S-ar putea să vă placă și
- InterpenetrationDocument105 paginiInterpenetrationJohn TauloÎncă nu există evaluări
- Lecture 6Document28 paginiLecture 6Divyanshu JainÎncă nu există evaluări
- Lecture 6Document36 paginiLecture 6Divyanshu JainÎncă nu există evaluări
- Engineering Curves: Part-I (Conic Sections)Document21 paginiEngineering Curves: Part-I (Conic Sections)Piyush RamawatÎncă nu există evaluări
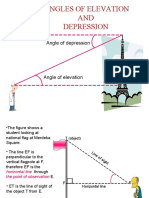
- Angles of Elevation and Depression ProblemsDocument21 paginiAngles of Elevation and Depression ProblemsPau BlasÎncă nu există evaluări
- General Physics III Part A: Electricity: Gauss' LawDocument35 paginiGeneral Physics III Part A: Electricity: Gauss' LawNhựt Phi PhanÎncă nu există evaluări
- NazirDocument16 paginiNazirAbu SalmanÎncă nu există evaluări
- Ch 10Document44 paginiCh 10luismasantos991Încă nu există evaluări
- Vector Analysis (Continued) : EE 2513: Electromagnetic Fields and WavesDocument10 paginiVector Analysis (Continued) : EE 2513: Electromagnetic Fields and WavesShizaa ZahidÎncă nu există evaluări
- Adobe Scan 14 Dec 2022Document2 paginiAdobe Scan 14 Dec 2022Dipsa SonaÎncă nu există evaluări
- Knight27 Gauss LectDocument14 paginiKnight27 Gauss LectLin Xian XingÎncă nu există evaluări
- Gauss's Law IDocument3 paginiGauss's Law IRana MukherjeeÎncă nu există evaluări
- Electric Field FluxDocument19 paginiElectric Field FluxroseÎncă nu există evaluări
- Transcat T R: Electrical Power MeasurementsDocument4 paginiTranscat T R: Electrical Power MeasurementsSamantha AshmanÎncă nu există evaluări
- Today's Agenda: Announcements. Electric Field LinesDocument19 paginiToday's Agenda: Announcements. Electric Field LinesMustafa RamadanÎncă nu există evaluări
- Sections-Dev-Intersection of Solids-KsrDocument8 paginiSections-Dev-Intersection of Solids-KsrK S ChalapathiÎncă nu există evaluări
- Chapter 12 - P-N JunctionDocument69 paginiChapter 12 - P-N JunctionShelly RismawatiÎncă nu există evaluări
- AC Fundamentals Required Reading in Text Book: Chapter 4 - Steady State Analysis of Sinusoidal ExcitationDocument7 paginiAC Fundamentals Required Reading in Text Book: Chapter 4 - Steady State Analysis of Sinusoidal ExcitationSteve ThomasÎncă nu există evaluări
- Section of SolidsDocument22 paginiSection of SolidsJijo G KumarÎncă nu există evaluări
- Circuit CH9Document24 paginiCircuit CH9MMÎncă nu există evaluări
- Lec 3 - E Field UpdatedDocument31 paginiLec 3 - E Field UpdatedMuhammad Matloob Uz ZamanÎncă nu există evaluări
- Focal Length of Convex LensDocument5 paginiFocal Length of Convex LensHey AnuragÎncă nu există evaluări
- On The Desargues' Involution TheoremDocument11 paginiOn The Desargues' Involution TheoremStefy Stefan75% (4)
- Experiment # 1Document3 paginiExperiment # 1Mahnoor SiddiqiÎncă nu există evaluări
- L1 - Alternating Current 16th AugDocument54 paginiL1 - Alternating Current 16th AugPranav DudhalÎncă nu există evaluări
- A Wavefront Is The Locus of Points (Wavelets) Having The Same Phase of Oscillations. WavefrontDocument22 paginiA Wavefront Is The Locus of Points (Wavelets) Having The Same Phase of Oscillations. WavefrontJinshy VinodÎncă nu există evaluări
- Developing surfaces of solidsDocument9 paginiDeveloping surfaces of solidsShivaniÎncă nu există evaluări
