Documente Academic
Documente Profesional
Documente Cultură
TO PT Listat
Încărcat de
Todirca AlexTitlu original
Drepturi de autor
Formate disponibile
Partajați acest document
Partajați sau inserați document
Vi se pare util acest document?
Este necorespunzător acest conținut?
Raportați acest documentDrepturi de autor:
Formate disponibile
TO PT Listat
Încărcat de
Todirca AlexDrepturi de autor:
Formate disponibile
ESENTA METODELOR DE CAUTARE
E vorba de met iterative la care se pleaca de la o
anumita initializare (x
0
) si se det succ pct
(x
1
,x
2
,...,x
k
), reprezentand aproximari din ce in ce
mai bune pt pct de min x*. Cautarea continua pana
la indepl unui criteriu de stop. Initializarea x
0
poate fi
aleasa la intamplare in interv(domeniul) de def unde
banuim ca exista min.
Iteratiile au la baza form: x
k+1
=x
k
+k!
k
" k-lun#
pasului daca $!
k
$=%" !
k
&directia de cautare
si ! se ale# a.i. la fiecare iteratie sa se obtina val
descresc pt fct obiectiv f.
Exista un nr mare de metode care difera prin modul
de ale#ere a lui ! si .
Clasif:(in fct de ale#erea directiei)
&'et de ord I (directe): se fol in calcule numai val fct
obiectiv
&'et de ord II: util si deriv de ord %
&'et de ord III: util in plus si deriv de ord (
)t calculul deriv se distin# ( posibilitati:
%.*e det expr analitice ale fct si acestea sunt
introduse in pro#r si folosite
(.*e fol evaluarea numerica a deriv fct. *e poate fol
si o varianta mixta: expr analitice pt deriv ord(. Eval
num poate da erori, precizia fiind mai ales afectata
de ale#erea incrementului de deriv.
)asul de deriv poate fi:
&cst
&var(din ce in ce mai mic)
&pas optim(lun# pasului ce duce la minim pe directia
de depl aleasa: min local)
*tabil pas optim se mai num si caut liniara exacta.
+et pas optim pp efectuarea la fiecare it a unui nr
mare de calcule suplim. ,a iteratia resp, cele
f(x
k+1
)=f(x
k
+ !
k
) unde s# nec este . )t a #asi
optim tb sa #asim min f(x
k
+ !
k
)=fct de o var.
-ceasta subprobl=prob de extremizare unidim care
tb sa fie cat mai eficienta. In acest scop se fol proc
de eliminare unidim sau interpolare unidim.
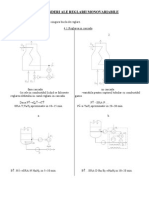
*emnif #eom:
&pp ca plecam din pct x
1
pe
dir !
&mer#em pana in pct - unde
f=C%
&daca marim pasul putem
a.un#e intr&un pct x
2
unde f
este t# la o curba C(.
-ceasta val e cea mai mica
posibila pe aceasta dir.
+aca micsoram pasul a.un#em in - iar daca marim
a.un#em in /, tot pe C%.
0el pt calc pas optim:
f(x
k
+!
k
)=f(x
k
)+ 1 f(x
k
),!
k
2+
+
2
3(1!
k
,4(x
k
)5!
k
2+...
4(x
k
)&matr 4essiana in pct x
k
sau
-ceasta ultima formula nu e fol in pro# deoarece
implica mat 4ess care implica deriv de ord (
FORM PROB DE OPTIMIZARE DINAMICA
-ceste prob se aplica la un sist cu modul matem
cunoscut" consid sist cu param concentrati
&C.I.: t6&fix3&liber" x(t0)&fixat(in x
0
) 3 &semiliber (in
x
0
78
0
c8)3&liber(x
0
78)
&Cond finale: tf & fixat3&liber" x(t
f
)&fixat3 semiliber3
liber
&0estrictii pt var de comanda
&0estr pt var de stare
&Crit de performanta(indice):
'(t6, tf, x6, xf)+ ,(x(t),u(t),t)dt
9ormularea #enerala a pb de opt dinamica
:arietatea mare de probl rezulta din comb posibile
ale tipurilor de elem de baza preciz. +aca starea init
x
0
este precizata si ale#em o comanda u(t) sist
dinamic * det o an traiectorie x(t)=2indicele de
calitate I depinde de x
0
si u(t).
I=;(x
0
,u(t)) si daca x
0
este precizat=2I=;(u(t))
Crit I apreciaza calitatea eval sist. In astfel de pb se
ale#e un criteriu care va fi min sau maximizat.
'aximizarea se poate considera min sc!imband
semnul.
*e pune problema de a minimiza I tinand cont de
cond de capat, de restr si de sistem. < astfel de pb
poate avea sau nu sol, poate fi sau nu unica=2dpdv
teoretic intereseaza aspecte le#ate de existenta si
unicitatea sol.
< pb de optimiz din corect formulata are sol si e de
multe ori unica. ,a fel ca la extremizarea fct met
conduc la det unor extreme locale de unde putem
selecta min #lobal.
