S-ar putea să vă placă și
- Thermal Properties of MetalsDocument15 paginiThermal Properties of MetalsShione T MundawararaÎncă nu există evaluări
- Thermal Properties of Materials: - How Does An EngineeringDocument16 paginiThermal Properties of Materials: - How Does An EngineeringShione T MundawararaÎncă nu există evaluări
- Mechanical Properties of MetalsDocument16 paginiMechanical Properties of MetalsShione T MundawararaÎncă nu există evaluări
- APPLIED MECHANICsDocument8 paginiAPPLIED MECHANICsShione T MundawararaÎncă nu există evaluări
- Cabling: Presented by Wisdom, Patsika, GreenDocument31 paginiCabling: Presented by Wisdom, Patsika, GreenShione T MundawararaÎncă nu există evaluări
- Material Science Notes LatestDocument56 paginiMaterial Science Notes LatestShione T MundawararaÎncă nu există evaluări
- Cabling Presentation: by Caleb KandoroDocument18 paginiCabling Presentation: by Caleb KandoroShione T MundawararaÎncă nu există evaluări
- Printing Machinery Maintenance: L' Scheme SyllabusDocument75 paginiPrinting Machinery Maintenance: L' Scheme SyllabusShione T MundawararaÎncă nu există evaluări
- Harmonic Oscillation: Bernoulli's Equation Navigation SearchDocument72 paginiHarmonic Oscillation: Bernoulli's Equation Navigation SearchShione T MundawararaÎncă nu există evaluări
- Atomic StructureDocument14 paginiAtomic StructureShione T MundawararaÎncă nu există evaluări
- Robot Cell DesignDocument18 paginiRobot Cell DesignShione T Mundawarara57% (7)
- Types of MaterialsDocument12 paginiTypes of MaterialsShione T MundawararaÎncă nu există evaluări
- In This ExampleDocument1 paginăIn This ExampleShione T MundawararaÎncă nu există evaluări
- Robot Course OutlineDocument2 paginiRobot Course OutlineShione T MundawararaÎncă nu există evaluări
- Assignment TwoDocument2 paginiAssignment TwoShione T MundawararaÎncă nu există evaluări
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Softening N Penetration Test BitumenDocument11 paginiSoftening N Penetration Test BitumenEdwin LeonÎncă nu există evaluări
- Selling Your Contents To The WorldDocument25 paginiSelling Your Contents To The WorldCreative Malaysia100% (1)
- Understanding Low Voltage Power Distribution SystemsDocument64 paginiUnderstanding Low Voltage Power Distribution SystemsJorge Luis Mallqui Barbaran100% (1)
- Eje Delantero BMW F10Document94 paginiEje Delantero BMW F10Daniel Muñoz SotomayorÎncă nu există evaluări
- An 80-Mg Railroad Engine A Coasting at 6.5 KM - H Strikes A 20Document4 paginiAn 80-Mg Railroad Engine A Coasting at 6.5 KM - H Strikes A 20Aura Milena Martinez ChavarroÎncă nu există evaluări
- 06-901 Keyed Input SwitchesDocument4 pagini06-901 Keyed Input Switchesmajed al.madhajiÎncă nu există evaluări
- Tharmal Analysis BasicsDocument56 paginiTharmal Analysis BasicsNetoÎncă nu există evaluări
- Huawei ACU2 Wireless Access Controller DatasheetDocument12 paginiHuawei ACU2 Wireless Access Controller Datasheetdexater007Încă nu există evaluări
- BSR NH Circle Jaipur 2016Document103 paginiBSR NH Circle Jaipur 2016vikash kumar50% (4)
- Efficia Infant WarmingDocument8 paginiEfficia Infant WarmingNurhidayat MursalinÎncă nu există evaluări
- Unit-II Some PPT NetDocument2 paginiUnit-II Some PPT NetbandisaidaiahÎncă nu există evaluări
- Report On HACCP ManualDocument72 paginiReport On HACCP ManualRizwan KhanÎncă nu există evaluări
- Ball Mill SizingDocument10 paginiBall Mill Sizingvvananth100% (1)
- Prospects For Alkaline Zero Gap Water Electrolysers For Hydrogen ProductionDocument16 paginiProspects For Alkaline Zero Gap Water Electrolysers For Hydrogen Productionkhan47pkÎncă nu există evaluări
- Astm D3359Document9 paginiAstm D3359Angel GuachaminÎncă nu există evaluări
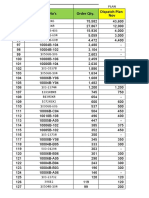
- Order Qty Vs Dispatch Plan - 04 11 20Document13 paginiOrder Qty Vs Dispatch Plan - 04 11 20NPD1 JAKAPÎncă nu există evaluări
- Chapter 19A ConcreteDocument10 paginiChapter 19A ConcreteMofasa EÎncă nu există evaluări
- D 2510 - 94 R98Document3 paginiD 2510 - 94 R98David Cazorla100% (1)
- Gathering Network RequirementsDocument30 paginiGathering Network RequirementsAmin ZangetsuÎncă nu există evaluări
- Coastal DefenceDocument112 paginiCoastal DefenceMorvin BudhanÎncă nu există evaluări
- Service Manual: PhilipsDocument39 paginiService Manual: PhilipsRogerio E. SantoÎncă nu există evaluări
- Nuevo CvuDocument1 paginăNuevo CvuJesús GonzálezÎncă nu există evaluări
- Jerry Hill's Letter To Bijan Sartipi, Director, District 4 CaltransDocument1 paginăJerry Hill's Letter To Bijan Sartipi, Director, District 4 CaltransSabrina BrennanÎncă nu există evaluări
- Teradata Installation: Installation Steps For WindowsDocument4 paginiTeradata Installation: Installation Steps For WindowsjupudiguptaÎncă nu există evaluări
- Dogging Guide 2003 - WorkCover NSWDocument76 paginiDogging Guide 2003 - WorkCover NSWtadeumatas100% (1)
- TD Quintolubric 888 68Document2 paginiTD Quintolubric 888 68Haitham YoussefÎncă nu există evaluări
- Oil & Gas Asset Integrity IssuesDocument15 paginiOil & Gas Asset Integrity Issuesyogolain100% (2)
- Using Dapper Asynchronously inDocument1 paginăUsing Dapper Asynchronously inGiovani BrondaniÎncă nu există evaluări