- Country's Best Online Test PlatformDocument30 paginiCountry's Best Online Test PlatformSanjana DuttaÎncă nu există evaluări
- Ch-10 Wave_Optics_1Document16 paginiCh-10 Wave_Optics_1examkv1cuttackÎncă nu există evaluări
- Read The Instructions On The Reverse: 1-Using The Set Squares: Triangles and ParallelsDocument6 paginiRead The Instructions On The Reverse: 1-Using The Set Squares: Triangles and ParallelsMaríaÎncă nu există evaluări
- SemiconductorDocument69 paginiSemiconductorSatheshÎncă nu există evaluări
- Lecture 4 - Resultant of Forces - Part 2Document24 paginiLecture 4 - Resultant of Forces - Part 2Marjorie Jean AnogÎncă nu există evaluări
- Electro Magnetic Induction Quick RevisionDocument8 paginiElectro Magnetic Induction Quick RevisionRockstar North ProductionÎncă nu există evaluări
- RA01 Force On Wire - Amit SharmaDocument26 paginiRA01 Force On Wire - Amit SharmaPadam MantryÎncă nu există evaluări
- SECTIONS OF SOLIDSDocument22 paginiSECTIONS OF SOLIDSnikshep s rajÎncă nu există evaluări
- FME Unit 3 Part 2Document29 paginiFME Unit 3 Part 2Jayanth TurimellaÎncă nu există evaluări
- Gauss' law and electric flux through surfacesDocument28 paginiGauss' law and electric flux through surfacesSumaya Akter Ruhi 2022610642Încă nu există evaluări
- Chapter - 2: Engineering CurvesDocument118 paginiChapter - 2: Engineering CurvesSrikanth SriÎncă nu există evaluări
- Area 1 ProbDocument7 paginiArea 1 ProbKrisher DhayÎncă nu există evaluări
- E = 200√2 sin (100t) Vω = 100 rad/sXc = 1/(ωC) = 1/(100×1×10-6) = 2 ΩI = E/Z = 200√2/(√(2)2 + (55)2) = 10 mAThe reading of the ammeter is 10 mADocument63 paginiE = 200√2 sin (100t) Vω = 100 rad/sXc = 1/(ωC) = 1/(100×1×10-6) = 2 ΩI = E/Z = 200√2/(√(2)2 + (55)2) = 10 mAThe reading of the ammeter is 10 mAAjit TripathyÎncă nu există evaluări
- Complex Exponential SignalsDocument44 paginiComplex Exponential SignalsÖmer Yağız ÜskesÎncă nu există evaluări
- 10 MathsDocument97 pagini10 MathsAjeet SonyÎncă nu există evaluări
- Wave Optics WordDocument16 paginiWave Optics WordsouravÎncă nu există evaluări
- Alternating CurrentDocument14 paginiAlternating CurrentHimanshu PraneethÎncă nu există evaluări
- Physics2A CheatSheetDocument2 paginiPhysics2A CheatSheetharmonyÎncă nu există evaluări
- U1 Worksheets U EdDocument4 paginiU1 Worksheets U EdRamón RealzadoÎncă nu există evaluări
- Sheet Conic Section BDocument117 paginiSheet Conic Section BAbhinav ShuklaÎncă nu există evaluări
- Surveying 3 PrelimsDocument4 paginiSurveying 3 PrelimsKing BangngayÎncă nu există evaluări
- XII Wave OpticsDocument16 paginiXII Wave OpticsMeenal BansalÎncă nu există evaluări
- Waves Optics 1Document16 paginiWaves Optics 1WarishaÎncă nu există evaluări
- 13 HyperbolaDocument30 pagini13 Hyperbolatusharfiitjee80Încă nu există evaluări
- Wave Optics 1Document16 paginiWave Optics 1shauryaÎncă nu există evaluări
- Electric FieldDocument36 paginiElectric Fieldzshia shang limÎncă nu există evaluări
- Gauss' Law and Electric FluxDocument34 paginiGauss' Law and Electric FluxViệt NguyễnÎncă nu există evaluări
- 1.4 Ellipse - General Method PDFDocument1 pagină1.4 Ellipse - General Method PDFNarendra ChavdaÎncă nu există evaluări
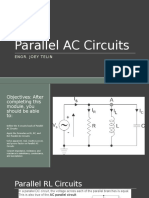
- Parallel AC Circuits SPLPDocument47 paginiParallel AC Circuits SPLPJoey TelinÎncă nu există evaluări
- (L1) - (JLD 2.0) - AC - 24th SeptDocument48 pagini(L1) - (JLD 2.0) - AC - 24th Septsouradeep ghoshÎncă nu există evaluări
