S-ar putea să vă placă și
- Additional Topics in Variance Analysis: True / False QuestionsDocument232 paginiAdditional Topics in Variance Analysis: True / False QuestionsElaine GimarinoÎncă nu există evaluări
- Tormax Automatic Sensor 7501Document12 paginiTormax Automatic Sensor 7501name familyÎncă nu există evaluări
- PalmistryDocument115 paginiPalmistryverne4444100% (3)
- Lab Manual.15 PDFDocument34 paginiLab Manual.15 PDFBoovarahan ChakravarthyÎncă nu există evaluări
- VOLVO EC360C HR EC360CHR EXCAVATOR Service Repair Manual PDFDocument19 paginiVOLVO EC360C HR EC360CHR EXCAVATOR Service Repair Manual PDFfjjsjekdmme0% (1)
- Positioning by Global Positioning SystemDocument56 paginiPositioning by Global Positioning SystemSagar Ranabhat100% (1)
- Satellite NavigationDocument30 paginiSatellite Navigationzakiannuar100% (1)
- Principle of Functioning of DGPS & ETSDocument64 paginiPrinciple of Functioning of DGPS & ETSseshukvs100% (1)
- Notes On Satellite Navigation System-1Document11 paginiNotes On Satellite Navigation System-1Md Monir HossainÎncă nu există evaluări
- SELEX Galileo (Italy) - Jane's Air Traffic ControlDocument2 paginiSELEX Galileo (Italy) - Jane's Air Traffic Controlsaaz77Încă nu există evaluări
- Gps Seminar ReportDocument13 paginiGps Seminar ReportRAJESH KAMBOJÎncă nu există evaluări
- Spread Spectrum and CDMA: Principles and ApplicationsDe la EverandSpread Spectrum and CDMA: Principles and ApplicationsÎncă nu există evaluări
- GPS SignalsDocument23 paginiGPS SignalsDheerajKaushalÎncă nu există evaluări
- GPSDocument209 paginiGPSFergus FernÎncă nu există evaluări
- GPS BasicsDocument107 paginiGPS BasicsIsraa Omar100% (1)
- Elements of RF Link DesignDocument157 paginiElements of RF Link DesignDr. Surendra Pal100% (1)
- Railway OFC TrainingDocument17 paginiRailway OFC TrainingSreerup ChowdhuryÎncă nu există evaluări
- 07 InvertedPendulumSystemDocument10 pagini07 InvertedPendulumSystembgizachewÎncă nu există evaluări
- Global Positioning System (GPS)Document21 paginiGlobal Positioning System (GPS)Rahul Sharma100% (1)
- Gps Receiver Design TutorialDocument3 paginiGps Receiver Design TutorialPete100% (1)
- (Ebook - Electronics) Understanding The GPS - An IntroductioDocument264 pagini(Ebook - Electronics) Understanding The GPS - An IntroductioSteven100% (2)
- Tutorial GPS Receiver Architectures - Front-End and Baseband Signal ProcessingDocument18 paginiTutorial GPS Receiver Architectures - Front-End and Baseband Signal Processinggaurav kumar100% (1)
- Antenna Look Angles LecDocument17 paginiAntenna Look Angles LecWaheeb ButtÎncă nu există evaluări
- Principles of GPSDocument11 paginiPrinciples of GPSWong_Hong_Wei100% (1)
- Radar Transmitters and 2Document8 paginiRadar Transmitters and 2mas3565560Încă nu există evaluări
- Satellite Communication NotesDocument5 paginiSatellite Communication NotesshahidaffanÎncă nu există evaluări
- Radar CommunicationDocument12 paginiRadar CommunicationaushaaÎncă nu există evaluări
- Satellite CommunicationDocument114 paginiSatellite CommunicationNuthal SrinivasanÎncă nu există evaluări
- Radar Basic PrinciplesDocument51 paginiRadar Basic PrinciplesDavid Henry SantosÎncă nu există evaluări
- Future Global Navigation Satellite Systems (GNSS) : Nawzad Kameran Al-Salihi, PHDDocument14 paginiFuture Global Navigation Satellite Systems (GNSS) : Nawzad Kameran Al-Salihi, PHDodcardozoÎncă nu există evaluări
- An Overview of The GSM SystemDocument32 paginiAn Overview of The GSM System0796105632Încă nu există evaluări
- FA100 BrochureDocument6 paginiFA100 BrochureUFUKKK100% (1)
- III. Space SegmentDocument45 paginiIII. Space SegmentSai Teja100% (3)
- Cygnus 517Document125 paginiCygnus 517nitin chaurasia0% (2)
- Unit-4 Tracking RadarDocument58 paginiUnit-4 Tracking RadarMani PrinceÎncă nu există evaluări
