Documente Academic
Documente Profesional
Documente Cultură
Unitatea de Invatare 8
Încărcat de
blackspyder_17Drepturi de autor
Formate disponibile
Partajați acest document
Partajați sau inserați document
Vi se pare util acest document?
Este necorespunzător acest conținut?
Raportați acest documentDrepturi de autor:
Formate disponibile
Unitatea de Invatare 8
Încărcat de
blackspyder_17Drepturi de autor:
Formate disponibile
Proiectarea sistemelor automate liniare i continue
Unitatea de nvare nr. 8
PROIECTAREA SISTEMELOR AUTOMATE LINIARE I CONTINUE
Cuprins Obiectivele unitii de nvare nr. 8 8.1 8.2 8.2.1 8.2.1.1 8.2.1.2 8.2.1.3 8.2.1.4 8.2.1.5 8.2.1.6 8.2.1.7 8.2.1.8 8.2.2 8.2.2.1 8.2.2.2 8.2.2.3 8.2.2.4 8.2.2.5 8.2.2.6 8.2.2.7 Generaliti Proiectarea SALC prin metoda alocrii polilor i zerourilor funciei de transfer Sistemul de ordinul II (cu doi poli) Funcia de transfer Rspunsul la intrare treapt Suprareglajul Durata regimului tranzitoriu Lrgimea de band Gradul de amortizare Factorul total de amplificare Concluzii Sistemul cu doi poli i un zero Funcia de transfer Rspunsul la intrare treapt unitar Suprareglajul Durata regimului tranzitoriu Lrgimea de band Gradul de amortizare Factorul total de amplificare Pagina 89 89 90 90 90 91 92 93 94 95 95 95 96 96 97 98 98 99 100 100 101 101 102 102 102 102
8.2.3 Sistemul cu trei poli Teste de autoevaluare 8 Lucrare de verificare la Unitatea de nvare nr. 8 Rspunsuri la ntrebrile din testele de autoevaluare 8 Concluzii Bibliografie unitatea de nvare nr. 8
88 27 sistemelor i reglaj automat Curs i aplicaii Teoria
Proiectarea sistemelor automate liniare i continue
OBIECTIVELE unitii de nvare nr. 8
Principalele obiective ale Unitii de nvare nr. 8 sunt: nsuirea etapelor metodei de proiectare poli-zerouri; Pentru sistemul cu doi poli, cunoaterea influenei parametrilor i n asupra performanelor sistemului; Cunoaterea influenei introducerii unui zero asupra performanelor sistemului cu doi poli i un zero rezultat.
8.1 Generaliti
Proiectarea unui sistem automat liniar i continu pornete de la un ansamblu de date iniiale care pot fi mprite n dou categorii: 1. Date iniiale referitoare la instalaia tehnologic: Datele trebuie s nu se refere numai la instalaia tehnologic, ci i la caracteristicile elementului de execuie i ale traductorului de reacie, ntruct alegerea acestora este strns legat i condiionat de aspectele constructive de cuplare cu instalaia tehnologic, de tipul i gama de variaie a mrimii de ieire. Partea fixat, adic ansamblul format din: instalaie tehnologic, element de execuie i traductor de reacie, trebuie caracterizat att n raport cu semnalele de comand, ct i n raport cu mrimile perturbatoare. 2. Datele iniiale referitoare la performanele impuse: Sistemul automat trebuie s fie stabil. Pentru performanele impuse, trebuie s se specifice tipul de semnal exterior i punctul de aplicare (semnal de intrare i/sau mrime perturbatoare). Trebuie respectat condiia de realizabilitate fizic (pentru H(s), numrul de zerouri trebuie s fie mai mic dect numrul de poli) ce rezult din principiul cauzalitii (la ieirea unui sistem real efectul modificrii unei mrimi se simte cu o anumit ntrziere). n ceea ce privete obiectivele de proiectare, se urmrete obinerea unui sistem automat care s satisfac cerinele impuse. Astfel, pornind de la modelul matematic al prii fixate ori de la performanele impuse, se determin echipamentele necesare obinerii sistemului automat, adic echipamentele ce constitue regulatorul automat. Asigurarea performanelor impuse poate fi considerat o proiectare minimal. O proiectare optim presupune ca, dintre toate soluiile unei proiectri minimale, s se selecteze aceea soluie care asigur extremul unui criteriu.
