Documente Academic
Documente Profesional
Documente Cultură
C IS Modele Parametrice pp#C1-C15 PDF
Încărcat de
pozitiv22Titlu original
Drepturi de autor
Formate disponibile
Partajați acest document
Partajați sau inserați document
Vi se pare util acest document?
Este necorespunzător acest conținut?
Raportați acest documentDrepturi de autor:
Formate disponibile
C IS Modele Parametrice pp#C1-C15 PDF
Încărcat de
pozitiv22Drepturi de autor:
Formate disponibile
1/15
Anexa C. Modele parametrice
Forma
Forma general
general
y[ n] = H( q 1 , )u[ n] + G( q 1 , )e[ n]
T
E{e[ n ]e [ m]} = ( )0 [ n m]
n, m N
u R nu Vectorul semnalelor de stimul (intrare).
y R ny Vectorul semnalelor de rspuns (ieire).
e R ny Vectorul perturbaiilor externe, de tip zgomot alb. ( ) R nyny Matricea corelaiilor
( ) 0
** Exist
tea perturba
ii scalare
Exist tot
tot at
attea
perturbaii
scalare
ccte
te canale
ire msurabile
canale de
de ie
ieire
msurabile..
Componentele perturbaiilor nu sunt
Vectorul parametrilor necunoscui.
corelate ntre ele la diferite momente de
timp (vezi simbolul lui Kornecker).
Dac matricea este diagonal, diferitele
componente ale perturbaiilor nu sunt
corelate ntre ele la acelai moment de
timp.
indice structural ** De
De asemenea
asemenea
necunoscut
necunoscut..
q 1 Operatorul de ntrziere cu un pas.
( q f )[ n] =
1
Generalizare
Generalizare
qk
def
dintre perturbaii.
f [ n 1]
n Z
Operatorul de translatare temporal cu |k| pai.
( q f ) [ n] = f [ n k ]
k
def
k,n Z
C.1
2/15
C. Modele parametrice
Efectul
Efectul practic
practic al
al operatorului
operatorului
de
de translatare
translatare temporal
temporal
f
Propriet
i
Proprieti
Convenie: q0 f f
Liniaritate: q k (f + g ) ( q k f ) + ( q k g )
n0
devansare
Principiul cumulrii deplasrilor temporale:
q k q m q( m+ k )
k <0
q + |k | f
0 n0+k
f
n0
ntrziere
q
0
y[ n] = H( q 1 , )u[ n] + G( q 1 , )e[ n]
T
E{e[ n]e [ m]} = ( )0 [ n m]
n, m N
H( q 1 , ) R nynu Matricea de sistem a filtrului util.
k >0
n0 n0+k
m, k Z
|k |
** Tipul
ii sugereaz
Tipul inegalit
inegalitii
sugereaz
sensul
sensul deplasrii
deplasrii temporale
temporale..
G( q 1 , ) R nyny Matricea de sistem a filtrului de zgomot.
e din elemente raionale, adic
Uzual, aceste matrici sunt format
-1
rapoarte de polinoame n q-1.
Coeficienii polinoamelor fac parte din vectorul parametrilor necunoscui,
iar gradele lor sunt indicii structurali ai modelului .
C.2
C. Modele parametrice
3/15
Ipoteze
Ipoteze fundamentale
fundamentale
IN!
IN!11
Tubcjmjubuf
Tubcjmjubuf
Att matricea de sistem a filtrului util H( q , ) ct i matricea de sistem a
1
filtrului de zgomot G( q , ) trebuie s fie (asimptotic) stabile.
IN!
IN!22 Dbv{bmjubuf
Dbv{bmjubuf
Cele dou filtre trebuie s fie realizabile fizic (implementbile).
1
1
Aceasta revine la proprietatea ca matricile de sistem H( q , ) i G( q , )
s fie cauzale (adic toate secvenele pondere implicate s fie nule n
stnga originii timpului normalizat).
IN!