- DSP Lab Manual Upto 3 Cycles PDFDocument45 paginiDSP Lab Manual Upto 3 Cycles PDFDinesh PalavalasaÎncă nu există evaluări
- LOGIC & DISTRIBUTED CONTROL SYSTEM S7 AE B.Tech May 2019Document1 paginăLOGIC & DISTRIBUTED CONTROL SYSTEM S7 AE B.Tech May 2019Glan DevadhasÎncă nu există evaluări
- Space Segment & Satellite Link DesignDocument123 paginiSpace Segment & Satellite Link DesignvenugopalÎncă nu există evaluări
- EEE 231 CoursecontentDocument3 paginiEEE 231 Coursecontentfakiha11Încă nu există evaluări
- Robot SensorDocument28 paginiRobot SensorJillianne Padillo100% (1)
- Arduino Based Vehicle Tracking System Using GPS &Document17 paginiArduino Based Vehicle Tracking System Using GPS &Auto squadÎncă nu există evaluări
- Automotive Radar Target Tracking by Kalman FilteringDocument4 paginiAutomotive Radar Target Tracking by Kalman FilteringAndreiÎncă nu există evaluări
- Antenna and PropagationDocument43 paginiAntenna and PropagationMeghali Borle100% (1)
- Satellite TutorialDocument2 paginiSatellite Tutorialtarunch89100% (1)
- Military College of Signals (Nust)Document5 paginiMilitary College of Signals (Nust)saadmcsÎncă nu există evaluări
- NSC-18 SME 14jan WEB PDFDocument146 paginiNSC-18 SME 14jan WEB PDFadavit73100% (1)
- Digital To Digital and Digital To Analog ConversionDocument58 paginiDigital To Digital and Digital To Analog ConversionSamavia KhanÎncă nu există evaluări
- CMC Unit-IDocument30 paginiCMC Unit-Iabhi1984_luckyÎncă nu există evaluări
- Simultaneous Localization and Mapping For Robot MappingDocument4 paginiSimultaneous Localization and Mapping For Robot Mappingniranjan_187Încă nu există evaluări
- How GSM WorksDocument24 paginiHow GSM Workssifatb90% (10)
- Millimicrosecond Pulse Techniques: International Series of Monographs on Electronics and InstrumentationDe la EverandMillimicrosecond Pulse Techniques: International Series of Monographs on Electronics and InstrumentationÎncă nu există evaluări
- Global Positioning System: Introduction ToDocument58 paginiGlobal Positioning System: Introduction ToYasir Malik0% (1)
- Seminar On GPS: By, PruthwinDocument24 paginiSeminar On GPS: By, PruthwinPruthwinÎncă nu există evaluări
- CE-321 Gps - Slides - EtcDocument129 paginiCE-321 Gps - Slides - EtcShubham BansalÎncă nu există evaluări
- 10 - GpsDocument19 pagini10 - GpsghadasalahÎncă nu există evaluări
- Global Navigation Satellite System (GNSS) : Group ViiDocument16 paginiGlobal Navigation Satellite System (GNSS) : Group ViiRezie Dampog DellavaÎncă nu există evaluări
- Outline: Combining GPS & Cellular Network Measurements For PositioningDocument9 paginiOutline: Combining GPS & Cellular Network Measurements For PositioningMuhammad Niyas N SÎncă nu există evaluări
- How Gps WorksDocument20 paginiHow Gps WorksMustaf MohamedÎncă nu există evaluări
- ECB 2243-06-GPS-NezaDocument39 paginiECB 2243-06-GPS-NezalathavikneswariÎncă nu există evaluări
- Global Positioning System (GPS)Document37 paginiGlobal Positioning System (GPS)Er Amit AryaÎncă nu există evaluări
- Electronic Navigation: Lesson-6a: Satellite NavigationDocument159 paginiElectronic Navigation: Lesson-6a: Satellite NavigationErcan Yüksekyıldız0% (1)
- Principles of GPS: Prof. M R Sivaraman 1 January 2019 Fifth Talk of The Webinar A Course of GeodesyDocument51 paginiPrinciples of GPS: Prof. M R Sivaraman 1 January 2019 Fifth Talk of The Webinar A Course of GeodesyPrasanna NaikÎncă nu există evaluări
- CVL111 LM2 5Document20 paginiCVL111 LM2 5GoggiÎncă nu există evaluări
- Seminar On GPS: Part I Working of GPS/DGPS Part II Programming of GPSDocument43 paginiSeminar On GPS: Part I Working of GPS/DGPS Part II Programming of GPSNitesh KumarÎncă nu există evaluări
