S-ar putea să vă placă și
- Swarm Intelligence For Local Transit Revised 123Document24 paginiSwarm Intelligence For Local Transit Revised 123amitdhakateÎncă nu există evaluări
- Neural Network Modeling and Identification of Dynamical SystemsDe la EverandNeural Network Modeling and Identification of Dynamical SystemsÎncă nu există evaluări
- Data Mining Approaches For Intrusion Detection: Wenke Lee and Salvatore J. StolfoDocument62 paginiData Mining Approaches For Intrusion Detection: Wenke Lee and Salvatore J. StolfoMradul DhakarÎncă nu există evaluări
- Simulation and Modeling CT-4211 3-2-3: Prepared By: Desalegn Mesfin (Maj.)Document18 paginiSimulation and Modeling CT-4211 3-2-3: Prepared By: Desalegn Mesfin (Maj.)Hussein Turi HtgÎncă nu există evaluări
- An Introduction To Swarm Robotics - A.martinoli - Tutorial - SlidesDocument97 paginiAn Introduction To Swarm Robotics - A.martinoli - Tutorial - SlidesAnonymous nXvsJHÎncă nu există evaluări
- Swarm Intelligence: Corey Fehr Merle Good Shawn Keown Gordon FedoriwDocument51 paginiSwarm Intelligence: Corey Fehr Merle Good Shawn Keown Gordon FedoriwRoshini RomeoÎncă nu există evaluări
- Presented by Parvinder Singh Palak Bhatia Laxmi Suri: "The Power of Simplicity"Document39 paginiPresented by Parvinder Singh Palak Bhatia Laxmi Suri: "The Power of Simplicity"Laxmi SuriÎncă nu există evaluări
- Swarm Computing & Routing Algorithms: Dr. Mikhail Nesterenko Presented by Ibrahim MotiwalaDocument25 paginiSwarm Computing & Routing Algorithms: Dr. Mikhail Nesterenko Presented by Ibrahim Motiwala정원섭Încă nu există evaluări
- Intrusion Detection: Jie LinDocument34 paginiIntrusion Detection: Jie LinAjmal QalaÎncă nu există evaluări
- Computer Simulation and Applications in Life Sciences: Dr. Michael Emmerich & Dr. Andre Deutz LiacsDocument37 paginiComputer Simulation and Applications in Life Sciences: Dr. Michael Emmerich & Dr. Andre Deutz LiacsperezismaelÎncă nu există evaluări
- Building Intelligent MachinesDocument26 paginiBuilding Intelligent MachinesChetan SurpurÎncă nu există evaluări
- Swarm Intelligence: From Natural To Artificial SystemsDocument42 paginiSwarm Intelligence: From Natural To Artificial SystemsneuralterapianetÎncă nu există evaluări
- Lecture 1Document38 paginiLecture 1Cynthia ReginaÎncă nu există evaluări
- CT002-3-2 AI Methods: Swarm Intelligence, Technique and Application-IDocument28 paginiCT002-3-2 AI Methods: Swarm Intelligence, Technique and Application-IChester ChongÎncă nu există evaluări
- Lecture 1Document38 paginiLecture 1Cynthia ReginaÎncă nu există evaluări
- cs621 Lect7 SI 13aug07Document47 paginics621 Lect7 SI 13aug07xiditoÎncă nu există evaluări
- 2011 0006.advanced EvolutionaryDocument76 pagini2011 0006.advanced EvolutionaryKARANÎncă nu există evaluări
- Swarm Intelligence For BeginnersDocument20 paginiSwarm Intelligence For Beginnersankita dablaÎncă nu există evaluări
- END 306 Simulation: Week 1Document28 paginiEND 306 Simulation: Week 1Pinar UganÎncă nu există evaluări
- Swarm Intelligence (SI)Document34 paginiSwarm Intelligence (SI)Subbu SuniÎncă nu există evaluări
- Swarm Intelligence PSO and ACODocument69 paginiSwarm Intelligence PSO and ACOKrishna Reddy KondaÎncă nu există evaluări
- Bio Inspired Networking: Prepared By: Kratika JaiswalDocument15 paginiBio Inspired Networking: Prepared By: Kratika JaiswaldarbarÎncă nu există evaluări
- Simulation Models As A Research Method: Professor Alexander SettlesDocument27 paginiSimulation Models As A Research Method: Professor Alexander Settlesrajforever17Încă nu există evaluări
- Course Structure: K S Rajan IIIT HyderabadDocument2 paginiCourse Structure: K S Rajan IIIT Hyderabadmonica_804238794Încă nu există evaluări
- Week 4 Applications of ML in SecurityDocument36 paginiWeek 4 Applications of ML in SecurityAsfand KhalidÎncă nu există evaluări
- Intelligent Systems and Robotics - 1Document21 paginiIntelligent Systems and Robotics - 1chirag pandeyÎncă nu există evaluări
