S-ar putea să vă placă și
- Usar El Generador de Expresiones - Access 2013 - OfficeDocument3 paginiUsar El Generador de Expresiones - Access 2013 - OfficeAlberto Diaz PerezÎncă nu există evaluări
- Investigacion Sistemas Operativos RedDocument8 paginiInvestigacion Sistemas Operativos RedHugo Alejandro Garcia Alva67% (3)
- Programa de AuditoriaDocument12 paginiPrograma de AuditoriaJuan Velin JaraÎncă nu există evaluări
- Cuadernillo de AprendizajeDocument38 paginiCuadernillo de AprendizajeNancy CaballeroÎncă nu există evaluări
- Kriging Indicador FghjjooiuDocument16 paginiKriging Indicador FghjjooiuZimplementeLuizitha XDÎncă nu există evaluări
- Herramientas Kali LinuxDocument27 paginiHerramientas Kali LinuxGuillermo Valencia100% (1)
- Organización de Las TeclasDocument3 paginiOrganización de Las TeclasalticoruÎncă nu există evaluări
- ArchiCAD y Modelamos Como ConstruimosDocument9 paginiArchiCAD y Modelamos Como ConstruimosMelissa ButlerÎncă nu există evaluări
- Políticas S@mi o Mesa AyudaDocument4 paginiPolíticas S@mi o Mesa AyudaHuberto GiraldoÎncă nu există evaluări
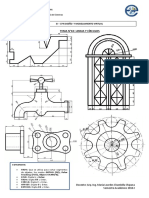
- Si - 374 Tema 02 - Lineas y Circulos CadDocument4 paginiSi - 374 Tema 02 - Lineas y Circulos CadoscarÎncă nu există evaluări
- FBMSemestral - Agencia Nacional de Mineria ColombiaDocument63 paginiFBMSemestral - Agencia Nacional de Mineria ColombiaAlexandra GomezÎncă nu există evaluări
- Xbox 360 Slim3Document15 paginiXbox 360 Slim3Felipe Vargas100% (2)
- Auricular InalambricoDocument2 paginiAuricular InalambricoCiro Miguel Anaya CotrinaÎncă nu există evaluări
- Funciones Oracle SQLDocument41 paginiFunciones Oracle SQLRicardo Pezo CortésÎncă nu există evaluări
- Diez Recomendaciones para Maquetar Con InDesign - GrafimeDocument3 paginiDiez Recomendaciones para Maquetar Con InDesign - GrafimeKeryn Shehito Aguirre HuanhuayoÎncă nu există evaluări
- TP Criptografía ClásicaDocument6 paginiTP Criptografía ClásicaMauro BergeroÎncă nu există evaluări
- Evaluación tiempos acumulados SAPDocument5 paginiEvaluación tiempos acumulados SAPNorys VivasÎncă nu există evaluări
- Software de Diagnostico y MantenimientoDocument6 paginiSoftware de Diagnostico y MantenimientoAriadnaCrowleyFairchild0% (1)
- Suma de Números BinariosDocument3 paginiSuma de Números BinariosJohanValdezÎncă nu există evaluări
- Ética InformáticaDocument16 paginiÉtica Informáticaaracelisquijada100% (1)
- Dark CometDocument3 paginiDark Cometblues_fairyÎncă nu există evaluări
- EjerciciosDocument16 paginiEjerciciosrosveronÎncă nu există evaluări
- Kick OffDocument14 paginiKick OffOlta Aldo OltaÎncă nu există evaluări
- Curso de Programación de Macros en Excel2Document188 paginiCurso de Programación de Macros en Excel2Marcelo Mendoza SaldañaÎncă nu există evaluări
- Terminales MovilesDocument15 paginiTerminales MovilesJosue HerreraÎncă nu există evaluări
- Estandar 5.02 Norma BASCDocument5 paginiEstandar 5.02 Norma BASCKelwin Velasquez ZapataÎncă nu există evaluări
- CartaPoderNivelesDocument2 paginiCartaPoderNivelesLuis Antonio Requena Arroyo100% (1)
- Casos de FactorizaciónDocument9 paginiCasos de FactorizaciónJJRC1979Încă nu există evaluări
- CurpDocument1 paginăCurpnallelyÎncă nu există evaluări
- Password CrackingDocument9 paginiPassword CrackingErick NoboaÎncă nu există evaluări