S-ar putea să vă placă și
- Ecosonda ExposionDocument29 paginiEcosonda ExposionmancerlÎncă nu există evaluări
- EcosondaDocument7 paginiEcosondaGustavo Cervantes Avila100% (1)
- EcosondaDocument4 paginiEcosondaElyshita Siesquen KjusolÎncă nu există evaluări
- Disertacion Sondaje y EcosondasDocument5 paginiDisertacion Sondaje y EcosondasDaniella SeguraÎncă nu există evaluări
- Equipos Auxiliares de Pesca-Artes y AparejoDocument12 paginiEquipos Auxiliares de Pesca-Artes y AparejoLenner Jhandri Gutierrez CespedesÎncă nu există evaluări
- GPS EcosondasDocument5 paginiGPS EcosondasSubaru ExGÎncă nu există evaluări
- Capitan PhillipsDocument5 paginiCapitan PhillipsGilberto ZequeiraÎncă nu există evaluări
- Publicaciones NauticasDocument2 paginiPublicaciones NauticasZvbnz Zxzxbz WbzngÎncă nu există evaluări
- Instrumentos de NavegacionDocument2 paginiInstrumentos de NavegacionANA LUCIA RODRIGUEZ RIVERAÎncă nu există evaluări
- IPesq - CapIV - Sonar - 2018 PDFDocument24 paginiIPesq - CapIV - Sonar - 2018 PDFDianaKarinaRamosRosasÎncă nu există evaluări
- Principios Básicos Del RadarDocument6 paginiPrincipios Básicos Del RadarFernando Alberto Lira GómezÎncă nu există evaluări
- Giro CompasDocument29 paginiGiro CompasFlor Rojas100% (2)
- ELECTROACUSTICADocument54 paginiELECTROACUSTICAElmer Escobedo100% (1)
- Cuestionario Navegación Electrónica PDFDocument10 paginiCuestionario Navegación Electrónica PDFkikeÎncă nu există evaluări
- Equipos ElectronicosDocument50 paginiEquipos ElectronicosING. JULIO FERNANDO DIAZ MAMANIÎncă nu există evaluări
- La Fortuna de MarDocument14 paginiLa Fortuna de MaradimantoÎncă nu există evaluări
- Ecosonda PDFDocument23 paginiEcosonda PDFDonna MayverickÎncă nu există evaluări
- Temario Patron CosteroDocument7 paginiTemario Patron CosteroJorge MarcosÎncă nu există evaluări
- Reglamento General de Matricula Del Personal de Gente de Mar, Fluvial y LacustreDocument33 paginiReglamento General de Matricula Del Personal de Gente de Mar, Fluvial y LacustreJonathan Almonacid IglesiasÎncă nu există evaluări
- Anave Convenio Agua de LastreDocument23 paginiAnave Convenio Agua de LastreKarim Sowley Delgado100% (1)
- Trabajo Final MaterialesDocument52 paginiTrabajo Final MaterialesChristy JoÎncă nu există evaluări
- EPIRBDocument12 paginiEPIRBJosé Pérez CamachoÎncă nu există evaluări
- Variaciones Del Campo MagnéticoDocument2 paginiVariaciones Del Campo Magnéticobdlnieves100% (2)
- Electronica SubmarinaDocument59 paginiElectronica SubmarinaJuni ClutersÎncă nu există evaluări
- Archivos Grib Metereologicos en OpencpnDocument9 paginiArchivos Grib Metereologicos en Opencpnignacio aditecÎncă nu există evaluări
- Exposicion Curso XviDocument102 paginiExposicion Curso XviMiguel Oswaldo Delgado GarciaÎncă nu există evaluări
- Buque MultiusosDocument6 paginiBuque MultiusosGenesis CabelloÎncă nu există evaluări
- Guia Oficial Navegante 2005Document90 paginiGuia Oficial Navegante 2005Luis BonillaÎncă nu există evaluări
- Comunicaciones Marítimas.-Bandas de FrecuenciasDocument8 paginiComunicaciones Marítimas.-Bandas de FrecuenciasDavid PadillaÎncă nu există evaluări
- Publicaciones NauticasDocument18 paginiPublicaciones NauticasCarlos CerónÎncă nu există evaluări
- Sonda Nautica 2Document54 paginiSonda Nautica 2Lucero AtaoÎncă nu există evaluări
- INMARSAT - C.ppsDocument67 paginiINMARSAT - C.ppsJuan CatalanÎncă nu există evaluări
- Manual de Equipos Electronicos para Pesca y Navegación IiDocument89 paginiManual de Equipos Electronicos para Pesca y Navegación IiJose TumeÎncă nu există evaluări