89 Teoria sistemelor i reglaj automat Curs i aplicaii
Proiectarea sistemelor automate liniare i continue
8.2
Proiectarea SALC prin metoda alocrii polilor i zerourilor funciei de transfer
n acest caz, pentru H0(s), funcia de transfer a sistemului nchis, se determin o anumit repartiie a polilor i zerourilor astfel nct s fie asigurate performanele impuse. Cunoscnd H0(s), se determin H(s), funcia de transfer a sistemului deschis, din care, cunoscnd HF(s), funcia de transfer a prii fixate, se determin funcia de transfer a regulatorului automat, adic HRA(s). Proiectarea sistemelor automate prin metoda polilor i zerourilor ncepe, de regul, cu amplasarea polilor dominani, respectiv a unei perechi de poli compleci conjugai care determin performanele sistemului automat, urmnd ca, n cazul n care anumite performane impuse nu sunt asigurate, s fie introdui poli i zerouri suplimentari.
8.2.1 Sistemul de ordinul II (cu doi poli)
Observaie: n cele ce urmeaz, cnd se va face referire la sistemul de ordinul II se va pune, ntre paranteze rotunde, indicele 2.
8.2.1.1 Funcia de transfer
Plecnd de la amplasarea polilor dominani, respectiv a unei perechi de poli compleci conjugai, n cazul sistemului de ordinul II, pentru funcia de transfer, se obine expresia: Y (s ) C H0 (2 ) (s ) = = (8.1) I (s ) (s + p1 ) (s + p2 ) Unde p1 i p2 sunt polii alocai, iar C este o constant. Considernd c funcia de transfer a unui sistem deschis are expresia (2.43), adic
H (s ) =
unde P (0 ) = Q (0 ) = 1, dup cum s-a artat n cadrul seciunii 6.1.1, pentru intrare treapt unitar, se obine o eroare staionar nul dac = 1 sau = 2 . Cum
H 0 (s ) = k Q(s ) H (s ) = 1 + H (s ) s P (s ) + k Q(s )
k Q (s ) , s P (s )
(8.2)
(8.3)
Pentru = 1 sau = 2 , se obine
H 0 (s ) = 1.
(8.4)
Rezult c n cazul unui sistem nchis, dac este ndeplinit condiia (8.4), pentru intrare treapt unitar, se obine o eroare staionar nul, adic st = 0 . (8.5) Pentru sistemul de ordinul II, din condiia (8.4) se obine C=p1p2 i rezult:
90 27 sistemelor i reglaj automat Curs i aplicaii Teoria
Proiectarea sistemelor automate liniare i continue
p1p2 p1p2 n H0 (2 ) (s ) = = 2 = 2 (s + p1 ) (s + p2 ) s + (p1 + p2 )s + p1p2 s + 2ns + n 2
(8.6)
unde:
2 p1 p2 = n
p1 + p2 = 2 n
(8.7)
Dac 0 < < 1 , din sistemul (8.7), se obin polii:
p1 = n + j n 1 2 p 2 = n j n 1
2
(8.8)
de unde rezult:
p1 = p2 = n .
(8.9) (8.10)
(8.11) (8.12)
Cum 0 < < 1 , se introduce notaia:
= cos
i se pot deduce relaiile:
1 2 = sin
1 2
= tg .