.jftjsf
IN!33 Usbotnjtjf
Usbotnjtjf jousbsf
jousbsf.jftjsf
,
Intrarea nu se poate transmite instantaneu la ieire. Filtrul util posed un
timp mort intrinsec de cel puin o perioad de eantionare.
Aceasta revine la: H(0, ) = 0 nynu (matricea nul).
IN!
IN!44 Usbotnjtjf
Usbotnjtjf qfsuvscbujf
qfsuvscbujf.jftjsf
,
, .jftjsf
Perturbaia se transmite ntotdeauna instantaneu la ieire.
Msurtorile sunt ntotdeauna afectate de un zgomot instantaneu.
Aceasta revine la: G(0, ) = I ny (matricea unitate).
C.3
4/15
C. Modele parametrice
Ipoteze
Ipoteze fundamentale
fundamentale (final)
(final)
IN!
IN!55 Ejtusjcvujb
Ejtusjcvujb
Hbvttjbob
, Hbvttjbob
n absena altor specificaii, densitile de probabilitate ale componentelor
perturbaiei sunt n mod implicit Gaussiene.
Aceste ipoteze sunt destul de naturale (puin restrictive).
Ipoteza stabilitii este uneori nlocuit prin:
IN!(
wbsjboub *
IN!(11 Tubcjmjubuf
Tubcjmjubuf ))wbsjboub*
Urmtoarele matrici de sistem trebuie s fie asimptotic stabile:
1
1
1
i G ( q , )H( q , ) .
G 1 ( q 1 , )
Aceasta corespunde unei ecuaii generale n care filtrul de zgomot apare inversat
(dac este posibil).
G 1 ( q 1 , )y[ n] G 1 ( q 1 , )H( q 1 , )u[ n] = e[ n]
T
E{e[ n ]e [ m]} = ( )0 [ n m]
n, m N
** Exprimare
n eviden
faptul
Exprimare care
care pune
pune n
eviden
faptul c
c prin
prin filtrarea
filtrarea cu
cu inversul
inversul
filtrului
ei dintre
filtrului de
de zgomot
zgomot aa diferen
diferenei
dintre datele
datele msurate
msurate ii cele
cele
simulate
ine zgomotul
iilor.
simulate se
se ob
obine
zgomotul alb
alb generator
generator al
al perturba
perturbaiilor.
C.4
5/15
C. Modele parametrice
Clase
Clase uzuale
uzuale de
de modele
modele liniare
liniare
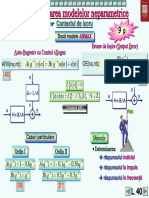
ARMAX
Clasa ARMAX
ARMAX[na,nb,nc,nk
ARMAX[na,nb,nc,nk]]
indici
ntrziere
structurali intrinsec
Uzual
Uzual
nk = 1
RSISO
De stare
A( q 1 ) y[ n] = B( q 1 )u[ n] + C ( q 1 )e[ n]
2
E
{
e
[
n
]
e
[
m
]}
=
0 [ n m ]
n, m N
A( q 1 ) = 1 + a1q 1 +
B( q 1 ) = (b1q 1 +
ARMAX[na,nb,nc
ARMAX[na,nb,nc]]
C ( q 1 ) = 1 + c q 1 +
1
A( q 1 ) y[ n] = y[ n] + a1 y[ n 1] + a2 y[ n 2] +
+ ana q na
+ bnb q nb )q1 nk
(polinoame)
+ cnc q nc
+ ana y[ n na ] Componenta Auto-Regresiv
valori regresate n timp ale ieirii
C ( q 1 )e[ n] = e[ n] + c1e[ n 1] + c2 e[ n 2] +
+ cnc e[ n nc ] Componenta de Medie Alunectoare
(auto-regresiv n perturbaie)
B( q 1 )u[ n] = b1u[ n nk ] + b2 u[ n nk 1] +
(auto-regresiv n intrare)
+ bnb u[ n nk nb + 1] Componenta de control
eXogen
C.5
6/15
C. Modele parametrice
Clasa ARMAX
Ecuaie
Ecuaie cu
cu diferene
diferene
y[ n] + a1 y[ n 1] + a2 y[ n 2] +
+ ana y[ n na ] = b1u[ n nk ] + b2 u[ n nk 1] + + bnb u[ n nk nb + 1] +
+ e[ n] + c1e[ n 1] + c2 e[ n 2] + + cnc e[ n nc ]
** Analogul
n timp
Analogul n
timp discret
discret al
al conceptului
conceptului de
de
n N
ecua
ie diferen
ial.