- Wave Optics - I: Created by C. Mani, Principal, K V No.1, AFS, Jalahalli West, BangaloreDocument16 paginiWave Optics - I: Created by C. Mani, Principal, K V No.1, AFS, Jalahalli West, BangaloreKashyap PatelÎncă nu există evaluări
- The Equidistribution Theory of Holomorphic Curves. (AM-64), Volume 64De la EverandThe Equidistribution Theory of Holomorphic Curves. (AM-64), Volume 64Încă nu există evaluări
- WINSEM2019-20 EEE2005 ETH VL2019205002607 Reference Material I 27-Jan-2020 Analog FiltersDocument8 paginiWINSEM2019-20 EEE2005 ETH VL2019205002607 Reference Material I 27-Jan-2020 Analog FiltersdhoniÎncă nu există evaluări
- Unit 3 - DC - MotorDocument39 paginiUnit 3 - DC - MotordhoniÎncă nu există evaluări
- Circle Diagram Performance AnalysisDocument26 paginiCircle Diagram Performance AnalysisdhoniÎncă nu există evaluări
- Double Field Revolving Theory ExplainedDocument5 paginiDouble Field Revolving Theory ExplaineddhoniÎncă nu există evaluări
- Excitation - Magnetic System: - Singly Excited System - Doubly Excited SystemDocument12 paginiExcitation - Magnetic System: - Singly Excited System - Doubly Excited SystemdhoniÎncă nu există evaluări
- WINSEM2019-20 EEE2005 ETH VL2019205002607 Reference Material I 17-Feb-2020 IIR Filter ApplicationsDocument7 paginiWINSEM2019-20 EEE2005 ETH VL2019205002607 Reference Material I 17-Feb-2020 IIR Filter ApplicationsdhoniÎncă nu există evaluări
- WINSEM2019-20 EEE2005 ETH VL2019205002607 Reference Material I 19-Feb-2020 Frequency TransformationDocument4 paginiWINSEM2019-20 EEE2005 ETH VL2019205002607 Reference Material I 19-Feb-2020 Frequency TransformationdhoniÎncă nu există evaluări
- WINSEM2019-20 EEE2005 ETH VL2019205002607 Reference Material I 10-Feb-2020 IIR - Bilinear Transformation ExamplesDocument9 paginiWINSEM2019-20 EEE2005 ETH VL2019205002607 Reference Material I 10-Feb-2020 IIR - Bilinear Transformation ExamplesdhoniÎncă nu există evaluări
- WINSEM2019-20 EEE2005 ETH VL2019205002607 Reference Material I 10-Feb-2020 IIR - Bilinear Transformation ExamplesDocument9 paginiWINSEM2019-20 EEE2005 ETH VL2019205002607 Reference Material I 10-Feb-2020 IIR - Bilinear Transformation ExamplesdhoniÎncă nu există evaluări
- WINSEM2018-19 - CSE1002 - LO - SJT120 - VL2018195003969 - Reference Material I - Solution - Print All Permutations of A Given String Using PointersDocument2 paginiWINSEM2018-19 - CSE1002 - LO - SJT120 - VL2018195003969 - Reference Material I - Solution - Print All Permutations of A Given String Using PointersdhoniÎncă nu există evaluări
- WINSEM2019-20 EEE2005 ETH VL2019205002607 Reference Material I 03-Feb-2020 DESIGN OF IIR FILTER PDFDocument53 paginiWINSEM2019-20 EEE2005 ETH VL2019205002607 Reference Material I 03-Feb-2020 DESIGN OF IIR FILTER PDFdhoniÎncă nu există evaluări
- WINSEM2019-20 EEE1008 ETH VL2019205002298 Reference Material I 21-Feb-2020 PacemakersDocument31 paginiWINSEM2019-20 EEE1008 ETH VL2019205002298 Reference Material I 21-Feb-2020 PacemakersdhoniÎncă nu există evaluări
- BIO-MEDICAL INSTRUMENTATION SYLLABUSDocument2 paginiBIO-MEDICAL INSTRUMENTATION SYLLABUSdhoniÎncă nu există evaluări
- InTech-Principles of External Defibrillators PDFDocument24 paginiInTech-Principles of External Defibrillators PDFdhoniÎncă nu există evaluări
