S-ar putea să vă placă și
- Lec 1 - Three Phase Induction Motor PODocument12 paginiLec 1 - Three Phase Induction Motor POLalitÎncă nu există evaluări
- Implementation of Inductive Proximity Sensors in ADocument4 paginiImplementation of Inductive Proximity Sensors in ALalitÎncă nu există evaluări
- Problems, Assumptions and Solutions in Locomotive Design, Traction and Operational StudiesDocument24 paginiProblems, Assumptions and Solutions in Locomotive Design, Traction and Operational StudiesLalitÎncă nu există evaluări
- ( ), FRC - 36 Provisional Fee . - 296 - 1 - Ahd - FRC PDFDocument5 pagini( ), FRC - 36 Provisional Fee . - 296 - 1 - Ahd - FRC PDFLalitÎncă nu există evaluări
- ( ), FRC Provisional Fee . - 298 - 1 - Baroda - FRCDocument3 pagini( ), FRC Provisional Fee . - 298 - 1 - Baroda - FRCLalitÎncă nu există evaluări
- Control Methods and Applications of Induction Motor DriveDocument6 paginiControl Methods and Applications of Induction Motor DriveLalitÎncă nu există evaluări
- Income Tax Calculator FY 2020 2021Document8 paginiIncome Tax Calculator FY 2020 2021LalitÎncă nu există evaluări
- Operations Research P Rama Murthy PDFDocument716 paginiOperations Research P Rama Murthy PDFPaban Raj LohaniÎncă nu există evaluări
- IJARIIE-ISSN(O)-2395-4396 Vol-4 Issue-2 2018 Mathematical Modelling Wind Farm HybridDocument8 paginiIJARIIE-ISSN(O)-2395-4396 Vol-4 Issue-2 2018 Mathematical Modelling Wind Farm HybridLalitÎncă nu există evaluări
- Photovoltaic Supplied Grid-Connected Modular Multilevel Converter with Active and Reactive Power ControlDocument6 paginiPhotovoltaic Supplied Grid-Connected Modular Multilevel Converter with Active and Reactive Power ControlLalitÎncă nu există evaluări
- Different Fast Charging Methods and Topologies For EV ChargingDocument5 paginiDifferent Fast Charging Methods and Topologies For EV ChargingKrishnakant DeshmukhÎncă nu există evaluări
- Jalgaon CdapDocument154 paginiJalgaon CdapLalitÎncă nu există evaluări
- Simulation of Quasi Cascaded H-Bridge Five-Level Boost InverterDocument10 paginiSimulation of Quasi Cascaded H-Bridge Five-Level Boost InverterLalitÎncă nu există evaluări
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5784)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (119)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Drone Manual PDFDocument15 paginiDrone Manual PDFLisa GÎncă nu există evaluări
- User Guide - BISM2 at Command SetDocument41 paginiUser Guide - BISM2 at Command SetИван ПарлапановÎncă nu există evaluări
- MAX14871 4.5V To 36V Full-Bridge DC Motor Driver: General Description Benefits and FeaturesDocument15 paginiMAX14871 4.5V To 36V Full-Bridge DC Motor Driver: General Description Benefits and FeaturesUdit AgrawalÎncă nu există evaluări
- AXIS C1004-E BlackDocument2 paginiAXIS C1004-E Blacktrung nguyenÎncă nu există evaluări
- Is3110 Lab 1 How To Identify Threats Vulnerabilities in An It InfrastructureDocument7 paginiIs3110 Lab 1 How To Identify Threats Vulnerabilities in An It InfrastructuressssssssssÎncă nu există evaluări
- J-K Flip FlopDocument5 paginiJ-K Flip FlopNagham Hikmat AzizÎncă nu există evaluări
- Samsung SCM ExpressDocument6 paginiSamsung SCM ExpressBurak DereliÎncă nu există evaluări
