Documente Academic
Documente Profesional
Documente Cultură
Cap 2
Încărcat de
Iuga VasileTitlu original
Drepturi de autor
Formate disponibile
Partajați acest document
Partajați sau inserați document
Vi se pare util acest document?
Este necorespunzător acest conținut?
Raportați acest documentDrepturi de autor:
Formate disponibile
Cap 2
Încărcat de
Iuga VasileDrepturi de autor:
Formate disponibile
CAPITOLUL 2
PROBLEME CLASICE ALE AEROELASTICITII I
ANALIZA CUPLAJULUI FLUID-STRUCTUR
2.1. INTRODUCERE
Prezentul capitol are un dublu obiectiv. n primul rnd, urmrim
familiarizarea cititorului cu formularea unor probleme clasice ale aeroelasticitii,
aa cum este cea de flutter. n al doilea rnd, vom expune succint modalitile de
cuplaj numeric al problemelor structural i aerodinamic. Vom presupune n cele
ce urmeaz c modelul structural este formulat matricial. Exemplul considerat
pentru prezentarea unor detalii este cel al seciunii tipice, liniar i cu dou grade de
libertate. Caracteristicile ineriale, elastice i de amortizare sunt constante, deci
independente de timp sau / i gradele de libertate. Acest model este dedus pe baza
formalismului ecuaiilor Lagrange. n ciuda simplitii sale, modelul structural este
suficient pentru a ne permite expunerea principalelor aspecte legate de rezolvarea
numeric a problemelor de tip rspuns dinamic al structurii (PS). Vom Pentru
calculul forelor aerodinamice vom face referire la dou categorii de metode. n
problemele de aeroelasticitate clasic, folosim de regul modele liniare. Avnd n
vedere scopul acestei cri, vom face referire n primul rnd la modelul
Theodorsen, cu diversele sale posibiliti de utilizare. Pentru a analiza cuplajul
fluid-structur, vom presupune c forele aerodinamice se calculeaz numeric,
folosind ca model matematic sistemul ecuaiilor Euler, pentru regimuri de curgere
compresibile i incompresibile. Vom numi problema calculului numeric al forelor
aerodinamice problema CFD (de la denumirea deja consacrat Computational
Fluid Dynamics).
2.2. MODELUL STRUCTURAL
2.2.1 Formularea general PS
Deduse folosind formalismul ecuaiilor Lagrange, ecuaiile de
micare ale unei structuri elastice sunt date de:
0
+ + = + Mq Cq Kq Q Q (2.1)
unde am notat cu M, C, K matricele maselor, amortizrilor i rigiditilor
generalizate iar cu q i Q vectorii coordonatelor i forelor generalizate. Indicele
0 ataat vectorului forelor indic independena acestora de coordonatele
generalizate i derivatele acestora. Matricele sunt constante n timp i independente
de coordonatele generalizate i deci componenta structural a modelului aeroelastic
este liniar. Deduse direct din ecuaiile Lagrange, aceste matrice sunt pline sau
7
rare i mai ales ne-diagonale, indicnd astfel cuplaje structurale ntre
coordonatele generalizate. Este cunoscut faptul c, printr-o schimbare raional de
variabile, modelul structural poate fi adus la o form mult mai convenabil din
punct de vedere computaional. Dac se consider problema vibraiilor libere ale
sistemului elasto-dinamic cu n grade de libertate:
+ = Mq Kq 0 (2.2)
atunci pulsaiile i vectorii proprii la dreapta sunt ( ) ( ) ( )
1 1 2 2
, , , ,... ,
n n
q q q .
Dac n urma unui proces raional de ortonormare i de selecie se rein numai r
vectori proprii liniar independeni ( ) r n < , atunci acetia formeaz o baz care este
reprezentat de matricea | |
1 2
, ,..,
r
q q q = R . De obicei, se rein numai primii r
vectori proprii, considerai n ordinea cresctoare a frecvenelor proprii. Se arat
uor c prin introducerea coordonatelor naturale cu transformarea
= q R (2.3)
se ajunge la sistemul de ecuaii:
0
+ + = + M C K Q Q
(2.4)
n care matricele din stnga semnului egal sunt diagonale i de dimensiune redus,
aa cum rezult din expresiile
T
= = M R MR I
, ( ) 2
i i
diag = C
,
( )
2
i
diag = K
i apoi
T
= Q R Q
i
0 0
T
= Q R Q
. Reprezentarea trunchiat a
coordonatelor generalizate este corect, dac frecvenele proprii corespunztoare
vectorilor proprii neglijai sunt mult mai mari dect frecvenele asociate problemei
curgerii. Este de remarcat faptul c n modelul anterior
i
este amortizarea modal
a modului i i se determin de regul experimental. n cele ce urmeaz, vom
considera c pentru aplicaiile practice ntotdeauna sistemul de ecuaii folosit
pentru analizele de flutter i rspuns dinamic este scris n coordonate naturale.
2.2.2 Cazul seciunii tipice
Un model reprezentativ i extrem de util n aeroelasticitate este cel al
seciunii tipice cu dou grade de libertate, pentru care matricele maselor,
amortizrilor i rigiditilor sunt date de:
0 0
, ,
0 0
h h
m S c k
S J c k
( ( (
= = =
( ( (
M C K (2.5)
iar vectorii din ecuaii sunt:
0
0
0
, ,
P h P
M M
= = =
` ` `
) ) )
q Q Q (2.6)
Matricea de rigiditate este diagonal datorit faptului c punctul de referin pentru
definirea celor dou grade de libertate este centrul elastic al seciunii. Matricea
8
maselor nu este diagonal, fapt care indic existena unui cuplaj inerial ntre cele
dou grade de libertate (cuplaj care este i foarte important din punct de vedere
aeroelastic). Cuplajul dispare dac centrul de greutate al seciunii tipice coincide cu
centrul ei elastic. Evident, aceast situaie absolut particular nu se regsete i n
situaia modelelor cu mai multe grade de libertate, motiv pentru care utilizarea
coordonatelor generalizate naturale se impune. Menionm totui c pentru
seciunea tipic, prin utilizarea coordonatelor naturale nu se reduce dimensiunea
problemei de rezolvat, numrul acestora fiind egal cu cel al coordonatelor
generalizate.
Dac se folosete o adimensionalizare folosind ca lungime de referin
semicoarda seciunii tipice b i timpul adimensional t
= , n care
k J
= este pulsaia micrii decuplate de tangaj, sistemul cu dou grade
de libertate devine, n absena amortizrii structurale:
( )
2
2
2 2 2
2
2
1 0 1
2
0
h
L
M
h
h h
x c
d
b b
x r c d
k
r
(
| |
( (
|
+ =
` ` `
( (
\
)
(
) )
(2.7)
Am notat n cele de mai sus:
2 2
, , ,
h h
x S mb r J mb k m m b
= = = = (2.8)
i am definit frecvena redus / k b V = . Termenul din dreapta include aici toate
forele aerodinamice, dependente i independente de cele dou grade de libertate,
prin coeficienii adimensionali de portan i moment de tangaj (fa de centrul
elastic). Aceti coeficieni sunt evident dependeni implicit de timpul adimensional.
