S-ar putea să vă placă și
- Gas Turbine Control System1 NemaDocument50 paginiGas Turbine Control System1 NemaJJ100% (1)
- Gas Turbine ControlDocument81 paginiGas Turbine ControlMubarak Kirkusawi78% (9)
- GT ControlDocument81 paginiGT ControlYazid Rasid100% (3)
- GT FSR ControlDocument15 paginiGT FSR ControlNaveed Irshad50% (2)
- GT Trip ProtectionsDocument2 paginiGT Trip Protectionsakeel_haq100% (7)
- Speedtronic Mark V: Turbine Control SystemDocument67 paginiSpeedtronic Mark V: Turbine Control SystemLarry Smith100% (1)
- GE Frame 9Document4 paginiGE Frame 9Umar Saeed100% (1)
- Startup Shutdown Seq DLNDocument35 paginiStartup Shutdown Seq DLNBozar Tgt91% (11)
- GT Trips List (Generic)Document13 paginiGT Trips List (Generic)Ovais Siddiqui100% (6)
- Check The OLTC Position For Startup Condition On 9 Step Position. Closed 10BBA10GS001, 10BBA10GS010, 10BBA30GS001Document5 paginiCheck The OLTC Position For Startup Condition On 9 Step Position. Closed 10BBA10GS001, 10BBA10GS010, 10BBA30GS001jose Alberto uribe Minier100% (1)
- Mark Vi Training CourseDocument3 paginiMark Vi Training CourseMohammad Abassery75% (4)
- GE Exhaust Temperature ControlDocument3 paginiGE Exhaust Temperature Controlmacrespo100% (5)
- GT LogicsDocument1.232 paginiGT Logicssrinivas100% (3)
- Gas Turbine Lecture (LOGICS)Document8 paginiGas Turbine Lecture (LOGICS)Vikas OzaÎncă nu există evaluări
- MARKVE Getting A Better Understanding of Gas Turbine Control 1 2 3Document92 paginiMARKVE Getting A Better Understanding of Gas Turbine Control 1 2 3nabil160874100% (1)
- Presentation GT Flame Failure (LFCV)Document31 paginiPresentation GT Flame Failure (LFCV)aminullahsharifÎncă nu există evaluări
- GT ControlDocument81 paginiGT ControlGnanaseharan ArunachalamÎncă nu există evaluări
- Control Gas Turbine Power Output in Conjuction With Grid FrequencyDocument32 paginiControl Gas Turbine Power Output in Conjuction With Grid Frequencysmart_eng2009100% (3)
- Gas Turbine Control & Protection: Presentation ONDocument46 paginiGas Turbine Control & Protection: Presentation ONrahulNrana100% (2)
- Combustion Monitor GEK106832Document16 paginiCombustion Monitor GEK106832alaal67% (3)
- Gas Turbine Start SystemDocument108 paginiGas Turbine Start Systemhumane2896% (28)
- On Mark Vi ControlDocument27 paginiOn Mark Vi Controlatreya_baruaa94% (32)
- Fundamentals of Speedtronic CopieDocument21 paginiFundamentals of Speedtronic CopieHassanSaidiÎncă nu există evaluări
- GT 5-8 Alarm Trip ListDocument3 paginiGT 5-8 Alarm Trip Listmuddasirmasood100% (1)
- Gas Turbine Control 4Document67 paginiGas Turbine Control 4Leelananda100% (5)
- Gas Turbin Mark VIDocument42 paginiGas Turbin Mark VIpradeeps2007_1777402100% (3)
- Swirl AngleDocument3 paginiSwirl AngleNIGERE100% (4)
- Learn Gas Turbine by SimulationDocument41 paginiLearn Gas Turbine by SimulationAnonymous 8RRc42G100% (1)
- Ge GT Tag NameDocument9 paginiGe GT Tag NameCris Ronald100% (1)
- Exhaust Temperature SpreadDocument5 paginiExhaust Temperature Spreadchdeepak96100% (6)
- Better Understanding of Gas Turbine ControlDocument117 paginiBetter Understanding of Gas Turbine ControlShahzad James100% (1)
- Exhaust TemperatureDocument53 paginiExhaust TemperatureSahariar Bin Shafique100% (3)
- MOU - Mark VI - ADVANCEDDocument110 paginiMOU - Mark VI - ADVANCEDمحمد أبو لؤي100% (1)