ecuaie
diferenial.
y (t ) + a1 y (t ) + a2 y (t ) +
+ ana y ( na ) (t ) = b1u(t ) + b2 u(t ) +
+ bnb u ( nb ) (t ) +
+ e(t ) + c1e(t ) + c2 e(t ) +
Determinarea
Determinarea modelului
modelului de
de identificare
identificare din
din date
date
achiziionate la intrarea i ieirea unui proces.
Obiectiv achiziionate la intrarea i ieirea unui proces.
indicii scructurali: na nb nc
2
dispersia zgomotului alb:
1
1
1
A( q ) y[ n] = B( q )u[ n] + C ( q )e[ n]
2
Este
E{e[ n]e[ m]} = 0 [ n m]
n, m N
DA
t R+
Rezolvarea
iei cu
e,
Rezolvarea ecua
ecuaiei
cu diferen
diferene,
plecnd de la o iniializare dat.
Obiectiv plecnd de la o iniializare dat.
parametrii: {ai }i1,na {bi }i1,nb {ci }i1,nc
Necunoscutele
Necunoscutele
modelului
modelului
+ cnc e( nc ) (t )
n
n mod
ntrzierea intrinsec
mod normal,
normal, ntrzierea
intrinsec
este
este cunoscut
cunoscut,, altfel
altfel ea
ea este
este implicit
implicit
considerat
considerat unitar
unitar..
clasa ARMAX un caz particular al modelului general de identificare?
B( q 1 )
C ( q 1 )
u[ n] +
e[ n]
y[ n] =
1
1
A
q
A
q
(
)
(
)
E{e[ n]e[ m]} = 2 [ n m]
n, m N
0
B ( q 1 )
H ( q , ) =
= H ( q 1 )
1
A( q )
1
def
C ( q 1 )
G( q , ) =
= G ( q 1 )
1
A( q )
1
def
SISO
C.6
7/15
C. Modele parametrice
Clasa ARMAX
Reprezentare
Reprezentare sistemic
sistemic
Ce legtur exist cu funciile de transfer
din TS?
Filtru de zgomot
def
C ( q 1 )
GG
(G
q 1
)=C/A
C/A
A( q 1 )
Funcii
Funcii de
de
sistem
sistem
Filtru de sistem
u
def
B ( q 1 )
HH
(H
q 1
) =B/A
B/A1
A( q )
Exemplu
Exemplu
Cele
Cele dou
dou concepte
concepte reprezint
reprezint matematic
matematic
entit
i cu
entiti
cu naturi
naturi diferite
diferite,, dar
dar se
se construiesc
construiesc
folosind
i coeficien
i ((parametri).
parametri).
folosind aceia
aceiai
coeficieni
Funcie
Funcie
de
de sistem
sistem
Operator
ioneaz asupra
Operator care
care ac
acioneaz
asupra unor
unor
func
ii definite
funcii
definite pe
pe un
un domeniu
domeniu temporal
temporal..
Funcie
Funcie de
de
transfer
transfer
Func
ie complex
Funcie
complex exprimat
exprimat cu
cu ajutorul
ajutorul
Transformatelor
Transformatelor Laplace
Laplace sau
sau ZZ..