Notnd { }
T
h b = q , definim problema vibraiilor libere cuplate prin:
( )
2
2
2
2
1
0
0
0
h
x
x r
r
| | (
(
+ = |
(
(
|
(
\
q (2.9)
Matricea vectorilor proprii la dreapta este atunci:
| |
1 2
1 2
not
h b h b
(
= =
` ` (
) )
R r r (2.10)
Este cunoscut faptul, deja menionat anterior, c vectorii proprii sunt ortogonali n
raport cu matricele maselor i respectiv rigiditilor. Cum vectori proprii sunt
determinai cu precizia cte unei constante arbitrare, determinm aceste constante
astfel nct vectorii proprii s fie ortonormali n raport cu matricea maselor, adic:
1,2 1,2 1,2 2,1 2 2
1 1
1, 0
T T
x x
x r x r
( (
= =
( (
r r r r
9
Coordonatele naturale menionate anterior sunt date de transformarea = q R i
satisfac sistemul de ecuaii:
( )
2
1
2 2
2
2
1 0 0 1
2 0 1 0
L T
M
h
c
c
k
( (
+ =
` ( (
)
R (2.11)
Pornind de la acest sistem de dou ecuaii difereniale de ordinul al doilea, cuplate
numai prin intermediul dependenei coeficienilor aerodinamici de cele dou
coordonate naturale i derivatele lor, putem introduce amortizarea structural prin
intermediul amortizrilor modale
i
i se obine:
( )
2
1
2 2
2
2 2 2
2 0 1 0 0 1
0 2 2 0 1 0
i i L T
M
h
c
c
k
( ( (
+ + =
` ( ( (
)
R
(2.12)
n concordan cu o notaie anterioar i pentru a compacta scrierea ecuaiilor ce
urmeaz, notm termenii din membrul drept al ecuaiilor cu:
( )
1
2
2
2
1
2
L T
M
h
c Q
c Q k
=
` `
) )
R
(2.13)
2.2.3. Observaii asupra forelor exterioare
n abordrile aeroelastice liniare clasice, forele exterioare generalizate
sunt formal mprite n dou categorii i anume fore dependente i respectiv
independente de deformaiile elastice. Prin urmare, includem n mod uzual n Q
numai acele fore exterioare care depind direct de coordonatele generalizate. De
exemplu, dac ne referim la modelul Theodorsen, liniar, atunci putem scrie:
2 1 0
= + + Q A q A q A q (2.14)
Matricile A
2
, A
1
, A
0
depind de viteza i densitatea aerului, ca i de caracteristicile
aerodinamice ale profilului. Este foarte important de menionat faptul c n
exprimarea anterioar a forelor aerodinamice toi termenii sunt reali. Dac
folosim acest model liniar, atunci n vectorul Q
0
sunt incluse forele aerodinamice
staionare i nestaionare dependente de cauze exterioare deformaiilor elastice, ca
de exemplu rafale, torsiunea geometric a aripii, interferene aerodinamice. De
asemenea, acelai vector include fore generalizate de alt natur, cum sunt efectele
greutii, acceleraiilor provenite din manevre, impact. Abordarea liniar este util
pentru determinarea vitezei critice de flutter cu metodele clasice de tip V-g sau p-k.
Totui, cum n aplicaiile generale n care forele aerodinamice generalizate
se determin prin calcul direct, aplicarea principiului superpoziiei pentru aceste
fore este imposibil. n aceste cazuri, vom folosi notaiile anterioare dup cum
urmeaz: vectorul Q
0
include fore generalizate de alt natur dect aerodinamic,
iar n Q sunt incluse numai forele aerodinamice generalizate. Atunci, termenul
10
0
+ Q Q va indica toate forele generalizate exterioare i va fi tratat ca o excitaie
exterioar sistemului elastic. Acest mod de lucru ofer o mai mare flexibilitate n
abordrile numerice.
Dac problema este staionar, atunci evident c totul se reduce la sistemul
de ecuaii algebrice neomogen:
0
= + Kq Q Q (2.15)
n care, dac forele aerodinamice se pot liniariza, atunci:
0
= Q A q
Prima formulare, neomogen, permite rezolvarea problemelor de echilibru din
aeroelasticitatea static, iar a doua conduce la identificarea condiiilor de
divergen aeroelastic.
2.3. FORMULAREA PROBLEMEI STRUCTURALE N SPAIUL
STRILOR
Introducnd vectorul strilor x , sistemul se poate scrie n spaiul strilor
ca:
0
= + + x Ax F F (2.16)
n cazul particular al seciunii tipice:
0 1 1 1 1
0
, , ,
h
h
(
= = = =
` ` `
(
) )
)
0 0 I 0
x A F F
M Q M C M K M Q
(2.17)
Mai general, avem:
=
`
)
q
x
q
(2.18)
iar ceilali termeni (matrici, vectori) au expresii identice cu cele din cazul seciunii
tipice. Dac pornim la formularea n spaiul strilor de la ecuaiile de micare scrise
n coordonate naturale, atunci:
0
= + + x Ax F F
(2.19)
cu:
0 1 1 1 1
0
, , ,
(
= = = =
` ` `
(
) ) )
0 0 I 0
x A F F
M Q M C M K M Q
(2.20)
Avantajele utilizrii spaiului strilor pentru diverse aplicaii rezult din cele
urmtoare. Dac se cunoate o soluie iniial, de exemplu
11
{ }
0 0 0
T
h h =
0
x
, atunci soluia general n spaiul strilor a sistemului
este dat de expresia:
( )
( )
( )
0 0
0
t
t t
t d
= + +
A A
x e x e F F (2.21)
sau
( )
( )
( )
0 0
0
t
t t
t d
= + +
A A
x e x e F F
(2.22)
Primul termen al soluiei exprim dependena de datele iniiale i n acelai timp
reprezint contribuia prii omogene a sistemului. Matricea
t A
e realizeaz
tranziia de la starea iniial la cea de la momentul curent i poate fi calculat, n
principiu, orict de precis. Al doilea termen este integrala de convoluie a
solicitrilor exterioare i deci semnific rspunsul forat al sistemului. Expresia
general a soluiei este util ntre altele i pentru:
a. analiza de stabilitate a sistemului aeroelastic n bucl nchis (omogen),
pentru cazul liniar;
b. derivarea unor relaii de calcul aproximative, destinate implementrilor
numerice n care exponeniala unei matrici este dificil de calculat exact.
Vom discuta succint cele dou tipuri de probleme n cele ce urmeaz.
Totui, ca i n cazul sistemului iniial, obinut direct din ecuaiile
Lagrange, i sistemul exprimat n spaiul strilor poate fi rescris urmrind ca
matricea de stare
( )
, A A
s fie diagonal. Dac se consider vectorii proprii la
dreapta ai matricii de stare, grupai de exemplu n matricea | |
1 2
...
n
= R r r r ,
atunci este posibil o schimbare de variabile dat de:
=
1
z R x (2.23)
Matricea R are proprietatea remarcabil c transformarea similar urmtoare
diagonalizeaz matricea de stare:
1
= R A R (2.24)
Procednd astfel, se poate obine un sistem de forma de ecuaii decuplate:
( )
0
= + +
1
z z R F F (2.25)
Soluia general a acestui sistem este atunci:
( )
( )
( ) { }
0 0
0
t
t t
t d
= + +
1
z e z e R F F (2.26)
Datorit faptului c pentru o serie de aplicaii modelul seciunii tipice este
extrem de util i relevant pentru testele numerice, vom prezenta i ecuaiile de
12
micare n acest caz particular. Folosim sistemul diferenial deja scris n coordonate
naturale:
2
1 1
2
2 2 2 2
2 0 1 0 0
0 2 0 1 0
i i
Q
Q
( ( (
+ + =
` ( ( (
)
(2.27)
Regrupnd componentele vectorului x definit mai sus, se obine formularea n
spaiul strilor:
1 1
2
1 1 1
1 1 1
2 2
2
2 2 2
2 2 2
0 1
0
0
2
0
0 1
0
2
Q
d
d
Q
( (
( (
(
= +
` ` `
(
(
(
(
( ) ) )
(2.28)
n care derivatele sunt n raport cu timpul adimensional t
= , definit anterior.
Se observ c este vorba de fapt de dou sisteme de cte dou ecuaii, cuplate
numai prin dependenele forelor generalizate exterioare. Fiecare set de ecuaii este
caracterizat printr-o matrice uor de diagonalizat, dat explicit n relaia anterioar.