- Application of Artificial Intelligence For The Development AfricaDocument20 paginiApplication of Artificial Intelligence For The Development AfricaFlorence KatonjeÎncă nu există evaluări
- Self-Organization in Autonomous Sensor/Actuator Networks (Selforg)Document45 paginiSelf-Organization in Autonomous Sensor/Actuator Networks (Selforg)akshay_23Încă nu există evaluări
- Introduction & Fundamentals: - Part I: Introduction - Part II: Fundamental Concepts - Part III: Classification LabDocument50 paginiIntroduction & Fundamentals: - Part I: Introduction - Part II: Fundamental Concepts - Part III: Classification LabbhanumanuÎncă nu există evaluări
- University of Gondar: System Modeling and SimulationDocument30 paginiUniversity of Gondar: System Modeling and SimulationDag TÎncă nu există evaluări
- Automated SystemsDocument5 paginiAutomated SystemscollenÎncă nu există evaluări
- Intrusion Detection: Jie LinDocument34 paginiIntrusion Detection: Jie LinNitin RoyÎncă nu există evaluări
- Swarm IntelligenceDocument37 paginiSwarm IntelligenceSamuel JohnsonÎncă nu există evaluări
- Auto AnlyzingDocument78 paginiAuto AnlyzingGanesh VignaniÎncă nu există evaluări
- Warm Ntelligence: Calm. We Are Going Around The LeafDocument32 paginiWarm Ntelligence: Calm. We Are Going Around The Leafsaurabhmittal2005Încă nu există evaluări
- Robotics 5Document50 paginiRobotics 5setsindia3735Încă nu există evaluări
- SystemDocument2 paginiSystemHaris ShahidÎncă nu există evaluări
- Nature Inspired Computing: Recent Research Scenario: Dr. Sanjay SainiDocument31 paginiNature Inspired Computing: Recent Research Scenario: Dr. Sanjay SainilaxmikantÎncă nu există evaluări
- Kavita Singh Cs-A 0509710047Document37 paginiKavita Singh Cs-A 0509710047kavita8642100% (2)
- Concurrent Systems 1Document83 paginiConcurrent Systems 1Eduardo MacetasÎncă nu există evaluări
- Discrete Event Simulation Book by Jerry BanksDocument325 paginiDiscrete Event Simulation Book by Jerry BanksAditya Dhal75% (4)
- Automation 151203160733 Lva1 App6892Document78 paginiAutomation 151203160733 Lva1 App6892miesoabdela57Încă nu există evaluări
- Unit 5: Advanced Optimization Techniques (M.Tech)Document10 paginiUnit 5: Advanced Optimization Techniques (M.Tech)tsnrao30Încă nu există evaluări
- Data Mining With An Ant Colony Optimization Algorithm: Rafael S. Parpinelli, Heitor S. Lopes, and Alex A. FreitasDocument29 paginiData Mining With An Ant Colony Optimization Algorithm: Rafael S. Parpinelli, Heitor S. Lopes, and Alex A. FreitasPaulo SuchojÎncă nu există evaluări
- The Ant Colony Optimization (ACO) Metaheuristic: A Swarm Intelligence Framework For Complex Optimization TasksDocument64 paginiThe Ant Colony Optimization (ACO) Metaheuristic: A Swarm Intelligence Framework For Complex Optimization TasksJeovania LopesÎncă nu există evaluări
- Legal Issues On RoboticsDocument52 paginiLegal Issues On RoboticsIrene KafezaÎncă nu există evaluări
- Theo SimuDocument12 paginiTheo Simuhung nguyenÎncă nu există evaluări
- Introduction To Simulation and ModellingDocument45 paginiIntroduction To Simulation and Modellingabeni mesfinÎncă nu există evaluări
- Chapter 1 PDFDocument35 paginiChapter 1 PDFAreeba AshrafÎncă nu există evaluări
- Seminar Presentation On CyberneticsDocument29 paginiSeminar Presentation On CyberneticsBhagyashree Shejwal Bhagat80% (5)
- 17 Preventing and Responding To IncidentsDocument95 pagini17 Preventing and Responding To Incidentsarlin aringoÎncă nu există evaluări
- ECE 453 - CS 447 - SE 465 Software Testing & Quality AssuranceDocument26 paginiECE 453 - CS 447 - SE 465 Software Testing & Quality Assuranceumar farooqÎncă nu există evaluări
- Chapter 5Document72 paginiChapter 5megzgreatÎncă nu există evaluări
- Lec 1 - 2 Intr To ModelingDocument39 paginiLec 1 - 2 Intr To ModelingHaroon SaeedÎncă nu există evaluări
- CT002-3-2 AI Methods: Swarm Intelligence, Technique and application-IIDocument29 paginiCT002-3-2 AI Methods: Swarm Intelligence, Technique and application-IIChester ChongÎncă nu există evaluări
- Ant Colony OptimizationDocument13 paginiAnt Colony Optimizationjaved765100% (1)
