S-ar putea să vă placă și
- 4 Controlled Rectifier DC Drives - PpsDocument25 pagini4 Controlled Rectifier DC Drives - PpsaswardiÎncă nu există evaluări
- DC Drives CHOPPERDocument24 paginiDC Drives CHOPPERDetia Enda TrivillaÎncă nu există evaluări
- 3 Controlled Rectifier DC DrivesDocument23 pagini3 Controlled Rectifier DC DrivesrajapeeeÎncă nu există evaluări
- 2 Controlled Rectifier DC DrivesDocument25 pagini2 Controlled Rectifier DC DrivesrajapeeeÎncă nu există evaluări
- DC Motor - Drive 2019Document80 paginiDC Motor - Drive 2019ali ramadanÎncă nu există evaluări
- Analog and Digital CircuitsDocument52 paginiAnalog and Digital CircuitsAlfredÎncă nu există evaluări
- Speed Control of DC Machine: Dr. Sushma Gupta Professor Department of Electrical Engineering MANIT, BhopalDocument73 paginiSpeed Control of DC Machine: Dr. Sushma Gupta Professor Department of Electrical Engineering MANIT, BhopalVenomÎncă nu există evaluări
- Voltage Transformers: P&E Center T&I / Nov. 2006 Plan - VtsDocument8 paginiVoltage Transformers: P&E Center T&I / Nov. 2006 Plan - VtsYousefÎncă nu există evaluări
- One-Line Diagram: Simplified Single-Phase Balanced Three-Phase Single Line Apparatus SymbolsDocument24 paginiOne-Line Diagram: Simplified Single-Phase Balanced Three-Phase Single Line Apparatus SymbolsSyazwan HafidziÎncă nu există evaluări
- PART 1 Review QuestionsDocument11 paginiPART 1 Review QuestionsStefan RediuÎncă nu există evaluări
- DC Drives Conv Chop Fed PDFDocument59 paginiDC Drives Conv Chop Fed PDFSPARSH RAJÎncă nu există evaluări
- Chint 666Document6 paginiChint 666StipeÎncă nu există evaluări
- EE 2802 - Transformers - Concise NoteDocument10 paginiEE 2802 - Transformers - Concise NoteLasal RÎncă nu există evaluări
- Mobile Phone Charger ReferencesDocument13 paginiMobile Phone Charger ReferencesMohd Amirul AkmalÎncă nu există evaluări
- Lecture DC MachinesDocument40 paginiLecture DC MachinesPrathap VuyyuruÎncă nu există evaluări
- Electrical Systems-2Document38 paginiElectrical Systems-2Pegah JanbakhshÎncă nu există evaluări
- Green University of Bangladesh: Faculty of Science and EngineeringDocument4 paginiGreen University of Bangladesh: Faculty of Science and EngineeringHaytham KenwayÎncă nu există evaluări
- Unit - I: Basic Performance Equations of D.C. MotorsDocument21 paginiUnit - I: Basic Performance Equations of D.C. MotorsNoah AdityaÎncă nu există evaluări
- Exp - 01Document3 paginiExp - 01Antor KhanÎncă nu există evaluări
- TransformersDocument24 paginiTransformersWonbae ChoiÎncă nu există evaluări
- 4 Controlled Rectifier DC DrivesDocument25 pagini4 Controlled Rectifier DC DrivesshonmlrÎncă nu există evaluări
- Module-3 (B) - AC Controllers - VII-POWER ELECTRONICS - 2015-17 SchemeDocument48 paginiModule-3 (B) - AC Controllers - VII-POWER ELECTRONICS - 2015-17 SchemeK N DEEPSHIÎncă nu există evaluări
- Lab16 PDFDocument6 paginiLab16 PDFIndika WithanageÎncă nu există evaluări
- Emech Exp-1Document13 paginiEmech Exp-1ATCÎncă nu există evaluări
- PPML - Pertemuan 4Document16 paginiPPML - Pertemuan 4Farhan FabiantoÎncă nu există evaluări
- Controlled Rectifier DC DrivesDocument26 paginiControlled Rectifier DC DrivesFajri Dzulfiqar RosmanaÎncă nu există evaluări
- Control of DC Machines Drive: Fall 2014 Department of Electrical Engineering GC, University, LahoreDocument25 paginiControl of DC Machines Drive: Fall 2014 Department of Electrical Engineering GC, University, LahoremayajogiÎncă nu există evaluări
