S-ar putea să vă placă și
- I/O Port Structure: by B. Prasanthi, Assistant Professor Department. of ECE AITS, RajampetDocument40 paginiI/O Port Structure: by B. Prasanthi, Assistant Professor Department. of ECE AITS, RajampetNaganarasaiah GoudÎncă nu există evaluări
- U-I 1.small Signal Analysis of Junction TransistorDocument22 paginiU-I 1.small Signal Analysis of Junction TransistorNaganarasaiah GoudÎncă nu există evaluări
- EC Unit 1 - Analysis of CE, CC, CB Circuits Using H ParametersDocument25 paginiEC Unit 1 - Analysis of CE, CC, CB Circuits Using H ParametersNaganarasaiah GoudÎncă nu există evaluări
- U-I 2.procedure For Analysis and Design ExamplesDocument10 paginiU-I 2.procedure For Analysis and Design ExamplesNaganarasaiah GoudÎncă nu există evaluări
- TimersDocument5 paginiTimersNaganarasaiah GoudÎncă nu există evaluări
- 4.day 6 DPT Chemistry PDFDocument5 pagini4.day 6 DPT Chemistry PDFNaganarasaiah GoudÎncă nu există evaluări
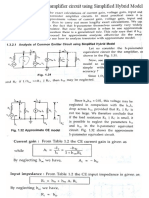
- U-I 3.analysis of Transistor Using Simplified CircuitDocument6 paginiU-I 3.analysis of Transistor Using Simplified CircuitNaganarasaiah GoudÎncă nu există evaluări
- Multirate Digital Signal ProcessingDocument64 paginiMultirate Digital Signal Processingkishore_k777Încă nu există evaluări
- 8051 Timer/counter: Hsabaghianb at Kashanu - Ac.ir 1Document109 pagini8051 Timer/counter: Hsabaghianb at Kashanu - Ac.ir 1amolmule123Încă nu există evaluări
- 5 Instruction SetDocument42 pagini5 Instruction SetAnonymous PPCC2DAVÎncă nu există evaluări
- Multirate Digital Signal ProcessingDocument64 paginiMultirate Digital Signal Processingkishore_k777Încă nu există evaluări
- 8253/54 Timer: Section 5.1 8253/54 Timer Description and InitializationDocument19 pagini8253/54 Timer: Section 5.1 8253/54 Timer Description and InitializationNaganarasaiah GoudÎncă nu există evaluări
- DSP-U5 - Musical Sound ProcessingDocument13 paginiDSP-U5 - Musical Sound ProcessingNaganarasaiah GoudÎncă nu există evaluări
- DSP-U5 - SC, AtoD, DtoADocument7 paginiDSP-U5 - SC, AtoD, DtoANaganarasaiah GoudÎncă nu există evaluări
- DSP-U5 - SC, AtoD, DtoADocument7 paginiDSP-U5 - SC, AtoD, DtoANaganarasaiah GoudÎncă nu există evaluări
- 3.day 8 Equilibrium - Chemistry PDFDocument8 pagini3.day 8 Equilibrium - Chemistry PDFNaganarasaiah GoudÎncă nu există evaluări
- DSP - Unit 4 - DecimationDocument14 paginiDSP - Unit 4 - DecimationNaganarasaiah GoudÎncă nu există evaluări
- Decimation 1Document9 paginiDecimation 1Naganarasaiah GoudÎncă nu există evaluări
- Programmable Interval Timer 8253 (PIT) : COE305 LabDocument10 paginiProgrammable Interval Timer 8253 (PIT) : COE305 LabudayÎncă nu există evaluări
- Decimation 1Document9 paginiDecimation 1Naganarasaiah GoudÎncă nu există evaluări
- Dma 8237Document12 paginiDma 8237Naganarasaiah GoudÎncă nu există evaluări
- Architecture of Embedded HardwareDocument35 paginiArchitecture of Embedded HardwareNaganarasaiah GoudÎncă nu există evaluări
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Foreign Trading SystemDocument17 paginiForeign Trading SystemS Thavasumoorthi0% (1)
- Tuscor Lloyds - BrochureDocument9 paginiTuscor Lloyds - BrochureTuscor LloydsÎncă nu există evaluări
- GPPAQ - PDF VersionDocument1 paginăGPPAQ - PDF VersionEmma GundryÎncă nu există evaluări
