Documente Academic
Documente Profesional
Documente Cultură
04.2-RPTCM RI Modul2 - v13.1 (NXPowerLite)
Încărcat de
Jessica PerryTitlu original
Drepturi de autor
Formate disponibile
Partajați acest document
Partajați sau inserați document
Vi se pare util acest document?
Este necorespunzător acest conținut?
Raportați acest documentDrepturi de autor:
Formate disponibile
04.2-RPTCM RI Modul2 - v13.1 (NXPowerLite)
Încărcat de
Jessica PerryDrepturi de autor:
Formate disponibile
Tudor Punescu 2010 T.Paunescu RPTCM -2013.
1
1
2
Sistemul modular RRC are la baz doua tipuri de module cu acionare electric, tip rotaie de pivotare (roll)
i tip articulaie cot (pitch). Eventualele module intemediare (cu rol de distanieri) pot fi intercalte ntre
modulele cinematice.
3
Fiecare modul RRC este acionat de cte un motor electric CC fr perii, conine un reductor armonic cu
roi dinate, frn rapid, rulmeni n carcas de protecie, senzori de poziie i de torsiune, totul ncorporat
ntr-o carcas uoar de Al.
Conectarea/deconectarea unui modul se face rapid n aproximativ un minut. Se utilizeaz un sistem
mecanic de fixare cu coliere (tip Voss).
Modulele de o anumit mrime sunt identice n interior, difer doar modul de conectare, fapt avantajos
pentru productor i pentru depanator.
Cablurile fiecrui modul sunt plasate n alezajul arborelui principal al modulului, astfel c acestea sunt
protejate i au n consecin au o durat de via mare.
detaliere
salt
4
www.vossind.com
5
www.vossind.com
6
Configuraii de RIM tip RRC, cu cte 7 grade de mobilitate (roboi redundani cinematic cu dexteritate mrit)
7
a
b
c
a
.
R
I
M
t
i
p
K
-
1
2
0
7
i
c
u
7
g
r
a
d
e
d
e
m
o
b
i
l
i
t
a
t
e
b
.
R
I
M
t
i
p
K
-
2
0
1
7
i
c
u
1
7
g
r
a
d
e
d
e
m
o
b
i
l
i
t
a
t
e
c
.
A
p
l
i
c
a
i
e
p
e
n
t
r
u
N
A
S
A
G
o
d
d
a
r
d
S
p
a
c
e
F
l
i
g
h
t
C
e
n
t
e
r
,
p
r
o
g
r
a
m
u
l
H
u
b
b
l
e
T
e
l
e
s
c
o
p
e
d
8
Roboii RRC realizeaz o precizie de repetabilitate cu o abatere standard de sub 0,05
mm. De exemplu robotul 2107HR, cu anvergur 2 m i 7grade de mobilitate, optimizat pentru
lucrri de precizie asigur o repetabilitate de 0.013mm.
RI modular cu 7 grade de mobilitate este redundant cinematic (un RI care opereaz n
spaiul 3D i care are 6 grade de mobilitate este un RI neredundant, un RI cu M>6 este
redundant, cele 6 ecuaii ale poziiei i orientrii endefectorului au 7 necunoscute deplasrile
n cuplele lanului cinematic de ghidare).
Pentru managementul redundanei cinematice RRC a brevetat urmtorul algoritm: n
fiecare cupl s-a prevzut cte un arc spiral imaginar, algoritmul utilizeaz o procedur de
optimizare cu o funcie obiectiv minimizare energiei de deformare a arcurilor imaginare. Dup
caz funcia scop poate fi i: minimizarea vitezelor n cuplele LG, minimizarea deplasrilor n
cuple etc. Software-ul RRC are abilitatea s recunoasc i s trateze singularitile
cinematice.
Roboii RRC utilizeaz un servocontrol bazat pe reacia invers a momentelor de torsiune
din fiecare cupl a LG, permind un control al forelor pot fi utilizai i n aplicaii de polizare,
debavurare.