- Mark VIe ClassDocument40 paginiMark VIe ClassRam Krishna100% (10)
- GE SpeedTronics MarkVI Turbine ControlDocument22 paginiGE SpeedTronics MarkVI Turbine ControlBijayananda Nayak100% (3)
- Compressor Bleed Valve FunctionDocument2 paginiCompressor Bleed Valve Functionramakrishna100% (1)
- Gas Turbine Control PhilosophyDocument55 paginiGas Turbine Control Philosophymoosuhaib100% (1)
- Operating SequenceDocument11 paginiOperating Sequencerakeshm31392% (13)
- Mark Vi System ControlsDocument55 paginiMark Vi System ControlsSatya Sreenadh Meesala100% (1)
- Trip Oil SystemDocument6 paginiTrip Oil Systemsmart_eng2009100% (3)
- 9e Operation SequenceDocument32 pagini9e Operation SequenceAhmedAdnanAlSagban100% (4)
- Fact Sheet: GE Energy EX2100e Excitation Control For Gas Turbine GeneratorsDocument2 paginiFact Sheet: GE Energy EX2100e Excitation Control For Gas Turbine Generatorsvcharles100% (1)
- LVDT CalibrationDocument11 paginiLVDT CalibrationChaaaacheeee100% (3)
- I.G.V Openning and Closing CurveDocument3 paginiI.G.V Openning and Closing CurveHussam Baiee100% (3)
- FS-8700-14 GE Mark IV SpeedtronicDocument13 paginiFS-8700-14 GE Mark IV SpeedtronicEric DunnÎncă nu există evaluări
- Mark VIDocument18 paginiMark VIAhmed Eldosoky100% (1)
- Gas TurbineDocument122 paginiGas Turbinechetana100% (1)
- GTDocument122 paginiGTAnand Patel100% (1)
- Gas Turbine Control System1 - NemaDocument50 paginiGas Turbine Control System1 - Nemaveerclaire100% (1)
- Installation AND User Manual: C-Dot NseDocument36 paginiInstallation AND User Manual: C-Dot NseRagini KumariÎncă nu există evaluări
- I-Monitor Motor Controller Manual Rev 7 6Document72 paginiI-Monitor Motor Controller Manual Rev 7 6elch310scridbÎncă nu există evaluări
- Temperature Sensed Motor ControlDocument10 paginiTemperature Sensed Motor ControlminteÎncă nu există evaluări
- GenconDocument5 paginiGenconBruno MarianoÎncă nu există evaluări
- PC210LC-11 Sen06695-01 Control SystemDocument37 paginiPC210LC-11 Sen06695-01 Control Systemdatphuong100% (1)
- PLC ProgrammingDocument57 paginiPLC ProgrammingShaarib KhanÎncă nu există evaluări
- Multiple Device Control With RemoteDocument6 paginiMultiple Device Control With RemoteAnkit KarnawatÎncă nu există evaluări
- KeypadDocument49 paginiKeypadShravan JadhavÎncă nu există evaluări
- PRiCO User Manual 03 04 2009Document16 paginiPRiCO User Manual 03 04 2009Mala BarnaÎncă nu există evaluări
- MICROCONTROLLER-based DC Motor Speed ControllerDocument8 paginiMICROCONTROLLER-based DC Motor Speed Controllerranjithsim100% (1)
- Static Excitation System 1Document24 paginiStatic Excitation System 1Gnanaseharan ArunachalamÎncă nu există evaluări
- Ger 3658d Speedtronic Mark V Gas Turbine Control System PDFDocument19 paginiGer 3658d Speedtronic Mark V Gas Turbine Control System PDFyos100% (1)
- Basics in Intrumentation in Mark-VDocument11 paginiBasics in Intrumentation in Mark-VGnanaseharan ArunachalamÎncă nu există evaluări
- Wind Is The Perceptible Natural Movement of The Air, Especially in The Form of A Current of Air Blowing From A Particular DirectionDocument2 paginiWind Is The Perceptible Natural Movement of The Air, Especially in The Form of A Current of Air Blowing From A Particular DirectionGnanaseharan ArunachalamÎncă nu există evaluări
