S-ar putea să vă placă și
- Operating Systems Interview Questions You'll Most Likely Be AskedDe la EverandOperating Systems Interview Questions You'll Most Likely Be AskedÎncă nu există evaluări
- Os 6Document41 paginiOs 6kareem mohamedÎncă nu există evaluări
- Process Management: BY N.MadhuriDocument168 paginiProcess Management: BY N.Madhurimanjula mandavaÎncă nu există evaluări
- Operating System Processes and CPU SchedulingDocument39 paginiOperating System Processes and CPU SchedulingRadhika BadbadeÎncă nu există evaluări
- Os Unit 2Document60 paginiOs Unit 2Anish Dubey SultanpurÎncă nu există evaluări
- OS Chapter 2Document101 paginiOS Chapter 2200339616138Încă nu există evaluări
- Chapter 3Document58 paginiChapter 3Adarsh A AÎncă nu există evaluări
- Operating Systems: WEEK 5 - ProcessesDocument21 paginiOperating Systems: WEEK 5 - ProcessesYano NettleÎncă nu există evaluări
- Chapter - 4 - Process and Process ManagementDocument14 paginiChapter - 4 - Process and Process ManagementNabaa 'Abdallah Salim Al SanidiaÎncă nu există evaluări
- Introduction of Process ManagementDocument18 paginiIntroduction of Process Managementnanekaraditya06Încă nu există evaluări
- Processes: Lenmar T. Catajay, CoeDocument62 paginiProcesses: Lenmar T. Catajay, Coebraynat kobeÎncă nu există evaluări
- Process ManagementDocument25 paginiProcess ManagementLinda BrownÎncă nu există evaluări
- Unit 3 OSDocument45 paginiUnit 3 OSha.ra.d.e.vi.e.rÎncă nu există evaluări
- OS Unit-2-NotesDocument50 paginiOS Unit-2-NotesSai someoneÎncă nu există evaluări
- Ch. 4 ... Part - 1Document52 paginiCh. 4 ... Part - 1VÎncă nu există evaluări
- Os Process ManagementDocument25 paginiOs Process ManagementVishal Yadav Xll CÎncă nu există evaluări
- Process ManagementDocument78 paginiProcess ManagementRakesh PatilÎncă nu există evaluări
- Os 1Document31 paginiOs 1Sarang UdgaveÎncă nu există evaluări
- Unit 2 Material - 1Document20 paginiUnit 2 Material - 1meghal prajapatiÎncă nu există evaluări
- OS Chapter 3Document15 paginiOS Chapter 3root18Încă nu există evaluări
- 659892241-OS Unit-1Document19 pagini659892241-OS Unit-1krishna naniÎncă nu există evaluări
- Introduction To Operating SystemDocument86 paginiIntroduction To Operating SystemKunal SinalkarÎncă nu există evaluări
- Os Unit-2 IPCDocument33 paginiOs Unit-2 IPCmudduswamyÎncă nu există evaluări
- Process Management: By: Modaser SadatDocument10 paginiProcess Management: By: Modaser SadatModaser SadatÎncă nu există evaluări
- Processes: 3.1 Process ConceptDocument24 paginiProcesses: 3.1 Process ConceptexcitekarthikÎncă nu există evaluări
- Operating System NotesDocument68 paginiOperating System NotesPratyush GoelÎncă nu există evaluări
- Unit 2-Process MnagementDocument18 paginiUnit 2-Process MnagementHabtie TesfahunÎncă nu există evaluări
- Introduction To Process: Courtesy: Text Book: OS Principles by SilberschatzDocument111 paginiIntroduction To Process: Courtesy: Text Book: OS Principles by SilberschatzGaurav SharmaÎncă nu există evaluări
- 04 Process Process MGT - 3Document34 pagini04 Process Process MGT - 3Jacob AbrahamÎncă nu există evaluări