,a sist ant avem o parte fixa 9 si un re#ulator care
tb det le#ea de cond optimala.
9iind dat un * si precizate C.I. si finale se cere sa
se det comanda optimala u*(t) in circ desc!is sau
inc!is a.i. sist sa fie transferat din C.I. in cele finale
cu respectarea restr care se impun asupra var de
stare si comanda a.i. sa fie minimizat crit de
comanda adoptat.
*e asi#ura si minimizarea criteriului=2din toate sol
posib se ale#e cea care asi# minimul criteriului.
FORMA GENERALA A PROBL DE OPT STATION
*e cere min dupa x pt fct f(x)" x7X
I==0
>(t)dt " I apreciaza calit re#imului stationar iar
calit re# tranz este ind de val finita a lui I. Cel mai
folosit rasp este cel periodic amortizat.
Ind consid va da un rasp eronat si deci nu va fi
folos, in sc!imb se fol alti indici de calitate, ca:
I%==0
>
2
(t)dt " I(==0
?> (t)?dt
)t a creste ponderea partii finale a rasp tranz se
poat folosi erori medii patratice:
I@==0
t>
2
(t)dt " IA==0
t
2
>
2
(t)dt
*unt sit in care se recomanda luarea in consid in
ind de calit si a deriv a erorii. )t >(t):
-stfel se evita var bruste ale lui >(t). *e a.un#e de
multe ori la val min pt acesti ind datorita cresterii
exa#erate a comenzii. )t prevenire se fol un ind
combinat unde u este
comanda apl partii fixate.
'inimizarea pe baza I%,I( duce la un rasp ind cu
osc relativ pronuntate. <sc mai mici se obt in cazul
crit I@ si i4.
)t un sist multivar avem IB==0
>
T
(t)5C5>(t)5dt
>
T
&vect al er cu comp erorii pt fiecare canal din sist
multivariabil" C=matr simetrica, poz def, de multe
ori dia#" forme nedia# pot apare in urma unor sc!
de var.
d))robl consumului min de ener#ie si a erorii medii
minime: se pune in cazul consumului de ener#ie. )t
un caz simplu de consumator puterea abs de
acesta este prop cu patratul curentului. +aca pp nr
de com si il not u
2
(t) puterea inst prop cu u
2
(t)=2
ener#ia de comanda prop cu tf
ID== u
2
(t)dt
t6
+aca intervin mai m mar de comanda se poate lua
in consid I%6==u
T
(t)5p(t)5u(t)dt" u(t)&vect marim de
comanda" p(t)&matrici poz def.
)t a nu se a.un#e la comenzi exa#erat de mari se
recomanda si penalizarea erorilor mari ale consum
de ener# in cadrul crit=2se poate adopta un crit de
forma:
&primul termen al inte#randului penalizeaza erorile
mari la mom final tf, deoarece intr&un astfel de crit
vect x are semnif unor abateri sau erori
&%&ul termen penalizeaza erorile tranzit mari iar
ultimul term penalizeaza val mari ale comenzilor
&matr C si ) pot fi var in timp at cand se urm realiz
unor ponderari in timp" ele sunt simetrice si *EC&
semidef iar )&strict poz def
&una din matr * sau C poate fi nula dar nu ambele
simultan
&se poate lua in consid un interval de timp F
e))robl controlului terminal=un control al cond de
capat. )oate fi de ctrl: init, final sau combinate.
f))robl de minimizare a c!eltuielilor: 'inimizarea
c!elt pp de multe ori minimiz unui indice #lobal care
urmeaza diverse aspecte asupra costului de
exploatare si intretinere. *e pot lua in considerare
productivitatea, uzura instalatiei, calitatea
produselor
COND NECESARA DE EXTREM
%)C.G. cand nu intervin restr
)p ca stim pct de min local x*: f(x*)Hf(x), pt orice
x*>:x*
f(x*+I!)&f(x*)J6, orice x>:x* =2 1 f(x*),!2 J6
pt orice ! din vecinat respectiva.
+eoarece ine#alit tb sa fie valabila oricare ar fi !, s#
posib este ca f(x*)=6 (%) si repr cond nec pt
min local in x*. )ct ce indepl cond=KstationareK sau
LcriticeK. )t a prec nat pct de extrem tb sa facem
apel si la niste cond suplimentare. -ceste cond
suplimentare in cazul pb de min vor oferi cond suf
de min. )t min local C.*. se refera la deriv de ord(:
tb sa fie indepl cond (%) si sa avem !(x*)26 (()
1=2matr !essiana in x* sa fie poz def.
()CG cu restr ine#alitate pt pb de optim totala
*e cere minimizarea lui f(x) cand #i(x)H6,i=%,m
0est definesc un domeniu * unde tb caut sol.
x* poate sa fie in interiorul lui * sau pe frontiera.
+aca este in inter restr sunt verif intr&o vecinat a lui
x* si x* satisface toate cond de la probl fara
restrictii.
