S-ar putea să vă placă și
- 8086 MicroprocessorDocument21 pagini8086 MicroprocessorPinki KumariÎncă nu există evaluări
- Instruction Set 8085Document19 paginiInstruction Set 8085internetwealthdonÎncă nu există evaluări
- Assembler Language - 8051powerpoint PresentationDocument56 paginiAssembler Language - 8051powerpoint PresentationtauseeeeeeeeÎncă nu există evaluări
- Stack and SUBROUTINES Bindu AgarwallaDocument15 paginiStack and SUBROUTINES Bindu AgarwallaNobodyÎncă nu există evaluări
- Microprosser 8085Document15 paginiMicroprosser 8085saigdv1978Încă nu există evaluări
- Two Mark MicroprocessorDocument18 paginiTwo Mark MicroprocessorGopinathan MÎncă nu există evaluări
- Unit - 2 Central Processing Unit TOPIC 1: General Register OrganizationDocument13 paginiUnit - 2 Central Processing Unit TOPIC 1: General Register OrganizationRam Prasad GudiwadaÎncă nu există evaluări
- Micro ProcessorDocument85 paginiMicro Processorkishore532Încă nu există evaluări
- SYNAPSE Techno Design Innovation PVT LTDDocument47 paginiSYNAPSE Techno Design Innovation PVT LTDcobalt_1223Încă nu există evaluări
- Unit V-Initialization of 80386DXDocument16 paginiUnit V-Initialization of 80386DXshikhamailme84Încă nu există evaluări
- 8085 Instruction Set Gaonkar WordpresscomDocument4 pagini8085 Instruction Set Gaonkar WordpresscomPrabhat PankajÎncă nu există evaluări
- CoaDocument8 paginiCoaNikhil Singh ChauhanÎncă nu există evaluări
- Basic Architecture of 8085 Simulator:: GNUSIM8085Document5 paginiBasic Architecture of 8085 Simulator:: GNUSIM8085Harsh Modi100% (1)
- EC8681-Microprocessors and Microcontrollers Lab Manual Valliammai-1Document94 paginiEC8681-Microprocessors and Microcontrollers Lab Manual Valliammai-15016 V.GayathriÎncă nu există evaluări
- 8,16,32 Floating Point Processing in ARMDocument25 pagini8,16,32 Floating Point Processing in ARMOMKAR BHILARE100% (1)
- Microprocessor & Interfacing (BELL/BETL-504) Question Bank / TutorialDocument16 paginiMicroprocessor & Interfacing (BELL/BETL-504) Question Bank / TutorialVikas MahorÎncă nu există evaluări
- Functions, InterruptsDocument37 paginiFunctions, InterruptsPrasanna KumarÎncă nu există evaluări
- Chapter-5: Assembly Language Programming Using 8086 (16 Marks)Document55 paginiChapter-5: Assembly Language Programming Using 8086 (16 Marks)PRABHAKAR MOREÎncă nu există evaluări
- Write A Program To Multiply Two 16 Bit Binary NumbersDocument10 paginiWrite A Program To Multiply Two 16 Bit Binary NumbersAkansha SinghÎncă nu există evaluări
- 8085 Complete ArchitectureDocument39 pagini8085 Complete ArchitectureSana KhanÎncă nu există evaluări
- 2 Marks MPMCDocument39 pagini2 Marks MPMCGunasekaranÎncă nu există evaluări
- Chapter 8 - PipeliningDocument38 paginiChapter 8 - Pipeliningnagpal3Încă nu există evaluări
- 8255 Ppi ExamplesDocument10 pagini8255 Ppi Examplesvenky258100% (1)
- Chapter 3: Intel 8086Document135 paginiChapter 3: Intel 8086singhrps8483% (6)
- 8259a Programmable Interrupt Controller 2Document42 pagini8259a Programmable Interrupt Controller 2annushaÎncă nu există evaluări
- Tpi Lab Python EngDocument22 paginiTpi Lab Python EngVlad ManoleÎncă nu există evaluări
- Systems Software QuestionDocument82 paginiSystems Software QuestionkhalidÎncă nu există evaluări
- Unit 2Document44 paginiUnit 2nagpal3Încă nu există evaluări
- System Software Notes 5TH Sem VtuDocument25 paginiSystem Software Notes 5TH Sem VtuNeha Chinni50% (2)
- Lab 1Document7 paginiLab 1Tanjila Islam Ritu 1811017642Încă nu există evaluări
- 17CS44 Module-3 Part-A NotesDocument21 pagini17CS44 Module-3 Part-A Notesvishwa darshiniÎncă nu există evaluări
