S-ar putea să vă placă și
- Operator Manual Hectronic Remote ControlDocument24 paginiOperator Manual Hectronic Remote Controltikrit80% (5)
- Operator Manual Hectronic Remote ControlDocument24 paginiOperator Manual Hectronic Remote Controltikrit80% (5)
- CDDH SP EN НОВЫЙDocument33 paginiCDDH SP EN НОВЫЙHomie PawÎncă nu există evaluări
- SmartRoc D65 System Description V 4.8Document93 paginiSmartRoc D65 System Description V 4.8salvador341100% (1)
- Mitsubishi FD20CN, FD20N, FD25N, FD30N, FD35AN, FGE15N, FGE18N, FGE20CN, FGE20N, FGE20ZN Service ManualDocument22 paginiMitsubishi FD20CN, FD20N, FD25N, FD30N, FD35AN, FGE15N, FGE18N, FGE20CN, FGE20N, FGE20ZN Service ManualLeotubeÎncă nu există evaluări
- Diagrams, Odin-ThorDocument30 paginiDiagrams, Odin-ThorЕгор Егор100% (1)
- HW7 SolutionDocument7 paginiHW7 SolutionJohn Michael Go AbalosÎncă nu există evaluări
- PDFDocument434 paginiPDFErn100% (2)
- 3784A KXX K4J K4M Clio Motor ManualDocument32 pagini3784A KXX K4J K4M Clio Motor ManualDavid NebainÎncă nu există evaluări
- Sect 1 Troubleshooting 1fs Engine Ce303Document7 paginiSect 1 Troubleshooting 1fs Engine Ce303laura MtÎncă nu există evaluări
- Error Code Tyt 8fd-G-15Document549 paginiError Code Tyt 8fd-G-15aleksandar.stamenkovskiÎncă nu există evaluări
- Toyota x888 RM Section 2 3Document190 paginiToyota x888 RM Section 2 3ssinokrotÎncă nu există evaluări
- CBT y 4 - 6 Ce654-1Document241 paginiCBT y 4 - 6 Ce654-1Widlak KocełakÎncă nu există evaluări
- 8FBE RM CE206 Section 3 Troubleshooting Vol. 2 - CodigosDocument517 pagini8FBE RM CE206 Section 3 Troubleshooting Vol. 2 - CodigosCesar MendozaÎncă nu există evaluări
- l16!14!2009 - Manual de PartesDocument247 paginil16!14!2009 - Manual de PartesjdromeroÎncă nu există evaluări
- XG25-XG30: 44208060100 REV.003 03/2008 This Catalogue Is Valid For Trucks As From Serial NumbersDocument153 paginiXG25-XG30: 44208060100 REV.003 03/2008 This Catalogue Is Valid For Trucks As From Serial Numbersalexandre donizetiÎncă nu există evaluări
- Manuale Carrello A Gas 1.5-3.5 Tonnellate GRENDiA ESDocument17 paginiManuale Carrello A Gas 1.5-3.5 Tonnellate GRENDiA ESryo asg3Încă nu există evaluări
- Rear Axle Parts for CAT TelehandlersDocument2 paginiRear Axle Parts for CAT TelehandlersleogerguzÎncă nu există evaluări
- EPT20M Nuevo 2009Document58 paginiEPT20M Nuevo 2009SARAMQRÎncă nu există evaluări
- 1.0-1.75ton Forklift SpecsDocument26 pagini1.0-1.75ton Forklift SpecsМаратÎncă nu există evaluări
- 15LC, 18LC, 20 LC-7ADocument196 pagini15LC, 18LC, 20 LC-7AKiều Văn TrungÎncă nu există evaluări
- Charging System Disassembly GuideDocument13 paginiCharging System Disassembly Guidelaura MtÎncă nu există evaluări
- RM - DT GT15 35 2p1064571868 PDFDocument174 paginiRM - DT GT15 35 2p1064571868 PDFДима Селютин0% (1)
- Maximal Diesel Forklift Japanese 2.0-3.5tDocument2 paginiMaximal Diesel Forklift Japanese 2.0-3.5tFaizal JamalÎncă nu există evaluări
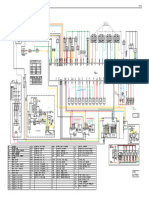