Cazul specific si frecvent intalnit in astfel de
probleme este acela cand x* se afla pe o frontiera a
lui *.
In aceasta sit consid un pct de pe frontiera lui *=2 o
parte din restr sunt verif ca e#alitate. -c restr le
numim active. Ge intereseaza restr active in x* si
not cu I multimea ind restr active in x*
I=Mi?#i(x*)H6N " minMf(x)?#i(x)=6"i>IN
< astfel de pb apare ca pb cu restr de tip e#alitate:
Conf O. multipl. ,a#ran#e:
(@)
(A)
9ata de cazul restr e#alit mai apare pb le#ata de
semnul multipl P" pt simplificare consid ca avem
restr liniare sau liniarizate.
restr liniare: (Q)#i(x)=&1 2+ i
(B)
)p. x>*" x&x*(x patrunde in *)
(R)
(RS)
f(x)=f(x*)+1 f(x*), x&x*2
x* pct min =2 f(x*)1f(x)
ESENTA METODELOR DE CAUTARE
E vorba de met iterative la care se pleaca de la o
anumita initializare (x
0
) si se det succ pct
(x
1
,x
2
,...,x
k
), reprezentand aproximari din ce in ce
mai bune pt pct de min x*. Cautarea continua pana
la indepl unui criteriu de stop. Initializarea x
0
poate fi
aleasa la intamplare in interv(domeniul) de def unde
banuim ca exista min.
Iteratiile au la baza form: x
k+1
=x
k
+k!
k
" k-lun#
pasului daca $!
k
$=%" !
k
&directia de cautare
si ! se ale# a.i. la fiecare iteratie sa se obtina val
descresc pt fct obiectiv f.
Exista un nr mare de metode care difera prin modul
de ale#ere a lui ! si .
Clasif:(in fct de ale#erea directiei)
&'et de ord I (directe): se fol in calcule numai val fct
obiectiv
&'et de ord II: util si deriv de ord %
&'et de ord III: util in plus si deriv de ord (
)t calculul deriv se distin# ( posibilitati:
%.*e det expr analitice ale fct si acestea sunt
introduse in pro#r si folosite
(.*e fol evaluarea numerica a deriv fct. *e poate fol
si o varianta mixta: expr analitice pt deriv ord(. Eval
num poate da erori, precizia fiind mai ales afectata
de ale#erea incrementului de deriv.
)asul de deriv poate fi:
&cst
&var(din ce in ce mai mic)
&pas optim(lun# pasului ce duce la minim pe directia
de depl aleasa: min local)
*tabil pas optim se mai num si caut liniara exacta.
+et pas optim pp efectuarea la fiecare it a unui nr
mare de calcule suplim. ,a iteratia resp, cele
f(x
k+1
)=f(x
k
+ !
k
) unde s# nec este . )t a #asi
optim tb sa #asim min f(x
k
+ !
k
)=fct de o var.
-ceasta subprobl=prob de extremizare unidim care
tb sa fie cat mai eficienta. In acest scop se fol proc
de eliminare unidim sau interpolare unidim.
*emnif #eom:
&pp ca plecam din pct x
1
pe
dir !
&mer#em pana in pct - unde
f=C%
&daca marim pasul putem
a.un#e intr&un pct x
2
unde f
este t# la o curba C(.
-ceasta val e cea mai mica
posibila pe aceasta dir.
+aca micsoram pasul a.un#em in - iar daca marim
a.un#em in /, tot pe C%.
0el pt calc pas optim:
f(x
k
+!
k
)=f(x
k
)+ 1 f(x
k
),!
k
2+
+
2
3(1!
k
,4(x
k
)5!
k
2+...
4(x
k
)&matr 4essiana in pct x
k
sau
-ceasta ultima formula nu e fol in pro# deoarece
implica mat 4ess care implica deriv de ord (
FORM PROB DE OPTIMIZARE DINAMICA
-ceste prob se aplica la un sist cu modul matem
cunoscut" consid sist cu param concentrati
&C.I.: t6&fix3&liber" x(t0)&fixat(in x
0
) 3 &semiliber (in
x
0
78
0
c8)3&liber(x
0
78)
&Cond finale: tf & fixat3&liber" x(t
f
)&fixat3 semiliber3
liber
&0estrictii pt var de comanda
&0estr pt var de stare
&Crit de performanta(indice):
'(t6, tf, x6, xf)+ ,(x(t),u(t),t)dt
9ormularea #enerala a pb de opt dinamica
:arietatea mare de probl rezulta din comb posibile
ale tipurilor de elem de baza preciz. +aca starea init
x
0
este precizata si ale#em o comanda u(t) sist
dinamic * det o an traiectorie x(t)=2indicele de
calitate I depinde de x
0
si u(t).
I=;(x
0
,u(t)) si daca x
0
este precizat=2I=;(u(t))
Crit I apreciaza calitatea eval sist. In astfel de pb se
ale#e un criteriu care va fi min sau maximizat.
'aximizarea se poate considera min sc!imband
semnul.