- Avleen GPS 2Document27 paginiAvleen GPS 2saabi singhÎncă nu există evaluări
- Installation Manual MaldivesDocument23 paginiInstallation Manual MaldivesutaiuliancatalinÎncă nu există evaluări
- Employee Quality Awareness Training: Presented byDocument11 paginiEmployee Quality Awareness Training: Presented byJayant Kumar JhaÎncă nu există evaluări
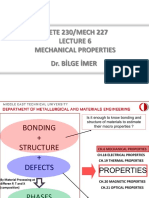
- METE 230/MECH 227 Mechanical Properties Dr. Bilge İmerDocument73 paginiMETE 230/MECH 227 Mechanical Properties Dr. Bilge İmerAlpÎncă nu există evaluări
- Contoh Penjajaran KonstrukDocument8 paginiContoh Penjajaran Konstrukcahaya zinnirahÎncă nu există evaluări
- LXE10E - A12 (Part Lis)Document50 paginiLXE10E - A12 (Part Lis)Manuel Alejandro Pontio RamirezÎncă nu există evaluări
- Numerical Aperture of The Optical FiberDocument4 paginiNumerical Aperture of The Optical FiberSarthak KathpaliaÎncă nu există evaluări
- Confirmation BiasDocument3 paginiConfirmation BiasmuitsÎncă nu există evaluări
- Qualifying Exam Study Guide 01-26-2018Document20 paginiQualifying Exam Study Guide 01-26-2018Abella, Marilou R. (marii)Încă nu există evaluări
- Eisi - Company & Product Profile (2022)Document29 paginiEisi - Company & Product Profile (2022)Loui BarciaÎncă nu există evaluări
- Efficacy of Pendimethalin and Cyhalofop-Butyl + Penoxsulam Against Major Grass Weeds of Direct-Seeded RiceDocument5 paginiEfficacy of Pendimethalin and Cyhalofop-Butyl + Penoxsulam Against Major Grass Weeds of Direct-Seeded RiceGovindaraj KamarajÎncă nu există evaluări
- Week15 1 Nov PDFDocument137 paginiWeek15 1 Nov PDFdas_622426686Încă nu există evaluări
- Keenan Et Al, 2013Document5 paginiKeenan Et Al, 2013Marcela LúciaÎncă nu există evaluări
- Cochlear Implant Brand Comparison Latest Models OnlyDocument26 paginiCochlear Implant Brand Comparison Latest Models OnlyCorina Ruiz ParedesÎncă nu există evaluări
- Very Good Paper On Dual Polarized AntennaDocument14 paginiVery Good Paper On Dual Polarized AntennaHAPURÎncă nu există evaluări
- Grinding Machine - WikipediaDocument6 paginiGrinding Machine - WikipediaWamara CalebÎncă nu există evaluări
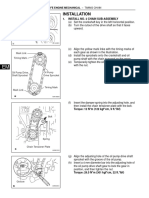
- Sincronizacion de Motor Toyota 2az-FeDocument12 paginiSincronizacion de Motor Toyota 2az-FeWilliams NavasÎncă nu există evaluări
- Conventional As Well As Emerging Arsenic Removal Technologies - A Critical ReviewDocument21 paginiConventional As Well As Emerging Arsenic Removal Technologies - A Critical ReviewQuea ApurimacÎncă nu există evaluări
- WAP To Find The Sum of The Series S 1 + (3/2!) + (5/3!) + (7/4!) + ....... To NDocument8 paginiWAP To Find The Sum of The Series S 1 + (3/2!) + (5/3!) + (7/4!) + ....... To NSOUMYA MAHAPATRAÎncă nu există evaluări
- Introduction To Industry 4.0 and Industrial IoT Week 3 Quiz SolutionsDocument5 paginiIntroduction To Industry 4.0 and Industrial IoT Week 3 Quiz SolutionssathyaÎncă nu există evaluări
- Pengaruh Skarifikasi Dan Hormon Giberelin (Ga) Terhadap Daya Kecambah Dan Pertumbuhan Bibit Palem Putri (Veitchia Merillii)Document8 paginiPengaruh Skarifikasi Dan Hormon Giberelin (Ga) Terhadap Daya Kecambah Dan Pertumbuhan Bibit Palem Putri (Veitchia Merillii)Adi IndraÎncă nu există evaluări
- Floatind RCC Solar Brochure - CompressedDocument1 paginăFloatind RCC Solar Brochure - Compressedsinghharsha1307Încă nu există evaluări
- Harrison PDFDocument30 paginiHarrison PDFFlorina AnichitoaeÎncă nu există evaluări
- Data Science Assignment 01Document4 paginiData Science Assignment 01Abdul MAalikÎncă nu există evaluări
- H.A.S-21-01-S.G (Supply and Erection) -محولDocument5 paginiH.A.S-21-01-S.G (Supply and Erection) -محولnabil beboÎncă nu există evaluări
- TFM Ferespe CarolinaGuimaraes FINALDocument60 paginiTFM Ferespe CarolinaGuimaraes FINALAdnanÎncă nu există evaluări