- TransistorDocument30 paginiTransistorGnanaseharan Arunachalam100% (1)
- WIKA Product Catalog - Pressure and Temperature MeasurementDocument188 paginiWIKA Product Catalog - Pressure and Temperature MeasurementRoo Fa100% (1)
- Please Check Whether You Have Got The Right Question Paper.Document1 paginăPlease Check Whether You Have Got The Right Question Paper.Gnanaseharan ArunachalamÎncă nu există evaluări
- HVDC Answer KeyDocument5 paginiHVDC Answer KeyGnanaseharan ArunachalamÎncă nu există evaluări
- Intelligent System For Controlling Fan Using Pir Sensor Powered by Solar PVDocument11 paginiIntelligent System For Controlling Fan Using Pir Sensor Powered by Solar PVGnanaseharan ArunachalamÎncă nu există evaluări
- Chap 5Document15 paginiChap 5sunilkumareceÎncă nu există evaluări
- Redundant and Voting SystemDocument10 paginiRedundant and Voting SystemGnanaseharan ArunachalamÎncă nu există evaluări
- Ge TMRDocument89 paginiGe TMRGnanaseharan ArunachalamÎncă nu există evaluări
- Ge TMRDocument89 paginiGe TMRGnanaseharan ArunachalamÎncă nu există evaluări
- S P AbstractDocument4 paginiS P AbstractGnanaseharan ArunachalamÎncă nu există evaluări
- MC Murray InverterDocument92 paginiMC Murray InverterGnanaseharan Arunachalam100% (5)
- Goods and Services Tax: One Country One Tax One MarketDocument12 paginiGoods and Services Tax: One Country One Tax One MarketGnanaseharan ArunachalamÎncă nu există evaluări
- Voltage Based Solar TrackingDocument3 paginiVoltage Based Solar TrackingGnanaseharan ArunachalamÎncă nu există evaluări
- Voltage and Current Ratings of Inverter SwitchesDocument3 paginiVoltage and Current Ratings of Inverter SwitchesGnanaseharan ArunachalamÎncă nu există evaluări
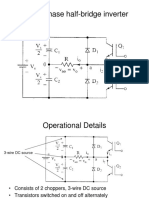
- Single Phase Half Bridge InverterDocument29 paginiSingle Phase Half Bridge InverterGnanaseharan Arunachalam100% (1)
- Inverter and ChopperDocument92 paginiInverter and ChopperGnanaseharan ArunachalamÎncă nu există evaluări
- 10 EE462L H Bridge Inverter BasicsDocument28 pagini10 EE462L H Bridge Inverter BasicsNuno AlvesÎncă nu există evaluări
- Technical Specification of Heavy Duty Industrial MouseDocument1 paginăTechnical Specification of Heavy Duty Industrial MouseGnanaseharan ArunachalamÎncă nu există evaluări
- Understanding Network Architecture: Access Methods How Networks Send Data Ethernet Token Ring Appletalk and ArcnetDocument40 paginiUnderstanding Network Architecture: Access Methods How Networks Send Data Ethernet Token Ring Appletalk and ArcnetGnanaseharan ArunachalamÎncă nu există evaluări
- Unit-I: 1. What Is An Inverter?Document12 paginiUnit-I: 1. What Is An Inverter?Gnanaseharan ArunachalamÎncă nu există evaluări
- Flow and Measurement in Oil and GasDocument17 paginiFlow and Measurement in Oil and GasGnanaseharan ArunachalamÎncă nu există evaluări
- Different Energy Management Techniques in Smart GridDocument4 paginiDifferent Energy Management Techniques in Smart GridGnanaseharan ArunachalamÎncă nu există evaluări
- Network FundamentalDocument89 paginiNetwork FundamentalelshadayÎncă nu există evaluări
- Tc14.0.0.0 ActiveWorkspace6.2.2 READMEDocument5 paginiTc14.0.0.0 ActiveWorkspace6.2.2 READMEgyuregabiÎncă nu există evaluări
- Children and ComputersDocument2 paginiChildren and ComputersluiarboledaÎncă nu există evaluări