- Ch. 2 ... Part - 1Document31 paginiCh. 2 ... Part - 1VÎncă nu există evaluări
- CHP 2 Process ManagementDocument30 paginiCHP 2 Process ManagementAditiÎncă nu există evaluări
- Chapter 2&3Document21 paginiChapter 2&3Minte JoÎncă nu există evaluări
- Lecture 3 OSDocument33 paginiLecture 3 OSaidanakarib3Încă nu există evaluări
- Process and ThreadsDocument11 paginiProcess and ThreadsLouie Gene SanquiÎncă nu există evaluări
- Chapter-2 Process ManagementDocument56 paginiChapter-2 Process ManagementbellaÎncă nu există evaluări
- Os Operating SystemDocument8 paginiOs Operating SystemanithaÎncă nu există evaluări
- CH 3 (Processes)Document12 paginiCH 3 (Processes)Muhammad ImranÎncă nu există evaluări
- Unit 2 Process ManagementDocument30 paginiUnit 2 Process ManagementTapan RanaÎncă nu există evaluări
- Lecture 2 - ProcessesDocument55 paginiLecture 2 - Processesfiraol.buloÎncă nu există evaluări
- UNIT - 3 - Process ConceptsDocument30 paginiUNIT - 3 - Process ConceptsAyush ShresthaÎncă nu există evaluări
- Unit IIDocument19 paginiUnit IIadityapawar1865Încă nu există evaluări
- Unit 5Document45 paginiUnit 5Abhinav JaiswalÎncă nu există evaluări
- Unit 2 - Process ManagementDocument118 paginiUnit 2 - Process ManagementARVIND HÎncă nu există evaluări
- Process Scheduling in OSDocument37 paginiProcess Scheduling in OSCherryÎncă nu există evaluări
- Process ManagementDocument21 paginiProcess ManagementJin ZeionÎncă nu există evaluări
- Process and CPU Scheduling: Part - IIDocument53 paginiProcess and CPU Scheduling: Part - IIAnantharaj ManojÎncă nu există evaluări
- Dragon Book Chapter 3 Til 3.3Document11 paginiDragon Book Chapter 3 Til 3.3wexilo1963Încă nu există evaluări
- Unit - 2Document76 paginiUnit - 2Vamsi KrishnaÎncă nu există evaluări
- OS Unit-2Document51 paginiOS Unit-2ANGATI VIJAY KUMAR VU21CSEN0101048Încă nu există evaluări
- OS2Document35 paginiOS2nasir jaanÎncă nu există evaluări
- Unit 2 - Os - PPT (1)Document121 paginiUnit 2 - Os - PPT (1)naga venkatesh kolapalliÎncă nu există evaluări
- CSE-3221 Lecture-02 Ch#03 ProcessDocument16 paginiCSE-3221 Lecture-02 Ch#03 ProcessM A RobÎncă nu există evaluări
- CsTutorialpoint - Operating System-Unit2-Complete PDFDocument63 paginiCsTutorialpoint - Operating System-Unit2-Complete PDFGunjan VijayVargiyaÎncă nu există evaluări
- Processes Management 3.1 Processes: Chapter ThreeDocument21 paginiProcesses Management 3.1 Processes: Chapter ThreejamacÎncă nu există evaluări
- Unit - Ii Process Management, Synchronization and ThreadsDocument48 paginiUnit - Ii Process Management, Synchronization and ThreadsFiringPhoenixShivaÎncă nu există evaluări
- Question: Explain Context SwitchingDocument10 paginiQuestion: Explain Context SwitchingpathakpranavÎncă nu există evaluări
- Operating System: Lecture #5 Process ManagementDocument21 paginiOperating System: Lecture #5 Process Managementsrinivas yanamandraÎncă nu există evaluări
- Lect 2 OSDocument27 paginiLect 2 OSChogeÎncă nu există evaluări
- Ringkasa Part 2 InggrisDocument10 paginiRingkasa Part 2 InggrisWarsinasariÎncă nu există evaluări