- Chapter5-The Memory SystemDocument78 paginiChapter5-The Memory SystemAvirup RayÎncă nu există evaluări
- Lab ManualDocument54 paginiLab ManualImmanuel VinothÎncă nu există evaluări
- Advanced Microprocessor PDFDocument1 paginăAdvanced Microprocessor PDFAmish Tankariya50% (2)
- Microprocessor and Architecture Solution PDFDocument23 paginiMicroprocessor and Architecture Solution PDFKarmaveer Bhaurao Patil CollegeÎncă nu există evaluări
- 8086 Microprocessor ArchitectureDocument30 pagini8086 Microprocessor ArchitectureprasadapawaskarÎncă nu există evaluări
- Ilovepdf MergedDocument430 paginiIlovepdf MergedYuvraj ChhabraÎncă nu există evaluări
- ARM 4 Part2Document9 paginiARM 4 Part2SUGYAN ANAND MAHARANAÎncă nu există evaluări
- Microprocessor and InterfacingDocument25 paginiMicroprocessor and InterfacingEr Bhavik PatelÎncă nu există evaluări
- Lab 5 Data Transfer: Y. Use The Simulator To Change The X Value and Single-Step Through TheDocument3 paginiLab 5 Data Transfer: Y. Use The Simulator To Change The X Value and Single-Step Through Thesabi1234Încă nu există evaluări
- Lab9 ReportDocument4 paginiLab9 ReportASAD REHANÎncă nu există evaluări
- ITSU 1001 Introduction To Computer Systems and Networking: Tutorial 5 For Lesson 5Document5 paginiITSU 1001 Introduction To Computer Systems and Networking: Tutorial 5 For Lesson 5Rakesh ydavÎncă nu există evaluări
- EE8551-Microprocessors and MicrocontrollersDocument13 paginiEE8551-Microprocessors and MicrocontrollersPACET EEEÎncă nu există evaluări
- 8086 MicroprocessorDocument37 pagini8086 MicroprocessorMahesh krishÎncă nu există evaluări
- Features of Micro-ProcessorDocument15 paginiFeatures of Micro-ProcessornobodyÎncă nu există evaluări
- Chapter 3: Jump, Loop and Call InstructionsDocument8 paginiChapter 3: Jump, Loop and Call InstructionsIsmailÎncă nu există evaluări
- 8279 Keyboard and Display ControllerDocument33 pagini8279 Keyboard and Display Controllergutzz0079197100% (1)
- DMADocument16 paginiDMALavish Garg0% (1)
- Address SequencingDocument4 paginiAddress Sequencinggdeepthi67% (3)
- Microcontroller and Embedded SystemsDocument2 paginiMicrocontroller and Embedded SystemsIndranilÎncă nu există evaluări
- Microprocessor and Its ApplicationsDocument166 paginiMicroprocessor and Its ApplicationsDhivya Gokul100% (1)
- Pin Diagram of 8086Document21 paginiPin Diagram of 8086adithya123456100% (5)
- COA Unit 1Document33 paginiCOA Unit 1Keshav NaganathanÎncă nu există evaluări
- CS CurriculumDocument113 paginiCS CurriculumFiseha Andarge EndalewÎncă nu există evaluări
- Addressing Modes of 8086Document13 paginiAddressing Modes of 8086Aakash Garg100% (1)
- Important Instructions To Examiners:: (Autonomous)Document29 paginiImportant Instructions To Examiners:: (Autonomous)Rohit Shinde RSÎncă nu există evaluări
- 8251 UsartDocument24 pagini8251 UsartNava KrishnanÎncă nu există evaluări
- Chap 5 - PPTDocument40 paginiChap 5 - PPTSwapnaliÎncă nu există evaluări
- Unit 1.4Document46 paginiUnit 1.4rameshwar chintamaniÎncă nu există evaluări
- Procedure 4Document20 paginiProcedure 4krishna_cad28Încă nu există evaluări
- Ficha Tecnica Iman PML-6Document5 paginiFicha Tecnica Iman PML-6Ruben TapiaÎncă nu există evaluări
- TeklaDocument13 paginiTeklaKamal MousserÎncă nu există evaluări
- CICO Plast N PDFDocument2 paginiCICO Plast N PDFASRAR AHMED KHANÎncă nu există evaluări
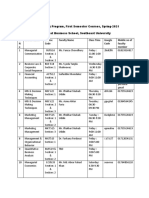
- SL N o Course Name Course Code Faculty Name Class Time Google Code Mobile No of Faculty MemberDocument2 paginiSL N o Course Name Course Code Faculty Name Class Time Google Code Mobile No of Faculty Memberএ.বি.এস. আশিকÎncă nu există evaluări
