S-ar putea să vă placă și
- Imesa Waching Machine Service Manual PDFDocument24 paginiImesa Waching Machine Service Manual PDFbasheer almetwakel100% (9)
- HagerDocument441 paginiHagerspakumaranÎncă nu există evaluări
- SP Flash Tool Error (FIX)Document13 paginiSP Flash Tool Error (FIX)Faami50% (2)
- ALSTOM Relay CatalogueDocument20 paginiALSTOM Relay CatalogueINZAMAM MUSHTAQÎncă nu există evaluări
- PLC Level 1Document46 paginiPLC Level 1Mohamed MamdouhÎncă nu există evaluări
- Lecture 7 - Sensors & TransducersDocument60 paginiLecture 7 - Sensors & TransducersSceva AquilaÎncă nu există evaluări
- Manual Detector Gas NB 983Document2 paginiManual Detector Gas NB 983SantiÎncă nu există evaluări
- Motor Trifazat Alimentat in MonofazatDocument8 paginiMotor Trifazat Alimentat in Monofazatadina_aalÎncă nu există evaluări
- SSVR Single Phase enDocument4 paginiSSVR Single Phase enankur rathiÎncă nu există evaluări
- Cmmo STDocument13 paginiCmmo STLila HumanÎncă nu există evaluări
- Wizmart & Global Fire Equipment - 01.10.2014. - Srbija PDFDocument9 paginiWizmart & Global Fire Equipment - 01.10.2014. - Srbija PDFSigurnostDooÎncă nu există evaluări
- Using LEGO NXT Mobile Robots With LabVIEW For Undergraduate Courses On MechatronicsDocument7 paginiUsing LEGO NXT Mobile Robots With LabVIEW For Undergraduate Courses On MechatronicsPravin BeheraÎncă nu există evaluări
- Didactic Katalog 2011 en MonitorDocument420 paginiDidactic Katalog 2011 en MonitorLeandro Baran100% (1)
- Simboluri ElectriceDocument13 paginiSimboluri Electriceandreiandrei573Încă nu există evaluări
- Inverter CircuitsDocument15 paginiInverter CircuitsdanilaluminaÎncă nu există evaluări
- Festo MPS-DDocument12 paginiFesto MPS-DBenjie DucutÎncă nu există evaluări
- An Introduction To IO LinkDocument12 paginiAn Introduction To IO LinkaetguitarsÎncă nu există evaluări
- 01 Fail Safe PlanningDocument11 pagini01 Fail Safe Planningbehrooz100% (1)
- Process Controller Maxxis 5 PR 5900: Installation ManualDocument136 paginiProcess Controller Maxxis 5 PR 5900: Installation ManualVan ScootÎncă nu există evaluări
- 601P Install ManualDocument2 pagini601P Install ManualDanut Stefan100% (2)
- British Standard: A Single Copy of This British Standard Is Licensed ToDocument23 paginiBritish Standard: A Single Copy of This British Standard Is Licensed ToJack KogulanÎncă nu există evaluări
- Getting Started With Z-WaveDocument43 paginiGetting Started With Z-Wavekasiab19859266Încă nu există evaluări
- 06 CouplersDocument21 pagini06 CouplersbehroozÎncă nu există evaluări
- ALLEN-BRADLEY'S POWER SYSTEM HARMONICS (A Reference Guide To Causes, Effects and Corrective Measures)Document14 paginiALLEN-BRADLEY'S POWER SYSTEM HARMONICS (A Reference Guide To Causes, Effects and Corrective Measures)Alda EnglandÎncă nu există evaluări
- RAC-2400V: Multi Door Control Panel & Image Capture / QueryDocument1 paginăRAC-2400V: Multi Door Control Panel & Image Capture / QueryUchenna NwobodoÎncă nu există evaluări
- MpsDocument8 paginiMpsVictor AlÎncă nu există evaluări