*e pune problema de a minimiza I tinand cont de
cond de capat, de restr si de sistem. < astfel de pb
poate avea sau nu sol, poate fi sau nu unica=2dpdv
teoretic intereseaza aspecte le#ate de existenta si
unicitatea sol.
< pb de optimiz din corect formulata are sol si e de
multe ori unica. ,a fel ca la extremizarea fct met
conduc la det unor extreme locale de unde putem
selecta min #lobal.
,a sist ant avem o parte fixa 9 si un re#ulator care
tb det le#ea de cond optimala.
9iind dat un * si precizate C.I. si finale se cere sa
se det comanda optimala u*(t) in circ desc!is sau
inc!is a.i. sist sa fie transferat din C.I. in cele finale
cu respectarea restr care se impun asupra var de
stare si comanda a.i. sa fie minimizat crit de
comanda adoptat.
*e asi#ura si minimizarea criteriului=2din toate sol
posib se ale#e cea care asi# minimul criteriului.
FORMA GENERALA A PROBL DE OPT STATION
*e cere min dupa x pt fct f(x)" x7X
I==0
>(t)dt " I apreciaza calit re#imului stationar iar
calit re# tranz este ind de val finita a lui I. Cel mai
folosit rasp este cel periodic amortizat.
Ind consid va da un rasp eronat si deci nu va fi
folos, in sc!imb se fol alti indici de calitate, ca:
I%==0
>
2
(t)dt " I(==0
?> (t)?dt
)t a creste ponderea partii finale a rasp tranz se
poat folosi erori medii patratice:
I@==0
t>
2
(t)dt " IA==0
t
2
>
2
(t)dt
*unt sit in care se recomanda luarea in consid in
ind de calit si a deriv a erorii. )t >(t):
-stfel se evita var bruste ale lui >(t). *e a.un#e de
multe ori la val min pt acesti ind datorita cresterii
exa#erate a comenzii. )t prevenire se fol un ind
combinat unde u este
comanda apl partii fixate.
'inimizarea pe baza I%,I( duce la un rasp ind cu
osc relativ pronuntate. <sc mai mici se obt in cazul
crit I@ si i4.
)t un sist multivar avem IB==0
>
T
(t)5C5>(t)5dt
>
T
&vect al er cu comp erorii pt fiecare canal din sist
multivariabil" C=matr simetrica, poz def, de multe
ori dia#" forme nedia# pot apare in urma unor sc!
de var.
d))robl consumului min de ener#ie si a erorii medii
minime: se pune in cazul consumului de ener#ie. )t
un caz simplu de consumator puterea abs de
acesta este prop cu patratul curentului. +aca pp nr
de com si il not u
2
(t) puterea inst prop cu u
2
(t)=2
ener#ia de comanda prop cu tf
ID== u
2
(t)dt
t6
+aca intervin mai m mar de comanda se poate lua
in consid I%6==u
T
(t)5p(t)5u(t)dt" u(t)&vect marim de
comanda" p(t)&matrici poz def.
)t a nu se a.un#e la comenzi exa#erat de mari se
recomanda si penalizarea erorilor mari ale consum
de ener# in cadrul crit=2se poate adopta un crit de
forma:
&primul termen al inte#randului penalizeaza erorile
mari la mom final tf, deoarece intr&un astfel de crit
vect x are semnif unor abateri sau erori
&%&ul termen penalizeaza erorile tranzit mari iar
ultimul term penalizeaza val mari ale comenzilor
&matr C si ) pot fi var in timp at cand se urm realiz
unor ponderari in timp" ele sunt simetrice si *EC&
semidef iar )&strict poz def
&una din matr * sau C poate fi nula dar nu ambele
simultan
&se poate lua in consid un interval de timp F
e))robl controlului terminal=un control al cond de
capat. )oate fi de ctrl: init, final sau combinate.
f))robl de minimizare a c!eltuielilor: 'inimizarea
c!elt pp de multe ori minimiz unui indice #lobal care
urmeaza diverse aspecte asupra costului de
exploatare si intretinere. *e pot lua in considerare
productivitatea, uzura instalatiei, calitatea
produselor
COND NECESARA DE EXTREM
%)C.G. cand nu intervin restr
)p ca stim pct de min local x*: f(x*)Hf(x), pt orice
x*>:x*
f(x*+I!)&f(x*)J6, orice x>:x* =2 1 f(x*),!2 J6
pt orice ! din vecinat respectiva.
+eoarece ine#alit tb sa fie valabila oricare ar fi !, s#
posib este ca f(x*)=6 (%) si repr cond nec pt
min local in x*. )ct ce indepl cond=KstationareK sau
LcriticeK. )t a prec nat pct de extrem tb sa facem
apel si la niste cond suplimentare. -ceste cond
suplimentare in cazul pb de min vor oferi cond suf
de min. )t min local C.*. se refera la deriv de ord(:
tb sa fie indepl cond (%) si sa avem !(x*)26 (()
1=2matr !essiana in x* sa fie poz def.