- El Radar MarinoDocument14 paginiEl Radar MarinoKleiber Huarca100% (1)
- ANEXO I Modelización Acústica SubmarinaDocument85 paginiANEXO I Modelización Acústica SubmarinaRicardo Alonso Muñoz CanalesÎncă nu există evaluări
- Traduccion Manual RadarDocument49 paginiTraduccion Manual RadarHector Barra VergaraÎncă nu există evaluări
- El Cuarto de Derrota y Lo Que ContieneDocument50 paginiEl Cuarto de Derrota y Lo Que ContienemigarÎncă nu există evaluări
- Generalintroductionradar PDFDocument133 paginiGeneralintroductionradar PDFJackii AguilarÎncă nu există evaluări
- Radionavegacion - Tema RadaresDocument16 paginiRadionavegacion - Tema RadaresBrayan Omar GonzalesÎncă nu există evaluări
- TEMA 3 Conocimintos Del BuqueDocument17 paginiTEMA 3 Conocimintos Del BuqueJose Gerardo SanchezÎncă nu există evaluări
- Manual Radar ARPADocument118 paginiManual Radar ARPAAlberto Riobo IglesiasÎncă nu există evaluări
- Gmdss Charla de NavegacionDocument15 paginiGmdss Charla de NavegacionArdel EstherÎncă nu există evaluări
- Sistema de Identificación Automatica (Ais)Document18 paginiSistema de Identificación Automatica (Ais)juand2100% (1)
- 1 Arpa RadarDocument29 pagini1 Arpa RadarAZUCENA DEL MAR AQUINO SAUCEDOÎncă nu există evaluări
- 16 El Valor Del Conocimiento, Concepto, Representantes, Objetividad y Certeza de La Inducción y Deducción"Document19 pagini16 El Valor Del Conocimiento, Concepto, Representantes, Objetividad y Certeza de La Inducción y Deducción"Maria De Los Angeles Loza LaquiÎncă nu există evaluări
- Word de Compas Satelital Por Terminar-1Document9 paginiWord de Compas Satelital Por Terminar-1JOSEPH OSCAR ROJAS CASTILLOÎncă nu există evaluări
- Presentacion Unidad IDocument14 paginiPresentacion Unidad IFernando Cubides100% (1)
- Info RadarDocument24 paginiInfo RadarHumberto MendozaÎncă nu există evaluări
- Qué Es El Sistema AisDocument7 paginiQué Es El Sistema AisEliecer MorenoÎncă nu există evaluări
- ANTOLOGIA PRACTICAS MARINERAS IV CorregidoDocument101 paginiANTOLOGIA PRACTICAS MARINERAS IV CorregidoFernando Alberto Lira Gómez100% (1)
- Diferentes Tipos de Arte de PescaDocument13 paginiDiferentes Tipos de Arte de PescaSandy YLeoÎncă nu există evaluări
- GFPI-F-135 - Guía - OMI 1.27Document26 paginiGFPI-F-135 - Guía - OMI 1.27kelly herreraÎncă nu există evaluări
- Navegacion I - Ramiro GuillenDocument110 paginiNavegacion I - Ramiro GuillenDiego Sanzetenea ReinickeÎncă nu există evaluări
- Cap 02 Orient Ac I On y DireccionDocument22 paginiCap 02 Orient Ac I On y Direccionjose claudio melo100% (1)
- Clase Nro 1 IntroduccionDocument40 paginiClase Nro 1 IntroduccionRamon Velasco Stoll100% (1)
- Simulador de Puente I - Unidad 2 2do Año CubiertaDocument43 paginiSimulador de Puente I - Unidad 2 2do Año CubiertamilesÎncă nu există evaluări
- SondasDocument4 paginiSondasAlberto Riobo IglesiasÎncă nu există evaluări
- El EcosondaDocument15 paginiEl EcosondaAlexander Sobrino ColánÎncă nu există evaluări
- Manual Basico Del Uso de Sondas para El JiggingDocument27 paginiManual Basico Del Uso de Sondas para El JiggingJORGE LUIS MARRERO DIAZÎncă nu există evaluări
- Ultrasonidos: Nivel IIDe la EverandUltrasonidos: Nivel IIEvaluare: 5 din 5 stele5/5 (1)
- Plaxis3D V20 - Consolidación y Análisis de Estabilidad de Un Terraplén PDFDocument26 paginiPlaxis3D V20 - Consolidación y Análisis de Estabilidad de Un Terraplén PDFMCÎncă nu există evaluări
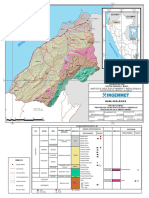
- MAPA Geológico - TUMBESDocument1 paginăMAPA Geológico - TUMBESMCÎncă nu există evaluări
- PLAXIS 3D V20 en Espanol Tutorial para A PDFDocument15 paginiPLAXIS 3D V20 en Espanol Tutorial para A PDFMCÎncă nu există evaluări