Filtrul
Filtrul de
de sistem
sistem cu
cu ntrziere
ntrziere unitar
unitar
Teorema
ntrzierii ((TZ)
TZ)
Teorema ntrzierii
Funcie
Funcie de
de sistem
sistem
Z ( q 1h )( z ) = z 1Z ( h )( z )
b1q 1 + + bnb q nb
B( q 1 )
=
H (q ) =
A( q 1 ) 1 + a1q 1 + + ana q na
Coresponden
remarcabil
Coresponden
remarcabil
def
Funcie
Funcie de
de transfer
transfer
1
H ( z ) = H (q )
q 1 = z 1
=z
na nb
b1 z nb 1 + + bnb
z na + a1 z na 1 + + ana
q 1
z 1
** Func
ia de
Funcia
de sistem
sistem este
este mai
mai bine
bine adaptat
adaptat
contextului
n timp
ia de
contextului IS
IS ii PS
PS,, n
timp ce
ce func
funcia
de transfer
transfer
este
este specific
specific domeniului
domeniului TS
TS..
C.7
8/15
C. Modele parametrice
Clasa ARMAX
Funcia
Funcia de
de sistem
sistem poate
poate fifi utilizat
utilizat n
n rezolvarea
rezolvarea ecuaiilor
ecuaiilor cu
cu diferene
diferene
Exemplu
Exemplu
Funcie
Funcie de
de sistem
sistem raional
raional
b1q 1 + + bnb q nb
B( q 1 )
=
H (q ) =
A( q 1 ) 1 + a1q 1 + + ana q na
1
def
y H ( q 1 )u
Dou
Dou tehnici
tehnici de
de
determinare
irii
determinare aa ie
ieirii
Iterativ (practic)
Ini
ializare
Iniializare
u[ na nb] u[ na nb + 1]
y[0] y[1]
u[ na 1]
y[ na 1]
na+nb) date.
** ((na+nb)
date.
Iterare
Iterare
y[ na ] = a1 y[ na 1] a2 y[ na 2] ana y[0] +
+b1u[ na 1] + b2 u[ na 2] + + bnb u[ na nb]
y[ na + 1] = a1 y[ na ] a2 y[ na 1] ana y[1] +
+b1u[ na ] + b2 u[ na 1] + + bnb u[ na nb + 1]
y[ n] = a1 y[ n 1] a2 y[ n 2] ana y[ n na ] +
+b1u[ n 1] + b2 u[ n 2] + + bnb u[ n nb] n na
\
B
A
Direct (teoretic)
Prin
mprirea infinit
Prin mprirea
infinit aa polinoamelor
polinoamelor
b1q 1 + b2 q 2 +
b1q 1 a1b1q 2
+ bnb q nb 1 + a1q 1 + a2 q 2 +
+ ana q na
b1q 1 + (b2 a1b1 )q 2 +
(b2 a1b1 )q 2 + (b3 a2 b1 )q 3 +
2
( a1b1 b2 )q + a1 ( a1b1 b2 )q +
1
2
[(b3 a2b1 ) + a1 ( a1b1 b2 )] q 3 +
y[ n] H ( q 1 )u[ n] = m u[ n m 1]
m0
** Neimplementabil
Neimplementabil..
nN
C.8
9/15
C. Modele parametrice
Clasa ARMAX
Vectorul
Vectorul parametrilor
parametrilor necunoscui
necunoscui
Natural
Extins
def
T = a1 a2
ana
n = na + nb + nc
b1 b2
bnb
c1 c2
cnc
++
def
T = a1 a2
ana
b1 b2
bnb
** Rareori
Rareori utilizat
utilizat..
2
n = na + nb + nc + 1
c1 c2
cnc
Cum se pot verifica ipotezele fundamentale?
A( q 1 ) = 1 + a1q 1 +
b0 = 0
IN!
.jftjsf
IN!33 Usbotnjtjf
Usbotnjtjf jousbsf
jousbsf.jftjsf
,
IN!
IN!44 Usbotnjtjf
Usbotnjtjf qfsuvscbujf
qfsuvscbujf.jftjsf
, .jftjsf
,
IN!
