Documente Academic
Documente Profesional
Documente Cultură
13 Cosmin Berceanu
Încărcat de
pablo_genezaTitlu original
Drepturi de autor
Formate disponibile
Partajați acest document
Partajați sau inserați document
Vi se pare util acest document?
Este necorespunzător acest conținut?
Raportați acest documentDrepturi de autor:
Formate disponibile
13 Cosmin Berceanu
Încărcat de
pablo_genezaDrepturi de autor:
Formate disponibile
Analele Universit ii Constantin Brncu i din Trgu Jiu, Seria Inginerie, Nr.
1/2010
O NOU MN ROBOTIC ANTROPOMORF ACIONAT PRIN TENDOANE - CONSTRUCIE, SIMULRI I FABRICAIE
A NEW TENDON DRIVEN ROBOTIC ANTHROPOMORPHIC HAND CONSTRUCTION, SIMULATIONS AND FABRICATION
Cosmin BERCEANU Facultatea de Mecanic din Craiova Daniela TARNI Facultatea de Mecanic din Craiova Alexandru STANIMIR Facultatea de Mecanic din Craiova Florin CISMARU Facultatea de Mecanic din Craiova Cosmin MIRITOIU Facultatea de Mecanic din Craiova
Rezumat: n aceast lucrare se prezint o nou mn robotic antropomorf care poate fi utilizat ca i protez pentru pacienii care au suferit o amputaie de mn sau membru superior. Se descrie n detaliu abordarea tiinific care a dus la rezolvarea unei probleme de o asemenea complexitate: de la creerea modelului tridimensional, la simulrile cinematice i pn la fabricarea primului prototip. Cuvinte cheie: mn robotica antropomorfa, protez, sisteme mecanice de prehensiune neantropomorfe
Cosmin BERCEANU Faculty of Mechanics, Craiova Daniela TARNI Faculty of Mechanics, Craiova Alexandru STANIMIR Faculty of Mechanics, Craiova Florin CISMARU Faculty of Mechanics, Craiova Cosmin MIRITOIU Faculty of Mechanics, Craiova
Abstract: In this paper we present a new developed artificial hand which can be used as prosthetic device for patients who have suffered a hand or upper limb amputation. We describe in detail the scientific approach which enabled us to solve such a complex problem: from the threedimensional computer created model to simulations and the fabrication process. Key words: robotic anthropomorphic hand, prosthetic, anthropomorphic mechanical grippers
1. Introducere n ultimii 30 ani un mare numr de sisteme mecanice de prehensiune au fost dezvoltate pentru mediul industrial sau ca i produse de studiu n laboratoarele de cercetare [1, 2, 3, 4, 5, 6 and 7]. n mediul industrial se poate observ o gam foarte larg de sisteme mecanice de prehensiune neantropomorfe cu aplicaii de la industria alimentar pn la industria auto i chiar militar. Modelul mecanic al acestor sisteme de prehensiune este deseori caracterizat
1. Introduction In the past 30 years a great number of artificial grippers have been developed for industrial applications or as laboratory research products [1, 2, 3, 4, 5, 6 and 7]. In the industrial environment we find a vast array of non anthropomorphic mechanical grippers used from the food processing industry to the automotive industry. The mechanical model of these grippers is often characterized by a small
Annals of the Constantin Brncu i University of Trgu Jiu, Engineering Series, Issue 1/2010
123
Analele Universit ii Constantin Brncu i din Trgu Jiu, Seria Inginerie, Nr. 1/2010
de un numr mic de grade de libertate care duce la o capacitate de prehensare redus datorit numrului mic de suprafee n contact cu obiectul i, deci, performane limitate [8]. Chiar dac pentru aplicaiile industriale performanele acestora sunt mulumitoare, n domenii care reclam o palet ct mai larg de micri ale prilor mecanice (bacuri, degete etc.) aceti gripperi industriali nu mai reprezint o soluie. De exemplu, n domeniul roboticii sau al protezrii cerinele optime pentru astfel de produse sunt: dezvoltarea de fore de prehensare ct mai apropiate de cele ale minii umane, sistem senzorial modern, estetic, mas redus, interfa de comand i control simpl i intuitiv i replicarea ct mai fidel a micrilor minii umane. Ultima condiie poate fi ndeplinit doar prin conceperea unui model mecanic cu suficiente grade de libertate, model mecanic construit prin similitudine cu modelul anatomic al minii umane. De aceea, modelul mecanic al unui asemenea produs trebuie s conin doar la nivelul falangelor 19 grade de libertate [9]. O problem stringent cu care se confrunt cercettorii din ntreaga lume este aceea a nlocuirii unei prti a corpului uman. Componenta artificial care substituie componenta anatomic va trebui s fie proiectat astfel nct s funcioneze o lung perioad de timp fr alte intervenii. n particular, o protez pentru mn sau membru superior trebuie s respecte urmtoarele deziderate: s aib performane funcionale bune (fore dezvoltate, gam de micri , sistem senzorial etc.), s fie adaptabil corpului pacientului, s aib o estetic apropiat de aceea a minii umane i s fie accesibil. Multe companii produc la ora actual asemenea produse pentru pacienii cu amputaii de mn sau membru superior, ns costul unei proteze de ultim generaie este suficient de ridicat astfel nct doar o mic parte a pacienilor i permit achiziionarea acestui produs. Una dintre companiile care produc proteze este Touchbionics Inc. Cel mai nou produs de acest tip al companiei (i-Limb) este considerat a fi una dintre cele mai avansate proteze pentru mn sau