- 1 Congreso Sismo Geotecnia PDFDocument23 pagini1 Congreso Sismo Geotecnia PDFMCÎncă nu există evaluări
- Manual Entrenamiento Midas CivilDocument20 paginiManual Entrenamiento Midas CivilMCÎncă nu există evaluări
- Historia de La Sismología PDFDocument5 paginiHistoria de La Sismología PDFIosHiro Betancur PinedaÎncă nu există evaluări
- AEROFOTOGRAMETRIADocument51 paginiAEROFOTOGRAMETRIAMC100% (1)
- Casa ComunalDocument34 paginiCasa ComunalLino Anderson Velazque CarrascoÎncă nu există evaluări
- Tarea JavelDocument3 paginiTarea JavelCRISTOPHER FFÎncă nu există evaluări
- Hidrologia Cap03Document18 paginiHidrologia Cap03Luis Diaz RodriguezÎncă nu există evaluări
- Diseño de CanalDocument16 paginiDiseño de CanalWalter Orlando Collazos FloresÎncă nu există evaluări
- Funcionamiento Del Motor DieselDocument15 paginiFuncionamiento Del Motor DieselPedro Calderon VasquezÎncă nu există evaluări
- Ensayo Unidad 3Document14 paginiEnsayo Unidad 3ronny delacruzÎncă nu există evaluări
- Clase HIDROGEOLOGÍA SET18Document66 paginiClase HIDROGEOLOGÍA SET18Dajhanna Grados AlvaradoÎncă nu există evaluări
- Experiencia 6-Balmer PDFDocument5 paginiExperiencia 6-Balmer PDFPilargomez97Încă nu există evaluări
- HOJA DE FoRMULASDocument4 paginiHOJA DE FoRMULASsabrinaÎncă nu există evaluări
- Yi CJGDocument104 paginiYi CJGCésar Belizario BarredaÎncă nu există evaluări
- Arroyo-Falla-Informe 3 - Intercambiadores de CalorDocument3 paginiArroyo-Falla-Informe 3 - Intercambiadores de CalorIsabellaÎncă nu există evaluări
- Tabla y Ecuaciones WhiteDocument4 paginiTabla y Ecuaciones WhiteRaiser AsmodeusÎncă nu există evaluări
- TERMODINAMICA Fisica 2Document35 paginiTERMODINAMICA Fisica 2Cristhian Vicente Toro Soberon0% (1)
- DinámicaDocument439 paginiDinámicaKarol LópezÎncă nu există evaluări
- AquaReturn WiloDocument19 paginiAquaReturn WiloCarolo DemoÎncă nu există evaluări
- Línea Eco Frío/Calor 5000 Watts: Ficha TécnicaDocument2 paginiLínea Eco Frío/Calor 5000 Watts: Ficha TécnicaCaty 2019Încă nu există evaluări
- Corrosion Quimica Trabajo UnedDocument6 paginiCorrosion Quimica Trabajo Unedjapmz1973Încă nu există evaluări
- 0.corte - GTPDocument10 pagini0.corte - GTPTomas IbarlinÎncă nu există evaluări
- Corrosión Por h2s y Co2 en La IndustriaDocument8 paginiCorrosión Por h2s y Co2 en La IndustriaGabi VillarrealÎncă nu există evaluări
- Diseño Camara CRPDocument3 paginiDiseño Camara CRPRONALD DAVILA HUERTOÎncă nu există evaluări
- Quimica InformeDocument13 paginiQuimica InformeValeria GrandeÎncă nu există evaluări
- Paper Fatiga Por Cargas VariablesDocument7 paginiPaper Fatiga Por Cargas VariablesElieser MirandaÎncă nu există evaluări
- Entregable 2 Mecanica para IngenieriaDocument6 paginiEntregable 2 Mecanica para IngenieriaJosé Larssen TrujilloÎncă nu există evaluări
- Practica 01 ViscometriaDocument16 paginiPractica 01 ViscometriaYarely EspinozaÎncă nu există evaluări
- T-2 Alison JohnsonDocument8 paginiT-2 Alison JohnsonAugusto QuirozÎncă nu există evaluări
- Ejercicios de MASDocument4 paginiEjercicios de MASCristian Daniel CORAL SANCHEZÎncă nu există evaluări
- Pretensado 2019 - I, (23 - 56)Document34 paginiPretensado 2019 - I, (23 - 56)jplacios100% (1)
- 07 Hormigón PretensadoDocument15 pagini07 Hormigón PretensadoMarco Antonio FerrufinoÎncă nu există evaluări
- Análisis Vigas Estáticamente IndeterminadasDocument4 paginiAnálisis Vigas Estáticamente IndeterminadasCarlos Cepeda LópezÎncă nu există evaluări
- Experimento ReynoldsDocument19 paginiExperimento ReynoldsRobinson David DíazÎncă nu există evaluări