IN!11
cercul
unitar
1
1
B( q ) = (b1q +
C ( q 1 ) = 1 + c q 1 +
1
c0 0
Tubcjmjubuf
Tubcjmjubuf
+ ana q na
+ bnb q nb )q1 nk
+ cnc q nc
Deoarece ambele filtre au aceiai poli, dai de polinomul A, modelul ARMAX este stabil
dac i numai dac polinomul A este stabil.
Exemplu
Exemplu
(z) trebuie
Polii
n discul
Polii lui
lui A
A(z)
trebuie s
s fie
fie n
discul unitar
unitar..
A( z ) = z na ( z na + a1 z na 1 +
** Stabilitatea
Stabilitatea polinoamelor
polinoamelor sistemelor
sistemelor
liniare
liniare discrete
discrete se
se testeaz
testeaz cu
cu
ajutorul
r-Cohn.
ajutorul Criteriului
Criteriului Sch
Schr-Cohn.
+ ana )
Stabil
h[ n] = a
n 0
n 0
def
Sistem
Sistem de
de H ( q 1 ) = 1
1 + aq 1
ordin
ordin II
h[ n] <
n 0
( a ) n
h[ n] =
0
, n0
, n<0
1
secvena pondere cauzal
| a |< 1
1 a
C.9
C. Modele parametrice
10/15
Clasa ARMAX
Modele
Modele particulare
particulare uzuale
uzuale [[z{{
z{{]]
ARX[na,nb
,<nk>] Auto-Regresiv, cu control eXogen
ARX[na,nb,<nk>]
A( q 1 ) y[ n] = B( q 1 )u[ n] + e[ n]
2
E{e[ n]e[ m]} = 0 [ n m]
n, m N
Utilizat n special n comanda numeric a proceselor
i/sau reglarea automat.
Dei nu att de precis ca alte modele, el este adesea
preferat pentru simplitate i pentru faptul c
1
C(q ) = 1
nu necesit metode de identificare complicate.
n plus, modelul poate fi folosit i n aplicaii de timp real, beneficiind de
metode de identificare adaptive extrem de eficiente.
AR[na
AR[na]] Auto-Regresiv
A( q 1 ) y[ n] = e[ n]
2
E{e[ n]e[ m]} = 0 [ n m]
Utilizat n special n predicia optimal a datelor (fiind
un model de zgomot i nu de date utile), n aplicaii de
predicie a seriilor de timp, de estimare spectral, de
compresie a datelor, de prelucrare a semnalului vocal,
n, m N
1
1
B( q ) = 0 C ( q ) = 1
de urmrire a intelor mobile, etc.
n pofida preciziei sale modeste, este utilizat n att de multe i diverse aplicaii, datorit
manierei recursive n care se pot determina parametrii si, chiar i atunci cnd nu este
implementat n timp real.
Algoritmul
-Durbin
Algoritmul Levinson
Levinson-Durbin
(care va fi prezentat la Masterat)
C.10
11/15
C. Modele parametrice
Clasa ARMAX
Modele
Modele particulare
particulare uzuale
uzuale [[zz{
zz{]]
MA[nc
MA[nc]] Medie Alunectoare
y[ n] = C ( q 1 )e[ n]
2
E{e[ n]e[ m]} = 0 [ n m]
A( q 1 ) = 1 B( q 1 ) = 0
n, m N
Model care se refer tot la perturbaii.
Utilitate redus, din cauza preciziei extrem de sczute
sau a numrului mare de parametri necesari pentru a
asigura o precizie satisfctoare.
ARMA[na,nc
] Auto-Regresiv, de Medie Alunectoare
ARMA[na,nc]
A( q 1 ) y[ n] = C ( q 1 )e[ n]
2
E{e[ n]e[ m]} = 0 [ n m]
Model de perturbaii mai precis, bazat pe un filtru care
dispune att de poli, ct i de zerouri.