number of D.O.F.s which leads to a reduced gripping potential and poor performance [8]. For the industry their capabilities are satisfactory, but in applications where the array movement of the mechanical parts is complex the industrial grippers are not the solution. For example, in the robotic or medical prosthetic field the prerequisites for such products are: force capabilities close to those developed by the human hand, modern sensing devices, aesthetics, mass, friendly control interface and exact movement replication as the human hand. The last condition can be solved only by designing a mechanical model with enough degrees of freedom. Therefore, the mechanical model for such a device should be developed by comparison with the human hand which possesses only at the phalanxes level 19 DOF [9]. All around the word the scientist are trying to solve one of the most complex problems: the replacement of a human body part. The artificial device who will replace the defective body part must be able to function a long period of time without servicing. In particular, a prosthetic device for the human hand or upper limb is mandatory to respect the following prerequisites: human friendly in terms of general performance (force capabilities, proprioceptive abilities, movement replication etc.), aesthetics, and, of course, it must be cost effective. Many companies are producing such devices for patients in need, but the cost of a modern prosthetic device is high enough so only some wealthy patients benefit from these latest achievements. One of these companies is Touchbionics Inc. which produces the i-Limb prosthetic device. i-Limb is considered one of the most technological, easy to live with prosthetic device ever created not only by the patients who tried or used the i-Limb, but also by the medical staff.
Annals of the Constantin Brncu i University of Trgu Jiu, Engineering Series, Issue 1/2010
124
Analele Universit ii Constantin Brncu i din Trgu Jiu, Seria Inginerie, Nr. 1/2010
membrul superior.
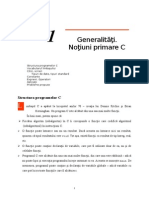
Figura 1- Proteza i-Limb [10] / Figure 1- The i-Limb prosthetic device [10]
Proteza i-Limb posed cinci degete, fiecare cu cte dou falange (gradul de mobilitate al mecanismului protezei fiind M=11). Sistemul de acionare cuprinde cinci motoare electrice de curent continuu plasate n palm i cuplate cu transmisii prin cabluri i fulii. Funcionarea ca i protez este permis de doi electrozi lipii pe pielea pacientului care colecteaz semnalele mioelectrice ale muchilor acestuia. Dei modern din toate punctele de vedere, i-Limb este un produs inaccesibil majoritii pacienilor cu amputaii. Preul de achiziie foarte ridicat reprezint un mare dezavantaj i a determinat o echip a Facultii de Mecanic din Craiova s demareze procesul de proiectare i fabricare a unei proteze pentru mn accesibile, moderne i performante. 3. Modelul CAD si simulri S-a pornit de la crearea modelului tridimensional al minii artificiale utiliznd mediul de dezvoltare SolidWorks. Dup aceast etap, modelul tridimensional a fost importat n ADAMS, soft care a permis realizarea unor simulri a comportamentului i funcionrii minii artificiale cu sau fr obiectul de
This anthropomorphic hand possesses five fingers, each with two phalanxes (the degree of freedom for the mechanism of the hand is M = 11). Te actuation is made by five DC motors placed in the palm. Working as prosthetic device is enabled by two electrodes bonded to the patient skin which collect the myoelectric signals from the muscles and transmit these signals, together with the information from the sensors, to a microprocessor. Although modern by all means, the i-Limb prosthetic device is a very expensive one. This, we considered to be a major shortcoming and challenged the team of the Faculty of Mechanics Craiova to create a low cost, modern, easy to install and live prosthetic device. 3. CAD model and simulations In the pursuit of constructing such a complex product we have studied all the similar solutions in terms of design, actuation systems, sensors, embedded control and materials. We started by creating a threedimensional model of the prosthesis using
Annals of the Constantin Brncu i University of Trgu Jiu, Engineering Series, Issue 1/2010
125
Analele Universit ii Constantin Brncu i din Trgu Jiu, Seria Inginerie, Nr. 1/2010
