S-ar putea să vă placă și
- Band Saw (Missing Shop Manual): The Tool Information You Need at Your FingertipsDe la EverandBand Saw (Missing Shop Manual): The Tool Information You Need at Your FingertipsEvaluare: 5 din 5 stele5/5 (1)
- 1 Design of Machine Tool DrivesDocument23 pagini1 Design of Machine Tool DrivesFurkan AhmadÎncă nu există evaluări
- 1 Design of Machine Tool DrivesDocument23 pagini1 Design of Machine Tool DrivesFurkan Ahmad100% (1)
- Kinematics of Machine ToolsDocument28 paginiKinematics of Machine ToolsRohit Kaushik100% (6)
- Ball Traction Drive - FinalDocument46 paginiBall Traction Drive - FinalTejas Shete0% (1)
- Machine Tool Design - MTD Handbook/NotesDocument62 paginiMachine Tool Design - MTD Handbook/NotesOnkar Kakad100% (2)
- MBEYA UNIVERSITY OF SCIENCE AND TECHNOLOGY COLLEGE OF ENGINEERING AND TECHNOLOGY KINEMATICS OF MACHINE TOOLSDocument37 paginiMBEYA UNIVERSITY OF SCIENCE AND TECHNOLOGY COLLEGE OF ENGINEERING AND TECHNOLOGY KINEMATICS OF MACHINE TOOLSSadikiel100% (1)
- Unit 3 CNC Machine Tools: StructureDocument17 paginiUnit 3 CNC Machine Tools: StructureRohit GhulanavarÎncă nu există evaluări
- Regulation of Speed and Feed RatesDocument38 paginiRegulation of Speed and Feed RatesSudipta Paul100% (7)
- Lecture 3 Introduction To Machine Tool Drives and MechanismsDocument59 paginiLecture 3 Introduction To Machine Tool Drives and Mechanismskhalil alhatab100% (1)
- Cam and Follower MechanismDocument44 paginiCam and Follower MechanismAkshay100% (1)
- Design of Modern CNC Machines and Mechatronic ElementsDocument37 paginiDesign of Modern CNC Machines and Mechatronic Elementsnagappa talawarÎncă nu există evaluări
- Machine Tool Design Lab ManualDocument40 paginiMachine Tool Design Lab ManualRohitGupta100% (2)
- 1.1the Concept of Machine Tools (Topic 1.1)Document30 pagini1.1the Concept of Machine Tools (Topic 1.1)Shabani Fadhili100% (1)
- Design of Bed Column and HousingDocument18 paginiDesign of Bed Column and HousingVishnu Prasad100% (2)
- Important Questions MetrologyDocument5 paginiImportant Questions Metrologyswathi_ipe100% (1)
- Module 5 TOOLING and WORK HOLDING DEVICESDocument17 paginiModule 5 TOOLING and WORK HOLDING DEVICESsiddharth100% (1)
- Machine Tool DesignDocument2 paginiMachine Tool DesignBhavesh Pipaliya50% (2)
- Design of Transmission System Question BankDocument18 paginiDesign of Transmission System Question BankAravind50% (2)
- Power SawDocument5 paginiPower SawGodfrey Matii100% (1)
- Design of Transmission System 2 MarksDocument3 paginiDesign of Transmission System 2 MarksMANOJ M100% (1)
- AIP Lab Manual - 012110050524 - 1Document11 paginiAIP Lab Manual - 012110050524 - 1Martin De Boras PragashÎncă nu există evaluări
- CATIA - Lab ManualDocument22 paginiCATIA - Lab Manualarun kumarÎncă nu există evaluări
- Components of NC Systems Classification of NC Machines Consructional DetailsDocument32 paginiComponents of NC Systems Classification of NC Machines Consructional DetailsVaibhav Vithoba NaikÎncă nu există evaluări
- Chapter3 - Cutting Tools For CNC MachinesDocument46 paginiChapter3 - Cutting Tools For CNC MachinesTharun Kumar Chõwdâry100% (1)
- Machine Drawing Two Mark QuestionsDocument13 paginiMachine Drawing Two Mark QuestionsHimanshuSisodiyaÎncă nu există evaluări
- 1.machine Tool Design Assignment 2017Document6 pagini1.machine Tool Design Assignment 2017Charles OndiekiÎncă nu există evaluări
- Exam Paper On Design of Machine ToolsDocument8 paginiExam Paper On Design of Machine ToolsCharles Ondieki100% (1)
- UNIT-1 Locating and Clamping: S.Dharani KumarDocument86 paginiUNIT-1 Locating and Clamping: S.Dharani KumarSaivineeth Gampa100% (1)
