S-ar putea să vă placă și
- 8051 Lab Stepper Motor InterfacingDocument5 pagini8051 Lab Stepper Motor InterfacingGirish ChapleÎncă nu există evaluări
- Digital Power Electronics and ApplicationsDe la EverandDigital Power Electronics and ApplicationsEvaluare: 3.5 din 5 stele3.5/5 (3)
- MicroDocument11 paginiMicroZac AndersonÎncă nu există evaluări
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkDe la EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkÎncă nu există evaluări
- Modelare Si ControlDocument4 paginiModelare Si ControlDobai SzilardÎncă nu există evaluări
- Variable Speed AC Drives with Inverter Output FiltersDe la EverandVariable Speed AC Drives with Inverter Output FiltersÎncă nu există evaluări
- Lab23 PDFDocument3 paginiLab23 PDFInnocent ArnavÎncă nu există evaluări
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlDe la EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlEvaluare: 5 din 5 stele5/5 (1)
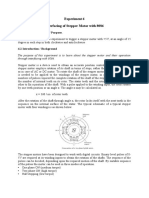
- Experiment 6 Interfacing of Stepper Motor With 8086: 6.1 Aim(s) / Objective(s) / PurposeDocument4 paginiExperiment 6 Interfacing of Stepper Motor With 8086: 6.1 Aim(s) / Objective(s) / Purposepraveenembd1Încă nu există evaluări
- Experiment - 9 - Stepper MotorDocument5 paginiExperiment - 9 - Stepper MotorABHISHEK SHARMAÎncă nu există evaluări
- Unit8-RK 3Document27 paginiUnit8-RK 3sbaÎncă nu există evaluări
- DCM Lab Manual - 0 PDFDocument45 paginiDCM Lab Manual - 0 PDFVenkata HemanthÎncă nu există evaluări
- Fig. 12.1 - Movement of Rotor For Current in Different WindingsDocument6 paginiFig. 12.1 - Movement of Rotor For Current in Different WindingsBala SubramanianÎncă nu există evaluări
- Stepper MotorDocument9 paginiStepper MotorHasan Mahmood100% (1)
- (212142518) Stepper Motor Control Using MicrocontrollerDocument4 pagini(212142518) Stepper Motor Control Using MicrocontrollerraghavthakurjiÎncă nu există evaluări
- Electrical-Engineering Engineering Microcontroller Interfacing-And-Applications NotesDocument27 paginiElectrical-Engineering Engineering Microcontroller Interfacing-And-Applications NotesUtkarsh Krishn SG21547Încă nu există evaluări
- Project of MAA 1Document21 paginiProject of MAA 1Pranil KambleÎncă nu există evaluări
- Solar Powered Speed Control of Brushless DC MotorDocument7 paginiSolar Powered Speed Control of Brushless DC MotorIJRASETPublicationsÎncă nu există evaluări
- Microcontroller Based Stepper Motor Drive For Variable A.C Power SupplyDocument9 paginiMicrocontroller Based Stepper Motor Drive For Variable A.C Power SupplysanabelÎncă nu există evaluări
- The 8051 Microcontroller and Embedded Systems: Motor Control: Relay, PWM, DC and Stepper MotorsDocument51 paginiThe 8051 Microcontroller and Embedded Systems: Motor Control: Relay, PWM, DC and Stepper MotorsAmAnDeepSingh100% (1)
- Ch6 - A Stepper MotorDocument5 paginiCh6 - A Stepper MotorEdward Conal100% (2)
- Stepper MotorDocument6 paginiStepper MotorMohamed Irshad AboubackerÎncă nu există evaluări
- Rajshahi University of Engineering &technologyDocument4 paginiRajshahi University of Engineering &technologyদিব্যজয় পালÎncă nu există evaluări
- Aditya Lab 12Document19 paginiAditya Lab 12Sujeet PawarÎncă nu există evaluări
- Stepper Motor: Free !Document2 paginiStepper Motor: Free !carlos augusto do carmo braia100% (1)
- Emelyanov 2020Document7 paginiEmelyanov 2020Mai Putra MuhammadiyahÎncă nu există evaluări
- Stepper MotorDocument28 paginiStepper MotorK PranavÎncă nu există evaluări
- Micro-Stepping Drive For Stepping Motor: Design and ImplementationDocument6 paginiMicro-Stepping Drive For Stepping Motor: Design and ImplementationVishal MakodeÎncă nu există evaluări
- Experiment 8 Synchronous Motor - Part IDocument13 paginiExperiment 8 Synchronous Motor - Part IRoanaqul Islam PracchoÎncă nu există evaluări
- DC Motor Control Using 8085Document48 paginiDC Motor Control Using 8085Bhavya Wadhwa100% (3)
- ECEN 2270 CU Boulder 2013, Electronics Design Lab, Lab2, WIPDocument8 paginiECEN 2270 CU Boulder 2013, Electronics Design Lab, Lab2, WIPNunjaÎncă nu există evaluări