Se poate deduce uor c valorile proprii i vectorii proprii la dreapta ai unei astfel
de (sub)matrice sunt (pentru primul bloc):
( ) ( )
( ) ( )
2 2
1 1 1 1 2 1 1 1
1 2 2 2
1 1 1 1 1 1
1 , 1
1 1
,
1 1
r r
= + =
= =
` `
+
) )
(2.29)
Folosind vectorii proprii de mai sus, se definete transformarea pentru primele
dou variabile:
( ) ( )
1 1
2 2
1 1 1 1 1 1 1 1
1 1
,
1 1
z
z
(
(
=
` ` ` `
( +
) )
) )
(2.30)
Se obine atunci urmtorul set de dou ecuaii difereniale de ordinul nti:
( )
( )
( )
( )
2
1 1
2 1
1 1 1 1 1
2
1
2
1 1
2 1
1 1 1 1 1
2
1
1
1
2 1
1
1
2 1
dz
z Q
d
dz
z Q
d
= + +
= +
(2.31)
Remarcm n relaiile anterioare faptul c, la vitez nul, dispar termenii de pe a
doua poziie din dreapta semnului egal. Se regsete atunci problema vibraiilor
libere formulat n spaiul fazelor i n noi coordonate:
13
( )
( )
2
1 1 1
1 1
2
1 1
1 1 1
1 0
0 1
z z
d
z z d
(
+
(
=
` `
(
) )
(
(2.32)
Diagonalizarea n continuare a matricei ntregului sistem este posibil folosind
aceast observaie, care devine important n special n cazul sistemelor de mari
dimensiuni.
2.4 ANALIZA DE STABILITATE A SISTEMULUI AEROELASTIC
LINIAR
2.4.1 Analiza de stabilitate a sistemului aeroelastic liniar pe baza locului
rdcinilor
Pentru sistemul aeroelastic omogen (forele exterioare sunt numai cele
aerodinamice dependente direct de coordonatele generalizate i sunt liniare) avem
ecuaiile de micare date de:
+ + = Mq Cq Kq Q (2.33)
n care vectorul forelor exterioare este presupus a fi exprimat cu ajutorul unor
relaii analitice, folosind matricile reale constante n timp A
2
, A
1
, A
0
care depind de
viteza i densitatea aerului i de anumite caracteristici constructive ale sistemului
aeroelastic:
2 1 0
= + + Q A q A q A q (2.34)
Se obine atunci sistemul omogen dependent de parametrii exteriori vitez i
densitate:
( ) ( ) ( ) ( ) ( ) ( )
2 1 0
, , , V V V + + = M A q C A q K A q 0 (2.35)
n cazul staionar, menionm c sistemul devine unul algebric omogen:
( ) ( )
0
, V = K A q 0 (2.36)
La o nlime / densitate fixat, matricea sistemului este dependent numai de
vitez. Condiia ca sistemul s admit o soluie nebanal devine o ecuaie neliniar
din care se extrage viteza critic de divergen:
( ) ( )
det , 0
div div
V fixat V = = K A (2.37)
Se poate arta uor c totul se reduce la o problem de valori proprii, dac modelul
sistemului aeroelastic este liniar.
n spaiul strilor, acest sistem omogen se poate scrie ca:
( ) , V = x A x (2.38)
14
Soluia unui astfel de sistem omogen cu o condiie iniial oarecare x
0
este,
conform formei generale anterioare:
( )
( ) ,
0
V t
t
=
A
x e x (2.39)
Matricea A este dat de expresia general:
( )
( ) ( ) ( ) ( )
1 1
2 1 2 0
, V
(
=
(
(
0 I
A
M A C A M A K A
(2.40)
Sistemul omogen este stabil dac pentru orice condiie iniial x
0
soluia x(t) tinde
la zero. Folosind valorile proprii (toate distincte) i vectorii proprii la dreapta
corespunztori ai matricii A, grupai n matricea R, este posibil s scriem soluia
anterioar ca:
( )
( ) , 1
0
V t
t
=
x R e R x (2.41)
Sistemul este asimptotic stabil dac i numai dac toate valorile proprii ale matricii
1
= R A R au partea real negativ, adic satisfac condiia:
( ) ( ) ( )
Re , 0 1, 2, 3, 4
j
V j = A (2.42)
La limit cnd partea real este nul, sistemul este neutru stabil. Aceasta sugereaz
o posibilitate eficient pentru investigarea stabilitii sistemului aeroelastic,
pornind direct de la formularea n timp a ecuaiilor de micare.
De exemplu, n condiii de regim incompresibil de curgere, pentru o
nlime / densitate fixat, valorile proprii ale matricii ( ) , V fixat = A sunt
dependente numai de vitez, pentru un sistem aeroelastic liniar dat. Calculnd
valorile proprii ale A pentru valori succesive ale vitezei, pornind de la valoarea
nul a acesteia, obinem cea mai mic valoare a vitezei pentru care partea real a
uneia dintre valorile proprii se anuleaz.
O astfel de metod de investigare a stabilitii sistemului aeroelastic este
deci bazat pe formularea n timp a modelului matematic. Evident, sunt posibile
extensii care s permit cuplajul metodei cu alte modele de determinare a forelor
aerodinamice.
Evident, ne bazm aici pe ipoteza - de bun sim - c sistemul aeroelastic
este un sistem elasto-dinamic asimptotic stabil la vitez nul. n acest sens, am
artat deja c pentru vitez nul obinem, pornind de la fiecare coordonat natural,
un sistem diagonal avnd:
15
( )
( )
2 1
1 1 1 1 1
2 1
1 1 1 1 1
1 0
0 1
dz
z z
d
dz
z z
d
= + +
= +
Se verific uor c prile reale ale valorilor proprii ale matricii diagonale sunt
negative, dac sistemul are amortizare structural ( ) 0 1 < . Dac nu, atunci
prile reale sunt identic nule, iar acest lucru corespunde unei soluii oscilatorii cu
pulsaia
1
.
2.4.2 Analiza de stabilitate a sistemului aeroelastic liniar pe baza formulrii n
frecven
Metoda locului rdcinilor prezentat anterior reprezint o alternativ la
metodele clasice de determinare a flutter-ului, care sunt ns bazate pe formularea
n frecven a sistemului aeroelastic. De exemplu, dac se caut un mod Fourier
de forma ( ) exp( ),
a
t i t R q q , atunci sistemul omogen devine un sistem
algebric liniar cu matrice complex:
( ) ( ) ( ) ( ) ( ) ( )
2
2 1 0
, , , , , ,
c c c
a
V k i V k V k
(
+ + =
M A C A K A q 0
(2.43)
unde am folosit frecvena redus / k b V = . Se impun urmtoarele observaii:
soluia presupus este una oscilatorie, cu amplitudinea avnd cel puin o
component diferit de zero;
sistemul omogen avnd soluie nenul, rezult c este necesar ca matricea
s aib determinantul nul;
matricea complex este formal dependent de mrimile , V . Condiia ca
determinantul complex s aib simultan partea real i imaginar nule
permite determinarea valorilor vitezei i pulsaiei pentru care are loc
flutter-ul prin rezolvarea unui sistem algebric;
matricea sistemului i determinantul sunt funcii neliniare de vitez i
pulsaie i prin urmare rezolvarea sistemului algebric (neliniar) se poate
face numai iterativ. Aceasta a condus la apariia metodelor de tip V-g sau
p-k;
matricele
2 1 0
, ,
c c c
A A A au coeficienii funcii complexe de vitez i
frecvena redus, dac forele aerodinamice sunt date conform modelului
complet Theodorsen, n frecven.
16
Pornind de la sistemul omogen dat anterior i avnd n vedere observaiile
pe marginea acestuia, au fost dezvoltate o serie de metode de cutare a condiiilor
de flutter. Principalul dezavantaj al tuturor acestor metode este faptul c se pot
aplica numai dac modelul sistemului aeroelastic este liniar, fiind deci astfel
excluse ab initio orice extinderi spre modele neliniare. Al doilea dezavantaj
important deriv din faptul c formularea n frecven nu permite determinarea
direct a rspunsului dinamic al sistemului aeroelastic pentru diverse solicitri
exterioare cunoscute.