8.2.1.2 Rspunsul la intrare treapt
Dac la intrare se aplic un semnal treapt unitar, adic i(t)=1, pentru t 0 , i se noteaz cu y(2)(t) rspunsul sistemul de ordinul II, se obine:
Y(2 ) (s ) = H 0 (2 ) (s ) I (s ) = H 0 (2 ) (s )
=
2 n 1 = 2 = 2 s s + 2 n s + n s
n 1 2 s + n 1 + 2 2 2 s (s + )2 + 1 2 2 2 1 (s + n ) + n 1 n n Aplicnd transformata Laplace invers, rezult: cos t y (2 ) (t ) = 1 e t cos n 1 2 t + e sin n 1 2 t sin
(8.13)
adic
y (2 ) (t ) = 1 e n t
sin n 1 2 t + .
(8.14)
Evident, din relaia (8.14), rezult valorile: y st (2 ) = 1 , st (2 ) = 0 , deci condiia (8.5) este
ndeplinit.
91 Teoria sistemelor i reglaj automat Curs i aplicaii
Proiectarea sistemelor automate liniare i continue
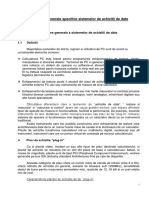
8.2.1.3 Suprareglajul
Cum valoarea suprareglajului este dat de primul maxim (fig. 8.1), se determin valorile timpului la care se ating valorile de extrem. Acestea se obin rezolvnd ecuaia: dy (2 ) (t ) =0 (8.15) dt i sunt date de relaia: k (8.16) t mk (2 ) = n 1 2
unde
k = 0, 1, 2,... .
Rezult:
1(2 ) = y (2 ) (t m1(2 ) ) y st (2 ) = 1
n t m 1( 2 )
sin n 1 2 t m1(2 ) + 1 =
1 2
1 2
1 2
sin ( + ) =
1 2
1 2
sin ( ) = e
(8.17)
y(2)(t) ymax(2)
1(2 ) = (2 )
2 (2 )
t tm0(2) tm1(2) tm2(2) tm3(2)
Fig. 8.1. Reprezentarea suprareglajului.
n concluzie, pentru sistemul de ordinul II, suprareglajul este:
( 2 ) =e 0,85 , suprareglajul este practic nul.
1 2
(8.18)
Pentru diverse valori ale lui , valorile suprareglajului sunt date n tabelul 8.1. Pentru
92 27 sistemelor i reglaj automat Curs i aplicaii Teoria
Proiectarea sistemelor automate liniare i continue
0,5 0,6 0,7 0,8
(2 ) [%]
(2 )
1 0,5
16 % 10 % 4,3 % 2%
0,5
Tabelul 8.1. Valori ale suprareglajului
Fig. 8.2. Variaia suprareglajului
De reinut!
1. Suprareglajul depinde numai de i nu depinde de n . 2. Suprareglajul scade cnd crete (fig. 8.2).
8.2.1.4 Durata regimului tranzitoriu
Pentru determinarea duratei regimului tranzitoriu tt, se pleac de la condiia (5.2) care, n cazul sistemului de ordinul II, devine:
y (2 ) (t ) - 1 < e n t 1
2
(8.19)
innd cont de relaia (4.14), condiia (4.17) devine:
sin n 1 2 t + <
(8.20)
Pentru relaia (8.20), o relaie acoperitoare este
e din care rezult: t t (2 ) =
n t t ( 2 )
1 2
(8.21)
ln 1 2 n
(8.22)
Dac se consider =0,05, pentru diverse valori ale lui , n tabelul 8.2, sunt date relaii ale duratei regimului tranzitoriu funcie de n .
93 Teoria sistemelor i reglaj automat Curs i aplicaii
Proiectarea sistemelor automate liniare i continue
0,5 6,28
0,6
5,35
0,7 4,78
0,8 4,37
t t (2 )
Tabelul 8.2. Relaii ale duratei regimului tranzitoriu.
Din aceste relaii, se constat c se poate considera pentru durata regimului tranzitoriu, relai acoperitoare: 4 t t (2 ) = (8.23)
Dac o condiie de forma
t t (2 ) t 2 imp este ndeplinit de durata regimului tranzitoriu ce
rezult din relaia (8.23), cu att mai mult aceast condiie va fi ndeplinit de durata regimului tranzitoriu ce rezult din relaia (8.20).
