S-ar putea să vă placă și
- A Practical Guide To Spline: Mathematics of Computation January 1978Document8 paginiA Practical Guide To Spline: Mathematics of Computation January 1978Suraj BijahalliÎncă nu există evaluări
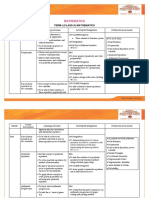
- Mathematics Schemes of Work Form Three 2021: New General Mathematics Book 3Document11 paginiMathematics Schemes of Work Form Three 2021: New General Mathematics Book 3Praise Mafusire100% (1)
- Overhead Travelling Crane ProcedureDocument18 paginiOverhead Travelling Crane Procedurednageshm4n244100% (1)
- Overhead Travelling Crane ProcedureDocument18 paginiOverhead Travelling Crane Procedurednageshm4n244100% (1)
- Introduction To Computer GraphicsDocument26 paginiIntroduction To Computer GraphicsRajasekharReddyGajulapaalliÎncă nu există evaluări
- Introduction To Computer Graphics CS 445 / 645: TransformationsDocument52 paginiIntroduction To Computer Graphics CS 445 / 645: TransformationsNitheeshÎncă nu există evaluări
- Patterns and Visualisation: I. Draw at Least Two Lines of Symmetry For The Given FiguresDocument2 paginiPatterns and Visualisation: I. Draw at Least Two Lines of Symmetry For The Given FiguresKadeeja SainaÎncă nu există evaluări
- Daftar Istilah Matematik Sekolah Menengah PDFDocument21 paginiDaftar Istilah Matematik Sekolah Menengah PDFElrina KazamaÎncă nu există evaluări
- Representation of Curves and SurfacesDocument36 paginiRepresentation of Curves and SurfacesShahmirBalochÎncă nu există evaluări
- Introduction To Computer GraphicsDocument47 paginiIntroduction To Computer GraphicsabhishekmietÎncă nu există evaluări
- Final Copy of Midterm PT in PrecalDocument22 paginiFinal Copy of Midterm PT in Precaldr8ryryz25Încă nu există evaluări
- Bisectors: This Chapter Will Show YouDocument18 paginiBisectors: This Chapter Will Show YouqarreeÎncă nu există evaluări
- Euclidean Geometry Grade 12. (2) DocxDocument27 paginiEuclidean Geometry Grade 12. (2) Docxnomthandazoyende38Încă nu există evaluări
- Computer Graphics 17 - Curves and Surfaces 2: Tom ThorneDocument58 paginiComputer Graphics 17 - Curves and Surfaces 2: Tom Thornevishwajeet patilÎncă nu există evaluări
- Solution Manual For Prealgebra 5Th Edition Lial Hestwood 0321845021 9780321845023 Full Chapter PDFDocument36 paginiSolution Manual For Prealgebra 5Th Edition Lial Hestwood 0321845021 9780321845023 Full Chapter PDFkenneth.shook898100% (12)
- Prealgebra 5th Edition Lial Hestwood Solution ManualDocument79 paginiPrealgebra 5th Edition Lial Hestwood Solution Manualmichael100% (26)
- Physical Science Model Lesson PlanDocument7 paginiPhysical Science Model Lesson Plannineteen oneÎncă nu există evaluări
- I-EMC Syllabus Junior: Subject Topic Subtopic ExplanationDocument1 paginăI-EMC Syllabus Junior: Subject Topic Subtopic ExplanationHerwansyahÎncă nu există evaluări
- A Course of Elementary Mathematics PDFDocument654 paginiA Course of Elementary Mathematics PDFSelf-DeveloperÎncă nu există evaluări
- Component ListDocument75 paginiComponent ListMohammad salman KaziÎncă nu există evaluări
- 03 - Tensor Calculus - Tensor AnalysisDocument12 pagini03 - Tensor Calculus - Tensor AnalysisEduardo Alemany PerretÎncă nu există evaluări
- Review Sheet - Fall FinalDocument4 paginiReview Sheet - Fall FinalmykirbyÎncă nu există evaluări