2.4.3 Discuie asupra modelului Theodorsen
Datorit faptului c modelul Theodorsen este deosebit de utilizat i n prezent, este
util s prezentm cteva detalii privind modul n care acesta este utilizat n diverse
aplicaii. Forma general a expresiei forelor aerodinamice pentru cazul seciunii
tipice este, ntr-o exprimare mixt timp-frecven:
( )
( ) ( )
( ) ( ) ( )
( ) ( ) ( )
2
2 3
2 2
2
1
2
2
1
2 2
2
0 2
P b h V ba Vb V h b a C k
b h ab
Vb C k h b V Vb a C k
h V b C k
( | |
( = + + + =
| (
\
(
= + +
( | | | |
+ + +
( | |
\ \
(
+ +
pentru portana instantanee i
( )
( )
( ) ( ) ( )
2 2 2
2
3 4 2
2 3
1 1
2 8
1 1
2
2 2
1
8
1 1
2 2 1
2 2
M b bah Vb a b a
Vb a V h b a C k
b a h ab a
Vb a C k h Vb a C k
( | | | |
= + +
| | (
\ \
( | | | |
+ + + + =
| | (
\ \
( | | | |
= + + +
( | |
\ \
| | | | | | | |
+ + +
| | | |
\ \ \ \
( ) ( )
2 2
1
0 2
2
h V b a C k
(
+
(
( | | | |
+ + +
( | |
\ \
pentru momentul de tangaj n raport cu centrul elastic, situat la cota a b fa de
mijlocul corzii. Momentul este pozitiv cnd crete incidena profilului. Cota
17
adimensional a este pozitiv cnd centrul elastic este situat n aval de mijlocul
corzii, iar b reprezint semicoarda profilului.
Funcia complex C(k) este denumit funcia lui Theodorsen. Este obinut
n urma ipotezei c profilul are o micare oscilatorie caracterizat de frecvena
redus k i este raportul unor funcii Hankel. Practic, poate fi destul de bine
aproximat numeric folosind diferite aproximaii raionale. De exemplu, pentru
frecvene reduse 5 k < expresia algebric propus de Jones d bune rezultate:
( )
( ) ( )
0.0075 0.10055
0.5
0.0455 0.3
not
C k F k iG k
ik ik
= + + = +
+ +
Este de remarcat c partea real F are o comportare monoton, caracterizat prin
variaia rapid pentru ( ) 0,1 k , dup care tinde asimptotic spre valoarea 0.5.
Componenta imaginar G are o variaie mult mai important, de tip strat limit,
pentru ( ) 0, 0.5 k , unde atinge un minim de cca. -0.185, dup care este monoton
cresctoare spre -0.025.
Ipoteza c micarea este cvasi-staionar nseamn c forele aerodinamice
sunt determinate folosind numai condiiile la limit instantanee datorate micrii de
tangaj-btaie i neglijnd istoria micrii. Practic, aceasta nseamn c n relaiile
anterioare, ( ) 1 C k , adic valoarea funciei Theodorsen pentru k=0. Este de
observat c atunci expresiile portanei i momentului aerodinamic (fa de centrul
elastic) se reduc la:
( ) ( )
( )
( ) ( )
2 3
2 2
2
1
2 2
2
0 2
P b h ab
Vb h b V Vb a
h V b
(
= + +
( | | | |
+ + +
( | |
\ \
(
+ +
i
( )
( )
3 4 2
2 3
2 2
1
8
1 1
2
2 2
1
0 2
2
M b a h ab a
Vb a h Vb a
h V b a
( | | | |
= + + +
( | |
\ \
( | | | | | | | |
+ + + +
( | | | |
\ \ \ \
( | | | |
+ + +
( | |
\ \
Comparnd cele dou variante de calcul a forelor aerodinamice, rezult dou
remarci importante:
18
ambele variante, exact i cvasi-staionar, se pot folosi pentru analiza de
flutter n frecven;
numai varianta cvasi-staionar se preteaz la a fi folosit pentru
determinarea rspunsului dinamic i analiza de flutter n timp.
O simplificare suplimentar a modelului cvasi-staionar se obine neglijnd
efectul numit al maselor aparente, adic termenii cu derivatele de ordin doi ale
celor dou grade de libertate. Se obin atunci:
( )
( ) ( )
2 2
2
1
2 2
2
0 2
P Vb h b V Vb a
h V b
( | | | |
= + + +
( | |
\ \
(
+ +
i
( )
2 3
2 2
1 1
2
2 2
1
0 2
2
M Vb a h Vb a
h V b a
( | | | | | | | |
= + + + +
( | | | |
\ \ \ \
( | | | |
+ + +
( | |
\ \
Observaie: Este cunoscut faptul c utilizarea acestor trei variante ale
relaiilor de calcul poate conduce uneori la diferene destul de importante ntre
rezultate, pentru aceeai problem. Se impune un studiu sistematic al dependenei
termenilor acestor expresii de frecvena redus k, presupunnd oscilaii armonice
ale seciunii tipice, pentru a stabili limitele de valabilitate ale tuturor variantelor
modelului Theodorsen.
2.5 REZOLVAREA PS CU SCHEME CLASICE
Exist o serie de posibiliti de integrare n timp a sistemului ecuaiilor de
micare, att n formularea dedus din ecuaiile Lagrange ct i n formularea n
spaiul strilor. n primul caz, algoritmi de tipul HHT (Hughes-Hilbert-Taylor),
Newmark sau -generalizat i-au dovedit eficiena. Din pcate, sunt n general
caracterizai printr-un efort destul de mare de calcul i prin disipaia numeric
inevitabil. Evaluarea de cel puin dou ori a forelor exterioare la fiecare pas de
timp explic numrul mare de operaii necesar la fiecare iteraie. Dependena
algoritmilor de coeficieni determinai mai mult sau mai puin empiric este o
deficien imposibil de remediat, n timp ce precizia nu poate depi ordinul al
doilea. Pe de alt parte ns, folosirea exprimrii n spaiul strilor a sistemului de
ecuaii permite, cel puin teoretic, integrarea n timp cu scheme de tip Runge-Kutta.
Acestea sunt caracterizate prin acuratee ridicat, dar de asemenea necesit
evaluarea repetat a termenului forelor exterioare.
19
Din acest motiv, calea cea mai simpl de determinare a unui algoritm de calcul
precis i eficient pentru determinarea rspunsului dinamic al sistemului aeroelastic
sau rezolvarea problemei PS - este utilizarea expresiei generale a soluiei exacte a
sistemului aeroelastic, reluat mai jos:
( )
( )
( )
0 0
0
t
t t
t d
= + +
A A
x e x e F F (2.44)
sau chiar a sistemului de ecuaii:
0
= + + x Ax F F (2.45)
Vom considera n cele ce urmeaz c putem reprezenta vectorul forelor
aerodinamice i exterioare ca:
0 0
+ = + F F B U F (2.46)
unde matricea B este constant (apare ca urmare a scrierii forelor aerodinamice
folosind coeficienii adimensionali, de exemplu) iar U conine indirect dependena
de x. Este necesar aceast precizare, pentru c primul termen din dreapta egalitii
anterioare poate fi evaluat numai dup cunoaterea strii actuale, n timp ce F
0
este
independent de stri i poate fi calculat la orice moment de timp.
Dac discretizm semi-implicit sistemul de ecuaii, atunci se obine schema
numeric n care am notat
( )
n n
t X x :
1 1 1
1 0 0
2 2 2
n n n n n n
n n
t
+ + +
+
| | + + +
= + +
|
\
F F X X U U
X X A B (2.47)
care, dac se regrupeaz termenii, conduce la relaia general:
1 n n +
= + + X X U G (2.48)
Am folosit mai sus o schem de tip Newmark cu evaluarea folosind metoda
trapezelor a termenilor din dreapta ecuaiei. Avantajul este disipaia numeric
extrem de redus a schemei numerice rezultate, unde am notat:
( )
1 1
1
1
1 0 0
, ,
2 2 2
1
,
2 2 2
n n
n n
t t t
t
t
t
+
+
( ( (
= + =
( ( (
+ (
= + =
(
I A I A I A B
F F
U U U G I A
(2.49)
La nceputul calculelor (al tranziiei de la un moment de timp la urmtorul), U
n+1
este calculat cu aproximaia
( )
1 1 n n n n +
+ U U U U , iar dup ce se obine o
prim aproximaie a strii x
n+1
se determin exact U
n+1
i apoi se recalculeaz x
n+1
.