9
Conceptul sistemului modular POWERCUBE
1. Un sistem modular pentru RI cu mari posibiliti combinaionale poate fi conceput fie cu relativ
multe module i puine suprafee de conexiune, fie cu relativ puine module i multe
posibiliti de conectare ale fiecrui modul. PowerCube a adoptat cea de a doua variant,
suprafeele de conectare fiind feele unui cub cu trei dimensiuni: 70, 90 i 110 mm.
2. Interfaa mecanic este diferit de cea de putere i de semnal, este universal pentru toate
modulele cinematice. Pentru conectare se utilizeaz corpuri intermediare.
3. Pentru a nu limita posibilitile de combinare a modulelor prin interfaa electric i electronic
se face alimentarea i schimbul de semnale doar pentru cte un modul (conexiuni paralel
de la controler, deci interfaa pentru un modul este independent de numrul de module
care formeaz un RI).
4. Inteligen local distribuit fiecrui modul. Fiecare modul cinematic este dotat cu un
minicontroler, de la controlerul RI se primesc doar comenzi de nivel nalt.
10
MODULELE CINEMATICE ALE SISTEMULUI MODULAR POWERCUBE
MODULELE DE CUPLARE ALE SETULUI POWERCUBE
11
MODULUL DE ROTAIE (PR)
- cursa: 160
0
... +160
0
;
- precizie: 0.02
0
;
- senzori incrementali
pentru poziie i vitez;
- monitorizare curent i
temperatur la motor;
- reductor armonic 1:160;
- controler 16 bii integrat
n motor;
-motor CC 24 sau 48V
(vezi i fiierul dm.mpg)
12
13
MODULUL DE TRANSLAIE POWERCUBE
14
Varianta de modul de translaie cu transmisie elicoidal
15
16
MODUL BIMOBIL DE ROTAIE (PW NCHEIETURA)
Pentru cinematic vezi i fiierul hand.mpg
17
18
MODULUL PREHENSOR
BIDACTIL
(pentru cinematic vezi fiierul gripper.mpg)
19
Pozionarea precis a
componentelor PowerCube
se face prin intermediul
unor buce, fixarea prin
uruburi care trec prin buce
20
EXEMPLE DE R I MODULARI POWERCUBE
FORMAI DIN MODULE PR, PW, PLS
PowerCube SCARA
4 mob; 3 kg cap. ncrc; repet. 0,1 mm
PowerCube
5 mob; 5 kg cap. ncrc; repet. 0,1 mm
PowerCube
6 mob; 3 kg cap. ncrc; repet. 0,1 mm
21
PowerCube
6 mob; 4 kg cap. ncrc; repet. 0,1 mm
PowerCube
7 mob; 3 kg cap. ncrc; repet. 0,1 mm
PowerCube
5 mob; 3 kg cap. ncrc; repet. 0,1 mm
22
P
r
o
i
e
c
t
u
l
H
E
R
M
E
S
B
u
n
d
e
s
w
e
h
r
U
n
i
v
e
r
s
i
t
y
M
u
n
i
c
h
,
T
h
e
I
n
s
t
i
t
u
t
e
o
f
M
e
a
s
u
r
e
m
e
n
t
S
c
i
e
n
c
e
Braele, prehensorul, zona cervical a robotului inteligent Hermes sunt construite pe baza modulelor PowerCube
Vezi fiierul service.mpg, pentru alt aplicaie vezi fiierul useall.mpg.