- Machine Design Unit 1 Design PhilosophyDocument12 paginiMachine Design Unit 1 Design PhilosophyAnand Babu100% (3)
- General Principles of Machine Tool DesignDocument16 paginiGeneral Principles of Machine Tool DesignChiragJansari100% (1)
- Elementary Transmission For Transforming Rotary Into Translatory MotionDocument14 paginiElementary Transmission For Transforming Rotary Into Translatory Motionshreyas jadhavÎncă nu există evaluări
- Hydraulic Systems of Machine Tools: Components and OperationDocument56 paginiHydraulic Systems of Machine Tools: Components and OperationAli FaycalÎncă nu există evaluări
- Automatic Side Stand For Two WheelerDocument84 paginiAutomatic Side Stand For Two Wheelercoolhari0825% (4)
- CAD-CAM Power Point PresentationDocument102 paginiCAD-CAM Power Point PresentationArgAshishGargÎncă nu există evaluări
- Design of Machine Tools (Me 541) NoteDocument52 paginiDesign of Machine Tools (Me 541) Notejimoh100% (1)
- Gear Finishing MethodDocument9 paginiGear Finishing Methodpatel ketan50% (2)
- 1st Seminar of Sheet Metal Bending MachineDocument22 pagini1st Seminar of Sheet Metal Bending MachineMyo MinÎncă nu există evaluări
- Slide Ways of Machine ToolsDocument42 paginiSlide Ways of Machine ToolsTousif RezaÎncă nu există evaluări
- Abrasive Jet MachiningDocument6 paginiAbrasive Jet Machiningpatel ketan71% (7)
- Strength of Materials Fill in the BlanksDocument3 paginiStrength of Materials Fill in the BlanksAshok Kumar100% (1)
- Design of Slideways For Wear ResistanceDocument25 paginiDesign of Slideways For Wear ResistanceShivam AgarwalÎncă nu există evaluări
- ME83691-Computer Aided Design and ManufacturingDocument15 paginiME83691-Computer Aided Design and Manufacturingraman thiru55Încă nu există evaluări
- Dynamics of Machinery 2 Marks All 5 UnitsDocument14 paginiDynamics of Machinery 2 Marks All 5 UnitsDHINAKARANVEEMAN100% (2)
- Machine Tool Engineering DesignDocument34 paginiMachine Tool Engineering DesignAshok Kumar UppariÎncă nu există evaluări
- 3 - SlidewaysDocument37 pagini3 - SlidewaysRoyÎncă nu există evaluări
- General Procedure in Machine DesignDocument3 paginiGeneral Procedure in Machine Designkingmohit100% (1)
- DYNAMICS LAB VIVA QUESTIONS FullDocument4 paginiDYNAMICS LAB VIVA QUESTIONS FullSudipta NathÎncă nu există evaluări
- Design of Speed and Feed Gear BoxesDocument67 paginiDesign of Speed and Feed Gear BoxesBhotka BhutkiÎncă nu există evaluări
- Group Technology and Cellular Manufacturing LayoutsDocument78 paginiGroup Technology and Cellular Manufacturing Layoutsprof_panneerÎncă nu există evaluări
- CNC Milling ReportDocument6 paginiCNC Milling ReportMuhazman DinÎncă nu există evaluări
- UNIT-3 - Manufacturing Technolgy II-1Document48 paginiUNIT-3 - Manufacturing Technolgy II-1sirajudeen I67% (3)
- MP II - Lecture 3 - Thread and Gear ManufacturingDocument57 paginiMP II - Lecture 3 - Thread and Gear ManufacturingArif Hossain100% (1)
- CAD Lab ManualDocument89 paginiCAD Lab ManualDhamotharan S100% (1)
- Mak4462 Machine Tools: Yildiz Technical University Faculty of Mechanical Engineering Department of Mechanical EngineeringDocument12 paginiMak4462 Machine Tools: Yildiz Technical University Faculty of Mechanical Engineering Department of Mechanical EngineeringALPERENÎncă nu există evaluări
- Kassahun Tadess GeerboxDocument16 paginiKassahun Tadess Geerboxabubekery61Încă nu există evaluări
- Automatic TransmissionDocument20 paginiAutomatic TransmissionAravindSaju100% (3)
- Automatic Transmission BasicsDocument20 paginiAutomatic Transmission BasicsDwy Bagus NÎncă nu există evaluări