- PLC Stepper Motor ControllerDocument12 paginiPLC Stepper Motor ControllerSibtain Ul Hassan100% (1)
- .Archlab Task 12 (Control Stepper Motor Direction)Document4 pagini.Archlab Task 12 (Control Stepper Motor Direction)W.S EntertainmentÎncă nu există evaluări
- Lab 4 - DC Motor Tachometer: ObjectiveDocument8 paginiLab 4 - DC Motor Tachometer: Objectiveswagato deyÎncă nu există evaluări
- Direct Torque Control For Induction Motor Using Intelligent Artificial Neural Network TechniqueDocument7 paginiDirect Torque Control For Induction Motor Using Intelligent Artificial Neural Network TechniqueInternational Journal of Application or Innovation in Engineering & ManagementÎncă nu există evaluări
- LAB Report 10Document14 paginiLAB Report 10razakhan5114Încă nu există evaluări
- Driver Motor BrushlesDocument48 paginiDriver Motor BrushlesGONAJ2008Încă nu există evaluări
- Micro-Controller Based Function Generator and PC OscilloscopeDocument35 paginiMicro-Controller Based Function Generator and PC OscilloscopeJatinÎncă nu există evaluări
- Bahçeşehir University: 111equation Chapter 1 Section 1212equation Chapter 2 Section 1Document10 paginiBahçeşehir University: 111equation Chapter 1 Section 1212equation Chapter 2 Section 1Wael M. AbulafiÎncă nu există evaluări
- KKKL3293 - Sem 1 20212022 - Lab 4 - Stepper MotorDocument7 paginiKKKL3293 - Sem 1 20212022 - Lab 4 - Stepper MotorPRASAATH A/L BALAKRISHNANÎncă nu există evaluări
- Interfacing Stepper Motor Using MicroControllerDocument4 paginiInterfacing Stepper Motor Using MicroControllershahzad jalbani100% (1)
- Report Interfacing of Stepper Motor With Microcontroller 8051Document14 paginiReport Interfacing of Stepper Motor With Microcontroller 8051Uday A Korat50% (4)
- Stpper MotorDocument18 paginiStpper Motors.jyotshna100% (1)
- Experiment 11 MachineDocument4 paginiExperiment 11 MachineMian TauseefÎncă nu există evaluări
- LAB 15 Interfacing A Stepper Motor To The 8051Document3 paginiLAB 15 Interfacing A Stepper Motor To The 8051M Rameez Ur RehmanÎncă nu există evaluări
- Answer: Control System (Unit 1)Document18 paginiAnswer: Control System (Unit 1)Ajeet Kumar shuklaÎncă nu există evaluări
- Lab Report 2Document17 paginiLab Report 2EvaÎncă nu există evaluări
- Qs & As Class I+IIDocument9 paginiQs & As Class I+IIphyoÎncă nu există evaluări
- Microprocessor and Microcontroller Lab: Experiments PerformedDocument51 paginiMicroprocessor and Microcontroller Lab: Experiments PerformedadityaÎncă nu există evaluări
- Stepper MotorDocument9 paginiStepper Motorabdoo773719637Încă nu există evaluări
- Step 1: Specification, Motor DriverDocument8 paginiStep 1: Specification, Motor DriverAfriÎncă nu există evaluări
- Im 8Document7 paginiIm 8maheswaranÎncă nu există evaluări
- Stepper Motor ControlDocument5 paginiStepper Motor ControlKumar R Ranjan86% (7)
- Power Electronics Lab ManualDocument51 paginiPower Electronics Lab ManualAnand ShankarÎncă nu există evaluări
- Position and Speed Control of BLDC Motor Using Hall Sensor IJERTCONV3IS32015Document3 paginiPosition and Speed Control of BLDC Motor Using Hall Sensor IJERTCONV3IS32015DONE AND DUSTEDÎncă nu există evaluări
- Stepper Motor Control Using The PIC16F684Document12 paginiStepper Motor Control Using The PIC16F684edward_conzaÎncă nu există evaluări
- I. Summary The Main Principle of The Project and Its Circuits Is To Rotate The Stepper Motor Step Wise at ADocument9 paginiI. Summary The Main Principle of The Project and Its Circuits Is To Rotate The Stepper Motor Step Wise at ADr. RAMESH KUMAR. SÎncă nu există evaluări
- Lab 6 ReportDocument27 paginiLab 6 ReportIzzat AzmanÎncă nu există evaluări
- AVR194 Brushless DC Motor Control Using ATMega32M1Document16 paginiAVR194 Brushless DC Motor Control Using ATMega32M1u776287Încă nu există evaluări
- Department of Computer Science & Engineering: A Webinar On 20 August @11amDocument1 paginăDepartment of Computer Science & Engineering: A Webinar On 20 August @11amsharadaÎncă nu există evaluări
- Termwork 2Document14 paginiTermwork 2sharadaÎncă nu există evaluări