- GSM KPI Optimization Process and GuideDocument22 paginiGSM KPI Optimization Process and GuideZouhir El AllaouiÎncă nu există evaluări
- What Is High Speed PCB DesignDocument13 paginiWhat Is High Speed PCB DesignjackÎncă nu există evaluări
- 802421-4 LabManual DigitalCommunicationSystems March 6th 2011Document79 pagini802421-4 LabManual DigitalCommunicationSystems March 6th 2011منذر ركهÎncă nu există evaluări
- DCPL 8410 CDWDocument19 paginiDCPL 8410 CDWJavier OlivaresÎncă nu există evaluări
- Peer To PeerDocument6 paginiPeer To PeerScholar 4youÎncă nu există evaluări
- 3GPP - Ts - 124167v160200p - (UMTS - LTE - 5G) - 3GPP IMS Management Object - Stage 3Document71 pagini3GPP - Ts - 124167v160200p - (UMTS - LTE - 5G) - 3GPP IMS Management Object - Stage 3Qing GuoÎncă nu există evaluări
- Interfacing SPI-DAC With Spartan-3an FPGA PDFDocument14 paginiInterfacing SPI-DAC With Spartan-3an FPGA PDFSrinivas CherukuÎncă nu există evaluări
- ITDL Journal LearningDocument2 paginiITDL Journal Learningali umri hasibuanÎncă nu există evaluări
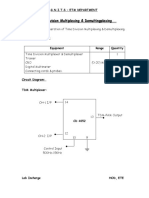
- Time Division Multiplexing & DemultingplexingDocument5 paginiTime Division Multiplexing & Demultingplexingneha yarrapothuÎncă nu există evaluări
- JD700B User Guide R22.0 (207-309)Document103 paginiJD700B User Guide R22.0 (207-309)halfonsoÎncă nu există evaluări
- Cisco TAC Entry Training - 11 - Enhanced Interior Gateway Protocol (EIGRP)Document53 paginiCisco TAC Entry Training - 11 - Enhanced Interior Gateway Protocol (EIGRP)FerasHamdanÎncă nu există evaluări
- Manajemen Pengolahan Data Administrasi KeuanganDocument9 paginiManajemen Pengolahan Data Administrasi KeuanganarnindaÎncă nu există evaluări
- Resume of Dr. Md. Osman GoniDocument10 paginiResume of Dr. Md. Osman Goniosman_goniÎncă nu există evaluări
- Resume HPCL CompressedDocument2 paginiResume HPCL Compressed19UEI014 , PRITAM DebÎncă nu există evaluări
- Hart Am OdalDocument6 paginiHart Am OdalShery MujosÎncă nu există evaluări
- Growing Cambodia'S Civic Technology Ecosystem and Enabling Civil Society InnovationDocument60 paginiGrowing Cambodia'S Civic Technology Ecosystem and Enabling Civil Society InnovationTravisÎncă nu există evaluări
- Gentner DH20/22 ManualDocument32 paginiGentner DH20/22 ManualAdrian GardnerÎncă nu există evaluări
- Network Detection and Response in The SOC SecuronixDocument7 paginiNetwork Detection and Response in The SOC SecuronixAvo AndrinantenainaÎncă nu există evaluări
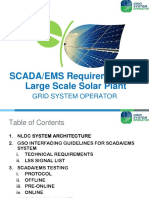
- GSO SCADA/EMS Requirements for Large Scale Solar PlantsDocument22 paginiGSO SCADA/EMS Requirements for Large Scale Solar PlantsSube OhÎncă nu există evaluări
- LCD Module Specifications and CharacteristicsDocument24 paginiLCD Module Specifications and Characteristicsjaime l cruz sÎncă nu există evaluări
- MBD4B/TMF-65-17/18DE-IN - 43-VDI: Antenna SpecificationsDocument3 paginiMBD4B/TMF-65-17/18DE-IN - 43-VDI: Antenna SpecificationsАлександрÎncă nu există evaluări
- Acuson X300 Acuson X300 Pe Acuson X150 Supplement To The User and Reference ManualsDocument18 paginiAcuson X300 Acuson X300 Pe Acuson X150 Supplement To The User and Reference ManualsDaniel BauerÎncă nu există evaluări