- Soal Dan Jawaban Uas 2017Document8 paginiSoal Dan Jawaban Uas 2017wahyu dinÎncă nu există evaluări
- Review Notes in Introduction To Criminology & Psychology of CrimesDocument13 paginiReview Notes in Introduction To Criminology & Psychology of CrimesAizha Aizing Zuniga77% (13)
- Contemporary Teacher Leadership: Unit Evaluation: Report & RecommendationsDocument45 paginiContemporary Teacher Leadership: Unit Evaluation: Report & Recommendationsapi-478725922Încă nu există evaluări
- HG Quarter 1 Module 3Document6 paginiHG Quarter 1 Module 3Ian BoneoÎncă nu există evaluări
- Careers in The Tourism IndustryDocument18 paginiCareers in The Tourism Industry049 Rista MariantinaÎncă nu există evaluări
- Fellowship Proposal 2018Document4 paginiFellowship Proposal 2018Sheraz Cheema100% (2)
- Joanne Mae VDocument2 paginiJoanne Mae VAndrea Denise VillafuerteÎncă nu există evaluări
- The Law Explained Session 1 The Fundamental Truths of LawDocument9 paginiThe Law Explained Session 1 The Fundamental Truths of LawMinister100% (1)
- Background of The StudyDocument63 paginiBackground of The StudyNaimul KaderÎncă nu există evaluări
- DLL G6 Q4 WEEK 5 ALL SUBJECTS Mam Inkay PeraltaDocument64 paginiDLL G6 Q4 WEEK 5 ALL SUBJECTS Mam Inkay Peraltaedelberto100% (1)
- PP Vs MamuyacDocument8 paginiPP Vs MamuyacShaine ArellanoÎncă nu există evaluări
- Guide To Pre-Week PlanningDocument3 paginiGuide To Pre-Week Planningjorge samahaÎncă nu există evaluări
- 0523 s18 Ms 1 PDFDocument15 pagini0523 s18 Ms 1 PDFtechang1Încă nu există evaluări
- The Philippine Bangsamoro ConflictDocument20 paginiThe Philippine Bangsamoro Conflictmindanaopeace100% (1)
- Presentation of The ParticipantsDocument3 paginiPresentation of The ParticipantsSheryl Alelee ganteÎncă nu există evaluări
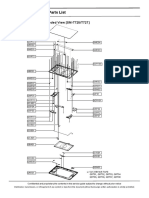
- Exploded View and Parts ListDocument2 paginiExploded View and Parts ListVietmobile PageÎncă nu există evaluări
- Case: Tejidos Lope Ltda.Document2 paginiCase: Tejidos Lope Ltda.JENNIFER YOLEINY SALGADO VARGASÎncă nu există evaluări
- Call For Paper 2020Document3 paginiCall For Paper 2020aquino de la peña100% (1)
- Breakingtheplasticwave ReportDocument78 paginiBreakingtheplasticwave Reportmagizh tamizhiniÎncă nu există evaluări
- Sales Letter - To Promote A Product or ServiceDocument2 paginiSales Letter - To Promote A Product or Serviceapi-3797608100% (2)
- CBC Mechanical Drafting NC IDocument49 paginiCBC Mechanical Drafting NC ICharo GironellaÎncă nu există evaluări
- Cebu Institute of Technology UniversityDocument4 paginiCebu Institute of Technology UniversitydummyÎncă nu există evaluări
- Week 6 John Gabriel O. Gerochi KintanarDocument3 paginiWeek 6 John Gabriel O. Gerochi KintanarZyrine Geneta DiodocoÎncă nu există evaluări
- Design Thinking of AirbnbDocument2 paginiDesign Thinking of AirbnbranasalvaÎncă nu există evaluări
- A History of Architectural Conservation PDFDocument11 paginiA History of Architectural Conservation PDFAtique MughalÎncă nu există evaluări
- Introduction To Operations ManagementDocument25 paginiIntroduction To Operations ManagementEkin IsaÎncă nu există evaluări
- SKILL Language User Guide Known Problems and Solutions: Product Version 5.0 May 2003Document6 paginiSKILL Language User Guide Known Problems and Solutions: Product Version 5.0 May 2003FernandoFerP.RÎncă nu există evaluări