23
MODULUL DE ROTAIE (PRL)
4 dimensiuni PRL
24
PowerCube LWA
6 mob; 6 kg cap. ncrc; repet. 0,1 mm
PowerCube LWA
7 mob; 3 kg cap. ncrc; repet. 0,1 mm
PowerCube LWA
7 mob; 10 kg cap. ncrc; repet. 0,1 mm
EXEMPLE DE R I MODULARI POWERCUBE
FORMAI DIN MODULE PRL
Vezi Shunk PowerCube Modules for Creating Robots.flv
25
EXEMPLE DE APLICATII ALE R I MODULARI POWERCUBE FORMAI DIN MODULE PRL
26
MODULUL DE ROTAIE (SPB)
Gabarit cu 50% mai mic dect alte modula similare
+170
0
- 170
0
27
Cu 3 module SPB nseriate se poate construi un RI cu 6 grade de mobilitate
28
GEMOTEC este un set modular cu acionare pneumatic cu urmtoarele tipuri de module:
- module de translaie, seriile:
- LM module cu ghidare pe role;
- KLM module cu ci de rulare cu bile recirculabile;
- PMP - module portal.
- module de rotaie, seriile:
- RM cu acionare direct, motor cu palet;
- RM cu acionare indirect prin cremalier - pinion;
- prehensoare, seriile:
- GM bidactile, cu curs paralel mic;
- GM bidactile, cu curs paralel mare;
- GMW bidactile cu curs unghiular;
- RW modulare cu strngere prin arc i desfacere mecanizat.
- accesorii: placi centrare, adaptoare (vezi fiierul RPTCM4 modul1.ppt ), amortizoare etc.
GEMOTEC este un set modular amplu, cu numeroase serii dimensionale.
Pentru a facilita sinteze LG firma furnizeaz i o aplicaie Excel (vezi fiierul toolbox.xls).
Ca i cazul majoritii firmelor care vnd produse n concepie modular pot fi achiziionate freeware
bibliotecile CAD ale modulelor.
(http://www.schunk.com )
29
MODULELE DE ROTAIE
(
h
t
t
p
:
/
/
w
w
w
.
s
c
h
u
n
k
.
c
o
m
)
30
(
h
t
t
p
:
/
/
w
w
w
.
s
c
h
u
n
k
.
c
o
m
)
31
RM 50, 110, 200, 300, 400
Pentru construcii vezi fiierul
RPTCM3 robotomec.ppt.
Caracteristici tehnice:
- motor cu palet oscilant;
- cursa: 0 ... 180
0
;
- Mt la 6 bar: 0.7 Nm ... 36 Nm;
- cap nc: . 800N ... 5000N:
- precizie: 0.02
0
;
- masa: 0.65 ... 15.3 Kg.
RM 12, 15, 21
Pentru construcii vezi fiierul
RPTCM3 robotomec.ppt.
Caracteristici tehnice:
- cursa: 0 ... 180
0
;
- Mt la 6 bar: 0.38 Nm ... 1.9 Nm;
- cap nc. 590N ... 950N:
- precizie: 0.05
0
; 32
Rotary
Actuators
RM 50
RM 110
RM 200
RM 300
RM 400
Rotation angle 10 - 180 0 - 180 0 - 180 0 - 180 0 - 180
Torque at 6 bar 0,70 Nm 1,95 Nm 4,00 Nm 20,0 Nm 36,0 Nm
External dimensions
L x B x H
52 x 52 x 67mm 65 x 65 x 85mm 80 x 80 x 115mm 125 x 125 x 175mm 155 x 155 x 220mm
End position
accuracy
0,022 0,018 0,022 0,023 0,022
Load capacity Up 800 N Up 1200N Up 1800N Up 3200N Up 5000N
Mass 0,65 kg 1,12 kg 2,10 kg 8,50 kg 15,30 kg
