S-ar putea să vă placă și
- Otezelor 2Document64 paginiOtezelor 2Mihaela IzmanÎncă nu există evaluări
- 12 Curs EconometrieDocument28 pagini12 Curs EconometrieVlada JitariucÎncă nu există evaluări
- Curs13 Econometrie Ipoteze Norm Necorel Colin PDFDocument66 paginiCurs13 Econometrie Ipoteze Norm Necorel Colin PDFLoRe LtkÎncă nu există evaluări
- Curs EconometrieDocument66 paginiCurs EconometrieAndrei AgapeÎncă nu există evaluări
- Ipoteze RezolvatDocument14 paginiIpoteze RezolvatI'm a StarÎncă nu există evaluări
- Curs5 IPOTEZEDocument82 paginiCurs5 IPOTEZECătălin MogoşÎncă nu există evaluări
- Curs10 Econometrie Ipoteze DV 2014Document38 paginiCurs10 Econometrie Ipoteze DV 2014Ursu AlexandraÎncă nu există evaluări
- Curs10 Econometrie Ip Med HomoscDocument42 paginiCurs10 Econometrie Ip Med HomoscMatei Stefan VladÎncă nu există evaluări
- Econometrie: Curs 12Document22 paginiEconometrie: Curs 12asdfgÎncă nu există evaluări
- Econometrie C3 1 RLSDocument11 paginiEconometrie C3 1 RLSVictoria PuicaÎncă nu există evaluări
- C4 C7 Econometrie 2015 CBalanDocument44 paginiC4 C7 Econometrie 2015 CBalanBianca NicoletaÎncă nu există evaluări
- Ipoteze Ale Modelului de RegresieDocument10 paginiIpoteze Ale Modelului de RegresieMaria C.Încă nu există evaluări
- 3 Aplicatii Testarea Stationaritatii SerieiDocument7 pagini3 Aplicatii Testarea Stationaritatii SerieiAlexandra GavrilÎncă nu există evaluări
- Curs 4 EconometrieDocument33 paginiCurs 4 Econometrieandreeamada119006Încă nu există evaluări
- Ecnm BrosuriDocument25 paginiEcnm BrosuriDelia Ungureanu100% (1)
- Problema 5 Heteroscedasticitate (2017-2018)Document38 paginiProblema 5 Heteroscedasticitate (2017-2018)BusuiocMariaÎncă nu există evaluări
- AT4.1 Verificare IpotezeDocument6 paginiAT4.1 Verificare Ipotezeadina nonameÎncă nu există evaluări
- Verificarea Ipotezelor Modelului de Regresiei - Suport de CursDocument19 paginiVerificarea Ipotezelor Modelului de Regresiei - Suport de CursDaniela TalmaciuÎncă nu există evaluări
- Ipoteza de NormalitateDocument3 paginiIpoteza de NormalitateGutu AngelaÎncă nu există evaluări
- Curs3 Econometrie Regresia Lin SimplaII PDFDocument34 paginiCurs3 Econometrie Regresia Lin SimplaII PDFLoRe LtkÎncă nu există evaluări
- Model Regresie LiniaraDocument25 paginiModel Regresie LiniaraAna SimonaÎncă nu există evaluări
- Econometrie - AutocorelareDocument28 paginiEconometrie - AutocorelareMarius AdrianÎncă nu există evaluări
- Ipoteze Clasice - Model de RegresieDocument29 paginiIpoteze Clasice - Model de RegresieLeta NicoÎncă nu există evaluări
- Rezolvare Subiect 2 - Model Examen 2020Document6 paginiRezolvare Subiect 2 - Model Examen 2020didddyshÎncă nu există evaluări
- Ipoteze Ale Modelului de Regresie Exemple de Intrebari GrilaDocument12 paginiIpoteze Ale Modelului de Regresie Exemple de Intrebari GrilaUrsu AlexandraÎncă nu există evaluări
- 5 - 6 Curs Econometrie RLMDocument50 pagini5 - 6 Curs Econometrie RLMLucian DeleuÎncă nu există evaluări
- Probleme RezolvateDocument62 paginiProbleme Rezolvatekananmatsuura42Încă nu există evaluări
- Curs4 Econometrie Regresia Lin Simpla (II)Document37 paginiCurs4 Econometrie Regresia Lin Simpla (II)Badale Morohoschi Ana MariaÎncă nu există evaluări
- Remedial Econometrie FINAL-2Document38 paginiRemedial Econometrie FINAL-2Cristi Mitrea0% (4)
- Teste Teoretice Metode Numerice 2011-2012Document5 paginiTeste Teoretice Metode Numerice 2011-2012Ionuţ DiniaşÎncă nu există evaluări
- Ipoteze ModelDocument31 paginiIpoteze ModelCristi MitreaÎncă nu există evaluări
- Seminarii EconometrieDocument35 paginiSeminarii EconometrieAnghelache Eduard CristianÎncă nu există evaluări