- Flip Class: Task Process Multiprocessing MultitaskingDocument17 paginiFlip Class: Task Process Multiprocessing MultitaskingSAKSHI RAINAÎncă nu există evaluări
- Chapter 1 Introduction PDFDocument77 paginiChapter 1 Introduction PDFDeepBhaleraoÎncă nu există evaluări
- How To Open Nfo FilesDocument1 paginăHow To Open Nfo Filesjude_abarcaÎncă nu există evaluări
- CSS Essential Training 2Document3 paginiCSS Essential Training 2AMAN SINHAÎncă nu există evaluări
- Communication Theory of Secrecy SystemsDocument60 paginiCommunication Theory of Secrecy SystemsDavasarkÎncă nu există evaluări
- ReleaseNote FileList of GL553VD WIN10 64 V3.00Document2 paginiReleaseNote FileList of GL553VD WIN10 64 V3.00DeepBhaleraoÎncă nu există evaluări
- Amity Jee Candidate Steps For SchedulingDocument8 paginiAmity Jee Candidate Steps For SchedulingDeepBhaleraoÎncă nu există evaluări
- File ListDocument10 paginiFile ListDeepBhaleraoÎncă nu există evaluări
- Reason PDFDocument1 paginăReason PDFDeepBhaleraoÎncă nu există evaluări
- ReasonDocument1 paginăReasonDeepBhaleraoÎncă nu există evaluări
- READMEDocument22 paginiREADMEwhitergÎncă nu există evaluări
- Reason This Is Justfor DownloadingDocument1 paginăReason This Is Justfor DownloadingDeepBhaleraoÎncă nu există evaluări
- NEWSDocument183 paginiNEWSSebastian BaqueroÎncă nu există evaluări
- Video PDFDocument2 paginiVideo PDFDeepBhaleraoÎncă nu există evaluări
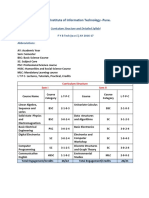
- IIITP - FYBTech - Curriculum - Structure& Syllabus PDFDocument29 paginiIIITP - FYBTech - Curriculum - Structure& Syllabus PDFDeepBhaleraoÎncă nu există evaluări
- Producer Concumer Using SemaphoreDocument10 paginiProducer Concumer Using SemaphorerakhikrishnarpillaiÎncă nu există evaluări
- MCQ On OS Per AKTU Syllabus (Part-1) )Document131 paginiMCQ On OS Per AKTU Syllabus (Part-1) )Rajeev BansalÎncă nu există evaluări
- G22Document118 paginiG22Sachchidanand ShuklaÎncă nu există evaluări
- OS Lab ManualDocument76 paginiOS Lab Manual148 Sherin SÎncă nu există evaluări
- Concurrencia PDFDocument160 paginiConcurrencia PDFreoguanÎncă nu există evaluări
- Lab 3Document18 paginiLab 3Phú ĐoànÎncă nu există evaluări
- Unit-1 Concurrent and Parallel Programming Syllabus: Concurrent Versus Sequential Programming. Concurrent Programming ConstructsDocument26 paginiUnit-1 Concurrent and Parallel Programming Syllabus: Concurrent Versus Sequential Programming. Concurrent Programming ConstructsSandhya GubbalaÎncă nu există evaluări
- Operating System Lab Manual: Ex - No:1.a Basics of Unix Commands Introduction To UnixDocument68 paginiOperating System Lab Manual: Ex - No:1.a Basics of Unix Commands Introduction To UnixLeeladhar KushwahaÎncă nu există evaluări
- CS162 Operating Systems and Systems Programming Mutual Exclusion, Semaphores, Monitors, and Condition VariablesDocument32 paginiCS162 Operating Systems and Systems Programming Mutual Exclusion, Semaphores, Monitors, and Condition VariablesnestyibnruzhdiÎncă nu există evaluări
- Os Manual (Arranged)Document78 paginiOs Manual (Arranged)P.DhivyaÎncă nu există evaluări