- Arduino Como Automata PLC - MikroplanDocument2 paginiArduino Como Automata PLC - MikroplanJesus Gerardo Esparza LopezÎncă nu există evaluări
- HMI and SCADA SystemsDocument9 paginiHMI and SCADA SystemsFran JimenezÎncă nu există evaluări
- Codigos de Error Akzm 656Document9 paginiCodigos de Error Akzm 656hskv20025525Încă nu există evaluări
- DC TO DC Buck Book ConvertorDocument20 paginiDC TO DC Buck Book ConvertorAmit KumarÎncă nu există evaluări
- Datasheet THEIA TL Central v6Document2 paginiDatasheet THEIA TL Central v6Sanjeev RajputÎncă nu există evaluări
- Modbus Application Protocol V1 1b3Document50 paginiModbus Application Protocol V1 1b3doce12Încă nu există evaluări
- TL431 / TL432 Precision Programmable Reference: 1 Features 3 DescriptionDocument83 paginiTL431 / TL432 Precision Programmable Reference: 1 Features 3 DescriptionSilvando MartinsÎncă nu există evaluări
- IntrerupatoareDocument85 paginiIntrerupatoareciucatuÎncă nu există evaluări
- Relee MediasDocument50 paginiRelee MediasnorakutyÎncă nu există evaluări
- Lecture 1Document39 paginiLecture 1kasunweera100% (1)
- What Is Switchgear?: Quick Links To Fundamentals of Low-Voltage SwitchgearDocument29 paginiWhat Is Switchgear?: Quick Links To Fundamentals of Low-Voltage SwitchgearcachiletÎncă nu există evaluări
- Service Manual Acer Aspire 7720 7720GDocument102 paginiService Manual Acer Aspire 7720 7720GSoporte Tecnico Buenos AiresÎncă nu există evaluări
- Switchgear: Presented by Ajay Kumar Nikunj EMP NO-100326Document24 paginiSwitchgear: Presented by Ajay Kumar Nikunj EMP NO-100326SamÎncă nu există evaluări
- Measurement of High VoltageDocument2 paginiMeasurement of High VoltageShahzaid AhmadÎncă nu există evaluări
- Ingesco Pdc.E Lightning Rod: OperationDocument2 paginiIngesco Pdc.E Lightning Rod: Operationmazu_bzÎncă nu există evaluări
- Transducer: TypesDocument39 paginiTransducer: Typestujuh belasÎncă nu există evaluări
- SecoNET Tech 1-EnDocument71 paginiSecoNET Tech 1-EnGelu BordeaÎncă nu există evaluări
- CSR620 DSDocument4 paginiCSR620 DSLiviuÎncă nu există evaluări
- Hart Appguide PDFDocument156 paginiHart Appguide PDFealarconi7649Încă nu există evaluări
- SCADA Notes by Vijay Kumar Dubey (UNIT 1, 2 & 3)Document42 paginiSCADA Notes by Vijay Kumar Dubey (UNIT 1, 2 & 3)Muzammil KhanÎncă nu există evaluări
- Altivar 312 - ATV312H075N4Document4 paginiAltivar 312 - ATV312H075N4Jose Norton Doria100% (1)
- Circuit Breaker ComponentsDocument39 paginiCircuit Breaker ComponentsJesus VargasÎncă nu există evaluări
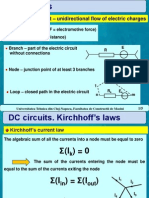
- DC Direct Current - Unidirectional Flow of Electric ChargesDocument5 paginiDC Direct Current - Unidirectional Flow of Electric ChargesMihai GînțaÎncă nu există evaluări
- 227 Electrical Power Quality-PEEL5403-8th Sem-ElectricalDocument66 pagini227 Electrical Power Quality-PEEL5403-8th Sem-ElectricalShashank RastogiÎncă nu există evaluări
- Theory:: Experiment 3 Buck ConverterDocument3 paginiTheory:: Experiment 3 Buck ConverterRAVI DUTTÎncă nu există evaluări