- Gear Box Machine DesignDocument28 paginiGear Box Machine DesignPankaj DoshiÎncă nu există evaluări
- Transmission Paper Short QuestionsDocument18 paginiTransmission Paper Short QuestionsAbdurrehman HashmiÎncă nu există evaluări
- Gear CalculationDocument2 paginiGear CalculationkonikomiÎncă nu există evaluări
- Drive ShaftDocument5 paginiDrive ShaftWaladun Soleh IrwanÎncă nu există evaluări
- Ion (Btra) Auto TransmissionDocument1 paginăIon (Btra) Auto TransmissionBruceli CWBÎncă nu există evaluări
- Transmission Diagnostic Trouble Codes F301-F308Document4 paginiTransmission Diagnostic Trouble Codes F301-F308Lupin GonzalezÎncă nu există evaluări
- Case 580 SLPDocument9 paginiCase 580 SLPRbm Info0% (1)
- NMRVDocument114 paginiNMRVNur SugiartoÎncă nu există evaluări
- Module 3 A&CDocument69 paginiModule 3 A&Csuraj7045sarmanÎncă nu există evaluări
- Axes and Motion StructureDocument30 paginiAxes and Motion StructureBhuban LimbuÎncă nu există evaluări
- Al4 Automatic TransmissionDocument56 paginiAl4 Automatic TransmissionDamien Jorgensen100% (2)
- Amarok 2011 8-Speed Automatic Gearbox 0CMDocument69 paginiAmarok 2011 8-Speed Automatic Gearbox 0CMManuel Gonzales0% (1)
- Workshop Practice Series 17 - Gears and Gear CuttingDocument138 paginiWorkshop Practice Series 17 - Gears and Gear CuttingSpyros DagklisÎncă nu există evaluări
- Unit 1 Clutch and Gearbox GuideDocument5 paginiUnit 1 Clutch and Gearbox GuideSathis Kumar67% (12)
- Four-Wheel Drive System: Architecture, Basic Vehicle Dynamics and TractionDocument7 paginiFour-Wheel Drive System: Architecture, Basic Vehicle Dynamics and TractionAhmad setiadiÎncă nu există evaluări
- Captiva 2008Document197 paginiCaptiva 2008yorjan alvarez dorado100% (1)
- Manual TransmissionDocument29 paginiManual TransmissionChuang Ptchuang50% (2)
- GBDocument36 paginiGBSatya Narayan ShuklaÎncă nu există evaluări
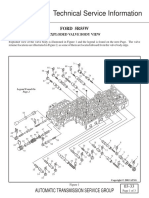
- Technical Service Information: Ford 5R55WDocument3 paginiTechnical Service Information: Ford 5R55WLuis AragonesÎncă nu există evaluări
- Bearing Load CalculationDocument9 paginiBearing Load CalculationwahyoesoemantriÎncă nu există evaluări
- Catalogo Tração CarraroDocument9 paginiCatalogo Tração Carrarotrader troladorÎncă nu există evaluări
- 7-96212 Int A4CDocument304 pagini7-96212 Int A4CZDFAGROPARTSÎncă nu există evaluări
- 06-Automatic Transaxle SystemDocument392 pagini06-Automatic Transaxle Systemsalvador3410% (1)
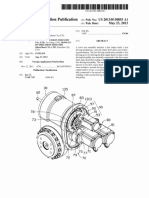
- Patent Application Publication (10) Pub. No.: US 2013/0130855A1Document7 paginiPatent Application Publication (10) Pub. No.: US 2013/0130855A1Billel LouniciÎncă nu există evaluări
- 5R55W-S VacTestGuideDocument2 pagini5R55W-S VacTestGuideaxallindoÎncă nu există evaluări
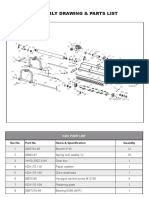
- Assembly Drawing & Parts ListDocument6 paginiAssembly Drawing & Parts ListOskars RozefeldsÎncă nu există evaluări
- Dobreva 2022 IOP Conf. Ser. Mater. Sci. Eng. 1220 012025Document6 paginiDobreva 2022 IOP Conf. Ser. Mater. Sci. Eng. 1220 012025King PipiÎncă nu există evaluări
- ZF As Tronic Schematic EDocument2 paginiZF As Tronic Schematic ESaša Oljača78% (18)
- TransmisionDocument303 paginiTransmisionzaka_czÎncă nu există evaluări
- 5 - Powershift TransmissionDocument72 pagini5 - Powershift TransmissionOscar VazquesÎncă nu există evaluări
- ARDF DF3090 (D779-17) Parts CatalogDocument41 paginiARDF DF3090 (D779-17) Parts CatalogcaratulinÎncă nu există evaluări
- How The Royal Enfield Bullet 4-Speed Gearbox Works: ShaftsDocument4 paginiHow The Royal Enfield Bullet 4-Speed Gearbox Works: ShaftsgkarthikeyanÎncă nu există evaluări