- WINSEM2018-19 - CSE1002 - LO - SJT120 - VL2018195003969 - Reference Material II - Practice Problems On Pointers and DMADocument3 paginiWINSEM2018-19 - CSE1002 - LO - SJT120 - VL2018195003969 - Reference Material II - Practice Problems On Pointers and DMAdhoniÎncă nu există evaluări
- WINSEM2018-19 - CSE1002 - LO - SJT120 - VL2018195003969 - Reference Material II - Practice Problems On Pointers and DMADocument3 paginiWINSEM2018-19 - CSE1002 - LO - SJT120 - VL2018195003969 - Reference Material II - Practice Problems On Pointers and DMAdhoniÎncă nu există evaluări
- WINSEM2018-19 - CSE1002 - LO - SJT120 - VL2018195003969 - Reference Material II - Practice Problems in CDocument1 paginăWINSEM2018-19 - CSE1002 - LO - SJT120 - VL2018195003969 - Reference Material II - Practice Problems in CdhoniÎncă nu există evaluări
- Power Systems Guides Book by CL Wadhwa PDFDocument3 paginiPower Systems Guides Book by CL Wadhwa PDFAnkit Kumar0% (4)
- WINSEM2019-20 CSE2003 EPJ VL2019205001834 Review I Schedule Lab 1 Study Materials For ArrayDocument9 paginiWINSEM2019-20 CSE2003 EPJ VL2019205001834 Review I Schedule Lab 1 Study Materials For ArraydhoniÎncă nu există evaluări
- WINSEM2019-20 STS2102 SS VL2019205000241 Reference Material I 20-Dec-2019 B.Tech II Yr 4th Sem Writing SkillsDocument5 paginiWINSEM2019-20 STS2102 SS VL2019205000241 Reference Material I 20-Dec-2019 B.Tech II Yr 4th Sem Writing SkillsdhoniÎncă nu există evaluări
- WINSEM2019-20 EEE2005 ETH VL2019205002607 Reference Material I 04-Dec-2019 Int-Dsp-1 PDFDocument51 paginiWINSEM2019-20 EEE2005 ETH VL2019205002607 Reference Material I 04-Dec-2019 Int-Dsp-1 PDFAlfredÎncă nu există evaluări
- Operational Amplifiers and Linear Integra 59adfcda1723ddc0c501612bDocument2 paginiOperational Amplifiers and Linear Integra 59adfcda1723ddc0c501612bpoornaÎncă nu există evaluări
- Medical Image Forgery Detection For Smart Healthcare: IEEE Communications Magazine April 2018Document6 paginiMedical Image Forgery Detection For Smart Healthcare: IEEE Communications Magazine April 2018dhoniÎncă nu există evaluări
- Answers To Review QuestionsDocument17 paginiAnswers To Review Questionsdhoni0% (1)
- BIO-MEDICAL INSTRUMENTATION SYLLABUSDocument2 paginiBIO-MEDICAL INSTRUMENTATION SYLLABUSdhoniÎncă nu există evaluări
- TermsDocument1 paginăTermsdhoniÎncă nu există evaluări
- WINSEM2019-20 EEE2005 ETH VL2019205002607 Reference Material I 17-Feb-2020 IIR Filter ApplicationsDocument7 paginiWINSEM2019-20 EEE2005 ETH VL2019205002607 Reference Material I 17-Feb-2020 IIR Filter ApplicationsdhoniÎncă nu există evaluări
- WINSEM2019-20 EEE2005 ETH VL2019205002607 Reference Material I 19-Feb-2020 Frequency TransformationDocument4 paginiWINSEM2019-20 EEE2005 ETH VL2019205002607 Reference Material I 19-Feb-2020 Frequency TransformationdhoniÎncă nu există evaluări
- WINSEM2019-20 EEE2005 ETH VL2019205002607 Reference Material I 10-Feb-2020 IIR - Bilinear Transformation ExamplesDocument9 paginiWINSEM2019-20 EEE2005 ETH VL2019205002607 Reference Material I 10-Feb-2020 IIR - Bilinear Transformation ExamplesdhoniÎncă nu există evaluări
- Pagination script tutorial for PHP MySQL programmersDocument4 paginiPagination script tutorial for PHP MySQL programmersThomas ChinyamaÎncă nu există evaluări