- Lets Synchronize Threads in PythonDocument8 paginiLets Synchronize Threads in PythonvsnpradeepÎncă nu există evaluări
- Process Synchronization: Silberschatz, Galvin and Gagne ©2013 Operating System Concepts - 9 EditionDocument66 paginiProcess Synchronization: Silberschatz, Galvin and Gagne ©2013 Operating System Concepts - 9 EditionUtkarshÎncă nu există evaluări
- Static Class Counter (Int Count Void Inc (Count Count+1 ) Int Getcount (Return Count ) )Document9 paginiStatic Class Counter (Int Count Void Inc (Count Count+1 ) Int Getcount (Return Count ) )amin khanÎncă nu există evaluări
- Operating System BCL204Document34 paginiOperating System BCL204Sahil GandhiÎncă nu există evaluări
- Thread Communication. Sample Input and Sample Output:: S.No: 25 Date: 2022-06-15Document3 paginiThread Communication. Sample Input and Sample Output:: S.No: 25 Date: 2022-06-15Saiganesh ReddymeniÎncă nu există evaluări
- CSC 212 - Operating SystemDocument115 paginiCSC 212 - Operating SystemObiwusi KolawoleÎncă nu există evaluări
- Chapter02-Processes and Threads PDFDocument74 paginiChapter02-Processes and Threads PDFAydin GaniyevÎncă nu există evaluări
- Lecture 5 - Inter Process CommunicationDocument17 paginiLecture 5 - Inter Process CommunicationtalentÎncă nu există evaluări
- CS604 - Finalterm Solved Mcqs Solved With ReferencesDocument49 paginiCS604 - Finalterm Solved Mcqs Solved With ReferencesPrincessRabiÎncă nu există evaluări
- Unit 2Document19 paginiUnit 2ONLINE hapurÎncă nu există evaluări
- Operating System Question Bank FinalDocument22 paginiOperating System Question Bank FinalRoushan GiriÎncă nu există evaluări
- Unit-3 OSDocument19 paginiUnit-3 OSTia SharmaÎncă nu există evaluări
- Classical IPC Problems Reader's and Writer ProblemDocument79 paginiClassical IPC Problems Reader's and Writer ProblemRamagopal VemuriÎncă nu există evaluări
- Chapter II. Process Management: 2.1 OverviewDocument17 paginiChapter II. Process Management: 2.1 OverviewRediet BadieÎncă nu există evaluări
- Name: Pranav Chaurasia REG. NO.: 18BCE0216 Os Lab Assessment-3 SLOT: L41 + L42 Faculty: Geraldine Bessie Ma'AmDocument10 paginiName: Pranav Chaurasia REG. NO.: 18BCE0216 Os Lab Assessment-3 SLOT: L41 + L42 Faculty: Geraldine Bessie Ma'AmPranav Chaurasia 18BCE0216Încă nu există evaluări
- Chapter 2 - Process and Process ManagementDocument144 paginiChapter 2 - Process and Process ManagementGudata GechoÎncă nu există evaluări
- Multiprogramming: Concurrency Improves ThroughputDocument38 paginiMultiprogramming: Concurrency Improves ThroughputFiroj AnsariÎncă nu există evaluări
- Operating System: Chapter - Process SynchronisationDocument86 paginiOperating System: Chapter - Process SynchronisationFaizal KhanÎncă nu există evaluări
- Process Synchronization III: Indranil Gupta Sep 16, 2005Document17 paginiProcess Synchronization III: Indranil Gupta Sep 16, 2005Nikhil SumanÎncă nu există evaluări
- Unit 3 (3.3) Inter Process Communication (IPC)Document18 paginiUnit 3 (3.3) Inter Process Communication (IPC)Tushar HedauÎncă nu există evaluări