()CG cu restr ine#alitate pt pb de optim totala
*e cere minimizarea lui f(x) cand #i(x)H6,i=%,m
0est definesc un domeniu * unde tb caut sol.
x* poate sa fie in interiorul lui * sau pe frontiera.
+aca este in inter restr sunt verif intr&o vecinat a lui
x* si x* satisface toate cond de la probl fara
restrictii.
Cazul specific si frecvent intalnit in astfel de
probleme este acela cand x* se afla pe o frontiera a
lui *.
In aceasta sit consid un pct de pe frontiera lui *=2 o
parte din restr sunt verif ca e#alitate. -c restr le
numim active. Ge intereseaza restr active in x* si
not cu I multimea ind restr active in x*
I=Mi?#i(x*)H6N " minMf(x)?#i(x)=6"i>IN
< astfel de pb apare ca pb cu restr de tip e#alitate:
Conf O. multipl. ,a#ran#e:
(@)
(A)
9ata de cazul restr e#alit mai apare pb le#ata de
semnul multipl P" pt simplificare consid ca avem
restr liniare sau liniarizate.
restr liniare: (Q)#i(x)=&1 2+ i
(B)
)p. x>*" x&x*(x patrunde in *)
(R)
(RS)
f(x)=f(x*)+1 f(x*), x&x*2
x* pct min =2 f(x*)1f(x)
min f(x) tb det a.i. !i(x)=6, i=%,l"lHn 3 #.(x)H6, .=%,m
!, #&cont si deriv
+aca l=n =2 sist are una sau mai m sol" lJn =2mai
multe ec decat necun deci nu avem nici o sol.
)b se clasifica pt ca exista o serie de al#oritmi cu
#eneralitate destul de mare dar exista si o serie de
al# specifici utilizabili pt anumite clase de prob, care
sunt mai eficienti pt clasele respective decat al#
#enerali.
-stfel avem pb liniare si nelin.
)rob lin: fct f, !i, #. sunt liniare
Ex: f(x)=a1x1+a2x2+a3x3
,a cele nelin cel putin una din fct este nelin:
f(x)=a1x1
2
+a2x2
2
Intalnim subclase de probleme: patratice, convexe,
#eometrice. ,a unele din aceste subclase restrictiile
sunt lin iar fct de min f este nelin.
In #en cel mai simplu se rez prob fara restrictii" cele
cu restr de tip Le#alK sunt mai simple decat cele cu
restr de tip ine#alitate.
Got un vect x>R
n
" x
T
=Tx% ... xnU
1x,V2=x
T
5V=V
T
5x=x%V%+ ... +xnVn
METODA GRAD OPTIMALCRITERIU DE STOP!
Wrad optimal: pasul de depl e optimal adica e pasul
care asi#ura minimul pe dir respectiva. *e calc cu
rel: x
k+1
=x
k
" kr
k
, r
k
= f(x
k
). Este o met
iterativa, la fiecare it avem o depl. -ceste depl
succesive sunt orto#onale. )asul optim se real
pana in mom in care dir este t# la o supr f(x)=const.
)asii sunt din ce in ce mai mici pt ca sunt prop cu
norm #radientului. Conv met este liniara.
,a aceasta met pct de min se obt dupa un nr infinit
de pasi. In cazul fct patratice min poate fi atins intr&
un s# pas daca: 8
T
C8=(8
T
C8)
2
38
T
C
3
8" poate avea
loc.
x este val proprie a matr C(Cx= x )
)ractic f(x)=const repr niste elipsoizi iar val propr
repr directiile axelor acestora. Oe!n de cautare se
apr mai rapid de min daca forma supr f(x) se
apropie de o sfera.
Criteriul de *O<): )ro#r pt met de cautare iterative
tb prevazute cu crit de stop care sa opreasca
desfas calculelor at cand se cons ca ne&am
apropiat de pct final #$ cu o anumita precizie
impusa. *unt unele metode care fol criterii de stop
specifice, dar de cele mai multe ori se folos crit #en.
Ex: %)?? f(x
k
)?? H7, 7&ales in fct de precizia
dorita"
()Cond bazate pe variatia ar# sau a fct:
??x
k+1
&x
k
?? H 7 " ??f(x
k+1
)& f(x
k
)?? H 7
@)Criterii relative
?? x
k+1
& x
k
?? 3 ?? x
k
?? H 7
? f(x
k+1
)& f(x
k
) 3 f(x
k
) ? H 7
+aca numitorii X26 atunci:
?? x
k+1
& x
k
?? 3 %+?? x
k
?? H 7 "? f(x
k+1
)& f(x
k
) 3 %+f(x
k
) ? H 7
PROBL UZUALE DE OPTIMIZARE DINAMICA
a))roblema timpului minim: se cere ca transferul
sistemului sa se realiz in timp minim.
I=tf&t6" '(t6,tf) =2 '(tf)=liber
)utem csd problema ca si una unde ,=%
-ici se impun restr de tip R sau U.