- Fig. 1 Circuit Diagram: The Figures Described in The Table Obtained at Heli Test TruckDocument1 paginăFig. 1 Circuit Diagram: The Figures Described in The Table Obtained at Heli Test TruckAdam SchwemleinÎncă nu există evaluări
- ETM/V 214-325: Operating InstructionsDocument163 paginiETM/V 214-325: Operating InstructionsMahmoud Elpop ElsalhÎncă nu există evaluări
- Toyota x888 RM Section 16 eDocument690 paginiToyota x888 RM Section 16 ealsief1951Încă nu există evaluări
- Jungheiricht ReachDocument252 paginiJungheiricht ReachAlexandru PetrovaiÎncă nu există evaluări
- FB5P 50 PDFDocument109 paginiFB5P 50 PDFДмитрийÎncă nu există evaluări
- SM-XF-12T-IC Forklift-202012-EN-CEDocument126 paginiSM-XF-12T-IC Forklift-202012-EN-CEmirko coppiniÎncă nu există evaluări
- GE-15052 (UPDAT 8FG10-J35, 8fg35N-80N)Document59 paginiGE-15052 (UPDAT 8FG10-J35, 8fg35N-80N)Duong Van HoanÎncă nu există evaluări
- EPT20-13&15ET Operation Manual 20120806 (C)Document37 paginiEPT20-13&15ET Operation Manual 20120806 (C)Tommy TorstenssonÎncă nu există evaluări
- CPD20SQ-GE2Li WholeDocument211 paginiCPD20SQ-GE2Li Wholeuri.cruz.zamoraÎncă nu există evaluări
- Front Axle and Reduction DifferentialDocument27 paginiFront Axle and Reduction DifferentialDmitry100% (1)
- Toyota Forklift 8FBC (H) U Service Manual CU347-1 Vol.2Document717 paginiToyota Forklift 8FBC (H) U Service Manual CU347-1 Vol.2garzaalejandro40782Încă nu există evaluări
- Nissan Forklift Diesel 2-3,5 Ton Service Guide - WatermarkDocument12 paginiNissan Forklift Diesel 2-3,5 Ton Service Guide - WatermarkJaime MurilloÎncă nu există evaluări
- 8FBR10-30 Shinko - SumitomoDocument6 pagini8FBR10-30 Shinko - SumitomoSetiyo PambudiÎncă nu există evaluări
- 55F SSS A245r3Document6 pagini55F SSS A245r3mtworusÎncă nu există evaluări
- 1557200526147170617Document13 pagini1557200526147170617علی چیواییÎncă nu există evaluări
- SKF Sensor Bearings - Motor Encoder Unit - Feb 2015Document2 paginiSKF Sensor Bearings - Motor Encoder Unit - Feb 2015rominaDnÎncă nu există evaluări
- Toyota 8FBDocument72 paginiToyota 8FBTERRYÎncă nu există evaluări
- Toyota 4Y Engine Service ManualDocument209 paginiToyota 4Y Engine Service ManualJose CarmonaÎncă nu există evaluări
- Sect 7 Ignition System 1fs Engine Ce303Document5 paginiSect 7 Ignition System 1fs Engine Ce303laura MtÎncă nu există evaluări
- CPC 20Document98 paginiCPC 20juan david lópez montalegreÎncă nu există evaluări
- Hyunday ForkliftDocument6 paginiHyunday ForkliftIrham M AFÎncă nu există evaluări
- PC-J+1 5-2 0t+electric+reach+truck+ (Stand-On) 2015 1Document75 paginiPC-J+1 5-2 0t+electric+reach+truck+ (Stand-On) 2015 1Júlio César NovaesÎncă nu există evaluări
- Wiring Diagram # 1 - 8FBDocument1 paginăWiring Diagram # 1 - 8FBFernando RamosÎncă nu există evaluări
- Peb16e2 01Document549 paginiPeb16e2 01LABARTHE ALEXISÎncă nu există evaluări
- C G42N3-80011 Transmission UnitDocument16 paginiC G42N3-80011 Transmission UnitJOAO BIANCHINIÎncă nu există evaluări