- Parabola Notes HNDocument158 paginiParabola Notes HNadityavaish739Încă nu există evaluări
- Tensors - 2.dvi - Tensors - OldDocument2 paginiTensors - 2.dvi - Tensors - OldJhon PabonÎncă nu există evaluări
- Mathematics Schemes of Work Form Two 2021: New General Mathematics Book 2Document9 paginiMathematics Schemes of Work Form Two 2021: New General Mathematics Book 2Praise MafusireÎncă nu există evaluări
- 9 5 Lines PlanesDocument13 pagini9 5 Lines PlanesVenu GeorgeÎncă nu există evaluări
- Charcoal CupsDocument1 paginăCharcoal Cupsapi-417919455Încă nu există evaluări
- Mathematics: Term-I (Class-X) MathematicsDocument8 paginiMathematics: Term-I (Class-X) MathematicsNamish MainiÎncă nu există evaluări
- AS Maths Pure ChecklistDocument2 paginiAS Maths Pure Checklististvan.szaboÎncă nu există evaluări
- Format KKTP MTK KURMERDocument12 paginiFormat KKTP MTK KURMERSuciaraÎncă nu există evaluări
- List of Trigonometric IdentitiesDocument18 paginiList of Trigonometric IdentitiesAntonio SilvaÎncă nu există evaluări
- Behaviour and Strength of Tubular Joints - 4apr05Document75 paginiBehaviour and Strength of Tubular Joints - 4apr05weiguang nathanÎncă nu există evaluări
- Tensor 3Document21 paginiTensor 3DavidÎncă nu există evaluări
- CSE291D Lecture 3: Conjugate Priors Generative Models For Discrete DataDocument71 paginiCSE291D Lecture 3: Conjugate Priors Generative Models For Discrete DataballechaseÎncă nu există evaluări
- VENN Diagram RubricsDocument1 paginăVENN Diagram RubricsJohn Bernoulli R. RoblesÎncă nu există evaluări
- Sub-Module 1.1 - Introduction of Computer Graphics - MCQDocument4 paginiSub-Module 1.1 - Introduction of Computer Graphics - MCQNeeraj GuptaÎncă nu există evaluări
- SSSSF: PJBHSH ""Document68 paginiSSSSF: PJBHSH ""Hopeson Kang'omaÎncă nu există evaluări
- Parabola: Introduction To Conic SectionsDocument10 paginiParabola: Introduction To Conic SectionsGURUMARUTHI KUMARÎncă nu există evaluări
- Mega PP - V2Document112 paginiMega PP - V2Tanvir ButaÎncă nu există evaluări
- Lesson 2.1 - Tangent and Derivative: AP CalculusDocument21 paginiLesson 2.1 - Tangent and Derivative: AP CalculusAatrox HavalorÎncă nu există evaluări
- عوﺮﻔﻟﺎﺑ ﺔﺻﺎﺨﻟا تﺎﻴﺿﺎﻳﺮﻟا تﺎﺤﻠﻄﺼﻣ .. algebra. ﺮْﺒ َﺟ geometry ﺔﺳﺪﻨﻫ calculus ﻞﻣﺎﻜﺘﻟاو ﻞﺿﺎﻔﺘﻟا بﺎﺴﺣ statistics تﺎﻴﺋﺎﺼﺣإDocument9 paginiعوﺮﻔﻟﺎﺑ ﺔﺻﺎﺨﻟا تﺎﻴﺿﺎﻳﺮﻟا تﺎﺤﻠﻄﺼﻣ .. algebra. ﺮْﺒ َﺟ geometry ﺔﺳﺪﻨﻫ calculus ﻞﻣﺎﻜﺘﻟاو ﻞﺿﺎﻔﺘﻟا بﺎﺴﺣ statistics تﺎﻴﺋﺎﺼﺣإZeyd HavvaşÎncă nu există evaluări
- LECTURE 11,12 Camera Models: CSE 320 Graphics ProgrammingDocument71 paginiLECTURE 11,12 Camera Models: CSE 320 Graphics ProgrammingIsaac Joel RajÎncă nu există evaluări
- Three Dimensional RepresentationDocument33 paginiThree Dimensional RepresentationWafa ElgalhoudÎncă nu există evaluări
- Y9 Math WorksheetDocument111 paginiY9 Math Worksheetanita_83Încă nu există evaluări
- Assignment Rubrics COURSE: UEME 1233 Manufacturing Technology I (Practical 1: Dimensional Metrology) Name of StudentDocument2 paginiAssignment Rubrics COURSE: UEME 1233 Manufacturing Technology I (Practical 1: Dimensional Metrology) Name of Studentshikai towÎncă nu există evaluări
- Class NotesDocument4 paginiClass NotesindianhimanshupandeyÎncă nu există evaluări