- Santerno Sinus Inverter Technical Manual PDFDocument219 paginiSanterno Sinus Inverter Technical Manual PDFMeysam100% (1)
- 15r0710b300 Sunway TG and TG Te Programming r05 enDocument181 pagini15r0710b300 Sunway TG and TG Te Programming r05 ensaneleÎncă nu există evaluări
- Volume 6 - Electrical Safety Audit in LV InstallationDocument31 paginiVolume 6 - Electrical Safety Audit in LV InstallationNik Panayo100% (1)
- 0503 Cross ReferencesDocument36 pagini0503 Cross Referencesbuturca sorinÎncă nu există evaluări
- Modern Intelligent Instruments - Theory and ApplicationDe la EverandModern Intelligent Instruments - Theory and ApplicationÎncă nu există evaluări
- Sensors and ActuatorsDocument109 paginiSensors and ActuatorsDr-Amit Kumar Singh100% (1)
- Electric Automation Don Bosco: Eng. Amir George Coordinator of Electric DPTDocument38 paginiElectric Automation Don Bosco: Eng. Amir George Coordinator of Electric DPTAbdelrhman ElkholyÎncă nu există evaluări
- Transducers 3Document15 paginiTransducers 3Rudra MishraÎncă nu există evaluări
- Non Contact Sensor PDFDocument24 paginiNon Contact Sensor PDFGaurav R AgrawalÎncă nu există evaluări
- Notes - Unit - 4Document25 paginiNotes - Unit - 4shubhtrip4Încă nu există evaluări
- External Advert: Trainee EngineerDocument4 paginiExternal Advert: Trainee EngineerOla JamesÎncă nu există evaluări
- S Pss ClassificationDocument16 paginiS Pss ClassificationOla JamesÎncă nu există evaluări
- 2019-2020 Quai Total International Scholarship Advert - Final AdvertDocument1 pagină2019-2020 Quai Total International Scholarship Advert - Final AdvertOla JamesÎncă nu există evaluări
- Free Download Here: Longman New General Mathematics Jss3 PDFDocument1 paginăFree Download Here: Longman New General Mathematics Jss3 PDFOla JamesÎncă nu există evaluări
- Flyer Academy March 2018 PDFDocument2 paginiFlyer Academy March 2018 PDFOla JamesÎncă nu există evaluări
- Practical - IDocument6 paginiPractical - IOla JamesÎncă nu există evaluări
- Supervised Learning: Linear Methods (1/2) : Applied Multivariate Statistics - Spring 2012Document15 paginiSupervised Learning: Linear Methods (1/2) : Applied Multivariate Statistics - Spring 2012Ola JamesÎncă nu există evaluări
- An Evaluation of K-Nearest Neighbour Imputation Using Likert DataDocument23 paginiAn Evaluation of K-Nearest Neighbour Imputation Using Likert DataOla JamesÎncă nu există evaluări
- What Factors Predict High School Graduation in The Los Angeles Unified School DistrictDocument32 paginiWhat Factors Predict High School Graduation in The Los Angeles Unified School DistrictOla JamesÎncă nu există evaluări
- 12 Perez Ramon TecsolGeo DelftDocument29 pagini12 Perez Ramon TecsolGeo DelftahmedÎncă nu există evaluări
- C801 DDRCSDocument64 paginiC801 DDRCSKeval8 VedÎncă nu există evaluări
- NX100 Epx2750Document69 paginiNX100 Epx2750Trí ChốtÎncă nu există evaluări
- Interpretation CPTDocument5 paginiInterpretation CPTNadeem AbbasiÎncă nu există evaluări
- Ex# (7.1-7.5) Second Year StepDocument11 paginiEx# (7.1-7.5) Second Year StepAqeel AbbasÎncă nu există evaluări