Evident, acest proces de calcul fiind semi-implicit, efortul de calcul este mare.
Matricele definite anterior, care realizeaz tranziia de la o stare anterioar la cea
succesiv, sunt constante i pot fi evaluate o singur dat, la nceputul calculelor.
20
Un algoritm asemntor se obine dac se consider timpul t
n+1
n soluia exact
dat mai sus. Atunci:
( )
( ) ( )
1
1
1
1
0 0
0
n
n
n
t
t
n t
d
+
+
+
+
= + +
A
A
X e x e B U F (2.50)
i dup operaii elementare se obine
( )
( )
1
1
1
0
n
n
n
t
t
n t n
t
d
+
+
+
= + +
A
A
X e X e B U F (2.51)
O relaie explicit de calcul, foarte eficace, se obine din egalitatea anterioar dac
se folosete aproximaia
( )
1 1 n n n n +
+ U U U U i integrala forelor
aerodinamice dependente de stri se calculeaz cu metoda trapezelor. Rezult
relaia de calcul:
( )
( )
1
1
1
1
1 0 0
3
2 2
n
n
n
n n
t n n
t
n t n
t
d
+
+
+
+
| | | |
| |
+
| | = + + |
|
| |
\
\ \
A
A
U U
F F
X e X e B (2.52)
Matricele
t A
e i
( )
1
1
n
n
n
t
t
t
d
+
+
A
e se calculeaz cu algoritmi dedicai, foarte
eficieni.
Pentru problema PS, pasul de timp t este determinat din considerente legate
de acurateea cerut de caracterul problemei structurale. Putem spune c exist
posibilitatea ca acest pas de timp:
s fie legat de cea mai mic dintre perioadele proprii de oscilaie ale
sistemului elasto-dinamic (fiind o subdiviziune rezonabil a acesteia), sau
s fie impus de timpul caracteristic al variaiei forelor exterioare F
0
,sau
s rezulte dintr-o condiie de cuplaj cu problema curgerii.
Dac primele dou posibiliti sunt uor de utilizat n practic, cea de-a treia,
care implic de fapt cuplajul dintre solverele PS i CFD, este cea mai delicat.
Experiena de pn acum arat c n marea majoritate a situaiilor practice un
solver CFD explicit necesit un pas de timp cu unul-dou ordine de mrime mai
mici dect impun criteriile de acuratee ale solverului PS. Acest pas de timp este
rezultatul unor criterii de stabilitate numeric, fr o semnificaie fizic direct.
Dac ns solverul CFD este de timp implicit, atunci pasul de timp cu care se poate
avansa soluia problemei curgerii este limitat tot numai din motive de acuratee
SAU poate fi egalat cu cel al problemei dinamicii sistemului aeroelastic. Aceast
alternativ deschide calea spre un cuplaj implicit total ntre solverele CFD i PS i
va fi examinat n cele ce urmeaz.
21
2.6 CUPLAJUL PROBLEMELOR PS I CFD
Pentru probleme neliniare, cu neliniariti de natur structural i mai ales
aerodinamic, rezolvarea problemelor de interaciune fluid-structur se poate face
numai n timp. Acesta presupune cuplarea solverelor CFD i PS, aa cum s-a
artat anterior. Distingem dou posibiliti distincte de abordare a problemei
numerice de interaciune fluid structur:
1. Integrarea separat n timp i cu pai de timp complet diferii a problemelor
curgerii fluidului i respectiv dinamicii structurii, folosind metode distincte
i mai ales bine specializate i cuplajul dintre solvere cu un algoritm
adecvat;
2. Integrarea cuplat a ecuaiilor curgerii fluidului i dinamicii structurii, cu
acelai pas de timp i cuplajul implicit al celor dou solvere.
2.6.1 Problema CFD
Problema curgerii nseamn n contextul prezentei lucrri rezolvarea
numeric a sistemelor de ecuaii Euler sau Navier-Stokes (acestea din urm la
diverse niveluri de aproximaie, laminar, RANS, LES) n regim nestaionar i
determinarea forelor distribuite pe suprafaa corpului aflat n micare la orice
moment de timp este nevoie. Condiia iniial pentru problema curgerii este
reprezentat de o stare staionar cu semnificaie fizic bine-definit. Pentru o
problem de aeroelasticitate, condiiile curgerii la infinit sau n afara influenei
prezenei corpului sunt de regul bine precizate (chiar staionare), iar forele
aerodinamice distribuite pe suprafaa corpului devin atunci funcii neliniare de
componentele vectorului strilor fluidului (mas, impuls i energie intern total pe
unitatea de volum).
2.6.2 Sistemul de ecuaii al problemei CFD
La nivelul cel mai simplu de aproximaie, considernd c fluidul de lucru
este compresibil, nevscos i fr conductivitate termic (modelul Euler), ecuaiile
de micare sunt scrise n forma diferenial conservativ ca:
( ) ( )
0
t x y
+ + =
f U g U U
(2.53)
unde am notat vectorul strilor fluidului i fluxurile convective cu:
2
2
, ,
u v
u p uv
u
uv v p
v
p p
u E v E E
+
+ = = =
` ` `
| | | |
+ +
) | |
\ \ ) )
U f g (2.54)
22
Presiunea se obine n funcie de mrimile de stare pe baza unor ecuaii de stare:
( ) ( )
( ) ( )
2 2
, 1
2
u v
p t E
(
+
= (
(
z (2.55)
Sistemul Euler prezentat este hiperbolic n raport cu variabila timp.
Dac fluidul de lucru este tot nevscos, dar incompresibil, atunci ecuaiile de
micare, scrise tot n form conservativ propus de Chorin, sunt:
( ) ( )
0
i i
t x y
| |
+ + =
|
\
f V g V
V
(2.56)
unde am notat:
2
2
2
0
1 , , 1 , ,
1 1
i i
P u v
u u P uv
v uv v P
(
(
(
(
= = = = + =
` ` `
(
(
(
+ (
) ) )
V f g
(2.57)
iar P p = . Menionm aici doar faptul c factorul de compresibilitate este
un parametru al curgerii, ca i densitatea (constant) i trebuie precizat. Acest
sistem nu mai necesit alte ecuaii de stare. Din pcate, n formularea de mai sus
sistemul Euler pentru curgeri incompresibile are caracter mixt.
2.6.3 Condiia la limit la suprafaa corpului i cuplajul cu problema PS
Condiia la limit de pe suprafaa corpului n micare este cea care
cupleaz de fapt problema curgerii la problema PS (la orice moment de timp i
pentru orice punct de pe suprafa):
( ) ( ) ( )
, ,
x y n
u n v n w t S t + = z z x (2.58)
n relaia anterioar, viteza normal a suprafeei corpului este ( ) ,
n n
w w = x x .
Condiia iniial a problemei fluidului sunt:
( ) ( )
0
, 0 t = = U z U z (2.59)
Dac se cunoate presiunea pe suprafaa corpului n micare, atunci forele
aerodinamice generalizate se determin pe baza expresiei lucrului mecanic virtual:
( )
0
0 0
S
L p dS =
w x n (2.60)
n care w sunt deformaii exprimate ca funcii liniare de coordonatele generalizate.
