S-ar putea să vă placă și
- Guide to Load Analysis for Durability in Vehicle EngineeringDe la EverandGuide to Load Analysis for Durability in Vehicle EngineeringP. JohannessonEvaluare: 4 din 5 stele4/5 (1)
- Design and Analysis of Composite Structures for Automotive Applications: Chassis and DrivetrainDe la EverandDesign and Analysis of Composite Structures for Automotive Applications: Chassis and DrivetrainÎncă nu există evaluări
- BumperDocument33 paginiBumperAbhishek VermaÎncă nu există evaluări
- Fulltext01 PDFDocument108 paginiFulltext01 PDFNGÔ THÁI NGỌ THẦYÎncă nu există evaluări
- KISSsoft Tutorial: Installation and First StepsDocument10 paginiKISSsoft Tutorial: Installation and First StepsBilal BaluchÎncă nu există evaluări
- c15 Catia v5r17Document76 paginic15 Catia v5r17Shubham HarleÎncă nu există evaluări
- Manufacturing Processes Measurement GuideDocument25 paginiManufacturing Processes Measurement GuideyamadaÎncă nu există evaluări
- Inventor Gear Fastener TutorialDocument13 paginiInventor Gear Fastener TutorialIRONSAVIORÎncă nu există evaluări
- Glossary of Suspension Terms PDFDocument10 paginiGlossary of Suspension Terms PDFrobinÎncă nu există evaluări
- Iso 128 3 2020 - CompressDocument56 paginiIso 128 3 2020 - CompressRaúlÎncă nu există evaluări
- NX 9 For Manufacturing - What's NewDocument9 paginiNX 9 For Manufacturing - What's NewHoang DHÎncă nu există evaluări
- Oldham CouplingDocument5 paginiOldham CouplingArsh 837Încă nu există evaluări
- Rack and Pinion Steering DesigningDocument19 paginiRack and Pinion Steering DesigningAudrian Louven Realubit Sabado0% (2)
- 2 Gear BasicsDocument6 pagini2 Gear BasicsMohamed Adel RizkÎncă nu există evaluări
- Design and Analysis of Disc Brake and Caliper of Four WheelerDocument5 paginiDesign and Analysis of Disc Brake and Caliper of Four WheelerIJSTEÎncă nu există evaluări
- Tolerance Analysis Methods, Platforms and Trends - Comprehensive OverviewDocument7 paginiTolerance Analysis Methods, Platforms and Trends - Comprehensive Overviewnagmech07Încă nu există evaluări
- Chapter 9 Geometric Dimensioning & Tolerancing (GD&T) : FPOLR-52332Document12 paginiChapter 9 Geometric Dimensioning & Tolerancing (GD&T) : FPOLR-52332Jackie HwangÎncă nu există evaluări
- Kinematic Analysis of McPhersonDocument7 paginiKinematic Analysis of McPhersonznamÎncă nu există evaluări
- 1 58503 283 2 2Document65 pagini1 58503 283 2 2marcelo_adcampÎncă nu există evaluări
- Orientation (GD&T)Document39 paginiOrientation (GD&T)Kishor kumar BhatiaÎncă nu există evaluări
- Calculating Bonus TollDocument4 paginiCalculating Bonus TollkarthiblackÎncă nu există evaluări
- DESIGN - AND - FABRICATION - OF - AUTOMATIC - SPRAY - PAINTING - MACHINE - Ijariie7676 PDFDocument7 paginiDESIGN - AND - FABRICATION - OF - AUTOMATIC - SPRAY - PAINTING - MACHINE - Ijariie7676 PDFHussain MuslimÎncă nu există evaluări
- Classical Kinematis CHP 1-14Document95 paginiClassical Kinematis CHP 1-14kullayot suwantarojÎncă nu există evaluări