8.2.1.5 Lrgimea de band
Pentru s = j , din relaia (8.6), se obine:
H 0 (2 ) ( j ) =
2 n
2 2
2 n
+ 4
2 2 n
(8.24)
2
Pentru calculul lrgimii de band (vezi seciunea 5.2.4), se calculeaz pulsaia B (2 ) , ce rezult din condiia:
H 0 (2 ) ( j B (2 ) ) =
adic
2 2
= 2 2
(8.25)
(
de unde rezult pulsaia de band:
2 n
2 B (2 )
2 n 2 2 2 + 4 2 n B (2 )
(8.26)
Prelucrnd ecuaia (8.26), se obine ecuaia: 2 4 4 B (2 ) 2 1 2 2 n 2 B (2 ) n =0
(8.27) (8.28)
B (2 ) = n 1 2 2 + 2 4 2 + 4 2
Se observ c lrgimea de band depinde de i n. Din relaia (8.28), pentru = 0,5 , se obine
B (2 ) 1,27 n
iar pentru = 0,7 rezult
(8.29) (8.30)
B (2 ) n .
94 27 sistemelor i reglaj automat Curs i aplicaii Teoria
Proiectarea sistemelor automate liniare i continue
8.2.1.6 Gradul de amortizare
Conform relaiei (8.16), al doilea maxim al rspunsului sistemului de ordinul II are loc la momentul 3 t m 3 (2 ) = (8.31) n 1 2
Rezult
2(2 ) = y (2 ) (t m 3 (2 ) ) 1 = e
3 1 2
(8.32)
Cu relaia (5.6) i valorile date de relaiile (8.17) i (8.32), se obine gradul de amortizare
(2 )
2 (2 ) = =e 1(2 )
2 1 2
(8.33)
8.2.1.7 Factorul total de amplificare
Cum funcia de transfer n circuit deschis este:
(8.34) 1 s 2 s + 1 n prin identificare (relaia (8.2), pentru = 1), din relaa (8.34), se obine factorul total de amplificare 1 H 0 (2 ) (s ) s (s + 2 n ) k1(2 ) = H (2 ) (s ) = H 0 (2 ) (s ) =
2 n
n 2
n 2
(8.35)
Rezult c, pentru intrare ramp unitar, eroarea staionar este
st (2 ) =
1 k 1(2 )
(8.36)
8.2.1.8 Concluzii
n cursul proiectrii, performanele trebuie s verifice condiiile impuse prin datele de proiectare, ceea ce presupune determinarea valorilor pentru i n , care s satisfac urmtorul sistem de inecuaii:
95 Teoria sistemelor i reglaj automat Curs i aplicaii
Proiectarea sistemelor automate liniare i continue
( 2 ) =e
t t (2 ) =
1 2
impus
t t impus
B (2 ) = n 1 2 2 + 2 4 2 + 4 2 B impus (2 ) = e
(8.37)
2 1 2
impus
st (2 ) =
st impus
Dac sistemul de inecuaii (8.37) nu are soluie, rezult c, pentru i n , nu exist valori care s satisfac toate performane impuse. Aceasta conduce la necesitatea de a continua proiectarea prin introducerea de zerouri sau de poli.
8.2.2 Sistemul cu doi poli i un zero
Observaie: n cele ce urmeaz, cnd se va face referire la sistemul cu doi poli i un zero, se va pune, ntre paranteze rotunde, indicele 3.