prehensat (vezi Figurile 4 si 5). Modelul mecanic al minii artificiale are 16 grade de libertate i a fost creat studiind n paralel sistemul de acionare, sistemul senzorial i cel de comand i control [11]. Sistemul de comand i control al unei proteze de ultim generaie trebuie s respecte urmtoarele condiii: � S aib n centru computerul; � S permit o integrare facil a unei mari varieti de senzori i actuatori; � S permit portabilitatea protezei (funcionarea independent de computer); � S aib un pre de cost competitiv. Dup un studiu complet al soluiilor similare ntlnite n cadrul sistemelor de control ale minilor robotice sau protezelor s-a decis combinarea computerului cu o plac de achiziie i comand dotat cu microprocesor care s comande precis servomotoarele de curent continuu ale fiecrui deget. Arborii de ieire ai celor cinci servomotoare care acioneaz degetele minii artificiale vor fi legai mecanic de falanga distal a fiecrui deget prin intermediul transmisiilor prin cabluri direcionate pe fuliile fiecrei falange [12 si 13]. Totodat, sistemul de comand i control al minii artificiale are rolul de a procesa informaiile culese de senzori de proximitate i de for (vezi Figurile 2 si 3).
SolidWorks CAD software which allowed us to perform simulations with the closing/opening of the fingers with or without object grasping (see Figures 4 and 5). The three-dimensional of the artificial hand, which comprises 16 D.O.F., was developed in relation to the actuation system and control system [11]. The control system of a modern prosthetic device has to respect the following goals: � To have in centre the computer; � To allow an easy integration of the sensors and actuators; � To permit prosthesis portability; � To be cost effective. After a thorough study of the similar solutions found in the control systems of many robotic or prosthetic hands we decided to combine computer with an acquisition board equipped with a microcontroller which commands the DC servomotors that drive the fingers. The output shaft of the five DC servomotors that actuate the fingers of the hand are mechanically connected with the distal phalanx (the tip of the finger) by means of cable transmissions routed on the fingers pulleys [12 and 13]. Proximity and force sensors have been also included in the control system of the prosthesis (see Figures 2 and 3).
Annals of the Constantin Brncu i University of Trgu Jiu, Engineering Series, Issue 1/2010
126
Analele Universit ii Constantin Brncu i din Trgu Jiu, Seria Inginerie, Nr. 1/2010
Figura 2 Modelul 3D rezultat, schema cinematic i acionarea unui deget al minii artificiale / Figure 2 The resulted three-dimensional model of the hand, the kinematic layout and the drive system of a finger
Figura 3 Sistemul mn-antebra i componentele sale / Figure 3 The hand-arm assembly and the components
Sistemul funcioneaz conform unui algoritm memorat de placa de comand i control. Acest algoritm este scris n limbajul de programare C/C++ pe computer i ncrcat n placa de achiziie i comand prin intermediul unui cablu USB A-B. Proteza este echipat cu cinci senzori de fort de tip FSR (Force Sesitive Resistor), cte unul pentru fiecare falang distal a degetelor. Informaia culeas de aceti senzori este folosit n scopul limitrii sau augmentrii forei de strngere pe care o dezvolt prehensorul asupra obiectului. Dac fora msurat depete o valoare prestabilit, atunci sistemul de comand i control va emite comenzi ctre actuatori astfel nct fora de strngere a obiectului s se diminueze. Aceast strategie de control poate fi aplicat atunci cnd utilizatorul
The system works according to a preset program implemented in the microcontroller internal memory. The program is written in C programming language into computer which communicates with the acquisition board via an USB A-B cable. The prosthesis is equipped with five FSR sensors (one for each phalange) for measuring the force between hand elements (phalanxes, palm) and grasped object. The information from the FSR sensors are used to limit or to augment the grasping force in relation to the nature of the external object. If the measured force exceeds a threshold value, then the control system commands the fingers to loosen a bit the object. This control strategy may be applied when the user manipulates soft or fragile objects (for example eggs, chips, grapes etc.) By contrast, if the measured force is smaller
Annals of the Constantin Brncu i University of Trgu Jiu, Engineering Series, Issue 1/2010
127
Analele Universit ii Constantin Brncu i din Trgu Jiu, Seria Inginerie, Nr. 1/2010
manevreaz obiecte fragile (de exemplu ou, chipsuri, struguri, roii etc.) Invers, dac fora msurat este mai mic dect valoarea prestabilit n algoritmul de control, atunci sistemul de control va comanda o strngere mai ferm. Un alt senzor utilizat are rolul de a msura distana pn la obiectul de prehensat. Acest senzor este de tip ultrasonic i este dispus n palma minii artificiale. Dac distana dintre palm i obiect este mai mic dect, de exemplu 3 cm, atunci mna artificial va prinde obiectul.