0estr:
&tip paralelipipedic: a%Hu%Hb%" in particular ?ui?H%
&tip sferic: ??u(t)?? Hr26
&tip cilindric(combinatie ale primelor doua)
tf
&= ??u(t)??
&
dtHm26
t6
b))robl consumului min de combustibil
I(t)=expr consumul de combust in unit de timp si
este fct de marimile de comanda
I(t)= IS(u1(t), ... , un(t))
I(t)= e.?u.(t)?" .26
In astfel de pb comenzile sunt limitate repr debite
de combust care pot lua val max permise de elem
de executie.
0estr asupra comenzii: ??u.(t)?? H%
Cond de capat:
&t6 este fixat
&tf este in #eneral liber
*e poate impune det val min a lui tf din cond
limitarii consum de combust.
*unt sit in care se are in vedere un indice combinat:
tf
I== (Y+ I(t))dt " I(t) provine din consumul de
t6 combust
Y=ponderea pe care o are in crit val lui t
c))robl erorii medii minime
Csd un sist automat monovariabil la care: r&marim
intr" V&marim iesire
)p reactia unitara: >(t)=r(t)&V(t)
Calit unui sist de acest #en este apreciata printr&o
serie de indici locali care pun in evid diverse
aspecte le#ate de
)utem folos si un indice #lobal prin care sa se repr
ev #lobala a sist atat in re# tranz cat si in re# stat.
Consid un rasp indicial de forma:
0asp ideal este tot treapta, dar nu il putem obt.
)utem insa aprecia ca rasp va fi cu atat mai bun cu
cat V se va apropia de aceasta forma.
PROBL DE OPTIMIZARE LINIAR PATRATICA CU
TIMP FINAL FINIT
(%)x(t)=-x(t)+/u(t)
F
(()I=%3(5= Tx
T
(t) 5C5x(t)+u
T
(t) 5)5u(t)Udt este conv
6
1=2var x si u &26 +eci x(tf)=6
x&26 =2 sist in circ inc!is=stabil daca (-,/) stab=
Cond ca pb sa aiba sol
(@) Itf=%3( = Tx
T
(t) 5C5x(t)+u
T
(t) 5)5u(t)Udt
*ol pt aceasta pb este sol ec matr diferentiale
0icatti. )t (@): 0(tf)=6 (A)
)t aceasta pb, daca (-,/) stabilizabila at sol coresp
0(6,tf,6) are lim cand tf&2F
(Z) lim 0(6,tf,6)=0 , 0&matr pozitiv def si satisface
ecuatia:
(Q) 0G0&0-&-
T
0&C=6, unde G=/5)
-1
5/
T
In (Z) ar#umentele marcate pt matr 0 specifica val
cond finale si momentele de capat(tf si 6). +eci pb
lin patr cu timp final finit referitor la sist (@) are sol
le#ata de ecuatia E'+0 cu propr (Z).
In le# cu pb se poate da teorema:
&+aca perec!ea (-,/) este stabilizata si matr din
crit satisf cond CJ6, )26 at:
*are loc propr (Z)
*matr 0 verif (Q)
*le#ea de comanda opt in crit inc!is este:
(B) u(t)=&)&%/O0x(t)
u(t)=Y5x(t)
*val ind de calit este: (R) I*=%3( x(6)
T
505x(6)
'atr Y e ne# este ct=2re#ulatorul este invariant,
ceea ce simplifica implementarea.
'atr 0 este unica sol poz def a (Q) si este sin#ura
solutie stabilizatoare dintre toate sol (Q). *ol este
cea coresp unui sist obisnuit cu reactie dupa stare.
+aca se pune si pb obt unui rasp rapid este de luat
in consid un crit care sa precizeze o val finita pt tf.
PROBLEMA LINIAR PATRATICA DISCRETA
-vem un ec!ivalent pt cazul discret:
(%)xk+1=-xk+/uk
(()
*J6" CJ6" )26
x[=x([O)
'atr din (%) si (() pot fi var sau ct (in fct de [)
0ezolvare:
se constr 4[=
(A)
(Z)
Cond de transversalitate:
(Q)
Impunem pt vect ad. o rel de forma: (B) P'=0'5x' si
at daca inloc in (A) si apoi in ec (%) a sist:
x'+1=-5x'&G5P'+1 " G=/5)
-1
5/
T
(R) x'+1=-5x'&G50'+15P'+1
(D) x'+1=
Inloc in (B) si (Z)=2 0'58'=C58'+-
T
50'+158'+1 sau
(%6)
care are loc pt orice x =2 putem scrie:
(%%)
(%%S)
-ceste ( ec se num ecuatia matr 0icatii cu
diferente. +in cond de capat avem:
(%()
)robl este de o sol (%%) cu cond de capat (%().
*olutionarea se face tot in timp invers.