8.2.2.1 Funcia de transfer
Introducerea unui zero, notat cu z, conduce la funcia de transfer: Y (s ) C (s + z ) H 0 (3 ) (s ) = = I (s ) (s + p1 ) (s + p2 ) Plecnd de la ndeplinirea condiiei (8.4), se obine C =
2 n 2 p1 p2 n = . Rezult: z z
(8.38)
(s + z ) s s z H 0 (3 ) (s ) = 2 = 1 + H 0(2 ) (s ) = H 0 (2 ) (s ) + H 0 (2 ) (s ) (8.39) 2 z s + 2 n s + n z Pentru intrare treapt unitar 1 1 1 1 Y(3 ) (s ) = H 0 (3 ) (s ) = H 0 (2 ) (s ) + H 0 (2 ) (s ) = Y(2 ) (s ) + s Y(2 ) (s ) (8.40) s s z z de unde rezult: 1 dy (2 ) (t ) y (3 ) (t ) = y (2 ) (t ) + (8.41) z dt & (2 ) (t ) > 0 , rezult y (3 ) (t ) > y (2 ) (t ) , iar cnd Observaie: Cnd y (2 ) (t ) crete, deoarece y
y (2 ) (t ) scade, y (3 ) (t ) < y (2 ) (t ) .
96 27 sistemelor i reglaj automat Curs i aplicaii Teoria
Proiectarea sistemelor automate liniare i continue
8.2.2.2 Rspunsul la intrare treapt unitar
Din relaiile (8.41) i (8.14), rezult: 1 dy (2 ) (t ) e n t y (3 ) (t ) = y (2 ) (t ) + = 1 sin n 1 2 t + 2 z dt 1
1 n e n t sin n 1 2 t + + 1 2 cos n 1 2 t + = 2 z 1 e nt 1
2
)]
= 1 = 1 e nt 1
2
sin n 1 t + +
2
n e t
n
sin n 1 2 t + =
[sin (
1 2 t + cos n 1 2 t 1 2 +
n e t
n
sin n 1 2 t =
e n t = 1 n sin n 1 2 t + 1 2 cos n 1 2 t z 1 2 Se introduce notaia:
=
i rezult y (3 ) (t ) = 1
e n t
2
n
z
(8.42)
e n t 1
2
[( )sin (
1 2 t + 1 2 cos n 1 2 t =
)]
1 2 2 = 1 2 + 1 sin n 1 t + cos n 1 2 t 2 1 2 2 2 + 1 2 + 1 iar dac se fac notaiile: = cos (8.43) 2 2 + 1
1 2
2 2 + 1
unde
= sin
(8.44)
1 2 = arctg
(8.45)
se obine
y (3 ) (t ) = 1 e n t 1
2
2 2 + 1 sin n 1 2 t + .
(8.46)
Din relaia (8.46), rezult valorile: y st (3 ) = 1 , st (3 ) = 0 .
97 Teoria sistemelor i reglaj automat Curs i aplicaii
Proiectarea sistemelor automate liniare i continue
8.2.2.3 Suprareglajul
Plecnd de la ecuaia: dy (3 ) (t ) dt se obine ecuaia de unde rezult ecuaia din care se obin momentele de extrem
t mk (3 ) =
=0
(8.47)
n sin n 1 2t + = n 1 2 cos n 1 2t +
tg n 1 2t + = tg k ( )
,
n 1 2
(8.48)
unde
k = 0, 1, 2, K .
Suprareglajul rezult:
(3 ) = 1(3 ) = y (3 ) (t m1(3 ) ) y st (3 ) = 1
n t m 1( 3 )
2 2 + 1 sin n 1 2 t m1(3 ) + 1 =
( )
1 2 2
( )
1 2 2
2 + 1 sin ( ( ) + ) =
2
2 2 + 1 sin ( )
(8.49)
Din relaiile (8.11) i (8.49), rezult:
( )
1 2
(3 ) = 2 + 1 e
2
(8.50)
Se observ c, pentru sistemul cu doi poli i un zero, suprareglajul depinde de , ,
, i , deci de n , z i . Se constat c: Pentru = 0 , adic z , rezult (3 ) = (2 ) ; Pentru 0 < 2 , (3 ) crete, dac crete.
n concluzie, prin introducerea zeroului, suprareglajul crete (efect negativ).
