S-ar putea să vă placă și
- La Union Hace La Fuerza PDFDocument14 paginiLa Union Hace La Fuerza PDFNéstor RodríguezÎncă nu există evaluări
- Calculo de Bobinado PDFDocument67 paginiCalculo de Bobinado PDFJulio Dalens Vargas100% (4)
- SCE ES 900-011 Startup LOGO! 0BA8 R1603Document41 paginiSCE ES 900-011 Startup LOGO! 0BA8 R1603zscagrÎncă nu există evaluări
- INTRUMENTACIONDocument46 paginiINTRUMENTACIONpak121212Încă nu există evaluări
- 2014 AGO - Control Vectorial en VariadoresDocument2 pagini2014 AGO - Control Vectorial en Variadoresenrique zamoraÎncă nu există evaluări
- Tema 1 - Introduccion A La Psicología PDFDocument30 paginiTema 1 - Introduccion A La Psicología PDFRudyRenzoAraujoHinostrozaÎncă nu există evaluări
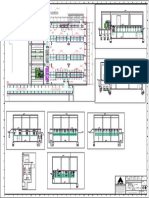
- Bandejas Edificio Eléctrico PDFDocument1 paginăBandejas Edificio Eléctrico PDFJesus Ricardo Avalos MeloÎncă nu există evaluări
- 744hart Ugspa0000 PDFDocument30 pagini744hart Ugspa0000 PDFVictor FreireÎncă nu există evaluări
- Factor de PotenciaDocument20 paginiFactor de Potencia040457Încă nu există evaluări
- Diseño de Un Banco de Condensadores - Diego ChicaizaDocument127 paginiDiseño de Un Banco de Condensadores - Diego ChicaizaEdgar MamaniÎncă nu există evaluări
- Maquinas SincronicasDocument14 paginiMaquinas SincronicasLolsito PyÎncă nu există evaluări
- Cálculos de IluminaciónDocument214 paginiCálculos de IluminaciónelectrofuerteÎncă nu există evaluări
- Recetas Con TofuDocument6 paginiRecetas Con TofuMayteeÎncă nu există evaluări
- Home Made Test 4, With Answers, Based On No. 5bDocument23 paginiHome Made Test 4, With Answers, Based On No. 5bdutyinternalÎncă nu există evaluări
- Materiales de Construcción - Unidad 3 - Semana 3 - 1Document28 paginiMateriales de Construcción - Unidad 3 - Semana 3 - 1Carlos Andres Gaspar CamposÎncă nu există evaluări
- Catalogo de AccesoriosDocument36 paginiCatalogo de AccesoriosVanesa Marin LopezÎncă nu există evaluări
- Repaso de RN Puerto RicoDocument50 paginiRepaso de RN Puerto Rico6ydwtzjc8yÎncă nu există evaluări
- Impacto de La Robotica en La Industria - WordDocument22 paginiImpacto de La Robotica en La Industria - WordCristhiam De LeónÎncă nu există evaluări
- Proyecto QFDDocument40 paginiProyecto QFDOsvaldo BenitezÎncă nu există evaluări
- Clasificación de Enlaces Químicos para Tercer Grado de SecundariaDocument4 paginiClasificación de Enlaces Químicos para Tercer Grado de SecundariavictorÎncă nu există evaluări
- Impacto Ambiental Evaluación Matriz Conessa y LeopolDocument34 paginiImpacto Ambiental Evaluación Matriz Conessa y LeopolmarleneÎncă nu există evaluări
- Paraboloide Eliptico PARA PDFDocument14 paginiParaboloide Eliptico PARA PDFcbupamelapijaÎncă nu există evaluări
- Guia Gestion Energetica Puertos FirmadaDocument296 paginiGuia Gestion Energetica Puertos FirmadaFran Pereira PedreiraÎncă nu există evaluări
- Pathophysiological Mechanisms in Acute Pancreatitis Current Understanding - En.esDocument14 paginiPathophysiological Mechanisms in Acute Pancreatitis Current Understanding - En.esmetafan_1Încă nu există evaluări
- Carta Pizzeria CarlosDocument1 paginăCarta Pizzeria CarlosChema GarciaÎncă nu există evaluări
- Balotario de Endocrinologia 2017Document4 paginiBalotario de Endocrinologia 2017AraaliNeyraGarayÎncă nu există evaluări
- Levadurayeastespaolcompleto-Chris-White-Amp-Jamil-Zanisheef PartDocument10 paginiLevadurayeastespaolcompleto-Chris-White-Amp-Jamil-Zanisheef PartMarcelo Martinez CajigasÎncă nu există evaluări
- Corrientes de La PinturaDocument7 paginiCorrientes de La PinturaCezar Diaz CastilloÎncă nu există evaluări
- Apendice D - Preguntas Técnicas GeneralDocument51 paginiApendice D - Preguntas Técnicas Generalgustavo lizanaÎncă nu există evaluări
- Ensayo-Cambio-Climtico-1-638 (7 Files Merged)Document8 paginiEnsayo-Cambio-Climtico-1-638 (7 Files Merged)Daniel Mamani ParedesÎncă nu există evaluări
- El Espacio Como Sujeto de La Transgresión Fantástica - García PatriciaDocument12 paginiEl Espacio Como Sujeto de La Transgresión Fantástica - García PatriciaLaura AguirreÎncă nu există evaluări
- PRÁCTICA No2Document4 paginiPRÁCTICA No2karolÎncă nu există evaluări
- Presentacion de Analisis DinámicoDocument46 paginiPresentacion de Analisis DinámicoFabian GutierrezÎncă nu există evaluări
- Ebullicion Del AguaDocument2 paginiEbullicion Del AguaAntonio GomezÎncă nu există evaluări
- Guia Insarag Volumen Ii OperacionesDocument57 paginiGuia Insarag Volumen Ii OperacionesPablo VásquezÎncă nu există evaluări
- Fichas de Regulación EmocionalDocument11 paginiFichas de Regulación EmocionalCs ChiaraÎncă nu există evaluări
- 2 Cristalografia UPTC SegundoDocument144 pagini2 Cristalografia UPTC SegundoStefany Alejandra Fonseca MoralesÎncă nu există evaluări
- Ap3 TransporteDocument12 paginiAp3 Transportediego_xpÎncă nu există evaluări
- Cuidados Tratamiento de Braquiterapia de Próstata Semillas Yodo RevisadoDocument3 paginiCuidados Tratamiento de Braquiterapia de Próstata Semillas Yodo RevisadoDana AnayaÎncă nu există evaluări
- Actas de Las V Jornadas Prebendado PacheDocument320 paginiActas de Las V Jornadas Prebendado PacheRoberto González ZalacainÎncă nu există evaluări
- Unidad de Repaso PDFDocument28 paginiUnidad de Repaso PDFLuis CarrilloÎncă nu există evaluări
- La Recaida en La ObesidadDocument4 paginiLa Recaida en La ObesidadCarlos PelozoÎncă nu există evaluări