- Rob Mastrodomenico - The Python Book-John Wiley & Sons (2022)Document259 paginiRob Mastrodomenico - The Python Book-John Wiley & Sons (2022)Slafri Rec BathÎncă nu există evaluări
- Mickey Mouse Clubhouse 1Document4 paginiMickey Mouse Clubhouse 1Dany JacobsÎncă nu există evaluări
- State Bank of India - Personal BankingDocument2 paginiState Bank of India - Personal BankingeSupport GlobalIT Business Solutions LimitedÎncă nu există evaluări
- Ashish Kumar ResumeDocument1 paginăAshish Kumar ResumeNiharika ChowdharyÎncă nu există evaluări
- A100K12023 ITSV-3 Quickguide-ConfigDocument11 paginiA100K12023 ITSV-3 Quickguide-ConfigShanavasÎncă nu există evaluări
- Edif Echo PC Analyzer - Service Manual PDFDocument21 paginiEdif Echo PC Analyzer - Service Manual PDFkartopolloÎncă nu există evaluări
- Intranet, Extranet, Internet: Deepti KhannaDocument47 paginiIntranet, Extranet, Internet: Deepti KhannaGeetanjli SharmaÎncă nu există evaluări
- Livechek: Vehicle Inspection ReportDocument8 paginiLivechek: Vehicle Inspection Reportnilesh chandrakarÎncă nu există evaluări
- Phát triển mô hình KDDocument8 paginiPhát triển mô hình KDPhan Thao VyÎncă nu există evaluări
- Gfps 2724 Manual Series Dryloc PH and Orp Electrodes enDocument12 paginiGfps 2724 Manual Series Dryloc PH and Orp Electrodes enOmar GuillenÎncă nu există evaluări
- Strategi Serikat Pekerja Ditengah Industri 4.0: Bhima Yudhistira AdhinegaraDocument17 paginiStrategi Serikat Pekerja Ditengah Industri 4.0: Bhima Yudhistira AdhinegaraAhmad MustajibÎncă nu există evaluări
- MultitelDocument27 paginiMultitelŽeljko60% (5)
- The ROI of 3D Printing: Ultimaker White PaperDocument13 paginiThe ROI of 3D Printing: Ultimaker White PaperDarko LesoskiÎncă nu există evaluări
- Chap02 - 1 - Nonlinear Equs - BisectionFalse-PositionDocument35 paginiChap02 - 1 - Nonlinear Equs - BisectionFalse-PositionaliÎncă nu există evaluări
- Castro, Rommel M. Bscrim 1cDocument2 paginiCastro, Rommel M. Bscrim 1cZrusty ZimonÎncă nu există evaluări
- Balloon Scale: Air Has Weight: Objective: Materials: ProcedureDocument9 paginiBalloon Scale: Air Has Weight: Objective: Materials: ProcedureDaoud KhanÎncă nu există evaluări
- Al-Amara 4 X 125Mw 9E: Spare Part List For Erection, Commissioning, and Start-UpDocument8 paginiAl-Amara 4 X 125Mw 9E: Spare Part List For Erection, Commissioning, and Start-UpElias Abu FakherÎncă nu există evaluări
- Hose Management Guide: SN: 4AR Lines Group - LubricationDocument52 paginiHose Management Guide: SN: 4AR Lines Group - LubricationNY DanyÎncă nu există evaluări
- Annex I - Functional Requirements - Digital KioskDocument18 paginiAnnex I - Functional Requirements - Digital KioskGisela DuarteÎncă nu există evaluări
- Install Cacti Network Monitoring Tool On CentOS 6.4 - RHEL 6.4 - Scientific Linux 6Document12 paginiInstall Cacti Network Monitoring Tool On CentOS 6.4 - RHEL 6.4 - Scientific Linux 6AymenÎncă nu există evaluări
- 1.62 How To Handle Advance Purchase Bookings PDFDocument1 pagină1.62 How To Handle Advance Purchase Bookings PDFsÎncă nu există evaluări
- Vacancy AnnouncementDocument2 paginiVacancy AnnouncementSoe Zar Ni KyawÎncă nu există evaluări
- FSeries - RevA - OS 4.0.0Document244 paginiFSeries - RevA - OS 4.0.0Eraldo HofelmannÎncă nu există evaluări
- Lecture 4 - 6 - Analysis of Bell Coleman CycleDocument14 paginiLecture 4 - 6 - Analysis of Bell Coleman CycleINDIAN SHARMAÎncă nu există evaluări
- Foundation Year Applications 2.0 LaunchDocument17 paginiFoundation Year Applications 2.0 LaunchStace IÎncă nu există evaluări
- Management Accounting 9th Edition Ebook PDFDocument89 paginiManagement Accounting 9th Edition Ebook PDFbrandy.peloquin968Încă nu există evaluări