- CBD25T Electric Pallet Truck Operation Manual and Parts CatalogDocument48 paginiCBD25T Electric Pallet Truck Operation Manual and Parts CatalogoscarÎncă nu există evaluări
- 302032-000 1993 - February PDFDocument53 pagini302032-000 1993 - February PDFduongpn100% (1)
- Electric Forklift Stability and Control FeaturesDocument2 paginiElectric Forklift Stability and Control FeaturesTRM100% (1)
- Repair Manual: Installation Model(s) : R112, R114, R116Document5 paginiRepair Manual: Installation Model(s) : R112, R114, R116AhmetÎncă nu există evaluări
- Hyundai LPG Forklift Trucks - Powerful Tier 4 EngineDocument12 paginiHyundai LPG Forklift Trucks - Powerful Tier 4 Engineedwinvartuan-1Încă nu există evaluări
- General InformationDocument19 paginiGeneral InformationDmitryÎncă nu există evaluări
- Epl 15311Document42 paginiEpl 15311Jan Antonius DjunaediÎncă nu există evaluări
- Toyota 5FBCU15Document501 paginiToyota 5FBCU15Евгений100% (2)
- MM - Chapter 0Document37 paginiMM - Chapter 0JOSE ADOLFO MONTALVO QUINTAL.Încă nu există evaluări
- P01&P02ServiceManual-Steering SystemDocument40 paginiP01&P02ServiceManual-Steering Systemgerod25Încă nu există evaluări
- Heavy Duty FD 6 Ton - 10 Ton-BrochureDocument5 paginiHeavy Duty FD 6 Ton - 10 Ton-BrochureRidwanNurAhmadÎncă nu există evaluări
- XF Series 1.0t-1.8t IC Truck Parts Catalog 2021.11Document292 paginiXF Series 1.0t-1.8t IC Truck Parts Catalog 2021.11ScottJacksonÎncă nu există evaluări
- Steering Axle: PART NO. 897097 1600 SRM 316Document16 paginiSteering Axle: PART NO. 897097 1600 SRM 316Nguyễn Thanh NhànÎncă nu există evaluări
- 8 CPD30-35L1 Mast Parts Manual 20191101 - 20191101 - 154001Document79 pagini8 CPD30-35L1 Mast Parts Manual 20191101 - 20191101 - 154001pln up3Încă nu există evaluări
- Three-Phase Induction MotorDocument17 paginiThree-Phase Induction MotorAdarsh AdarshÎncă nu există evaluări
- Ac Motor: Induction Motor (Asynchronous Motor) Synchronous MotorDocument62 paginiAc Motor: Induction Motor (Asynchronous Motor) Synchronous MotorWeehao SiowÎncă nu există evaluări
- 4 HydraulicsDocument111 pagini4 Hydraulicsesteban muñoz100% (1)
- DL420 15c SpecificationsDocument4 paginiDL420 15c Specificationsesteban muñozÎncă nu există evaluări
- Doosan Compressor P425WCU, XP375WCU and HP375WCUDocument66 paginiDoosan Compressor P425WCU, XP375WCU and HP375WCUJames Ernest Garcia0% (1)
- 6 TransmissionDocument85 pagini6 Transmissionesteban muñoz100% (1)
- DL420 15c SpecificationsDocument4 paginiDL420 15c Specificationsesteban muñozÎncă nu există evaluări
- Parts Manual PDFDocument115 paginiParts Manual PDFChristian VillanuevaÎncă nu există evaluări
- Rotary Compressor Data Sheet with Key SpecsDocument1 paginăRotary Compressor Data Sheet with Key SpecsSURYAÎncă nu există evaluări
- 5 ElectricsDocument67 pagini5 Electricsesteban muñoz100% (1)
- 2 0 Engine AssemblyDocument23 pagini2 0 Engine Assemblyesteban muñozÎncă nu există evaluări
- Parts Manual PDFDocument115 paginiParts Manual PDFChristian VillanuevaÎncă nu există evaluări