- Class07 Maths NSTSE SampleDocument15 paginiClass07 Maths NSTSE SampleJ SoujanyaÎncă nu există evaluări
- 57863522tensor 254dyadicDocument12 pagini57863522tensor 254dyadicDeepakÎncă nu există evaluări
- PHYSICSDocument18 paginiPHYSICSjannnlateo04Încă nu există evaluări
- A - Practical - Guide - To - Spline - de BoorDocument8 paginiA - Practical - Guide - To - Spline - de BoorgausskishÎncă nu există evaluări
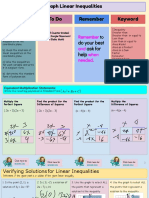
- Linear InequaltiesDocument5 paginiLinear InequaltiesColeen SchrimeathÎncă nu există evaluări
- 17 Curve DetailsDocument49 pagini17 Curve DetailsTommy KongÎncă nu există evaluări
- Bezier Curve Notes Two-D SurfacesDocument4 paginiBezier Curve Notes Two-D SurfacesGp LoveÎncă nu există evaluări
- Patia: Where You're GoingDocument64 paginiPatia: Where You're GoingTanvi VaddeÎncă nu există evaluări
- Year 11 Maths PLC Year 10 and 11Document7 paginiYear 11 Maths PLC Year 10 and 11Rav ChumberÎncă nu există evaluări
- Week 6 (CV)Document59 paginiWeek 6 (CV)humael.hussainÎncă nu există evaluări
- Dynamics04 - Position VectorsDocument19 paginiDynamics04 - Position VectorsagfjtrsÎncă nu există evaluări
- Notes 2Document8 paginiNotes 2TYSON MATIONGÎncă nu există evaluări
- Github Io PDFDocument131 paginiGithub Io PDFLilith KumarÎncă nu există evaluări
- Cadt BasicsDocument2 paginiCadt BasicsATUL CHAUHANÎncă nu există evaluări
- An Introduction to NURBS: With Historical PerspectiveDe la EverandAn Introduction to NURBS: With Historical PerspectiveÎncă nu există evaluări
- Talpuri BrouchersDocument9 paginiTalpuri BroucherskamlaxmiÎncă nu există evaluări
- DesignAnimationTutorial 2010Document24 paginiDesignAnimationTutorial 2010Cristian DogaruÎncă nu există evaluări
- DesignAnimationTutorial 2010Document24 paginiDesignAnimationTutorial 2010Cristian DogaruÎncă nu există evaluări
- Saw Mill TutorialDocument20 paginiSaw Mill TutorialkamlaxmiÎncă nu există evaluări
- Laser Technology Comparison 111406 Rev8Document41 paginiLaser Technology Comparison 111406 Rev8kamlaxmiÎncă nu există evaluări
- ACRYLITEDocument28 paginiACRYLITEBui Hoang DucÎncă nu există evaluări
- Acrylic Sheet Fabrication GuideDocument24 paginiAcrylic Sheet Fabrication GuidekamlaxmiÎncă nu există evaluări
- Cost of Building Cold Storage Cold - StorageDocument6 paginiCost of Building Cold Storage Cold - StorageChetan AgrawalÎncă nu există evaluări
- Variational Formulation of Bar Element: Introduction To FEMDocument17 paginiVariational Formulation of Bar Element: Introduction To FEMkamlaxmiÎncă nu există evaluări
- Fatigue AdvisorDocument16 paginiFatigue AdvisorkamlaxmiÎncă nu există evaluări
- Cad CamDocument30 paginiCad CamkamlaxmiÎncă nu există evaluări
- Eot CranesDocument5 paginiEot CraneskamlaxmiÎncă nu există evaluări
- Best Creo AssemblyDocument18 paginiBest Creo AssemblyPravin PaliwalÎncă nu există evaluări
- Walt DisneyDocument86 paginiWalt DisneyManeet Kohli100% (28)
- Cost of Building Cold Storage Cold - StorageDocument6 paginiCost of Building Cold Storage Cold - StorageChetan AgrawalÎncă nu există evaluări
- Modeling Curves and Surfaces: G. Drew Kessler (Modified by H.Quynh Dinh 3/2003)Document25 paginiModeling Curves and Surfaces: G. Drew Kessler (Modified by H.Quynh Dinh 3/2003)kamlaxmiÎncă nu există evaluări
