă nu există evaluări
- BOQUILLASDocument16 paginiBOQUILLASBelen MarroquinÎncă nu există evaluări
- Electricidad y Magnetismo - ResnickDocument2 paginiElectricidad y Magnetismo - ResnickErick Jair ReyesÎncă nu există evaluări
- Laboratorio 2 Valores Escalares y FasorialesDocument13 paginiLaboratorio 2 Valores Escalares y FasorialesTENORIO AUQUI ANTHONY GERSONÎncă nu există evaluări
- Tema 1.06-Velocidad de Una Onda Longitudinal PDFDocument13 paginiTema 1.06-Velocidad de Una Onda Longitudinal PDFYurani MendozaÎncă nu există evaluări
- Fuerza Elastica Vs ElongacionDocument4 paginiFuerza Elastica Vs ElongacionJhomiraRoñaÎncă nu există evaluări
- Amplificador de InstrumentaciónDocument10 paginiAmplificador de InstrumentaciónNixon CardonaÎncă nu există evaluări
- Mont-Intercom Via Red PDFDocument5 paginiMont-Intercom Via Red PDFLorena GaitanÎncă nu există evaluări
- Laboratorio n2 AiDocument14 paginiLaboratorio n2 AiSebastian JaureguiÎncă nu există evaluări
- Metodo de Las MvasDocument10 paginiMetodo de Las MvasHERNAN ISRAEL VENEGAS TRAVEZÎncă nu există evaluări
- Informe 1 de AutomotrizDocument9 paginiInforme 1 de AutomotrizBrayan Coyuri LopezÎncă nu există evaluări
- LAB. CIRCUITOS I Lab2 Kirchhoff 2-2015 SeptDocument3 paginiLAB. CIRCUITOS I Lab2 Kirchhoff 2-2015 SeptRichard Granados SuarezÎncă nu există evaluări
- Tarea 1Document2 paginiTarea 1Jeff VillaplanaÎncă nu există evaluări
- PON S Transporte Terrestre DiagramasDocument100 paginiPON S Transporte Terrestre DiagramasCarolina PuertaÎncă nu există evaluări
- Marco Teorico DinamicaDocument8 paginiMarco Teorico DinamicaJuanklos PachVega0% (1)
- Ejercicios Leyes de NewtonDocument22 paginiEjercicios Leyes de NewtonMilton100% (1)
- Practica N°2 Chambi Lizarraga Pablo RobertoDocument10 paginiPractica N°2 Chambi Lizarraga Pablo RobertorobertoÎncă nu există evaluări
- Informe MontacargasDocument20 paginiInforme MontacargasEdison Herrera NúñezÎncă nu există evaluări
- Que Es El TorqueDocument6 paginiQue Es El TorqueCatherine CifuentesÎncă nu există evaluări
- Informe TécnicoDocument15 paginiInforme TécnicoEdwinACHÎncă nu există evaluări
- Informe Cny70 FinalDocument7 paginiInforme Cny70 FinalSergio Díaz BarragánÎncă nu există evaluări
- 3 - Propagación de OndasDocument12 pagini3 - Propagación de OndasJuan Pablo Reymundo GonzalesÎncă nu există evaluări