Masiv integrat n aplicaii abia n anii 90, datorit
nivelului tehnologic care a permis implementarea
n, m N
B ( q 1 ) = 0
acestora n variante eficiente.
date msurate
date simulate
OE[na,nb
,<
nk
>]
O
utput
E
rror
(
eroare
de
ie
ire
)
OE[na,nb,<nk>]
B ( q 1 )
eroare
1
1
1
A( q ) y[ n] = B( q )u[ n] + A( q )e[ n]
y
n
u
n
e
n
[
]
[
]
[
]
de ieire
A( q 1 )
E{e[ n]e[ m]} = 0 [ n m]
2
n, m N
E{e[ n]e[ m]} = 0 [ n m]
A( q ) = C ( q )
Acest model este mai precis dect modelul ARX, dar metodele
pentru determinarea parametrilor si sunt mult mai complexe.
n, m N
C.11
12/15
C. Modele parametrice
Clasa ARMAX
Modele
Modele particulare
particulare uzuale
uzuale [[zzz
zzz]]
FIR[nb
,<nk>] Finite Impulse Response
FIR[nb,<nk>]
(cu rspuns finit la impuls / secven pondere de durat finit)
y[ n] = C
B( q 1 )ue[ n] + e[ n]
2
E{e[ n]e[ m]} = 0 [ n m]
A( q 1 ) = 1 C ( q 1 ) = 1
h[1]
y[ n] = h[ k ] ( q nk u ) [ n k ] + e[ n ]
k =0
n N
n, m N
y[ n] = b1 u[ n nk ] + b2 u[ n nk 1] +
h[0]
nb 1
+ bnb u[ n nk nb + 1] + e[ n]
n N
h[ nb 1]
Precizia modelului este redus, dar el este adesea utilizat pentru a
detecta ordinul minim de persisten al intrrii necesar pentru obinerea
de date corecte i consistente (cu ajutorul ecuaiei Wiener-Hopf).
** De
Modelele din clasa ARMAX se pot exprima i cu ajutorul
modelul ARX
ARX este
este de
de
Deii modelul
secvenelor pondere (prin tehnica mpririi infinite).
tip
t
tip IIR
IIR,, el
el nu
nu necesit
necesit dec
dect
Acestea pot fi de tip:
un
un numr
numr finit
finit de
de parametri
parametri..
B ( q 1 )
1
n
= h[ n]q
H (q ) =
A( q 1 ) n 0
FIR
FIR Finite Impulse Response
(cu rspuns finit la impuls)
C ( q 1 )
1
n
= g[ n]q
G( q ) =
IIR
IIR Infinite Impulse Response
A( q 1 ) n 0
(cu rspuns infinit la impuls)
C.12
13/15
C. Modele parametrice
Clase
Clase uzuale
uzuale de
de modele
modele liniare
liniare
ARMAX
RSISO
Clasa RSISO
Modele
Modele de
de tip
tip SISO
SISO Raionale
Raionale
RSISO[na,nb,nc,nd,nf
,<nk>]
RSISO[na,nb,nc,nd,nf,<nk>]
indici
structurali
ntrziere
intrinsec
e
Reprezentare
Reprezentare sistemic
sistemic
Filtru de zgomot
G
C/(AD)
G C/(AD)
Filtru de sistem
u
H
H B/(AF)
B/(AF)
De stare
1
1
(
)
(
)
B
q
C
q
1
u[ n] +
e[ n]
A( q ) y[ n] =
1
1
F (q )
D( q )
E{e[ n]e[ m]} = 2 [ n m]
0
A( q ) = 1 + a1q +
1
1
B( q ) = (b1q +
C ( q 1 ) = 1 + c q 1 +
1
D( q 1 ) = 1 + d1q 1 +
1
1
=
+
+
F
(
q
)
1
f
q
+ ana q
na
n, m N
+ bnb q nb )q1 nk polinoame
+ cnc q nc
+ d nd q nd
+ f nf q nf
+
polinoame
coprime
( D, F ) = 1
def
B ( q 1 )
C ( q 1 )
1
(cmmdc)
H (q ) =
G( q ) =
1
1
1
1
A( q ) F ( q )
A( q ) D( q )
1
def
** Pot
ns,
Pot exista
exista,, ns,
ambele filtre (de sistem i de zgomot) s aib aceiai poli.
poli
poli comuni
comuni..