- Econometrie - Tipuri de Întrebări Grilă Examen 2022 - FinalDocument7 paginiEconometrie - Tipuri de Întrebări Grilă Examen 2022 - FinalElena RomanciucÎncă nu există evaluări
- EconometriDocument26 paginiEconometriMihaela IzmanÎncă nu există evaluări
- 4 - Cap4 - Metode de Rezolvare A Circuitelor ElectriceDocument22 pagini4 - Cap4 - Metode de Rezolvare A Circuitelor ElectricePeTru Mocan100% (11)
- Curs3 ADocument18 paginiCurs3 AbrincadianaÎncă nu există evaluări
- Autocorelarea ErorilorDocument17 paginiAutocorelarea ErorilorAlina SociuÎncă nu există evaluări
- SeriiDeTimp PDFDocument36 paginiSeriiDeTimp PDFRaluca LupuÎncă nu există evaluări
- Etape EViewsDocument30 paginiEtape EViewski_tsuketeÎncă nu există evaluări
- Specificare Şi Identificare. Ipotezele MCCMPDocument23 paginiSpecificare Şi Identificare. Ipotezele MCCMPMihalcioiu AndreiÎncă nu există evaluări
- Curs Statistica ASEDocument13 paginiCurs Statistica ASEciprian24Încă nu există evaluări
- RezolvariDocument11 paginiRezolvariMihaela IzmanÎncă nu există evaluări
- Lab 3 AlexDocument14 paginiLab 3 AlexAnonymous h87K4sTÎncă nu există evaluări
- Curs Regresie Liniara Simpla - 1Document24 paginiCurs Regresie Liniara Simpla - 1Tiberiu StavarusÎncă nu există evaluări
- Elis Jaba - C8 - Analiza de Regresie SimplaDocument8 paginiElis Jaba - C8 - Analiza de Regresie SimplaLeontina MateiÎncă nu există evaluări
- E1 Masurarea Rezistentei Prin PunteDocument4 paginiE1 Masurarea Rezistentei Prin PunteIonut DumitruÎncă nu există evaluări
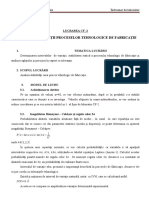
- Platforma Laborator CF - Analiza Stabilitatii Proceselor Tehnologice de FabricatieDocument15 paginiPlatforma Laborator CF - Analiza Stabilitatii Proceselor Tehnologice de FabricatieSilviu Georgian StanciucuÎncă nu există evaluări
- Seminar9 Heteroscedasticitate (27.11.2017)Document7 paginiSeminar9 Heteroscedasticitate (27.11.2017)Lila Yaman100% (1)
- Curs 5 - 03.11.2020Document5 paginiCurs 5 - 03.11.2020alina.kovacs00Încă nu există evaluări
- Regresie Liniara (2) : Luni, 6 Martie 2023Document29 paginiRegresie Liniara (2) : Luni, 6 Martie 2023Cristina IonascÎncă nu există evaluări
- Anaiza Previziune Box Jenkins MASTYERDocument16 paginiAnaiza Previziune Box Jenkins MASTYERVictoria FetescuÎncă nu există evaluări
- Recapitulare ExamenDocument33 paginiRecapitulare ExamenIoana Elena Ciubotariu100% (1)
- 20.danciu Valentin - Rus TiberiuDocument6 pagini20.danciu Valentin - Rus TiberiuCorina Mihaela IvanovÎncă nu există evaluări
- Forma DistributieiDocument5 paginiForma DistributieiniculaicaÎncă nu există evaluări
- Tema 11 Regresie Si Corelatie Note de CursDocument8 paginiTema 11 Regresie Si Corelatie Note de CursDabija ConsuelaÎncă nu există evaluări
- Chestionar Cu Prima Pagina FinalDocument23 paginiChestionar Cu Prima Pagina FinalAna - Maria AvramÎncă nu există evaluări
- Probleme k2Document3 paginiProbleme k2Ana - Maria AvramÎncă nu există evaluări
- Cursul 09 - Segmentarea Pietei Si Pozitionarea Pe PiataDocument10 paginiCursul 09 - Segmentarea Pietei Si Pozitionarea Pe PiataAna - Maria AvramÎncă nu există evaluări
- ISA ID Complet 2011 Tiparit Extras A42017Document57 paginiISA ID Complet 2011 Tiparit Extras A42017Ana - Maria AvramÎncă nu există evaluări
- Memorandumul Din 1892Document6 paginiMemorandumul Din 1892Ana - Maria AvramÎncă nu există evaluări
- Mihai Viteazul Si Lupta AntiotomanaDocument9 paginiMihai Viteazul Si Lupta AntiotomanaAna - Maria AvramÎncă nu există evaluări
- Calatori Straini Despre Tarile Romane Vol 1Document662 paginiCalatori Straini Despre Tarile Romane Vol 1enacherenato93% (29)