- Parts Manual PDFDocument115 paginiParts Manual PDFChristian VillanuevaÎncă nu există evaluări
- Micron 7Document32 paginiMicron 7tsdcnÎncă nu există evaluări
- GA 132 VSD - 150 Psi - Air Cooled - 2015 Rev 0Document1 paginăGA 132 VSD - 150 Psi - Air Cooled - 2015 Rev 0esteban muñozÎncă nu există evaluări
- Parts Manual PDFDocument115 paginiParts Manual PDFChristian VillanuevaÎncă nu există evaluări
- DDR 30 Spec PDFDocument4 paginiDDR 30 Spec PDFencus170785Încă nu există evaluări
- Dl421 Specification Sheet EnglishDocument4 paginiDl421 Specification Sheet Englishmitch grievesÎncă nu există evaluări
- Powerroc T35: Atlas Copco Surface Drill RigsDocument4 paginiPowerroc T35: Atlas Copco Surface Drill Rigsesteban muñozÎncă nu există evaluări
- Technical Information: Joystick Pvres and PvrelDocument16 paginiTechnical Information: Joystick Pvres and PvrelSUERDANOSSÎncă nu există evaluări
- HBC Smart Options: Safety. Efficiency. ComfortDocument24 paginiHBC Smart Options: Safety. Efficiency. Comfortesteban muñozÎncă nu există evaluări
- Operations Manual 2012Document102 paginiOperations Manual 2012MuhaiminÎncă nu există evaluări
- 9852 1974 01 Operator's Instructions ROC D3-01Document87 pagini9852 1974 01 Operator's Instructions ROC D3-01esteban muñoz100% (1)
- DELMAG Maeklerprospekt enDocument8 paginiDELMAG Maeklerprospekt enKenan ButurovicÎncă nu există evaluări
- ShopSupplies&Tools PDFDocument320 paginiShopSupplies&Tools PDFpaimporcateÎncă nu există evaluări
- Atlas Copco Rock ReinforcementDocument2 paginiAtlas Copco Rock Reinforcementesteban muñozÎncă nu există evaluări
- MAI SDA Accessories 9851 2269 01 PDFDocument4 paginiMAI SDA Accessories 9851 2269 01 PDFesteban muñozÎncă nu există evaluări
- MAI R32N&S 9851 2230 01cDocument2 paginiMAI R32N&S 9851 2230 01cesteban muñozÎncă nu există evaluări
- Lect 5 - Mechanism DescriptionDocument15 paginiLect 5 - Mechanism Descriptionjackie delos santosÎncă nu există evaluări
- Examples and Problem Questions On Speed Control of DC Motors, Controlled Rectifier DC Drives and Chopper Controlled PDFDocument7 paginiExamples and Problem Questions On Speed Control of DC Motors, Controlled Rectifier DC Drives and Chopper Controlled PDFaswardi100% (1)
- Report of Intelligent Braking SystemDocument29 paginiReport of Intelligent Braking SystemHarsh Gaming100% (3)
- Parts Guide: AL-1217 AL-1226Document38 paginiParts Guide: AL-1217 AL-1226AAAMAROÎncă nu există evaluări
- Eaton 420 PartsDocument16 paginiEaton 420 PartsF Labio Alex100% (1)
- GMW14359 Procedure For Test of Cellular and Related Materials Determination of Indentation Load Deflection and Hardness NumberDocument6 paginiGMW14359 Procedure For Test of Cellular and Related Materials Determination of Indentation Load Deflection and Hardness NumberLaboratorio Hope GlobalÎncă nu există evaluări
- Suction-Specific Speed:: Questions and Answers About Pumping's Least Understood MeasureDocument5 paginiSuction-Specific Speed:: Questions and Answers About Pumping's Least Understood MeasureLuis Joel Ramos RamosÎncă nu există evaluări