- Creating Swept Surfaces-CATIA V5 PDFDocument29 paginiCreating Swept Surfaces-CATIA V5 PDFBorralla Cinza50% (2)
- Design and Optimization of Front Wheel AssemblyDocument69 paginiDesign and Optimization of Front Wheel Assemblynikhil pandkarÎncă nu există evaluări
- Fundamentals of Geometric Dimensioning and Tolerancing by Alex Krulikowski Downloads TorrentDocument3 paginiFundamentals of Geometric Dimensioning and Tolerancing by Alex Krulikowski Downloads TorrentAshok MadhanÎncă nu există evaluări
- Chain Less BicycleDocument46 paginiChain Less BicycleShubham PatilÎncă nu există evaluări
- Ackermann Power SteeringDocument62 paginiAckermann Power SteeringDeepak SawantÎncă nu există evaluări
- The Commercial Vehicle: An IntroductionDocument24 paginiThe Commercial Vehicle: An IntroductionPawan Kumar Gupta100% (1)
- Durability Assessments of Motorcycle Handlebars Ken-Yuan Lin, 2005 XXXXXDocument25 paginiDurability Assessments of Motorcycle Handlebars Ken-Yuan Lin, 2005 XXXXXjaydeepnaruleÎncă nu există evaluări
- BIW - BeadsDocument2 paginiBIW - BeadsArvind97Încă nu există evaluări
- drwing-IIT Que-1 PDFDocument14 paginidrwing-IIT Que-1 PDFNur Alam100% (1)
- Why car lines are used in BIW designDocument2 paginiWhy car lines are used in BIW designasddsffdsfÎncă nu există evaluări
- Static Analysis of A Bycycle FrameDocument24 paginiStatic Analysis of A Bycycle FrameADARSH SINGHÎncă nu există evaluări
- What Is Milling MachineDocument6 paginiWhat Is Milling MachineGlenn VergaraÎncă nu există evaluări
- Auto Noise Vibration Harshness Analysis Full VehicleDocument5 paginiAuto Noise Vibration Harshness Analysis Full VehicleManeesh M KaimalÎncă nu există evaluări
- A-313 - 98Document7 paginiA-313 - 98José Ramón GutierrezÎncă nu există evaluări
- Me6503 Dme Unit 5 Study Notes 2015Document25 paginiMe6503 Dme Unit 5 Study Notes 2015Bala MuruganÎncă nu există evaluări
- RLE International - Tolerance Calculator PositionDocument1 paginăRLE International - Tolerance Calculator PositionJanaka MangalaÎncă nu există evaluări
- Me 581 Machine Tool Design Section 5 Design of Spindles and Spindle SupportsDocument54 paginiMe 581 Machine Tool Design Section 5 Design of Spindles and Spindle SupportsMlhhemreÎncă nu există evaluări
- Focus Handheld-Inspection User GuideDocument519 paginiFocus Handheld-Inspection User GuideJonnyÎncă nu există evaluări
- Linear Vibration Welding Design GuideDocument2 paginiLinear Vibration Welding Design GuideguptaashishÎncă nu există evaluări
- VB CreoDocument10 paginiVB CreoatmelloÎncă nu există evaluări
- Ball Joint Service and InspectionDocument6 paginiBall Joint Service and InspectionthehillnlÎncă nu există evaluări
- Snap Fit DesingDocument24 paginiSnap Fit DesingGerman LagÎncă nu există evaluări
- Iso 2901 2016Document9 paginiIso 2901 2016Brandon Vicuña GalánÎncă nu există evaluări
- Lab 1 Almost Complete Full ReportDocument16 paginiLab 1 Almost Complete Full ReportMuhammad Taufiq YusofÎncă nu există evaluări
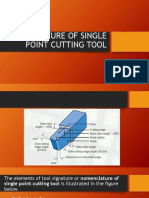
- Tool Signature ElementsDocument11 paginiTool Signature ElementsMaljon Daren DalanginÎncă nu există evaluări