than the threshold value stored in the microcontroller memory then the control system can command a tighter grip. Another sensor used for this prosthetic device is an ultrasonic proximity sensor which measures the distance to the object that is going to be grasped. This sensor is located in the prosthesis palm. If the distance between palm and object is smaller than, for example, 3cm then, if desired, the hand will grasp the object.
Figura 4 Simulri ale prizei de for / Power grasps simulations
Figura 5 Simulri ale prizei de precizie (moned stnga i mner dreapta) / Precision grasp simulation (coin left and handle right)
4. Fabricaia primului prototip Desenele de execuie ale pieselor ce constituie mna artificial au fost create direct din softul de dezvoltare SolidWorks. Acesta reprezint unul dintre marile avantaje ale lucrului cu acest tip de softuri. Dup aceast etap procesul de fabricaie al pieselor a nceput. Materialul ales pentru primul prototip (aliaj de aluminiu) asigur o mas redus i
4. Fabrication The execution drawings have been created from the CAD virtual models of the parts. This is one of the major advantages of working with CAD software. Afterwards, the fabrication process of the parts has begun. The material chosen for this application is an aluminum alloy. The method of
Annals of the Constantin Brncu i University of Trgu Jiu, Engineering Series, Issue 1/2010
128
Analele Universit ii Constantin Brncu i din Trgu Jiu, Seria Inginerie, Nr. 1/2010
rezisten mecanic adecvat aplicaiei. Metoda de fabricaie este una tradiional prin achiere i cuprinde etape ca: strunjire, frezare, alezare, rectificare etc. Degetele minii artificiale au construcie modular, un deget fiind compus din 12 piese: trei falange, ase fulii i trei boluri, aa cum este ilustrat in Figura 6.
fabrication is based on traditional metal machining stages such as: lathing, drilling etc. The fingers of the hand have a modular construction, a finger assembly having 12 parts: 3 phalanxes, 6 pulleys and 3 bolts, as shown in Figure 6.
Figura 6 Modelul virtual vs. prototipul de deget / Figure 6 The virtual finger (left) vs. fabricated finger (right)
Dimensiunile rezultate pentru piesele care compun prototipul de mn mecanic sunt foarte apropiate de cele ale minii umane. n Figurile 7 i 8 se poate vizualiza prototipul de mn mecanic i o comparaie ntre acesta i o mn uman de dimensiuni medii.
The overall dimensions of the resulted hand prototype are very close to those of an average size human hand (see Figures 7 and 8). Therefore, the main characteristic of this artificial hand is a high degree of anthropomorphism.