- Water Wasser: PN 10... 25 DN 300, 500, 600, 800Document3 paginiWater Wasser: PN 10... 25 DN 300, 500, 600, 800AhmedRamadanÎncă nu există evaluări
- Shear & Diagonal Tension in BeamsDocument15 paginiShear & Diagonal Tension in BeamsS. M. ZAHIDUR RAHMAN 1301129Încă nu există evaluări
- Cane Shredder 2Document9 paginiCane Shredder 2Dirajen Pullay MardayÎncă nu există evaluări
- M.E. - Heat Power RGPV Syllabus 2011Document5 paginiM.E. - Heat Power RGPV Syllabus 2011Arun MalviyaÎncă nu există evaluări
- Super Aero City CNG Bus: Owner'S Manual Operation Maintenance SpecificationsDocument208 paginiSuper Aero City CNG Bus: Owner'S Manual Operation Maintenance SpecificationsHuu NguyenÎncă nu există evaluări
- QSL9 Series PDFDocument4 paginiQSL9 Series PDFAnonymous 3RS6JNcÎncă nu există evaluări
- Hydraulic Hose PDFDocument86 paginiHydraulic Hose PDFAgus Yulfizar100% (1)
- Calculation of Gear Dimensions - KHK Gears PDFDocument25 paginiCalculation of Gear Dimensions - KHK Gears PDFlawlawÎncă nu există evaluări
- Difference Between Spillback and Minimum Circulation Line - Google SearchDocument1 paginăDifference Between Spillback and Minimum Circulation Line - Google SearchGourav KumarÎncă nu există evaluări
- ElectricianSemIICITSQB PDFDocument82 paginiElectricianSemIICITSQB PDFmarvin2008Încă nu există evaluări
- Manual Awp Le Blanc Pag. 147Document231 paginiManual Awp Le Blanc Pag. 147Ruben Alejandro Yam PechÎncă nu există evaluări
- Grindex Lista de PartesDocument28 paginiGrindex Lista de PartesMarco Antonio Cerna HaroÎncă nu există evaluări
- Thermodynamics 2 Module #2 Rankine CycleDocument19 paginiThermodynamics 2 Module #2 Rankine CycleJohn Rexel CaroÎncă nu există evaluări
- (Morton M Denn) Polymer Melt Processing FoundatiDocument262 pagini(Morton M Denn) Polymer Melt Processing FoundatiProbabilidad EstadísticaÎncă nu există evaluări
- HP Heaters Operation During Start Up of UnitDocument1 paginăHP Heaters Operation During Start Up of UnitMuhammad luqman100% (1)
- Daftar Isi: Power TrainDocument72 paginiDaftar Isi: Power Trainkuysrz100% (10)
- Esquema Elétrico NGD 9.3 PDFDocument2 paginiEsquema Elétrico NGD 9.3 PDFluiskovalchukÎncă nu există evaluări
- Diamondchaincoctalogo PDFDocument151 paginiDiamondchaincoctalogo PDFFranco Matias TemporinÎncă nu există evaluări
- Adjusting Hydraulic Conversion Brake-Park BrakeDocument2 paginiAdjusting Hydraulic Conversion Brake-Park Brakev53Încă nu există evaluări
- SGL PT Brochure Graphite Block Heat ExchangersDocument16 paginiSGL PT Brochure Graphite Block Heat ExchangersdardocapoÎncă nu există evaluări
- Applied mechanics (CE 101T) - Simple machines overviewDocument49 paginiApplied mechanics (CE 101T) - Simple machines overviewdarshanÎncă nu există evaluări
- USBOOSTERS Booster Compressors 06-2017!46!37064Document8 paginiUSBOOSTERS Booster Compressors 06-2017!46!37064fherlixÎncă nu există evaluări