8.2.2.4 Durata regimului tranzitoriu
Pleacnd de la condiia se obine: e nt 1
2
y (3 ) (t ) - 1 <
(8.51)
2 2 + 1 sin n 1 2 t + <
(8.52)
Pentru relaia (8.52), o relaie acoperitoare este
98 27 sistemelor i reglaj automat Curs i aplicaii Teoria
Proiectarea sistemelor automate liniare i continue
e nt 1 din care rezult: ln t t (3 ) =
2
2 2 + 1 =
(8.53)
1 2
2 2 + 1 ln 1 2 ln 2 2 + 1 = n n
1 ln 2 2 + 1
(8.54)
Din relaiile (8.22) i (8.54), se obine:
t t (3 ) = t t (2 ) +
(8.55)
Dac 0 2 , cum 0 2 2 + 1 < 1, rezult:
t t (3 ) < t t (2 )
(8.56)
n concluzie, introducerea zeroului accelereaz desfurarea regimului tranzitoriu (efect pozitiv).
8.2.2.5 Lrgimea de band
Din relaia (8.39), se obine:
H 0 (2 ) ( j ) H 0 (2 ) ( j ) z2 rezult c introducerea zeroului mrete lrgimea de band (fig. 8.3) , adic: B (3 ) B ( 2 )
H 0 (3 ) ( j ) = 1 +
(8.57) (8.58)
Mrindu-se lrgimea de band, sistemul devine mai sensibil la aciunea mrimilor perturbatoare (efect negativ).
H 0 (3 ) ( j )
H 0 (2 ) ( j ) H 0 (2 ) ( j ) H 0 (3 ) ( j )
0,707
B ( 2 ) B (3 )
Fig. 8.3. Modificarea lrgimii de band. Pentru valorile uzuale , se obine: 2 B (2 ) B (3 ) B (2 ) . Teoria sistemelor i reglaj automat Curs i aplicaii
(8.59) 99
Proiectarea sistemelor automate liniare i continue
8.2.2.6 Gradul de amortizare
Conform relaiei (8.48), al doilea maxim al rspunsului sistemului cu doi poli i un zero are loc la momentul 3 ( ) t m 3 (3 ) = , (8.60) n 1 2 Rezult
2(3 ) = y (3 ) (t m 3 (3 ) ) 1 = 2 + 1 e
2 2 (3 ) = =e 1(3 ) 2 1 2
3 ( ) 1 2
(8.61)
Cu valorile date de relaiile (8.50) i (8.61), se obine gradul de amortizare
(3 )
= (2 ) .
(8.62)
Se constat c, prin introducerea zeroului, gradul de amortizare nu s-a modificat. Pstrarea gradului de amortizare, n condiiile creterii suprareglajului, se datorete faptului c gradul de amortizare este definit de polii funciei de transfer, n timp ce suprareglajul este determinat att de poli ct i de zerouri.
8.2.2.7 Factorul total de amplificare
Cum funcia de transfer n circuit deschis este:
s + 1 2 s z n + 1 2 n H 0 (3 ) (s ) z z = = H (3 ) (s ) = s 1 H 0 (3 ) (s ) 2 s 2 + 2 n s n z 1 1 + s s 2 n 2 n z prin identificare (relaia (4.2)), din relaa (4.62), se obine factorul total de amplificare
2 n 2 n
(8.63)
k 1(3 ) =
n 2
n 2 n = k1(2 ) 2
(8.64)
Deoarece k1(3 ) > 0 , trebuie ndeplinit condiia 2 > i rezult
k 1(3 ) = 1
1 2
>
(8.65)
Se constat c, introducerea zeroului micoreaz eroarea staionar, la semnal ramp, ntruct:
st (3 ) =
1 k 1(3 )
<
1 k 1(2 )
= st (2 )
(8.66)
100 27 sistemelor i reglaj automat Curs i aplicaii Teoria
Proiectarea sistemelor automate liniare i continue
8.2.3 Sistemul cu trei poli
Dac n configuraia iniial cu doi poli dominani, se introduce un pol suplimentar p3, suprareglajul poate s creasc sau s scad n funcie de poziiile polilor compleci conjugai i a polului suplimentar. n caz general, cu o configuraie iniial cu mai muli poli i eventuale zerouri, introducerea unui pol suplimentar, de regul, mrete suprareglajul, deoarece introduce o ntrziere suplimentar n transmiterea semnalelor, de la intrarea la ieirea sistemului, ceea ce creeaz condiii de a se reduce rezerva de stabilitate, efect ce conduce la creterea amplitudinii oscilaiilor din cadrul regimului tranzitoriu, deci durata regimului tranzitoriu crete. Prin introducerea unui pol suplimentar, se micoreaz i factorul total de amplificare, deci crete eroarea staionar pentru intrare ramp, dar se micoreaz lrgimea de band, datorit apariiei unui punct de frngere, a caracteristicii logaritmice amplitudine-pulsaie, determinat de polul suplimentar. Singurul efect pozitiv este deci micorarea lrgimii de band deci micorarea sensibilitii sistemului automat la aciunea perturbaiilor de frecven ridicat. Practic, prin introducerea unui pol suplimentar se introduce un element de ntrziere de ordinul I care realizeaz o aciune de filtrare.