+upa ce am stab matr 0[ inloc in (B) si apoi in (A) si
avem \'= &)
-1
5/
T
50'+158'+1 =2expr comenzii
optimala=2 8'+1 este inlocuit din (D)=2
\' funct de 8'.
min f(x) tb det a.i. !i(x)=6, i=%,l"lHn 3 #.(x)H6, .=%,m
!, #&cont si deriv
+aca l=n =2 sist are una sau mai m sol" lJn =2mai
multe ec decat necun deci nu avem nici o sol.
)b se clasifica pt ca exista o serie de al#oritmi cu
#eneralitate destul de mare dar exista si o serie de
al# specifici utilizabili pt anumite clase de prob, care
sunt mai eficienti pt clasele respective decat al#
#enerali.
-stfel avem pb liniare si nelin.
)rob lin: fct f, !i, #. sunt liniare
Ex: f(x)=a1x1+a2x2+a3x3
,a cele nelin cel putin una din fct este nelin:
f(x)=a1x1
2
+a2x2
2
Intalnim subclase de probleme: patratice, convexe,
#eometrice. ,a unele din aceste subclase restrictiile
sunt lin iar fct de min f este nelin.
In #en cel mai simplu se rez prob fara restrictii" cele
cu restr de tip Le#alK sunt mai simple decat cele cu
restr de tip ine#alitate.
Got un vect x>R
n
" x
T
=Tx% ... xnU
1x,V2=x
T
5V=V
T
5x=x%V%+ ... +xnVn
METODA GRAD OPTIMALCRITERIU DE STOP!
Wrad optimal: pasul de depl e optimal adica e pasul
care asi#ura minimul pe dir respectiva. *e calc cu
rel: x
k+1
=x
k
" kr
k
, r
k
= f(x
k
). Este o met
iterativa, la fiecare it avem o depl. -ceste depl
succesive sunt orto#onale. )asul optim se real
pana in mom in care dir este t# la o supr f(x)=const.
)asii sunt din ce in ce mai mici pt ca sunt prop cu
norm #radientului. Conv met este liniara.
,a aceasta met pct de min se obt dupa un nr infinit
de pasi. In cazul fct patratice min poate fi atins intr&
un s# pas daca: 8
T
C8=(8
T
C8)
2
38
T
C
3
8" poate avea
loc.
x este val proprie a matr C(Cx= x )
)ractic f(x)=const repr niste elipsoizi iar val propr
repr directiile axelor acestora. Oe!n de cautare se
apr mai rapid de min daca forma supr f(x) se
apropie de o sfera.
Criteriul de *O<): )ro#r pt met de cautare iterative
tb prevazute cu crit de stop care sa opreasca
desfas calculelor at cand se cons ca ne&am
apropiat de pct final #$ cu o anumita precizie
impusa. *unt unele metode care fol criterii de stop
specifice, dar de cele mai multe ori se folos crit #en.
Ex: %)?? f(x
k
)?? H7, 7&ales in fct de precizia
dorita"
()Cond bazate pe variatia ar# sau a fct:
??x
k+1
&x
k
?? H 7 " ??f(x
k+1
)& f(x
k
)?? H 7
@)Criterii relative
?? x
k+1
& x
k
?? 3 ?? x
k
?? H 7
? f(x
k+1
)& f(x
k
) 3 f(x
k
) ? H 7
+aca numitorii X26 atunci:
?? x
k+1
& x
k
?? 3 %+?? x
k
?? H 7 "? f(x
k+1
)& f(x
k
) 3 %+f(x
k
) ? H 7
PROBL UZUALE DE OPTIMIZARE DINAMICA
a))roblema timpului minim: se cere ca transferul
sistemului sa se realiz in timp minim.
I=tf&t6" '(t6,tf) =2 '(tf)=liber
)utem csd problema ca si una unde ,=%
-ici se impun restr de tip R sau U.
0estr:
&tip paralelipipedic: a%Hu%Hb%" in particular ?ui?H%
&tip sferic: ??u(t)?? Hr26
&tip cilindric(combinatie ale primelor doua)
tf
&= ??u(t)??
&
dtHm26
t6
b))robl consumului min de combustibil
I(t)=expr consumul de combust in unit de timp si
este fct de marimile de comanda
I(t)= IS(u1(t), ... , un(t))
I(t)= e.?u.(t)?" .26
In astfel de pb comenzile sunt limitate repr debite
de combust care pot lua val max permise de elem
de executie.
0estr asupra comenzii: ??u.(t)?? H%
Cond de capat:
&t6 este fixat
&tf este in #eneral liber
*e poate impune det val min a lui tf din cond
limitarii consum de combust.
*unt sit in care se are in vedere un indice combinat:
tf
I== (Y+ I(t))dt " I(t) provine din consumul de
t6 combust
Y=ponderea pe care o are in crit val lui t
c))robl erorii medii minime
Csd un sist automat monovariabil la care: r&marim
intr" V&marim iesire
)p reactia unitara: >(t)=r(t)&V(t)
Calit unui sist de acest #en este apreciata printr&o
serie de indici locali care pun in evid diverse
aspecte le#ate de
)utem folos si un indice #lobal prin care sa se repr
ev #lobala a sist atat in re# tranz cat si in re# stat.