Damping (1)
Hyd. shock absorber
End(2)
position monitoring
Proximily switch
Intermediate stop
Dimensional
sketch
Dimensional
sketch
Dimensional
sketch
Dimensional
sketch
Dimensional
sketch
Maintenance-free
33
MODULELE DE TRANSLAIE GEMOTEC
Seria LM
Ghidare cu role
i ci de rulare cu profil V
Seria KLM
Ghidare cu bile
recirculabile
34
Seria de module LM
Linear
actuator
LM 25
LM 50
LM 100
LM 200
LM 300
Stroke length Up to 59mm Up to 100mm Up to 225mm Up to 350mm Up to 450mm
Piston force at 6 bar 67 N 120 N 294 N 482 N 753 N
Ext. dimensions BxH 35 x 32mm 45 x 45mm 65 x 60mm 80 x 75mm 90 x 85mm
End position accuracy 0,005mm 0,005mm 0,01mm 0,01mm 0,01mm
Load capacity (1) Up to 300 N Up to 1000N Up to 1500N Up to 4000N Up to 5200N
Mass
0,44 kg
(Stroke 25 mm)
0,88 kg
(Stroke 25mm)
2,60 kg
(Stroke 75mm)
5,00 kg
(Stroke 100mm)
6,20 kg
(Stroke 100mm)
Damping (2)
Hydr. shock absorber
End (2)
position monitoring
Intermediate stop ZZA 026 / 027 ZZA 051 / 052 ZZA 101 / 102 ZZA 201 / 202 ZZA 301 / 302
Dimensional
sketch
Dimensional
sketch
Dimensional
sketch
Dimensional
sketch
Dimensional
sketch
Maintenance
Lubricated for life.
Lubricated with rolling bearing grease is recommended after approx 3000 km.
35
Modul seria LM
36
Modul seria KLM
37
Seria de module PMP (portal)
38
PMP Portal Actuators
PMP16
PMP25
Maximum stroke length 5000mm 5000mm
Feed force at 6bar 100N 250N
External dimensions B x H 85 x 75mm 125 x 105mm
Repeat accuracy 0,02mm 0,02mm
Load capacity(1) up to 3000N up to 4200N
Mass at 1000mm stroke 9,5kg 16,4kg
End position damping(2)
Hydr. shock abs.
End position monitoring(2)
Proximity switch
Intermediate stop(3) ZA16 / AS16 ZA25 / AS25
Variable end stop(3) VE16 VE25
Dimensional sketch Dimensional sketch
39
Seria GM
(prehensor cu curs paralel mic)
Gripper actuators
GM 80
GM 81
GM 100
GM 101
GM 200
GM 201
Stroke per jaw 2,5mm 4,5mm 4,0mm 7,0mm 6,0mm 10,0mm
Gripping force - clasping 200N 120N 300N 160N 600N 340N
Gripping force - expanding 200N 120N 300N 160N 600N 340N
Repeat accuracy 0,02mm 0,02mm 0,02mm 0,02mm 0,02mm 0,02mm
Mass 0,32kg 0,32kg 0,62kg 0,62kg 1,75kg 1,75kg
End position monitoring(1)
Proximity switch
Dimensional
sketch
Dimensional
sketch
Dimensional
sketch
Dimensional
sketch
Dimensional
sketch
Dimensional
sketch
Option (2) Grip force safety locking device for clamping or expansion Jaw stroke adjustment in both directions
Maintenance Relubrication is recommended after approx. 4 million cycles
40
a b
c
a. Modul preh. curs mare.