Figura 7 Prototipul rezultat (vedere dorsal) Figura 8 Comparaie mna artificial - mna uman Figure 7 The assembled hand (dorsal view) Figure 8 The assembled hand (palm view)
Annals of the Constantin Brncu i University of Trgu Jiu, Engineering Series, Issue 1/2010
129
Analele Universit ii Constantin Brncu i din Trgu Jiu, Seria Inginerie, Nr. 1/2010
7. Concluzii Mna artificial prezentat n aceast lucrare este a doua dezvoltat integral n cadrul Facult ii de Mecanic din Craiova n cadrul tezei de doctorat intitulate: Contribu ii la studiul sistemelor mecanice de prehensiune . Aplica iile acestei noi mini mecanice antropomorfe pot fi g site n robotic (ca i end-effector pentru robo ii industriali sau humanoizi), n domeniul medical (ca i protez pentru mn sau membrul superior uman) sau chiar n domeniul universitar ca i instrument pentru studiul procesului complex al prehensiunii. 8. Acknowledgements Aceast lucrare a fost realizat cu sprijinul CNCSIS-UEFISCSU, grant 86/2007, Idei 92PNCDI 2. 9. Bibliografie 1. Jacobsen, S. C., Iversen, E. K., Knutti, D.F., Johnson, R.T., Biggers, K.B. Design of the UtahMIT Dexterous Hand, Proc. IEEE International Conference on Robotics and Automation, April 7-10, 1986; 2. Kargov, A., Asfour, T., Pylatiuk, C., Oberle, R., Klosek, H., Schulz, S., Regenstein, K., Bretthauer, G. Development of an Anthropomorphic Hand for a Mobile Assistive Robot , IEEE 9 th International Conference on Rehabilitation Robotics: Frontiers of the Human-Machine Interface, Chicago, Illinois, USA, June 28-July 1, 2005; 3. Shadow Robot Company , Design of a Dextrous Hand for Advanced CLAWAR Applications. Available from: http://www.shadowrobot.com/downlo
7. Conclusions The artificial hand presented in this paper is the second one developed entirely at the Faculty of Mechanics, University of Craiova under the Ph.D. programme called Acknowledgements regarding the mechanical prehension systems . The applications of this new developed artificial hand can be found in robotics (as an end-effector for industrial or humanoid robot), in medical prosthetic field (as a human hand or upper limb prosthesis) or in universities as an experimental tool to study the grasping process. 8. Acknowledgements This research activity was supported by CNCSIS-UEFISCSU, grant 86/2007, Idei 92 PNCDI 2. 9. Bibliography 1. Jacobsen, S. C., Iversen, E. K., Knutti, D.F., Johnson, R.T., Biggers, K.B. Design of the Utah-MIT Dexterous Hand, Proc. IEEE International Conference on Robotics and Automation, April 710, 1986; 2. Kargov, A., Asfour, T., Pylatiuk, C., Oberle, R., Klosek, H., Schulz, S., Regenstein, K., Bretthauer, G. - Development of an Anthropomorphic Hand for a Mobile Assistive Robot , IEEE 9 th International Conference on Rehabilitation Robotics: Frontiers of the Human-Machine Interface, Chicago, Illinois, USA, June 28July 1, 2005; 3. Shadow Robot Company , Design of a Dextrous Hand for Advanced CLAWAR Applications. Available
Annals of the Constantin Brncu i University of Trgu Jiu, Engineering Series, Issue 1/2010
130
Analele Universit ii Constantin Brncu i din Trgu Jiu, Seria Inginerie, Nr. 1/2010
ads/dextrous_hand_final.pdf; 4. Butterfass, J., Grebenstein, M., Liu, H., Hirzinger, G. - DLR Hand II: Next Generation of a Dextrous Robot Hand , In: Proc. IEEE Int. Conf. on Robotics and Automation 01, ICRA 01,Seoul, Korea, May 21-26, 2001; 5. Kawasaki, H., Shimomura, H., Shimizu, Y. Educationalindustrial complex development of an anthropomorphic robot hand Gifu hand , Advanced Robotics, Vol. 15, No.3, pp. 357-363, 2001; 6. Caffaz, A., Casalino, G., Cannata, G., Panin, G. and Massucco, E. The DIST-Hand, An Anthropomorphic, Fully Sensorized Dexterous Gripper , IEEE Humanoids 2000 Boston, September 2000; 7. Kaneko, K. Harada, K., Kanehiro, F. - Development of Multi-fingered Hand for Life-size Humanoid Robots , Proceedings of the IEEE International Conference on Robotics and Automation, Roma, Italy, 10-14 April 2007; 