- 2004-01-0403 - Design and Analysis of Fuel Tank Baffles To Reduce The Noise Generated From Fuel Sloshing PDFDocument14 pagini2004-01-0403 - Design and Analysis of Fuel Tank Baffles To Reduce The Noise Generated From Fuel Sloshing PDFCaio PaimÎncă nu există evaluări
- Steering Universal JointsDocument11 paginiSteering Universal JointsAman JainÎncă nu există evaluări
- CATIA V5 Training Course IntroductionDocument32 paginiCATIA V5 Training Course IntroductionFaisal Naveed SiddiquiÎncă nu există evaluări
- Cellasto A Microcellular Polyurethane ElastomerDocument12 paginiCellasto A Microcellular Polyurethane ElastomerHari SuthanÎncă nu există evaluări
- NX 10-Sheet Metal Design (Advanced) - Video TrainingTutorialsDocument4 paginiNX 10-Sheet Metal Design (Advanced) - Video TrainingTutorialsSmartlearning TechnologyÎncă nu există evaluări
- Simulation of Thermomechanical Behavior of Shape Memory Alloy Beams Using COMSOLDocument6 paginiSimulation of Thermomechanical Behavior of Shape Memory Alloy Beams Using COMSOLDEEPESH MEENAÎncă nu există evaluări
- Design & Analysis of Steering System Drag Link Against Buckling Loads For Tipper ApplicationDocument7 paginiDesign & Analysis of Steering System Drag Link Against Buckling Loads For Tipper ApplicationIJIERT-International Journal of Innovations in Engineering Research and TechnologyÎncă nu există evaluări
- GT&DDocument17 paginiGT&DMicha VardyÎncă nu există evaluări
- Engineering Drawing Exam QuestionsDocument8 paginiEngineering Drawing Exam QuestionsSurendra Babu KogantiÎncă nu există evaluări
- Upper One Sided Cusum Lower One Sided Cusum X Xi - 10.5 Ci+ N+ 9.5 - Xi Ci-N - Sample NumberDocument11 paginiUpper One Sided Cusum Lower One Sided Cusum X Xi - 10.5 Ci+ N+ 9.5 - Xi Ci-N - Sample NumberGanesh SubramanianÎncă nu există evaluări
- Guide For MSDocument80 paginiGuide For MSGanesh SubramanianÎncă nu există evaluări
- Groups Count Sum Average VarianceDocument5 paginiGroups Count Sum Average VarianceGanesh SubramanianÎncă nu există evaluări
- Festo Basic PneumaticDocument274 paginiFesto Basic Pneumaticshellafaye100% (15)
- Objet94EN All SolDocument276 paginiObjet94EN All Soldipankarb20036973Încă nu există evaluări
- C B Series: 3-5 and 4-6 Ton Steel Wheel CompactorsDocument4 paginiC B Series: 3-5 and 4-6 Ton Steel Wheel CompactorsRyoCaterpillarÎncă nu există evaluări
- GM 10007057 Switch Part Sales Statistics and InformationDocument9 paginiGM 10007057 Switch Part Sales Statistics and InformationJack MitchellÎncă nu există evaluări
- Dellow Automotive Pty LTD 37 Daisy Street Revesby NSW 2212 Australia PH: (02) 9774 4419 PH: (02) 9774 3873 Fax: (02) 9774 4783Document35 paginiDellow Automotive Pty LTD 37 Daisy Street Revesby NSW 2212 Australia PH: (02) 9774 4419 PH: (02) 9774 3873 Fax: (02) 9774 4783Andrew KingdomÎncă nu există evaluări
- Diagprog4 Support ListDocument40 paginiDiagprog4 Support ListBAbak RFÎncă nu există evaluări
- Drag Coefficient For CarsDocument16 paginiDrag Coefficient For CarsSandhya RamaswamyÎncă nu există evaluări