- Lecture 11. Control Q-U 2020Document77 paginiLecture 11. Control Q-U 2020filip.porebski69Încă nu există evaluări
- EPS Script 9 v22 PDFDocument6 paginiEPS Script 9 v22 PDFStuardo López MéndezÎncă nu există evaluări
- EENG 105 Midterms ReviewerDocument5 paginiEENG 105 Midterms Reviewermarkreuben.famillaranÎncă nu există evaluări
- ELE8331 Power System Control Dr. Nuraddeen MagajiDocument25 paginiELE8331 Power System Control Dr. Nuraddeen MagajiumarsaboÎncă nu există evaluări
- FYDP Presentation For Coreless GeneratorDocument44 paginiFYDP Presentation For Coreless GeneratorSaeed BadshahÎncă nu există evaluări
- Machines Lab ManualDocument124 paginiMachines Lab ManualpurushothÎncă nu există evaluări
- Experiment 3 (No Load Blocked Rotor Test On Single Phase Im)Document5 paginiExperiment 3 (No Load Blocked Rotor Test On Single Phase Im)Adarsh SinghÎncă nu există evaluări
- EE301 Lesson 30 AC Generators IDocument22 paginiEE301 Lesson 30 AC Generators IVijjawal GanorkarÎncă nu există evaluări
- ELE3114 Transformers Slides 2021Document30 paginiELE3114 Transformers Slides 2021Sahiil MauriceÎncă nu există evaluări
- CITEL - INDIA DAC50S 11 320 en 202310Document1 paginăCITEL - INDIA DAC50S 11 320 en 202310Mersal VjÎncă nu există evaluări
- Basic Electrical Concepts About BusDuctDocument6 paginiBasic Electrical Concepts About BusDuctAshish ThakkarÎncă nu există evaluări
- Unit7-DC MotorsDocument40 paginiUnit7-DC MotorsNAVNEET GUPTAÎncă nu există evaluări
- Topic 4 Electrical Installation (2012) StudentDocument60 paginiTopic 4 Electrical Installation (2012) StudentLuisLo0% (1)
- Tanmay Agrawal: Pre-Lab QuestionsDocument9 paginiTanmay Agrawal: Pre-Lab QuestionsTanmay Agrawal (RA2011047010093)Încă nu există evaluări
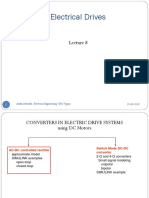
- Electrical DrivesDocument14 paginiElectrical DrivesshivamÎncă nu există evaluări
- Three Phse SycronizeDocument14 paginiThree Phse SycronizeEden HazardÎncă nu există evaluări
- 5kva Inverter Checklist - HV - ParallelDocument1 pagină5kva Inverter Checklist - HV - ParallelNeal PaxtonÎncă nu există evaluări
- What Are The Types of Potential Transformer (PT) ? Describe EachDocument7 paginiWhat Are The Types of Potential Transformer (PT) ? Describe EachFEMAE DOMANEOÎncă nu există evaluări
- Analysis of Transient Recovery Voltage On SF Circuit Breakers When Switching Unloaded 400 KV Transmission LinesDocument6 paginiAnalysis of Transient Recovery Voltage On SF Circuit Breakers When Switching Unloaded 400 KV Transmission LinesFaridahmad AziziÎncă nu există evaluări
- X-Ray Generators: Resident Physics LecturesDocument54 paginiX-Ray Generators: Resident Physics LecturesAhmed TorkyÎncă nu există evaluări
- EM-I LAB-finalDocument111 paginiEM-I LAB-finalHarimadhavareddy YenireddyÎncă nu există evaluări
- Boys 1989Document7 paginiBoys 1989iman khatibiÎncă nu există evaluări
- Unified A Approach To Power Transmission: Powfbflow Controller: ControlDocument13 paginiUnified A Approach To Power Transmission: Powfbflow Controller: Controlmass1984Încă nu există evaluări
- Lectures 3&4Document47 paginiLectures 3&4Yong Jian RongÎncă nu există evaluări
- PresentationDocument62 paginiPresentationFidel LansanganÎncă nu există evaluări
- Lecture 5Document45 paginiLecture 5Eric XVEÎncă nu există evaluări