Se elimin restricia impus n cadrul clasei ARMAX ca
C.13
14/15
C. Modele parametrice
Clasa RSISO
Modele
Modele particulare
particulare uzuale
uzuale
ARMAX[na,nb,nc
,<nk>]
ARMAX[na,nb,nc,<nk>]
RSISO[na,nb,nc,
0,0,<nk>]
RSISO[na,nb,nc,0,0,<nk>]
D ( q 1 ) = 1 F ( q 1 ) = 1
** Clasa
bogat) dec
t aceasta
Clasa RSISO
RSISO include
include clasa
clasa ARMAX
ARMAX,, fiind
fiind mai
mai general
general ((bogat)
dect
aceasta..
Modelele
Modelele clasei
clasei ARMAX
ARMAX sunt
sunt ii modele
modele ale
ale clasei
clasei RSISO
RSISO..
n aplicaii sunt ns utilizate i modele de tip RSISO
care nu fac parte din clasa ARMAX.
FIFN[nb,nc,nd,nf
,<nk>] Filtered Input Filtered Noise
FIFN[nb,nc,nd,nf,<nk>]
(intrare i zgomot filtrate independent)
BJ[nb,nc,nd,nf
,<nk>] Box Jenkins (denumire echivalent)
BJ[nb,nc,nd,nf,<nk>]
Filtrul de sistem i filtrul de zgomot
B( q 1 )
C ( q 1 )
nu au poli comuni, fapt care justific
u[ n] +
e[ n]
y[ n] =
1
1
F (q )
D( q )
prima denumire a modelului.
E{e[ n]e[ m]} = 2 [ n m]
Decuplarea dintre partea util i cea parazit
0
este necesar n aplicaiile unde sursa de
n, m N
1
zgomot este independent de proces.
A( q ) = 1
n mod normal, acest model de identificare ar fi cel mai recomandat n majoritatea
aplicaiilor, dac implementarea sa nu ar fi att de dificil, din cauza complextii ridicate.
C.14
15/15
C. Modele parametrice
Clase
Clase uzuale
uzuale de
de modele
modele liniare
liniare
ARMAX
RSISO
De stare
Clasa modelelor de stare
x[ n + 1] A( )x[ n] + B( )u[ n] + E( ) w[ n]
y[ n] C( )x[ n] + F( )e[ n]
T
E
{
e
[
n
]
e
[ m]} = e ( )0 [ n m]
T
E
{
w
[
n
]
w
[ m]} = w ( )0 [ n m]
E{e[ n]wT [ m]} = () [ n m]
e,w
0
Vectorul parametrilor necunoscui
include coeficienii matricilor
implicate n ecuaiile modelului.
Rareori zgomotul intern (w) i cel
extern (e) apar mpreun ntr-un
model de stare.
n general modelele cu dou surse
de zgomot sunt evitate,
ncercndu-se echivalarea lor cu
ajutorul unor modele avnd o
n, m N singur surs de zgomot.
Dac este totui necesar prezena ambelor zgomote, se presupune c ele sunt necorelate.
e , w ( ) 0
Complexitatea modelelor de stare este, n general, ridicat.
Este acesta un caz
particular al modelului
general de identificare?