Consid un rasp indicial de forma:
0asp ideal este tot treapta, dar nu il putem obt.
)utem insa aprecia ca rasp va fi cu atat mai bun cu
cat V se va apropia de aceasta forma.
PROBL DE OPTIMIZARE LINIAR PATRATICA CU
TIMP FINAL FINIT
(%)x(t)=-x(t)+/u(t)
F
(()I=%3(5= Tx
T
(t) 5C5x(t)+u
T
(t) 5)5u(t)Udt este conv
6
1=2var x si u &26 +eci x(tf)=6
x&26 =2 sist in circ inc!is=stabil daca (-,/) stab=
Cond ca pb sa aiba sol
(@) Itf=%3( = Tx
T
(t) 5C5x(t)+u
T
(t) 5)5u(t)Udt
*ol pt aceasta pb este sol ec matr diferentiale
0icatti. )t (@): 0(tf)=6 (A)
)t aceasta pb, daca (-,/) stabilizabila at sol coresp
0(6,tf,6) are lim cand tf&2F
(Z) lim 0(6,tf,6)=0 , 0&matr pozitiv def si satisface
ecuatia:
(Q) 0G0&0-&-
T
0&C=6, unde G=/5)
-1
5/
T
In (Z) ar#umentele marcate pt matr 0 specifica val
cond finale si momentele de capat(tf si 6). +eci pb
lin patr cu timp final finit referitor la sist (@) are sol
le#ata de ecuatia E'+0 cu propr (Z).
In le# cu pb se poate da teorema:
&+aca perec!ea (-,/) este stabilizata si matr din crit
satisf cond CJ6, )26 at:
*are loc propr (Z)
*matr 0 verif (Q)
*le#ea de comanda opt in crit inc!is este:
(B) u(t)=&)&%/O0x(t)
u(t)=Y5x(t)
*val ind de calit este: (R) I*=%3( x(6)
T
505x(6)
'atr Y e ne# este ct=2re#ulatorul este invariant,
ceea ce simplifica implementarea.
'atr 0 este unica sol poz def a (Q) si este sin#ura
solutie stabilizatoare dintre toate sol (Q). *ol este
cea coresp unui sist obisnuit cu reactie dupa stare.
+aca se pune si pb obt unui rasp rapid este de luat
in consid un crit care sa precizeze o val finita pt tf.
PROBLEMA LINIAR PATRATICA DISCRETA
-vem un ec!ivalent pt cazul discret:
(%)xk+1=-xk+/uk
(()
*J6" CJ6" )26
x[=x([O)
'atr din (%) si (() pot fi var sau ct (in fct de [)
0ezolvare:
se constr 4[=
(A)
(Z)
Cond de transversalitate:
(Q)
Impunem pt vect ad. o rel de forma: (B) P'=0'5x' si
at daca inloc in (A) si apoi in ec (%) a sist:
x'+1=-5x'&G5P'+1 " G=/5)
-1
5/
T
(R) x'+1=-5x'&G50'+15P'+1
(D) x'+1=
Inloc in (B) si (Z)=2 0'58'=C58'+-
T
50'+158'+1 sau
(%6)
care are loc pt orice x =2 putem scrie:
(%%)
(%%S)
-ceste ( ec se num ecuatia matr 0icatii cu
diferente. +in cond de capat avem:
(%()
)robl este de o sol (%%) cu cond de capat (%().
*olutionarea se face tot in timp invers.
+upa ce am stab matr 0[ inloc in (B) si apoi in (A) si
avem \'= &)
-1
5/
T
50'+158'+1 =2expr comenzii
optimala=2 8'+1 este inlocuit din (D)=2
\' funct de 8'.
S-ar putea să vă placă și
- Tabele Calcul Proiect Constructii Din ZidarieDocument62 paginiTabele Calcul Proiect Constructii Din ZidarieTodirca AlexÎncă nu există evaluări
- Calcul Actiunea VantuluiDocument6 paginiCalcul Actiunea VantuluiTodirca AlexÎncă nu există evaluări
- Proiect Constructii Metalice SpecialeDocument12 paginiProiect Constructii Metalice SpecialeTodirca AlexÎncă nu există evaluări
- Curs Ingineria Reglarii AutomateDocument27 paginiCurs Ingineria Reglarii AutomateTodirca AlexÎncă nu există evaluări
- Plansa Grinda Cu ZabreleDocument1 paginăPlansa Grinda Cu ZabreleVasile MagaÎncă nu există evaluări
- Curs Ingineria Reglarii AutomateDocument10 paginiCurs Ingineria Reglarii AutomateTodirca AlexÎncă nu există evaluări
- Subiect e Tehnici de OptimizareDocument3 paginiSubiect e Tehnici de OptimizareTodirca AlexÎncă nu există evaluări
- RezumatDocument70 paginiRezumatTodirca Alex100% (1)
- Sisteme Automate Cu EsantionareDocument10 paginiSisteme Automate Cu EsantionareTodirca AlexÎncă nu există evaluări