- Product Catalogue 1501743701030817Document1 paginăProduct Catalogue 1501743701030817erode els erodeÎncă nu există evaluări
- Compressor BasicsDocument131 paginiCompressor BasicsRizki AlÎncă nu există evaluări
- Lecture DC MachinesDocument40 paginiLecture DC MachinesgeslincarlombetahÎncă nu există evaluări
- Ac Voltage Controller Circuits: Unit-8Document49 paginiAc Voltage Controller Circuits: Unit-8Naeemo IraqiÎncă nu există evaluări
- C 2800 E Course Service Manual Service Manual 121202 03p-Power DistributionDocument20 paginiC 2800 E Course Service Manual Service Manual 121202 03p-Power DistributionFreddy Humberto RinconÎncă nu există evaluări
- Practical Troubleshooting of Electrical Equipment and Control CircuitsDe la EverandPractical Troubleshooting of Electrical Equipment and Control CircuitsEvaluare: 4 din 5 stele4/5 (5)
- Passive and Discrete Circuits: Newnes Electronics Circuits Pocket Book, Volume 2De la EverandPassive and Discrete Circuits: Newnes Electronics Circuits Pocket Book, Volume 2Încă nu există evaluări
- Common Industrial Drives NotesDocument55 paginiCommon Industrial Drives NotesolexÎncă nu există evaluări
- Exam Tests: Latest Exam Questions & Answers Help You To Pass IT Exam Test EasilyDocument5 paginiExam Tests: Latest Exam Questions & Answers Help You To Pass IT Exam Test EasilyolexÎncă nu există evaluări
- FULLTEXT01Document74 paginiFULLTEXT01olexÎncă nu există evaluări
- Bite PDFDocument60 paginiBite PDFolex67% (3)
- Internship OrientationDocument23 paginiInternship OrientationolexÎncă nu există evaluări
- Modeling and Simulation of Grid Connected PV/WT Energy System Using Super-CapacitorDocument7 paginiModeling and Simulation of Grid Connected PV/WT Energy System Using Super-CapacitorolexÎncă nu există evaluări
- Dynamic Models of Car Ownership at The Household LevelDocument24 paginiDynamic Models of Car Ownership at The Household LevelolexÎncă nu există evaluări
- The Work of Leaders in A Lean Management Enterprise PDFDocument128 paginiThe Work of Leaders in A Lean Management Enterprise PDFolexÎncă nu există evaluări
- EEPC1T6ADocument2 paginiEEPC1T6AolexÎncă nu există evaluări
- 0, and - V - The Basic H BridgeDocument3 pagini0, and - V - The Basic H BridgeolexÎncă nu există evaluări
- 1212 0059 PDFDocument5 pagini1212 0059 PDFolexÎncă nu există evaluări
- Lect1 PDFDocument45 paginiLect1 PDFolexÎncă nu există evaluări
- Electrical Electronics Engineering: Sssutms SehoreDocument16 paginiElectrical Electronics Engineering: Sssutms SehoreolexÎncă nu există evaluări
- Neural NetworksDocument30 paginiNeural NetworksolexÎncă nu există evaluări
- How To Calculate Size of Solar System in India?Document10 paginiHow To Calculate Size of Solar System in India?olexÎncă nu există evaluări
- Book1 PDFDocument338 paginiBook1 PDFVijay Sai ChandÎncă nu există evaluări
- Key - SLD - R2Document1 paginăKey - SLD - R2Satya Narayana BandaruÎncă nu există evaluări
- MTW-5574-DC Charger DrawingDocument14 paginiMTW-5574-DC Charger DrawingCuong NguyenÎncă nu există evaluări
- Power Electronics Question BankDocument14 paginiPower Electronics Question BankHitesh GoyalÎncă nu există evaluări
- Lecture 2: Switches, Rectifiers and Generators: SP.764, Practical Electronics Dr. James A. BalesDocument5 paginiLecture 2: Switches, Rectifiers and Generators: SP.764, Practical Electronics Dr. James A. BalesFadhilaÎncă nu există evaluări