DA
TS
def
H( q , ) = C( ) ( qI A( ) ) B( )
1
G( q 1 , )
Factorizare
Factorizare spectral
spectral ++
Predic
Predicie
ie de
de stare
stare prin
prin filtrare
filtrare Kalman
Kalman
C.15
S-ar putea să vă placă și
- Exemplu GB PDFDocument2 paginiExemplu GB PDFpozitiv22Încă nu există evaluări
- 12 IS Curs pp#213-230 PDFDocument19 pagini12 IS Curs pp#213-230 PDFpozitiv22Încă nu există evaluări
- Exemplu A PDFDocument2 paginiExemplu A PDFpozitiv22Încă nu există evaluări
- A IS Modele Statistice pp#A1-A29 PDFDocument29 paginiA IS Modele Statistice pp#A1-A29 PDFpozitiv22Încă nu există evaluări
- Exemplu GA PDFDocument1 paginăExemplu GA PDFpozitiv22Încă nu există evaluări
- A IS Modele Statistice pp#A1-A29 PDFDocument29 paginiA IS Modele Statistice pp#A1-A29 PDFpozitiv22Încă nu există evaluări
- 07 IS Lab pp#L115-L131 PDFDocument17 pagini07 IS Lab pp#L115-L131 PDFpozitiv22Încă nu există evaluări
- 11 IS Curs pp#198-212 PDFDocument15 pagini11 IS Curs pp#198-212 PDFpozitiv22Încă nu există evaluări
- B IS Modele Neparametrice pp#B1-B9 PDFDocument9 paginiB IS Modele Neparametrice pp#B1-B9 PDFpozitiv22Încă nu există evaluări
- 10 IS Curs pp#180-197 PDFDocument18 pagini10 IS Curs pp#180-197 PDFpozitiv22Încă nu există evaluări
- 11 IS Curs pp#198-212 PDFDocument15 pagini11 IS Curs pp#198-212 PDFpozitiv22Încă nu există evaluări
- 05 IS Curs pp#73-90 PDFDocument18 pagini05 IS Curs pp#73-90 PDFpozitiv22Încă nu există evaluări
- 12 IS Curs pp#213-230 PDFDocument19 pagini12 IS Curs pp#213-230 PDFpozitiv22Încă nu există evaluări
- 09 IS Curs pp#161-179 PDFDocument19 pagini09 IS Curs pp#161-179 PDFpozitiv22Încă nu există evaluări
- 05 IS Curs pp#82-105 PDFDocument24 pagini05 IS Curs pp#82-105 PDFpozitiv22Încă nu există evaluări
- 06 IS Curs pp#91-111 PDFDocument21 pagini06 IS Curs pp#91-111 PDFpozitiv22Încă nu există evaluări
- 07 IS Curs pp#126-144 PDFDocument19 pagini07 IS Curs pp#126-144 PDFpozitiv22Încă nu există evaluări
- 06 IS Lab pp#L100-L114 PDFDocument15 pagini06 IS Lab pp#L100-L114 PDFpozitiv22Încă nu există evaluări
- 06 IS Curs pp#106-125 PDFDocument20 pagini06 IS Curs pp#106-125 PDFpozitiv22Încă nu există evaluări
- 08 IS Lab pp#L132-L138 PDFDocument7 pagini08 IS Lab pp#L132-L138 PDFpozitiv22Încă nu există evaluări
- 02 IS Curs pp#8-31 PDFDocument24 pagini02 IS Curs pp#8-31 PDFpozitiv22Încă nu există evaluări
- 04 IS Curs pp#53-72 PDFDocument20 pagini04 IS Curs pp#53-72 PDFpozitiv22Încă nu există evaluări
- 03 IS Lab pp#L40-L62 PDFDocument23 pagini03 IS Lab pp#L40-L62 PDFpozitiv22Încă nu există evaluări
- 08 IS Curs pp#145-160 PDFDocument16 pagini08 IS Curs pp#145-160 PDFpozitiv22Încă nu există evaluări
- Lab ISDocument22 paginiLab ISAndraȘtefanaÎncă nu există evaluări
- 03 IS Curs pp#32-52 PDFDocument21 pagini03 IS Curs pp#32-52 PDFpozitiv22Încă nu există evaluări
- 04 IS Lab pp#L63-L74Document12 pagini04 IS Lab pp#L63-L74Ovidiu CraiuÎncă nu există evaluări
- 00 IS Lab TiSuBi pp#L1-L5 PDFDocument6 pagini00 IS Lab TiSuBi pp#L1-L5 PDFpozitiv22Încă nu există evaluări
- 03 IS Curs pp#32-52 PDFDocument21 pagini03 IS Curs pp#32-52 PDFpozitiv22Încă nu există evaluări