Din expresia anterioar rezult forele generalizate din problema PS:
23
( ) ( ) ( )
, p = Q Q U x x (2.61)
Algoritmul de rezolvare a problemei CFD pentru curgeri compresibile cu un solver
explicit
n cele ce urmeaz, presupunem c rezolvarea problemei CFD se face cu
un solver de tip Godunov, n care discretizarea spaial cu o metod cu volume
finite este cuplat cu rezolvarea unor probleme Riemann pe interfee i cu
avansarea explicit n timp. Dup discretizarea spaial, sistemul Euler de ecuaii
cu derivate pariale devine un sistem de ecuaii difereniale ordinare cuplate de
forma:
( ) ( )
, , 1, 2,..,
f f e
e
d
e N
dt
= =
U
R U x x (2.62)
Termenul din dreapta reprezint efectele fluxurilor normale de mas, impuls i
energie prin interfeele celulei curente :
( )
1
e
f
e x y
e
n n d
= +
R f g
(2.63)
Aceste fluxuri sunt evaluate numeric, n sens upwind, aa cum o cere caracterul
hiperbolic al sistemului Euler. Avansarea explicit n timp a soluiei se face de
obicei cu o schem de tip Runge-Kutta, varianta Jameson, pasul de timp fiind
limitat de condiie de stabilitate numeric. O astfel de condiie nseamn de fapt o
restricie impus pasului de timp, astfel nct informaia care se propag cu viteza
cea mai mare la nivelul fiecrei celule,
max e
e
V c + , s nu parcurg o distan mai
mare dect o dimensiune caracteristic a celulei,
e
l . Ordinul de mrime al pasului
de timp (global) este dat deci de (condiia Courant):
max
min , 1, 2,..,
f f e
e
e
e
l
t e N
V c
=
`
+
)
(2.64)
Cum n relaia anterioar numitorul fraciei este de fapt viteza de propagare a
undelor acustice i este dependent de condiiile locale ale curgerii, din punct de
vedere practic condiia impus asupra pasului de timp reprezint mai mult dect o
simpl restricie privind avansarea n timpul fizic. Un simplu exerciiu arat c
pentru dimensiuni uzuale,
4 3
10 10 sec.
f
t
i este variabil de la un moment
la altul. Aceast observaie ne permite s anticipm dificulti importante atunci
cnd solverul CFD trebuie cuplat cu unul PS, pentru care paii de timp difer
considerabil.
Observaie: Pentru curgeri incompresibile, rezolvarea numeric direct se
poate face numai folosind o schem implicit ori semi-implicit. Formal, putem
spune c dup discretizarea spaial cu volume finite i tratarea implicit a
24
fluxurilor se ajunge la rezolvarea unui sistem algebric neliniar pentru determinarea
V la pasul de timp nou, de forma:
( )
,
0
f i
= R V
Desigur, rezolvarea direct a acestui sistem este ineficient, dac nu chiar
imposibil numeric. Avantajele unui solver explicit se regsesc dac pentru
rezolvarea sistemului neliniar este folosit o formulare n timpul dual:
( )
,
,
f i
V
R V
Acesta este acum un sistem de ecuaii difereniale cuplate, perfect asemntor cu
cel obinut pentru curgerile compresibile.
2.6.4 Cuplajul CFD cu problema PS
Problema numeric de rezolvat de ctre solverul structural este:
( ) ( )
0
, = + + x Ax F U x x F (2.65)
n care vectorul forelor aerodinamice dependente de starea structurii sunt formal
date de:
( ) ( ) ( )
1
, p
=
`
)
0
F
M Q U x x
(2.66)
Problema structural este nchis fixnd condiiile iniiale:
( )
0
0 t = = x x (2.67)
La momentul iniial, structura elastic i fluidul formeaz un sistem aflat n
echilibru (staionar) i prin urmare condiiile iniiale ale structurii i fluidului
trebuie s fie corelate. Cauza evoluiei sistemului fluid-structur ulterioar
momentului iniial provine dintr-o perturbaie exterioar, fie a strii fluidului, fie a
celei a structurii. Menionm de asemenea faptul c, n general, dimensiunea
problemei PS este net inferioar celei a problemei CFD. Exemplul seciunii tipice
este foarte elocvent, n sensul c vectorul strilor structurii cuprinde exact patru
termeni, iar cel al strilor fluidului are cel puin patru mii, dac rezolvarea
problemei CFD folosete o discretizare spaial rudimentar.
Avnd n vedere numai rezolvarea numeric a unei probleme de
interaciune fluid-structur, sistemul de ecuaii difereniale de rezolvat este:
( ) ( )
( ) ( )
( )
( )
0
0
,
,
0
cu
0
f
d
dt
t
t
(
= (
`
+
( )
= =
= =
R U x x
U
x Ax F U x x
U U
x x
(2.68)
25
Din aceast formulare se observ cuplajul neliniar dintre problemele PS i CFD.
Principalul aspect care trebuie remarcat din formularea cuplat este c vectorii
strilor fluidului i structurii, U i x, sunt calculai la exact aceleai momente de
timp, n ambele sub-sisteme de ecuaii.
Soluionarea problemei cuplate se poate face cu solvere specializate,
decuplat, urmnd un algoritm de tip time-staggered. Astfel de algoritmi au
specific faptul c avansarea n timp a soluiilor celor dou sub-probleme se face
succesiv: sau soluia problemei PS sau soluia problemei CFD este folosit pentru a
avansa cu cealalt soluia celeilalte probleme. Argumentele cele mai des invocate
n favoarea acestei abordri sunt urmtoarele:
a) Exist metode specializate pentru rezolvarea eficient a fiecreia dintre
cele dou probleme. Mai mult, dac problema structural este obinut prin
discretizarea cu MEF a ecuaiilor dinamicii structurii (Cauchy), atunci este
posibil ca algoritmul de soluionare a problemei PS s fie formulat pentru
sistemul de ecuaii difereniale de ordinul doi prezentat anterior. n acest
mod se menine avantajul de a opera cu matrice ale maselor i rigiditilor
rare i generate direct pe baza MEF.
b) Pasul de timp al solverului structural,
s
t , este de regul cu unul-dou
ordine de mrime mai mare dect cel necesar pentru solverul CFD. Aceasta
nseamn c pentru a avansa n timp cu soluia problemei cuplate, este
necesar fie sub-ciclarea problemei CFD pentru a aduce soluia CFD la
nivelul temporal al celei PS (varianta economic), fie avansarea soluiei PS
cu pasul de timp cerut de solverul CFD (varianta aberant, complet ne-
economic).
Variante ale algoritmilor de tip time-staggered sunt prezentate succint n
continuare. Vom presupune n cele ce urmeaz c perturbaia fa de starea de
echilibru este dat de o modificare a strii structurii. n acest fel, echilibrul iniial
ntre strile fluidului i structurii se rupe. Conform cu aceast ipotez de lucru i cu
notaiile folosite mai jos, ( )
0 0
, U x este o stare de echilibru staionar, iar ( )
0 1
, U x
este momentul de la care ncep calculele, n care x
1
este o stare perturbat fa de
x
0
.
Algoritmul cel mai simplu este urmtorul (n = 0,1,2,...):
a) Soluia X
n+1
a problemei structurale este condiia la limit pentru problema
CFD, de unde se calculeaz U
n+1
(pornind de la U
n
) cu un algoritm explicit,
folosind subciclri (acestea sunt impuse de faptul c pasul de timp al
solverului CFD este diferit i mai ales mult mai mic n mod uzual dect
1 n n
t t t
+
= ).
( ) ( )
1 1 1
, , 1.. , ,
f n n f n n e
e
d
e N t t t
dt
+ + +
( = =
U
R U X X
.
26
b) Din U
n+1
se determin noua presiune pe suprafaa corpului, p
n+1
.
c) Cu noile fore generalizate se rezolv problema structural,
( ) ( )
1 1 2 2
, , ,
n n n n n n
t t t
+ + + +
( = +
x Ax F U X X X
Evident, principalul dezavantaj al acestui algoritm convenional este faptul c att
noua stare a fluidului (pasul (a)) ct i starea structurii (pasul (c)) sunt calculate cu
valori vechi ale poziiei structurii, respectiv strii fluidului. Algoritmul are numai
ordinul nti de precizie global i este deci nesatisfctor pentru calculele de
aeroelasticitate, pentru c pentru pai mari de timp conduce la erori importante ale
energiei calculate a sistemului.