8. Sundar, N. Dexterous Robotic Hands: Kinematics and Control , MIT Artificial Intelligence Laboratory; 9. Stare u, I. Sisteme de prehensiune , Editura Lux Libris, Bra ov, 1996; 10. www.touchbionics.com; 11. Berceanu, C., Tarni , D. - A new fabrication method for a computer controlled artificial hand with electric actuators , International Journal of Modern Manufacturing Technologies (I.J.ModTech), Vol. I, pp. 13-17, ISSN 2067-3604, 2009; 12. Berceanu, C., Tarnita, D., Dumitru, S., Filip, D. - Forward and Inverse Kinematics Calculation for an Anthropomorphic Robotic Finger, ISI Proceedings of the 3 rd European Conference on Mechanism Science EUCOMES 2010, Cluj-Napoca, Romania, September 14-18, 2010,
from: http://www.shadowrobot.com/dow nloads/dextrous_hand_final.pdf; 4. Butterfass, J., Grebenstein, M., Liu, H., Hirzinger, G. - DLR Hand II: Next Generation of a Dextrous Robot Hand , In: Proc. IEEE Int. Conf. on Robotics and Automation 01, ICRA 01,Seoul, Korea, May 21-26, 2001; 5. Kawasaki, H., Shimomura, H., Shimizu, Y. Educationalindustrial complex development of an anthropomorphic robot hand Gifu hand , Advanced Robotics, Vol. 15, No.3, pp. 357-363, 2001; 6. Caffaz, A., Casalino, G., Cannata, G., Panin, G. and Massucco, E. - The DIST-Hand, An Anthropomorphic, Fully Sensorized Dexterous Gripper , IEEE Humanoids 2000 Boston, September 2000; 7. Kaneko, K. Harada, K., Kanehiro, F. - Development of Multi-fingered Hand for Life-size Humanoid Robots , Proceedings of the IEEE International Conference on Robotics and Automation, Roma, Italy, 10-14 April 2007; 8. Sundar, N. Dexterous Robotic Hands: Kinematics and Control , MIT Artificial Intelligence Laboratory; 9. Stare u, I. Sisteme de prehensiune , Editura Lux Libris, Bra ov, 1996; 10. www.touchbionics.com; 11. Berceanu, C., Tarni , D. - A new fabrication method for a computer controlled artificial hand with electric actuators , International Journal of Modern Manufacturing Technologies (I.J.ModTech), Vol. I, pp. 13-17, ISSN 2067-3604, 2009; 12. Berceanu, C., Tarnita, D., Dumitru, S., Filip, D. - Forward
Annals of the Constantin Brncu i University of Trgu Jiu, Engineering Series, Issue 1/2010
131
Analele Universit ii Constantin Brncu i din Trgu Jiu, Seria Inginerie, Nr. 1/2010
paper published in the book New Trends in Mechanisms Science: Mechanisms and Control, edited by Springer; 13. Berceanu, C., Tarnita, D. Mechanical Design and Control Issues of a Dexterous Robotic Hand , submitted and accepted for ISI Proceedings of 2010 International Conference on Optimization of the Robots and Manipulators, Calimanesti-Caciulata, Romania, 2830 May, 2010
and Inverse Kinematics Calculation for an Anthropomorphic Robotic Finger, ISI Proceedings of the 3 rd European Conference on Mechanism Science EUCOMES 2010, Cluj-Napoca, Romania, September 14-18, 2010, paper published in the book New Trends in Mechanisms Science: Mechanisms and Control, edited by Springer; 13. Berceanu, C., Tarnita, D. Mechanical Design and Control Issues of a Dexterous Robotic Hand , submitted and accepted for ISI Proceedings of 2010 International Conference on Optimization of the Robots and Manipulators, CalimanestiCaciulata, Romania, 28-30 May, 2010
Annals of the Constantin Brncu i University of Trgu Jiu, Engineering Series, Issue 1/2010
132
S-ar putea să vă placă și
- C Elemente GeneraleDocument13 paginiC Elemente Generalepablo_genezaÎncă nu există evaluări
- Daewoo Espero - Manual de Intretinere Si ReparatiiDocument995 paginiDaewoo Espero - Manual de Intretinere Si Reparatiimorsaceamare67% (6)
- Cement Are ADocument11 paginiCement Are Apablo_genezaÎncă nu există evaluări
- Cotare TextDocument8 paginiCotare TextSofianos ValentinÎncă nu există evaluări
- Heidenhain RomanaDocument519 paginiHeidenhain RomanaNicolae RaduÎncă nu există evaluări
- Rudolf Diesel Si Motorul Care-Poarta NumeleDocument10 paginiRudolf Diesel Si Motorul Care-Poarta Numelepablo_genezaÎncă nu există evaluări