- CMP264 Systems Analysis and DesignDocument3 paginiCMP264 Systems Analysis and DesignAdah Sylvester EliasÎncă nu există evaluări
- ARDM 3 Fina 2017 PDFDocument139 paginiARDM 3 Fina 2017 PDFDavid Esteban Meneses RendicÎncă nu există evaluări
- Topic 1 Introduction To Modeling & SimulationDocument28 paginiTopic 1 Introduction To Modeling & SimulationMustafa IbrahimÎncă nu există evaluări
- ASTM E407-07 Standard Practice For Microetching Metals and AlloysDocument22 paginiASTM E407-07 Standard Practice For Microetching Metals and AlloysRifqiMahendraPutra100% (3)
- db2 Fundamentals Aix PDFDocument503 paginidb2 Fundamentals Aix PDFpndeepika50% (2)
- Crusher House OperationDocument21 paginiCrusher House Operationratan das0% (1)
- CH12-Inventory Management PoliciesDocument32 paginiCH12-Inventory Management PoliciesChristian John Linalcoso AranteÎncă nu există evaluări
- QED Chapter 11Document99 paginiQED Chapter 11Andrew HucekÎncă nu există evaluări
- Solid Fuel Boiler Control Standard 2: Version 1.0) Version 1.0) Version 1.0) Version 1.0)Document26 paginiSolid Fuel Boiler Control Standard 2: Version 1.0) Version 1.0) Version 1.0) Version 1.0)Ana Odzaklieska Krste SmileskiÎncă nu există evaluări
- MA WAFLInternals V2.0Document20 paginiMA WAFLInternals V2.0Vimal PalanisamyÎncă nu există evaluări
- Principles of Motion EconomyDocument39 paginiPrinciples of Motion EconomyNikhil GargÎncă nu există evaluări
- Viscous Soft-Soil ModelingDocument10 paginiViscous Soft-Soil ModelinghassscribedÎncă nu există evaluări
- Startup ShutdownDocument4 paginiStartup ShutdownPit_mkluÎncă nu există evaluări
- History: Aviation Is The Practical Aspect or Art ofDocument3 paginiHistory: Aviation Is The Practical Aspect or Art ofEarle J ZaficoÎncă nu există evaluări
- Prequalification HecDocument37 paginiPrequalification HecSaad SarfarazÎncă nu există evaluări
- AMP PIP Test ManualDocument8 paginiAMP PIP Test ManualknjizaraknjigaÎncă nu există evaluări
- Math Samples PDFDocument1 paginăMath Samples PDFArwin VillegasÎncă nu există evaluări
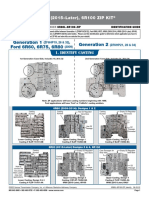
- 6R80L 6R100 Zip inDocument12 pagini6R80L 6R100 Zip inYisus 616Încă nu există evaluări
- 3 - Chemical Thermodynamics and ThermochemistryDocument3 pagini3 - Chemical Thermodynamics and ThermochemistryYawn D ArtistÎncă nu există evaluări
- WM - Railway Gupta and Gupta Book Solution CJDocument125 paginiWM - Railway Gupta and Gupta Book Solution CJAman Mukati100% (2)
- Lower Kalinga District Engineering Office: Republic of The PhilippinesDocument1 paginăLower Kalinga District Engineering Office: Republic of The PhilippinesRheyJun Paguinto AnchetaÎncă nu există evaluări
- 6.chain Pulley BlockDocument2 pagini6.chain Pulley BlockFrancis Vinoj75% (4)
- Eaton70523 553partsDocument20 paginiEaton70523 553partsLeo VanÎncă nu există evaluări
- A Test Tube, 15 MM in Diameter and 15 CM Tall, Hal...Document4 paginiA Test Tube, 15 MM in Diameter and 15 CM Tall, Hal...AliÎncă nu există evaluări
- TTester 1.10k EN 140409-1Document89 paginiTTester 1.10k EN 140409-1Domingo ArroyoÎncă nu există evaluări
- Module 2 - Important Theory Portions: - Friction - Characteristics of FrictionDocument8 paginiModule 2 - Important Theory Portions: - Friction - Characteristics of FrictionHima SÎncă nu există evaluări
- Part II Video Quiz 3 Erie Canal and Pittsburgh Steel Jack Stauber-1Document4 paginiPart II Video Quiz 3 Erie Canal and Pittsburgh Steel Jack Stauber-1jack stauberÎncă nu există evaluări
- Bus Switching Scheme PDFDocument6 paginiBus Switching Scheme PDFJAYKUMAR SINGHÎncă nu există evaluări
- Basic Design of AHU (General)Document64 paginiBasic Design of AHU (General)Dimyati Es100% (5)
- Toyota Truck SequoiaDocument16 paginiToyota Truck SequoiaD3NYÎncă nu există evaluări
- Top Secrets of The VedasDocument54 paginiTop Secrets of The Vedasbiswajit_paulÎncă nu există evaluări
- Parts Manual CB 434dDocument667 paginiParts Manual CB 434dMarceloGago100% (2)
- SLM600V2 ManualDocument25 paginiSLM600V2 Manualbenditasea3352Încă nu există evaluări