Teste de autoevaluare 8
8.1. n cazul sistemului cu doi poli, supreglajul i gradul de amortizare, depind: a) de i n ; b) de n ; c) numai de . 8.2. n cazul sistemului cu doi poli, supreglajul: a) crete cnd crete; b) scade cnd crete; a) crete cnd n crete. 8.3. n cazul sistemului cu doi poli i un zero, comparativ cu sistemul cu doi poli, prin introducerea zeroului, supreglajul: a) s-a mrit; b) s-a micorat; a) num s-a modificat. 8.4. n cazul sistemului cu doi poli i un zero, comparativ cu sistemul cu doi poli, prin introducerea zeroului, lrgimea de band: a) s-a mrit; b) s-a micorat; a) num s-a modificat. 101 Teoria sistemelor i reglaj automat Curs i aplicaii
Proiectarea sistemelor automate liniare i continue
Lucrare de verificare la Unitatea de nvare nr. 8
S se calculeze performanele sistemului nchis, dac acesta are reacie unitar iar pe calea direct are funcia de transfer: k H (s ) = s (1 + 0,1s )
Rspunsuri la testele de autoevaluare 8
6.1. Rspuns corect c) ; 6.2. Rspuns corect b) ; 6.3. Rspuns corect a) ; 6.4. Rspuns corect a) ;
Concluzii
1. Cu metoda poli-zerouri, performanele unui sistem cu doi poli sau unui sistem cu doi poli i un zero pot fi determinate cu precizie. 2. Dac, n urma aplicrii metodei poli-zerouri, se ajunge la un sistem cu doi poli i un zero care nu satisface performanele impuse, continuarea aplicrii metodei este din ce n ce mai dificil.
Bibliografie
I. Dumitrache, S Clin, C Boan, C Nitu, Automatizri i echipamente electronice, Editura Didactic i Pedagogic, Bucureti,1982. V. A. Besekerski etc., Teoria reglrii automate, Editura Tehnic, Bucureti,1964.
102 27 sistemelor i reglaj automat Curs i aplicaii Teoria
S-ar putea să vă placă și
- Curs SADDDocument190 paginiCurs SADDblackspyder_17Încă nu există evaluări
- Reductor Cu Dinti Inclinati Cu o TreaptaDocument103 paginiReductor Cu Dinti Inclinati Cu o TreaptaRebeca Paula100% (1)
- Termoenergetica PetrochimicaDocument262 paginiTermoenergetica PetrochimicaCHIS TIMUR VASILEÎncă nu există evaluări
- P 42Document5 paginiP 42Cic AlexÎncă nu există evaluări
- Bilantul Energetic Al Motoarelor NavaleDocument4 paginiBilantul Energetic Al Motoarelor Navaleblackspyder_17Încă nu există evaluări
- Parametrii Caracteristici de Functionare A Motoarelor NavaleDocument7 paginiParametrii Caracteristici de Functionare A Motoarelor Navaleblackspyder_17Încă nu există evaluări