- Read MeDocument4 paginiRead MeSticle ArtizanaleÎncă nu există evaluări
- Principle of LCD DisplayDocument23 paginiPrinciple of LCD DisplayZulhilmi BalokolosÎncă nu există evaluări
- X6060520doss-OE OXYTOME 30E HPC HP125-N2W - JOSE SCHOIHET-CL.Document26 paginiX6060520doss-OE OXYTOME 30E HPC HP125-N2W - JOSE SCHOIHET-CL.Juan LopezÎncă nu există evaluări
- Floor Cleaner - SynopsisDocument12 paginiFloor Cleaner - SynopsisTanvi Khurana0% (2)
- Computerized Control Consoles: MCC Classic 50-C8422/CDocument8 paginiComputerized Control Consoles: MCC Classic 50-C8422/CLaura Ximena Rojas NiñoÎncă nu există evaluări
- Cubase 7 Quick Start GuideDocument95 paginiCubase 7 Quick Start Guidenin_rufaÎncă nu există evaluări
- Ran Week 17 2021Document5 paginiRan Week 17 2021Joseph F ChikuseÎncă nu există evaluări
- Chapters 1 - 6: - Chapter 6Document51 paginiChapters 1 - 6: - Chapter 6Delasdriana WiharjaÎncă nu există evaluări
- PLCDocument936 paginiPLCjulio cidÎncă nu există evaluări
- 110PAX4 - Parts (2008)Document7 pagini110PAX4 - Parts (2008)Jonathan LongÎncă nu există evaluări
- UIHCT225-WNNN Owners Installation Operation Service Manual Rev 1.0Document12 paginiUIHCT225-WNNN Owners Installation Operation Service Manual Rev 1.0bchunn2Încă nu există evaluări
- Control RoomDocument24 paginiControl Roomsarsan nedumkuzhi maniÎncă nu există evaluări
- Sencore SA 1454 Manual V1.0Document76 paginiSencore SA 1454 Manual V1.0scribbderÎncă nu există evaluări
- User Manual IDC20KDocument12 paginiUser Manual IDC20KAnonymous m1cSnEavoÎncă nu există evaluări
- CAT S61: The Advanced Tool To Help Get Any Job DoneDocument2 paginiCAT S61: The Advanced Tool To Help Get Any Job DoneDouglas Gaitan PotosmeÎncă nu există evaluări
- Binding Source For DataGridView From Linq To SQL QueryDocument4 paginiBinding Source For DataGridView From Linq To SQL QueryPhuong LeÎncă nu există evaluări
- HW 1 Eeowh 3Document6 paginiHW 1 Eeowh 3정하윤Încă nu există evaluări
- Knowledge Assessment: Fill in The BlankDocument4 paginiKnowledge Assessment: Fill in The BlankElisaÎncă nu există evaluări
- Deep LearningDocument34 paginiDeep Learningtheepi murugesanÎncă nu există evaluări
- Marelli Sra Ecu For Formula Renault 2000Document8 paginiMarelli Sra Ecu For Formula Renault 2000arielfoxtoolsÎncă nu există evaluări
- Generic Classes and Methods: A Deeper Look: Java How To Program, 11/eDocument35 paginiGeneric Classes and Methods: A Deeper Look: Java How To Program, 11/eWilburÎncă nu există evaluări
- Keysight Software ExamplesDocument66 paginiKeysight Software ExamplesAkshaya HegdeÎncă nu există evaluări
- Tools For Creating AnimationDocument6 paginiTools For Creating AnimationSharma RajuÎncă nu există evaluări
- The IT System That Couldn't Deliver SummaryDocument3 paginiThe IT System That Couldn't Deliver SummaryWnsyuhada Ismail100% (1)
- f3 Ict MsDocument3 paginif3 Ict MsAbdifatah SaidÎncă nu există evaluări
- Using IComparer IComparable For Sorting in WPFDocument6 paginiUsing IComparer IComparable For Sorting in WPFAbhiÎncă nu există evaluări
- Unit 1 Real Numbers - Activities 1 (4º ESO)Document3 paginiUnit 1 Real Numbers - Activities 1 (4º ESO)lumaromartinÎncă nu există evaluări
- C++ Practicle FileDocument39 paginiC++ Practicle Filekhushi birlaÎncă nu există evaluări