- Traffic ControllerDocument18 paginiTraffic ControllersharadaÎncă nu există evaluări
- ExternalInterrupt PPTDocument28 paginiExternalInterrupt PPTsharadaÎncă nu există evaluări
- Elevator InterfacingDocument25 paginiElevator Interfacingsharada100% (1)
- DACDocument14 paginiDACsharadaÎncă nu există evaluări
- ADCDocument7 paginiADCsharadaÎncă nu există evaluări
- Maruti FinalDocument23 paginiMaruti FinalYash MangeÎncă nu există evaluări
- 9.LearnEnglish Writing A2 Instructions For A Colleague PDFDocument5 pagini9.LearnEnglish Writing A2 Instructions For A Colleague PDFوديع القباطيÎncă nu există evaluări
- Akebono NVH White PaperDocument4 paginiAkebono NVH White Paperapi-3702571100% (1)
- Set B Cluster 3 (Final) (Aug102015)Document4 paginiSet B Cluster 3 (Final) (Aug102015)Kuo Sarong100% (1)
- Intern JanataDocument59 paginiIntern JanataKhairul IslamÎncă nu există evaluări
- Everyday Life - B1 - ShoppingDocument7 paginiEveryday Life - B1 - ShoppingAmi BarnesÎncă nu există evaluări
- Pressuremeter TestDocument33 paginiPressuremeter TestHo100% (1)
- SPE-171076-MS The Role of Asphaltenes in Emulsion Formation For Steam Assisted Gravity Drainage (SAGD) and Expanding Solvent - SAGD (ES-SAGD)Document14 paginiSPE-171076-MS The Role of Asphaltenes in Emulsion Formation For Steam Assisted Gravity Drainage (SAGD) and Expanding Solvent - SAGD (ES-SAGD)Daniel FelipeÎncă nu există evaluări
- Roundtracer Flash En-Us Final 2021-06-09Document106 paginiRoundtracer Flash En-Us Final 2021-06-09Kawee BoonsuwanÎncă nu există evaluări
- E. What Was The Chinese POW Death Rate in WW2 and The Second Sino-Japanese WarDocument3 paginiE. What Was The Chinese POW Death Rate in WW2 and The Second Sino-Japanese WarPamela SantosÎncă nu există evaluări
- WestIntroToSSB PDFDocument100 paginiWestIntroToSSB PDFnaval_05Încă nu există evaluări
- Axis Bank - Group 4Document34 paginiAxis Bank - Group 4Deep Ghose DastidarÎncă nu există evaluări
- User Guide: Echolife Hg520C Home GatewayDocument25 paginiUser Guide: Echolife Hg520C Home Gatewayluis PavilaÎncă nu există evaluări
- Consider Typical Robots Consider Typical RobotsDocument16 paginiConsider Typical Robots Consider Typical RobotsOthers ATBP.Încă nu există evaluări
- Pex 03 02Document5 paginiPex 03 02aexillis0% (1)
- Electrochemistry DPP-1Document2 paginiElectrochemistry DPP-1tarunÎncă nu există evaluări
- Opening StrategyDocument6 paginiOpening StrategyashrafsekalyÎncă nu există evaluări
- Sample Questions: 1 Midterm PracticeDocument6 paginiSample Questions: 1 Midterm PracticeValdimiro BelezaÎncă nu există evaluări
- Four Quartets: T.S. EliotDocument32 paginiFour Quartets: T.S. Eliotschwarzgerat00000100% (1)
- Unit One Mathematical EconomicsDocument15 paginiUnit One Mathematical EconomicsSitra AbduÎncă nu există evaluări
- Migloo's Day Info SheetDocument4 paginiMigloo's Day Info SheetCandlewick PressÎncă nu există evaluări
- Ajol File Journals - 404 - Articles - 66996 - Submission - Proof - 66996 4813 136433 1 10 20110608Document12 paginiAjol File Journals - 404 - Articles - 66996 - Submission - Proof - 66996 4813 136433 1 10 20110608Lovely Joy Hatamosa Verdon-DielÎncă nu există evaluări
- Computer ArchitectureDocument46 paginiComputer Architecturejaime_parada3097100% (2)
- Stock Trak AssignmentDocument4 paginiStock Trak AssignmentPat ParisiÎncă nu există evaluări
- Beg 2018 XXDocument42 paginiBeg 2018 XXFranz Gustavo Vargas MamaniÎncă nu există evaluări
- Linberg V MakatiDocument2 paginiLinberg V MakatiChimney sweepÎncă nu există evaluări
- Drinking Water Treatment Unit Scheme Ver 2Document31 paginiDrinking Water Treatment Unit Scheme Ver 2josephsedÎncă nu există evaluări
- Effect of Water On Quality and Preservation of FoodDocument10 paginiEffect of Water On Quality and Preservation of FoodrupinisinnanÎncă nu există evaluări
- Yusof Ishak Secondary School Humanities Study Tour Ho Chi Minh City, VietnamDocument19 paginiYusof Ishak Secondary School Humanities Study Tour Ho Chi Minh City, Vietnamadamant751Încă nu există evaluări
- 2.fundamentals of MappingDocument5 pagini2.fundamentals of MappingB S Praveen BspÎncă nu există evaluări