S-ar putea să vă placă și
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5795)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1091)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
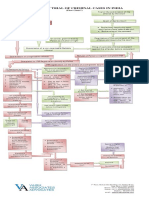
- Process of Trial of Criminal Cases in India (Flow Chart)Document1 paginăProcess of Trial of Criminal Cases in India (Flow Chart)Arun Hiro100% (1)
- Oracle Database 12c r2 Administration Workshop Ed 3Document7 paginiOracle Database 12c r2 Administration Workshop Ed 3Firas ChaabeneÎncă nu există evaluări
- AWSCertifiedBigDataSlides PDFDocument414 paginiAWSCertifiedBigDataSlides PDFUtsav PatelÎncă nu există evaluări
- List - of - Members As On 6 3 18 PDFDocument8 paginiList - of - Members As On 6 3 18 PDFashish jaiswal100% (1)
- Security Operating Procedures and StandardsDocument5 paginiSecurity Operating Procedures and StandardsQuy Tranxuan100% (2)
- A Comparative Study of Intelligence in Children of Consanguineous and Non-Consanguineous Marriages and Its Relationship With Holland's Personality Types in High School Students of TehranDocument8 paginiA Comparative Study of Intelligence in Children of Consanguineous and Non-Consanguineous Marriages and Its Relationship With Holland's Personality Types in High School Students of TehranInternational Medical PublisherÎncă nu există evaluări
- ECAT STD 2 Sample Question PaperDocument7 paginiECAT STD 2 Sample Question PaperVinay Jindal0% (1)
- Homa Pump Catalog 2011Document1.089 paginiHoma Pump Catalog 2011themejia87Încă nu există evaluări
- Dragon Is The Fifth in The 12Document3 paginiDragon Is The Fifth in The 12Waylon CahiligÎncă nu există evaluări
- People in OrganisationsDocument8 paginiPeople in OrganisationsBritney valladares100% (1)
- Design, Modelling & Analysis of High Energy Safety Impact Guard For Heavy Duty VehicleDocument10 paginiDesign, Modelling & Analysis of High Energy Safety Impact Guard For Heavy Duty VehicleIJRASETPublicationsÎncă nu există evaluări
- Analytical ReasoningDocument7 paginiAnalytical ReasoningKashif NadeemÎncă nu există evaluări
- MAELLT Brochure 2006-1Document2 paginiMAELLT Brochure 2006-1Ryan Glenn Cedan CondaÎncă nu există evaluări
- Juzaili Alias SSB Jadual Perubahan PDP Dan Penilaian AlternatifDocument1 paginăJuzaili Alias SSB Jadual Perubahan PDP Dan Penilaian Alternatifkar afiÎncă nu există evaluări
- Wp406 DSP Design ProductivityDocument14 paginiWp406 DSP Design ProductivityStar LiÎncă nu există evaluări
- Tutorial Letter 101/3/2019: Financial Accounting For CompaniesDocument35 paginiTutorial Letter 101/3/2019: Financial Accounting For CompaniesPhebieon MukwenhaÎncă nu există evaluări
- Programming Essentials in PythonDocument23 paginiProgramming Essentials in PythonNabeel AmjadÎncă nu există evaluări
- Articles of IncorporationDocument2 paginiArticles of IncorporationLegal Forms100% (1)
- MahoyoDocument6 paginiMahoyoChriz HunterÎncă nu există evaluări
- The Value Relevance of Financial Statements and Their Impact On Stock PricesDocument18 paginiThe Value Relevance of Financial Statements and Their Impact On Stock Pricesanubha srivastavaÎncă nu există evaluări
- Guide Item Dota 2Document11 paginiGuide Item Dota 2YogaWijayaÎncă nu există evaluări
- Anthony D. Slonim, Murray M. Pollack Pediatric Critical Care Medicine PDFDocument950 paginiAnthony D. Slonim, Murray M. Pollack Pediatric Critical Care Medicine PDFAnca DumitruÎncă nu există evaluări
- MCQ Class VDocument9 paginiMCQ Class VSneh MahajanÎncă nu există evaluări
- Mca Lawsuit Details English From 2007 To Feb 2021Document2 paginiMca Lawsuit Details English From 2007 To Feb 2021api-463871923Încă nu există evaluări
- Fig. 6.14 Circular WaveguideDocument16 paginiFig. 6.14 Circular WaveguideThiagu RajivÎncă nu există evaluări
- Click To Enlarge (The Skeptic's Annotated Bible, Hosea)Document11 paginiClick To Enlarge (The Skeptic's Annotated Bible, Hosea)Philip WellsÎncă nu există evaluări
- Microwave Oven: Instructions & Cooking GuideDocument38 paginiMicrowave Oven: Instructions & Cooking GuidethomaselandÎncă nu există evaluări
- Jaringan Noordin M. TopDocument38 paginiJaringan Noordin M. TopgiantoÎncă nu există evaluări
- The Wilderness - Chennai TimesDocument1 paginăThe Wilderness - Chennai TimesNaveenÎncă nu există evaluări
- Way of St. LouiseDocument18 paginiWay of St. LouiseMaryann GuevaradcÎncă nu există evaluări