- Planetary Gear DesignDocument3 paginiPlanetary Gear DesignGururaja TantryÎncă nu există evaluări
- Daily Lesson Log Quarter 1 Week 1Document5 paginiDaily Lesson Log Quarter 1 Week 1John Patrick Famadulan100% (1)
- STS Module 11Document64 paginiSTS Module 11Desiree GalletoÎncă nu există evaluări
- Republic of The Philippines Division of Bohol Department of Education Region VII, Central VisayasDocument6 paginiRepublic of The Philippines Division of Bohol Department of Education Region VII, Central VisayasJOHN MC RAE RACINESÎncă nu există evaluări
- Dynalift Sed0804679lDocument1 paginăDynalift Sed0804679lzaryab khanÎncă nu există evaluări
- Strategic Marketing: The University of Lahore (Islamabad Campus)Document3 paginiStrategic Marketing: The University of Lahore (Islamabad Campus)Sumaira IrshadÎncă nu există evaluări
- Amritsar Police StationDocument5 paginiAmritsar Police StationRashmi KbÎncă nu există evaluări
- Working Capital Management 2012 of HINDALCO INDUSTRIES LTD.Document98 paginiWorking Capital Management 2012 of HINDALCO INDUSTRIES LTD.Pratyush Dubey100% (1)
- European Construction Sector Observatory: Country Profile MaltaDocument40 paginiEuropean Construction Sector Observatory: Country Profile MaltaRainbootÎncă nu există evaluări
- Omnitron CatalogDocument180 paginiOmnitron Catalogjamal AlawsuÎncă nu există evaluări
- Philhis 1blm Group 6 ReportDocument19 paginiPhilhis 1blm Group 6 Reporttaehyung trashÎncă nu există evaluări
- CCDocument5 paginiCCnazmulÎncă nu există evaluări
- Term Paper Inorganic PolymersDocument24 paginiTerm Paper Inorganic PolymersCasey Karua0% (1)
- Pelayo PathopyhsiologyDocument13 paginiPelayo PathopyhsiologyE.J. PelayoÎncă nu există evaluări
- RECYFIX STANDARD 100 Tipe 010 MW - C250Document2 paginiRECYFIX STANDARD 100 Tipe 010 MW - C250Dadang KurniaÎncă nu există evaluări
- Internship Format HRMI620Document4 paginiInternship Format HRMI620nimra tariqÎncă nu există evaluări
- Erosional VelocityDocument15 paginiErosional VelocityGary JonesÎncă nu există evaluări
- All India Civil Services Coaching Centre, Chennai - 28Document4 paginiAll India Civil Services Coaching Centre, Chennai - 28prakashÎncă nu există evaluări
- John Wren-Lewis - NDEDocument7 paginiJohn Wren-Lewis - NDEpointandspaceÎncă nu există evaluări
- Sermon Manuscript Galatians 5:16-26Document9 paginiSermon Manuscript Galatians 5:16-26Nathaniel ParkerÎncă nu există evaluări
- Reflection On The PoorDocument5 paginiReflection On The Poorapi-347831792Încă nu există evaluări
- Alphabetic KnowledgeDocument8 paginiAlphabetic KnowledgejsdgjdÎncă nu există evaluări
- Rotating Equipment & ServiceDocument12 paginiRotating Equipment & Servicenurkasih119Încă nu există evaluări
- Galman V PamaranDocument7 paginiGalman V PamaranChow Momville EstimoÎncă nu există evaluări
- 2023 Teacher Email ListDocument5 pagini2023 Teacher Email ListmunazamfbsÎncă nu există evaluări
- Nfpa 1126 PDFDocument24 paginiNfpa 1126 PDFL LÎncă nu există evaluări
- Designing and Drawing PropellerDocument4 paginiDesigning and Drawing Propellercumpio425428100% (1)
- Lalit Resume-2023-LatestDocument2 paginiLalit Resume-2023-LatestDrew LadlowÎncă nu există evaluări
- KundaliniDocument3 paginiKundaliniAlfred IDunnoÎncă nu există evaluări
- IMDSI22Document82 paginiIMDSI22Dang JinlongÎncă nu există evaluări