- Microstructures and Mechanical Properties of Ultrafine Grained Pure Ti Produced by Severe Plastic DeformationDocument10 paginiMicrostructures and Mechanical Properties of Ultrafine Grained Pure Ti Produced by Severe Plastic Deformationsoni180Încă nu există evaluări
- DC Motor Direction Control ReportDocument6 paginiDC Motor Direction Control ReportEngr Farhanullah SarkiÎncă nu există evaluări
- CSE Catalog - IndiaDocument67 paginiCSE Catalog - IndiaDheeraj SivadasÎncă nu există evaluări
- Digital Logic and Microprocessor Design With Interfacing 2nd Edition Hwang Solutions ManualDocument27 paginiDigital Logic and Microprocessor Design With Interfacing 2nd Edition Hwang Solutions Manualdacdonaldnxv1zq100% (27)
- PD 957 AND BP 220 HOUSING DESIGN STANDARDSDocument5 paginiPD 957 AND BP 220 HOUSING DESIGN STANDARDSGeraldine F. CalubÎncă nu există evaluări
- Indus Water Treaty & Emerging Water IssuesDocument24 paginiIndus Water Treaty & Emerging Water Issuesu1umarÎncă nu există evaluări
- Primary Mathematics Book 5Document87 paginiPrimary Mathematics Book 5joseph kunikina0% (1)
- Project Hydraulics and HydrologyDocument17 paginiProject Hydraulics and HydrologyEiyra NadiaÎncă nu există evaluări
- The Future of Smart Cities and RegionsDocument20 paginiThe Future of Smart Cities and RegionsChristianÎncă nu există evaluări
- Suparco+ KRL Test Ques For Electrical EngrzDocument5 paginiSuparco+ KRL Test Ques For Electrical Engrzمحمد فصیح آفتابÎncă nu există evaluări
- RefrigerationDocument11 paginiRefrigerationBroAmirÎncă nu există evaluări
- Counter List HuaweiDocument14 paginiCounter List Huaweiwedewe02Încă nu există evaluări
- PLCDocument16 paginiPLCMohit Kinger100% (1)
- An70983 001-70983Document24 paginiAn70983 001-70983अमरेश झाÎncă nu există evaluări
- Numerical Ability - Data Interpretation 3: 25 QuestionsDocument6 paginiNumerical Ability - Data Interpretation 3: 25 QuestionsAvishek01Încă nu există evaluări
- PJ1117CM-2 5VDocument6 paginiPJ1117CM-2 5VАлексей ГомоновÎncă nu există evaluări
- Dealer FeedbackDocument3 paginiDealer FeedbackTarun BhatiÎncă nu există evaluări
- ICT PresentationDocument13 paginiICT PresentationThe Leo LoverÎncă nu există evaluări
- Chapter 11B: Survey of Database SystemsDocument17 paginiChapter 11B: Survey of Database SystemsMurtaza MoizÎncă nu există evaluări
- Eurox Cross Flow ScrubberDocument8 paginiEurox Cross Flow ScrubberRobin LayogÎncă nu există evaluări
- Software Hardware Tech x86 VirtDocument9 paginiSoftware Hardware Tech x86 VirtwyfwongÎncă nu există evaluări
- Circular Tank Radius CalculationDocument25 paginiCircular Tank Radius CalculationQamar AbbasÎncă nu există evaluări
- 1893 Shadow RunDocument6 pagini1893 Shadow RungibbamonÎncă nu există evaluări
- SEO ProposalDocument5 paginiSEO ProposalShivdev SaiÎncă nu există evaluări
- Smart Payment MeterDocument2 paginiSmart Payment MeterJesus Castro OrozcoÎncă nu există evaluări
- PMO ProceduresDocument21 paginiPMO ProceduresTariq JamalÎncă nu există evaluări
- Understand Centrifugal CompressorDocument16 paginiUnderstand Centrifugal Compressorramanathan72-1100% (2)
- Vantio CacheServe 7.2.0 Administrators Manual 20161208 PDFDocument577 paginiVantio CacheServe 7.2.0 Administrators Manual 20161208 PDFPaulette Servin100% (1)
- Report On Corporate Communication Strategy Analysis ofDocument38 paginiReport On Corporate Communication Strategy Analysis ofNAFISA ISLAMÎncă nu există evaluări