- Chapter I, II, III, IV PDFDocument84 paginiChapter I, II, III, IV PDFAsmaÎncă nu există evaluări
- 1vap701071 DB - PSH 993Document2 pagini1vap701071 DB - PSH 993Bhawana SahaniÎncă nu există evaluări
- Ee123 Final Examination 13WDocument6 paginiEe123 Final Examination 13WJohn evergreenÎncă nu există evaluări
- The Research On Special Electronic Power TransformDocument10 paginiThe Research On Special Electronic Power TransformAnshul GargÎncă nu există evaluări
- PE Lecture No.05Document7 paginiPE Lecture No.05islammuddinÎncă nu există evaluări
- Girma Moges PDFDocument117 paginiGirma Moges PDFmengistu AddisÎncă nu există evaluări
- PQ StacomDocument2 paginiPQ StacomHector BarroetaÎncă nu există evaluări
- DVR Project Report PDFDocument38 paginiDVR Project Report PDFabhishekÎncă nu există evaluări
- PWM Inverters Using Split-Wound Coupled Inductors PDFDocument9 paginiPWM Inverters Using Split-Wound Coupled Inductors PDFYaraÎncă nu există evaluări
- Electro-Motion Devices: Lecture 6-Power Transformer - 2Document11 paginiElectro-Motion Devices: Lecture 6-Power Transformer - 2Junaid KhattakÎncă nu există evaluări
- Galvanic Isolation in UPSDocument2 paginiGalvanic Isolation in UPSTerence WoodÎncă nu există evaluări
- 110 V To 310 V Converter Circuit - Homemade Circuit ProjectsDocument5 pagini110 V To 310 V Converter Circuit - Homemade Circuit ProjectsK. RAJA SEKARÎncă nu există evaluări
- Bab IiiDocument18 paginiBab IiiNugroho Agung DarmantoÎncă nu există evaluări
- HL 972Document4 paginiHL 972Henri GaspardÎncă nu există evaluări
- Strategy Competition and Sustainability-Danfoss Power ElectronicsDocument33 paginiStrategy Competition and Sustainability-Danfoss Power ElectronicsMustapha El HajjÎncă nu există evaluări
- Thyristor Controlled Voltage Regulators: Working Group B4.35Document70 paginiThyristor Controlled Voltage Regulators: Working Group B4.35cryss_89Încă nu există evaluări
- BT169Document4 paginiBT169ketab_doostÎncă nu există evaluări
- Prof DR Johann W Kolar PDFDocument82 paginiProf DR Johann W Kolar PDFaswardiÎncă nu există evaluări
- 2008 A Review On Distributed Energy Resources and MicroGrid PDFDocument12 pagini2008 A Review On Distributed Energy Resources and MicroGrid PDFbdsrlÎncă nu există evaluări
- Especificacio - N de Productos C1000S, C800S, y C600S de 5, 4, y 3 Bahi - As PDFDocument15 paginiEspecificacio - N de Productos C1000S, C800S, y C600S de 5, 4, y 3 Bahi - As PDFEduin Ferney Moreno MoraÎncă nu există evaluări
- Dr. Senad HuseinbegovicDocument4 paginiDr. Senad HuseinbegovicTheLostKidTutorialsHDÎncă nu există evaluări
- DET40073 - Topic 2cDocument26 paginiDET40073 - Topic 2cKuhaanProÎncă nu există evaluări
- Digital Control of Buck Converter Using Arduino and 8051 Micro-ControllerDocument8 paginiDigital Control of Buck Converter Using Arduino and 8051 Micro-ControllerIJAR JOURNALÎncă nu există evaluări
- High Voltage Engineering (EEE-491) : Course Teacher: Fahim Mahmud Lecturer Department of EEE, CUETDocument17 paginiHigh Voltage Engineering (EEE-491) : Course Teacher: Fahim Mahmud Lecturer Department of EEE, CUETMD. MAHADI HASAN SAJIB 1602124Încă nu există evaluări
- 6high Power Full-Bridge DC-DC Converter Using A Center-Tapped Transformer and A Full-Wave Type Rectifier PDFDocument12 pagini6high Power Full-Bridge DC-DC Converter Using A Center-Tapped Transformer and A Full-Wave Type Rectifier PDFmajidÎncă nu există evaluări