O precizie mbuntit se obine cu algoritmul propus de Farhat i
Lesoinne (1998) i care are la baz ideea de a decala cu / 2 t cele dou evoluii,
ale strilor fluidului i structurii. Practic, aceasta nsemn c dac starea structurii
se calculeaz la momentele n, n+1,.., starea fluidului se determin la momentele
intermediare n-1/2, n+1/2,.. . Secretul algoritmului const n faptul c starea
structurii folosit drept condiie la limit pentru soluionarea problemei CFD este
una intermediar, evaluat numai aproximativ prin
1
2
1
2
n
n n
f s s
t
+
= + X X X
.
Derivatele temporale ale strii structurii (sunt de fapt viteze i acceleraii
generalizate) care sunt folosite n relaia anterioar se obin din
( )
1
1
n n n
s s s
t
+
=
X X X
.
Paii algoritmului sunt urmtorii (n=1,2,..):
a) Cu soluia
n
s
X a problemei PS i cu soluia iniial
1
2
n
U a problemei CFD
se determin soluia problemei curgerii avansnd la starea
1
2
n+
U (cu starea
intermediar a structurii dat de
1
2
1
2
n
n n
f s s
t
+
= + X X X
drept condiie la
limit) :
1 1 1
2 2 2
, 1.. , ,
n n n
f f e
e f
d
e N t t t
dt
+ + | | | | (
= =
| | (
|
\
\
U
R U X .
b) Din
1
2
n+
U se determin noua presiune pe suprafaa corpului,
1
2
n
p
+
.
c) Cu presiunea
1
2
n
p
+
i pornind de la soluia
n
s
X a problemei structurale se
rezolv
1 1 1
1
2 2 2
, ,
n n n
n n
f
p t t t
+ + +
+
| | | | | |
( = + | | |
| |
\ \ \
x Ax F U X pentru
1 n
s
+
X .
27
d) Se calculeaz starea intermediar
3
1 1
2
1
2
n
n n
f s s
t
+
+ +
= + X X X
. Aceasta este
starea folosit pentru a fixa condiiile la limit pentru problema CFD de la
pasul (a).
Folosind decalajul / 2 t ntre momentele de timp la care sunt calculate strile
structurii i fluidului, precizia temporal este de ordinul al doilea. Pasul b servete
la evaluarea eficient a strii intermediare a structurii, fr o rezolvare completa a
problemei PS.
n principiu deci, orice algoritm tip time-staggered este eficient, dar nu
respect condiia menionat anterior privind calculul simultan al strilor fluidului
i structurii. Acest fapt conduce la precizia temporal limitat la cel mult ordinul al
doilea pentru soluia problemei cuplate.
Alternativa la algoritmii prezentai o reprezint integrarea simultan n
timp a celor dou probleme, CFD i PS, folosind un pas de timp comun. Cum
acesta este dictat n primul rnd de precizia i eficiena cerute de problema propriu-
zis, algoritmii numerici nu pot fi dect implicii.
2.7 ALGORITM IMPLICIT DE SOLUIONARE SIMULTAN A PS I
CFD
Este cunoscut faptul c pentru a rezolva numeric eficient o problem CFD
cu un algoritm implicit este necesar o platform hardware cu performane
considerabile. Acest lucru se datoreaz faptului c algoritmii implicii conduc la
rezolvarea repetat a unor sisteme algebrice neliniare de foarte mari dimensiuni.
Pentru a elimina acest incovenient, Jameson i apoi ali autori (Dubuc, Badcock,
Gaitonde) au dezvoltat o serie de algoritmi bazai pe cutarea soluiei sistemului
neliniar (rezultat din discretizarea implicit) prin avansarea ntr-un timp fictiv,
numit dual.
2.7.1 Soluionarea implicit a problemei CFD folosind timpul dual
Curgeri compresibile
Vom considera n cele ce urmeaz discretizarea implicit a sistemului
Euler pentru curgeri compresibile nestaionare, bazat pe aproximarea backward
de ordinul k a derivatei temporale de tipul:
( )
1
1
1 1
,
k
p
n n
p
t t p
+
=
=
U
U U U U (2.69)
28
Dac folosim o aproximare de ordinul al doilea pentru evaluarea derivatei
temporale i o discretizare spaial cu volume finite, atunci schema numeric
implicit este de forma:
( )
1 1
1
3 4
2
n n n
f n
t
+
+
+
+ =
U U U
R U 0 (2.70)
Evident, acesta este un sistem algebric cuplat de ecuaii neliniare. Reziduul
reprezint aici numai efectele fluxurilor dintre celule. Condiiile la limit care sunt
incluse n calculul reziduului R sunt la nivelul de timp actual, adic la
1 n
t
+
. Dup
Jameson, o modalitate eficient de soluionare a problemei neliniare anterioare este
folosirea unui proces iterativ bazat pe timpul dual. Pentru condiiile la limit fixate
la timpul fizic
1 n
t
+
, prin avansarea n timpul dual
*
t a sistemului:
( )
1 1
1 1
*
3 2 .5
0
2
n n n
n f n
t t t
+
+ +
| | | |
+ + + =
| |
\ \
U U U
U R U (2.71)
se poate obine la limit cnd
*
t soluia dorit
1 n+
U . Prin urmare, putem
obine soluia nestaionar
1
not
n+
= U W dac definim reziduul modificat prin:
( ) ( )
1
,*
3 2 .5
2
n n
f f
t t
| |
= + +
|
\
U U
R W W R W (2.72)
i rezolvm problema diferenial:
( )
( )
,* *
*
*
0,
0
f
n
d
t
dt
t
+ =
= =
W
R W
W U
(2.73)
Rezolvarea acestei noi probleme pseudo-tranzitorii se face cu o schem de tip
Runge-Kutta, n varianta Jameson. Pentru accelerarea convergenei, se folosete
pasul de timp local i netezirea implicit a reziduului. Fluxurile prin interfeele
dintre volumele finite se calculeaz n sens upwind, n raport cu timpul dual. Din
punct de vedere formal, noua problem de rezolvat poate fi considerat ca
rezultnd din sistemul de ecuaii Euler modificat, cu termeni de tip surs, de forma:
Curgeri incompresibile
Pornind de la ecuaiile de micare scrise n form conservativ folosind
compresibilitatea artificial:
( ) ( )
0
i i
t x y
| |
+ + =
|
\
f V g V
V
(2.74)
unde P p = i:
29
2
2
2
0
1 , , 1 , ,
1 1
i i
P u v
u u P uv
v uv v P
(
(
(
(
= = = = + =
` ` `
(
(
(
+ (
) ) )
V f g
(2.75)
se procedeaz ca i n cazul compresibil. Discretizarea de ordinul al doilea a
derivatei temporale i evaluarea implicit a fluxurilor conduc la un sistem neliniar
pentru a crui rezolvare se folosete timpul dual. Se obine sistemul de ecuaii
difereniale cuplate de mai jos, care se rezolv pentru condiii la limit la momentul
1 n
t
+
:
( )
1 1
1 , 1
*
3 2 .5
0
2
n n n
n f i n
t t t
+
+ +
| | | |
+ + + =
| |
\ \
V V V
V R V (2.76)
Fluxul convectiv contribuie la fiecare celul cu integrala:
( )
,
1
e
f i i i
e x y
e
n n d
= +
R f g
(2.77)
Se obine astfel problema care trebuie rezolvat la fiecare pas de timp fizic:
( )
( )
, ,* 1 *
*
*
0, ,
0
f i n
n
d
t
dt
t
+
+ = =
= =
W
R W W V
W V
(2.78)
unde am notat reziduul total:
( )
1
, , ,
3 2 .5
2
n n
f i f i
t t
| |
= + +
|
\
V V
R W R W (2.79)
Avantajul utilizrii timpului dual este c practic se rezolv o problem de mari
dimensiuni cu o schem implicit, dar printr-o succesiune de probleme rezolvate
explicit. Desigur, exist i o serie de dezavantaje, dintre care menionm n primul
rnd faptul c pentru oprirea procesului de convergen, n timpul dual, al
solverului explicit criteriul clasic este:
R (2.80)
Este clar c un astfel de criteriu implementat numeric nu garanteaz i faptul c
soluia obinut este i cea corect.