- Solution To Extra Problem Set 5Document13 paginiSolution To Extra Problem Set 5物理系小薯Încă nu există evaluări
- Schneider Electric Eocr I3bz User ManualDocument22 paginiSchneider Electric Eocr I3bz User Manualsaikat sarkarÎncă nu există evaluări
- LV Cable SLP-BH-1 To Sa2-011Document4 paginiLV Cable SLP-BH-1 To Sa2-011Vijayan Thekke VeeduÎncă nu există evaluări
- Sanwa YX-360TR MultitesterDocument14 paginiSanwa YX-360TR Multitestersupun_tharanga100% (1)
- European Steel and Alloy Grades: X90Crmov18 (1.4112)Document2 paginiEuropean Steel and Alloy Grades: X90Crmov18 (1.4112)farshid KarpasandÎncă nu există evaluări
- Non-Closed Lie Subgroups of Lie GroupsDocument6 paginiNon-Closed Lie Subgroups of Lie Groupslaura lopezÎncă nu există evaluări
- Lesson2 1-LightDocument4 paginiLesson2 1-LightGrace06 LabinÎncă nu există evaluări
- Aakash Home Assignment 8Document19 paginiAakash Home Assignment 8Pranav KapadiaÎncă nu există evaluări
- Briot 4000Document68 paginiBriot 4000Merzak BoukiÎncă nu există evaluări
- DS 20221019 SG4400UD-MV-20 Datasheet V14 ENDocument2 paginiDS 20221019 SG4400UD-MV-20 Datasheet V14 ENJosue Crespo GonzalezÎncă nu există evaluări
- ETAP Workshop Notes ANSI Short Circuit Example: DescriptionDocument6 paginiETAP Workshop Notes ANSI Short Circuit Example: DescriptionGanti KameshÎncă nu există evaluări
- Intera Standard Neuro: Changing How The World Looks at MRDocument46 paginiIntera Standard Neuro: Changing How The World Looks at MRJuan EspinozaÎncă nu există evaluări
- 2018 G11 Physics EM Freebooks - PK PDFDocument271 pagini2018 G11 Physics EM Freebooks - PK PDFAlishba ZahidÎncă nu există evaluări
- WTC 2020 - Full Paper 4 (REM Lining) - 414 - FinalDocument8 paginiWTC 2020 - Full Paper 4 (REM Lining) - 414 - FinalMehdi BakhshiÎncă nu există evaluări
- 1K Glueline: Solutions For The Application of 1K Adhesives and SealantsDocument23 pagini1K Glueline: Solutions For The Application of 1K Adhesives and Sealants李钊Încă nu există evaluări
- Lesson 3 Drawing in FlashDocument22 paginiLesson 3 Drawing in FlashDickerson Vallejos ManaloÎncă nu există evaluări
- Cardiac Measurements - TypicalValueDocument54 paginiCardiac Measurements - TypicalValueNam LeÎncă nu există evaluări
- Chem1777 1815Document4 paginiChem1777 1815Maki DonatoÎncă nu există evaluări
- MM2030 July2012 Quiz2Document1 paginăMM2030 July2012 Quiz2Arg SreekarÎncă nu există evaluări
- Conductors & Insulators-1Document35 paginiConductors & Insulators-1mariam.ahmed03Încă nu există evaluări
- Physics of The Solar Corona: An Introduction With Problems and SolutionsDocument19 paginiPhysics of The Solar Corona: An Introduction With Problems and Solutionsmohaddeceh mousaviÎncă nu există evaluări
- Mahima Ranjan Adhikari - Basic Algebraic Topology and Its Applications-Springer (2016)Document628 paginiMahima Ranjan Adhikari - Basic Algebraic Topology and Its Applications-Springer (2016)Walter Castañeda Diaz100% (3)
- Calero Caes Model Power SystemDocument13 paginiCalero Caes Model Power Systemzain ul AbideenÎncă nu există evaluări