b. Modul preh. curs unghiular
c. Modul de roto-prehensare
Detalii constructive n fiierul RPTCM5 preh.ppt
41
Scheme de montaj a prehensoarelor GEMOTEC
42
MANIPULATOR GEMOTEC
CU DOU GRADE DE MOBILITATE
43
Mecanisme de ghidare modulare GEMOTEC
44
Aplicaie RMI Gemotec la operaii de asamblare mecanic
Vezi SCHUNK Gemotec Modular Assembly Systems.flv
45
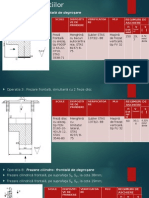
MODULE DE TRANSLAIE
Principiul constructiv
Plci de conectare: 1,12
Buc de ghidare
Cmaa motorului pneumatic:3
Tija pistonului: 5
Opritori mecanici reglabili:4
Piston, etanare piston :7
Amortizor: 10
Bare de ghidare:8
46
47
48
MODULE DE ROTAIE
49
50
51
52
53
AMORTIZORI DE OC
54
55
56
APLICAII ALE SETULUI SOMMER
57
58
Dimensions: 206x386 mm
Weight: 6.6 kg
Torque (at 45 rotation and with cylinders pulling):
1657 Nm
HYDRABOT
The Modular Electro-Hydraulic Robot Arm (2009)
M
o
d
u
l
a
r
E
l
e
c
t
r
o
-
H
y
d
r
a
u
l
i
c
R
o
b
o
t
A
r
m
59
60
3.1. RMMS (Reconfigurable Modular Manipulator System)
Carnegie Mellon University, USA
3.2. Modular Reconfigurable Robot
Nanyang Technological University, Singapore
(vezi directorul Nanyang TU)
3.3. Modular Robotic System
Toronto University, Canada
61
Actualmente s-au impus seturile modulare cu acionare pneumatic (P) i electric (E). Seturile
hidraulice (H) au fost practic eliminate datorit problemelor legate de etanare la nivelul cuplrii modulelor i
cerinelor de mediu curat pentru multe aplicaii, costurilor relativ ridicate.
Capacitatea de ncrcare a RI modulari
Datorit puterii specifice relativ reduse a acionrii P i E comparativ cu H, seturile modulare sunt
destinate unor RI cu capaciti de ncrcare de ordinul kilogramelor.
Controlabilitatea
P este mult mai puin controlabil dect E fiind un mediu compresibil i mult mai sensibil la perturbaii
(temperatur etc).
Complexitatea sarcinilor
Un modul cinematic monomobil P poate fi precis controlat n dou puncte (capetele de curs ale
motorului P) i imprecis ntr-un punct intermediar. Deci un RI cu lan cinematic simplu deschis, agregat din
module monomobile poate lucra cu 2
n
configuraii ale LG, unde cu n s-a notat gradul de mobilitate a LG.
62
De exemplu, pentru un LG cu n=6, caz rar ntlnit, rezult 2
6
= 64 de configuraii cu care
evident nu se pot realiza sarcini complexe, traiectorii complicate.
Deoarece un modul acionat electric poate fi teoretic controlat ntr-o infinitate de puncte din
intervalul de micare a cuplei, traiectoriile generate de acest tip de RI pot fi mult mai complexe.
Complexitatea LG modulare
RI modulari P sunt destinai unor operaii simple pick and place, servire un utilaj sau o MU,
avnd n general 3, 4 grade de mobilitate. Aplicaiile RI modulari electrici se bazeaz pe LG
complexe avnd 6 grade de mobilitate i mai mult pentru RI redundani.
Precizia
Modulele P i E au precizii de repetabilitate comparabile:
-
T
= 0.01 ... 0.05 mm
-
R
= 0.02 ... 0.05
0.
Costuri
Costul unui RI modular E este mai mare dect a unuia P, datorit complexitii constructive a
MC ct i a sistemului senzorial, de control, de programare.
63
S-ar putea să vă placă și
- Filmul OperatiilorDocument8 paginiFilmul OperatiilorJessica PerryÎncă nu există evaluări
- 05.2-RPTCM Preh - v13.1 (NXPowerLite)Document54 pagini05.2-RPTCM Preh - v13.1 (NXPowerLite)Jessica PerryÎncă nu există evaluări
- 05.1-RPTCM Preh - v13.1 (NXPowerLite)Document41 pagini05.1-RPTCM Preh - v13.1 (NXPowerLite)Jessica PerryÎncă nu există evaluări
- Proiectarea Sculelor AschietoareDocument22 paginiProiectarea Sculelor AschietoareJessica PerryÎncă nu există evaluări