Pasul de timp dual este dependent de pasul de timp fizic t i trebuie
s ndeplineasc o condiie de stabilitate numeric de forma:
30
* *
1 2
,
3 3
2
e e
e e
e
t t t
V c
l t
+
+
(2.81)
2.7.2 Soluionarea implicit a problemei PS folosind timpul dual
Considerm problema structural dat de sistemul:
( ) ( )
0
, = + + x Ax F U x x F (2.82)
Atunci, aproximarea de ordinul al doilea al derivatei temporale i evaluarea
implicit a celorlali termeni conduce la sistemul algebric neliniar:
( )
1 1
1 1
0
3 4
2
n n n
n n
t
+
+ +
+
= + +
x x x
Ax F U F (2.83)
Remarcm n ecuaia anterioar cuplajul cu problema CFD, implicit, pentru c al
doilea termen din dreapta conine forele aerodinamice determinate la starea nou a
structurii. Folosind acelai timp dual
*
t , pentru rezolvarea problemei algebrice
neliniare de mai sus se poate folosi atunci problema diferenial:
( )
1 *
*
*
0, ,
( 0)
s n
n
d
t
dt
t
+
+ = =
= =
y
R y y x
y x
(2.84)
unde am notat reziduul structural
( )
1
1
0
3 4
2 2
n n
s n
t t
+
| | +
= +
|
\
x x
R y Ay F U F (2.85)
Soluionarea unei astfel de probleme n timpul dual se poate face cu o schem de
tip Runge-Kutta. Principalul avantaj este c termenii neliniari sunt astfel tratai ca
atare, fr simplificri suplimentare.
Se impune i reluarea urmtoarei observaii. Dac problema structural
este formulat folosind coordonate naturale, atunci datorit formei particulare a
ecuaiilor decuplare pe blocuri, matrici diagonale acestea se pot rezolva analitic
pentru fore generalizate exterioare date, constante. Totui, pentru ca algoritmii
propui s rmn funcionali i n cazul unor probleme cu neliniariti structurale,
integrarea numeric folosind o schem de tip Runge Kutta cu patru-cinci pai
rmne varianta cea mai avantajoas de implementare ntr-un program de calcul.
2.7.3 Cuplajul implicit al solverelor PS i CFD
Scopul principal al introducerii solverelor implicite este avansarea
simultan n timpul fizic a celor dou probleme fizice, a curgerii i respectiv a
structurii. Acest lucru este posibil practic numai dac sunt folosii algoritmi
31
implicii pentru soluionarea ambelor probleme. Presupunem c sunt cunoscute
valorile soluiilor la nivelele temporale anterioare 1 n i n c dorim determinarea
strii sistemului fluid-structur la momentul 1 n + . Pasul de timp fizic t este
dictat de raiuni practice. Avem aadar, n forma semi-discret, problemele
algebrice neliniare:
( ) ( )
( )
1 1
1 1
1 1
1 1
0
3 4
2
3 4
2
n n n
f n n
n n n
n n
t
t
+
+ +
+
+ +
+
+ =
= + +
U U U
R U x 0
x x x
Ax F U F
(2.86)
Folosind timpul dual
*
t , se formuleaz problema diferenial general:
( )
( )
( )
,* 1 *
*
*
1 *
*
0, , 0
,
0, , ( 0)
not
f n n
not
s n n
d
t
dt
t
d
t
dt
+
+
+ = = = =
+ = = = =
W
R W W U W U
y
R y y x y x
(2.87)
unde reziduurile sunt date de:
( ) ( )
( )
1
,*
1
1
0
3 2 .5
2
3 4
2 2
n n
f f
n n
s n
t t
t t
+
| |
= + +
|
\
| | +
= +
|
\
U U
R W W R W
x x
R y Ay F U F
(2.88)
Condiiile la limit pe interfaa dintre fluid i structur sunt incluse n aceste
reziduuri. Ecuaiile anterioare sunt cuplate implicit. n principiu, avansnd simultan
n timpul dual, cuplajul implicit este asigurat. Avansarea se face cu un solver de tip
Runge-Kutta, cu patru-cinci pai. Soluia staionar obinut n timpul dual pentru
sistemul cuplat reprezint soluia la timpul fizic 1 n + .
Totui, se impune urmtoarea observaie. Convergena spre starea staionar a
soluiei sub-problemei structurale este mult mai rapid dect cea a soluiei sub-
problemei fluidului. Aceasta conduce la:
necesitatea de a utiliza pai de timp dual diferii i deci la
posibilitatea ca n timpul dual s integrm separat cele dou sisteme de
ecuaii, pentru structur i respectiv fluid.
Algoritmul implicit de cuplaj n timpul dual al problemelor CFD i PS este
diferit de cele descrise anterior, clasice. Precizia n timp este superioar i poate fi
crescut, dac este nevoie, adoptnd aproximri de ordin superior pentru derivata
temporal.
32
2.8 BIBLIOGRAFIE SUPLIMENTAR
La redactarea materialului prezentat n acest capitol am utilizat, pe lng
bibliografia crii, i urmtoarele articole de specialitate:
Alonso, J.J., Jameson, A. (1994), Fully-Implicit Time-Marching Aeroelastic
Solutions, AIAA Paper 94-0056, 32nd AIAA Aerospace Sciences Meeting and
Exhibit, January 10-13, Reno, NV.
Carstens, V., Kemme, R., Schmitt, St. (2003), Coupled simulation of flow-structure
interaction in turbomachinery, Aerospace Science and Technology 7 298-306.
Liu, F., Cai, J., Zhu, Y. (2001), Calculation of Wing Flutter by a Coupled Fluid-
Structure Method, Journal of Aircraft, Vol. 38, No. 2, March-April 2001.
Sadeghi, M., Liu, F. (2001), Investigation of Non-Linear Flutter by a Coupled
Aerodynamics and Structural Dynamics Method, AIAA 2001-0573, 39th AIAA
Aerospace Sciences Meeting and Exhibit, January 8-11, Reno, NV.
S-ar putea să vă placă și
- Cerere CardEUDocument1 paginăCerere CardEUPetronius TrandafirÎncă nu există evaluări
- MatlabDocument7 paginiMatlabGabriela Dinca100% (1)
- Introducere În Metoda Elementului FinitDocument37 paginiIntroducere În Metoda Elementului FinitZavoi TeodorÎncă nu există evaluări
- Stadiul Actual Al Cercet. Privind Curgerea in Med. PoroaseDocument22 paginiStadiul Actual Al Cercet. Privind Curgerea in Med. PoroaseIuga VasileÎncă nu există evaluări
- Introducere În Metoda Elementului FinitDocument37 paginiIntroducere În Metoda Elementului FinitZavoi TeodorÎncă nu există evaluări
- Cap 6Document26 paginiCap 6Iuga VasileÎncă nu există evaluări
- MatlabDocument7 paginiMatlabGabriela Dinca100% (1)
- Mecanica FluidelorDocument115 paginiMecanica FluidelorIerli Bogdan89% (9)
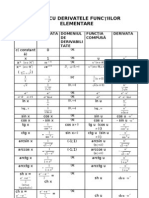
- TABEL CU DERIVATELE FUNCŢIILOR ELEMENTARE-cls 11Document2 paginiTABEL CU DERIVATELE FUNCŢIILOR ELEMENTARE-cls 11Razvan Andrei Munteanu100% (4)
- PolimeriDocument108 paginiPolimeriRasnoveanu GeorgianaÎncă nu există evaluări
- AvionDocument14 paginiAvionIuga VasileÎncă nu există evaluări
- Curs - Analiza NumericaDocument288 paginiCurs - Analiza Numericacipriandiaconu86% (7)
- Sisteme HidrauliceDocument23 paginiSisteme HidrauliceIuga VasileÎncă nu există evaluări
- Cunoasterea PlanoruluiDocument22 paginiCunoasterea PlanoruluiIuga VasileÎncă nu există evaluări
- Aspecte Morale Și Doctrinare În Opera Sfântului Dorotei de GazaDocument11 paginiAspecte Morale Și Doctrinare În Opera Sfântului Dorotei de GazaIuga VasileÎncă nu există evaluări