- MB1017A - Operating Instruction-Ilovepdf-Compressed PDFDocument146 paginiMB1017A - Operating Instruction-Ilovepdf-Compressed PDFJuan Jap100% (1)
- Wheel Cylinder CatalogueDocument7 paginiWheel Cylinder CatalogueGathogo GachanjaÎncă nu există evaluări
- Forklift Narrow Aisle Pre Use Inspection FormDocument1 paginăForklift Narrow Aisle Pre Use Inspection FormXYZÎncă nu există evaluări
- Pioneer Engineering Vendor Purchase RecordsDocument18 paginiPioneer Engineering Vendor Purchase RecordsSameer HusainÎncă nu există evaluări
- Design Brief - Small Coffee Shop Concept: WWW - Coffix.co - NZDocument8 paginiDesign Brief - Small Coffee Shop Concept: WWW - Coffix.co - NZAngela Centofanti RodriguezÎncă nu există evaluări
- Summer Training ReportDocument24 paginiSummer Training ReportAshish ShandilÎncă nu există evaluări
- Bugatti Type 57Document9 paginiBugatti Type 57jorge Angel LopeÎncă nu există evaluări
- PDF Toyota Starlet Ep82 Service Manual PDFDocument2 paginiPDF Toyota Starlet Ep82 Service Manual PDFArmando Amar50% (8)
- L5226Document1 paginăL5226paimeyÎncă nu există evaluări
- Doettling Focus Line PDF ENDocument20 paginiDoettling Focus Line PDF ENHerbertÎncă nu există evaluări
- Wiring & Clamp For Toyota Land Cruiser Prado KZJ78W - Genuine Parts 2Document1 paginăWiring & Clamp For Toyota Land Cruiser Prado KZJ78W - Genuine Parts 2sarmad ahmadÎncă nu există evaluări
- Replacing Double Sided Swing-Arm With Single Sided Swing-Arm For Bajaj Rs 200 MotorbikeDocument11 paginiReplacing Double Sided Swing-Arm With Single Sided Swing-Arm For Bajaj Rs 200 MotorbikeSiddharth KanoriaÎncă nu există evaluări
- RE-PDI PPT SLIDE 06-Nov To 10-Nov-23Document3 paginiRE-PDI PPT SLIDE 06-Nov To 10-Nov-23abbas razaÎncă nu există evaluări
- TVT25 Fixed Gooseneck Lowbed TrailerDocument2 paginiTVT25 Fixed Gooseneck Lowbed TrailerAhmad SabraÎncă nu există evaluări
- Msa British Autocross Championship 2009Document5 paginiMsa British Autocross Championship 2009fmatukÎncă nu există evaluări
- Daf LF Hybrid GBDocument4 paginiDaf LF Hybrid GBSamuel Page100% (1)
- Electric Cargo Cycle Range and FeaturesDocument14 paginiElectric Cargo Cycle Range and FeaturesJasÎncă nu există evaluări
- Kawasaki 90zv BrochureDocument12 paginiKawasaki 90zv Brochuretraingheo300100% (1)
- Astra Opc GBDocument3 paginiAstra Opc GBmnbvqwertÎncă nu există evaluări
- Lista Ecuflasher EcufixDocument14 paginiLista Ecuflasher EcufixJoakin BcÎncă nu există evaluări
- Volkswagen's Brand Equity Growth in the Indian MarketDocument9 paginiVolkswagen's Brand Equity Growth in the Indian MarketManav Lakhina100% (1)
- Cruce de Referencia Kit de PernosDocument8 paginiCruce de Referencia Kit de PernosVentas San LuisÎncă nu există evaluări
- VW World Manufacturer Identifier VWDocument5 paginiVW World Manufacturer Identifier VWGustavo Espinosa Souto100% (1)
- Volkswagen Beetle Common Problems and Solutions GuideDocument4 paginiVolkswagen Beetle Common Problems and Solutions Guideleo valentineÎncă nu există evaluări