S-ar putea să vă placă și
- Matrici PivotareDocument11 paginiMatrici PivotareRobert BulgaruÎncă nu există evaluări
- MN Lab 4 PDFDocument14 paginiMN Lab 4 PDFPetree BaaÎncă nu există evaluări
- CN Lab3 PDFDocument7 paginiCN Lab3 PDFCosmina PătruțÎncă nu există evaluări
- L6 Algoritmi Paraleli de Rezolvare Sisteme EcuatiiDocument10 paginiL6 Algoritmi Paraleli de Rezolvare Sisteme EcuatiiHirjoaba ElenaÎncă nu există evaluări
- Programare DinamicaDocument6 paginiProgramare DinamicaNatacha SchitcoÎncă nu există evaluări
- Geometrie S7Document14 paginiGeometrie S7George PinteaÎncă nu există evaluări
- UC Algebra Liniara Cu Mathcad 1Document22 paginiUC Algebra Liniara Cu Mathcad 1Dragos PreoteasaÎncă nu există evaluări
- Integrarea Numerica A FunctiilorDocument8 paginiIntegrarea Numerica A FunctiilorDannyÎncă nu există evaluări
- MN Curs3 Sisteme LiniareDocument4 paginiMN Curs3 Sisteme LiniareMarius BiolaruÎncă nu există evaluări
- Curs8 MicuDocument48 paginiCurs8 Micugi0nelÎncă nu există evaluări
- Fizica Barem Umanist RomDocument2 paginiFizica Barem Umanist RomGicu ClÎncă nu există evaluări
- Probleme Complexitati Si SolutiiDocument9 paginiProbleme Complexitati Si SolutiiRareș EnacheÎncă nu există evaluări
- Seminar 6 - EstimareDocument13 paginiSeminar 6 - EstimareRusu IuliuÎncă nu există evaluări
- MN Lab3-CorectDocument7 paginiMN Lab3-CorectnanacitesteÎncă nu există evaluări
- Metoda Liniara A Gradientilor ConjugatiDocument9 paginiMetoda Liniara A Gradientilor ConjugatiVulpe FlorianÎncă nu există evaluări
- MatAplEcon Tema 13 Note CursDocument8 paginiMatAplEcon Tema 13 Note CursTudor MinascurtaÎncă nu există evaluări
- Algoritmi Avansați 2021 c-3Document25 paginiAlgoritmi Avansați 2021 c-3Warlord UrsaÎncă nu există evaluări
- Fuzzyficare Si DefuzzyficareDocument32 paginiFuzzyficare Si Defuzzyficaredaniel_dan_daniÎncă nu există evaluări
- CN Lab2Document10 paginiCN Lab2pisica134Încă nu există evaluări
- Mathcad - Exemplu Calcul Sarpanta Lemn 02Document8 paginiMathcad - Exemplu Calcul Sarpanta Lemn 02Roinita MariaÎncă nu există evaluări
- Metode Analitice de Ajustare A Seriilor CronologiceDocument5 paginiMetode Analitice de Ajustare A Seriilor CronologiceGrecu OanaÎncă nu există evaluări
- El GamalDocument15 paginiEl Gamalovidiu_amigoÎncă nu există evaluări
- Infasuratoare ConvexaDocument6 paginiInfasuratoare ConvexaBereschi PaulÎncă nu există evaluări
- c5 PDFDocument50 paginic5 PDFIlie OxaniÎncă nu există evaluări
- Curs 1 Micu MNDocument32 paginiCurs 1 Micu MNNicole Hanson100% (1)
- (InfoIasi) (FII) (FAI) Model Examen Final + Solutii (Iunie 2010 - A)Document4 pagini(InfoIasi) (FII) (FAI) Model Examen Final + Solutii (Iunie 2010 - A)Diana Todiroae100% (2)
- ISA CursDocument85 paginiISA CursfasolăiÎncă nu există evaluări
- SimplexDocument9 paginiSimplexDumitru GrițcanÎncă nu există evaluări
- Sistemeliniare PDFDocument39 paginiSistemeliniare PDFLeonard StãnescuÎncă nu există evaluări
- Barem Matematica ClujDocument2 paginiBarem Matematica ClujFanatik.ro50% (2)
- Etajarea Schimbatorului de Viteze Si Trasarea Diagramei Fierastrau TeoreticeDocument3 paginiEtajarea Schimbatorului de Viteze Si Trasarea Diagramei Fierastrau TeoreticeelisabetaÎncă nu există evaluări
- Sol ADocument4 paginiSol ACosmin AlexandruÎncă nu există evaluări
- Lucrare 1Document3 paginiLucrare 1Paisie RusuÎncă nu există evaluări
- Valori PropriiDocument7 paginiValori PropriiCodescu RaduÎncă nu există evaluări
- Barem Matematica EN - 2024 - FDocument2 paginiBarem Matematica EN - 2024 - FZsido MarianaÎncă nu există evaluări
- Model en Sim II Barem Buc ModelDocument3 paginiModel en Sim II Barem Buc ModelIoana NicolescuÎncă nu există evaluări
- InformaticaDocument12 paginiInformaticaCristina GoreaÎncă nu există evaluări
- Tema Alg AproximativiDocument2 paginiTema Alg AproximativiStefan PopescuÎncă nu există evaluări
- Calculul Treptei de Reglaj CurtisDocument10 paginiCalculul Treptei de Reglaj CurtisJeremyYmerehÎncă nu există evaluări
- Mate - Info.Ro.5462 SIMULARE BACALAUREAT 2023 - DOLJ - TEHNOLOGICDocument3 paginiMate - Info.Ro.5462 SIMULARE BACALAUREAT 2023 - DOLJ - TEHNOLOGICZahiuÎncă nu există evaluări
- 138-143 0Document6 pagini138-143 0cpanaitescuÎncă nu există evaluări
- Laborator Metode NumericeDocument4 paginiLaborator Metode NumericeFlorin GheorgheÎncă nu există evaluări
- MNDocument22 paginiMNGabriel EnăşoaieÎncă nu există evaluări
- TemaDocument9 paginiTemaFlorin AdrianÎncă nu există evaluări
- Metode Numerice CursDocument9 paginiMetode Numerice CursMonica AlbuÎncă nu există evaluări
- Metode Numerice - SimplexDocument11 paginiMetode Numerice - SimplexMc GabyÎncă nu există evaluări
- Teorie Matematică Bacalaureat 2014Document19 paginiTeorie Matematică Bacalaureat 2014lucipaun100% (1)
- 2023 Barem Vii Olm AbDocument3 pagini2023 Barem Vii Olm AbAndra-Alexandra PopescuÎncă nu există evaluări
- Sisteme de EcuaSISTEME DE ECUATII LINIARE. METODA LUI GAUSStii Liniare. Metoda Lui GaussDocument7 paginiSisteme de EcuaSISTEME DE ECUATII LINIARE. METODA LUI GAUSStii Liniare. Metoda Lui GaussZsofia PopÎncă nu există evaluări
- Proiectarea AlgoritmilorDocument26 paginiProiectarea AlgoritmilorRaul RotaruÎncă nu există evaluări
- C 4 Egcd 2 Ps 20152016Document20 paginiC 4 Egcd 2 Ps 20152016mateiuliÎncă nu există evaluări
- Laborator 3 PCDocument3 paginiLaborator 3 PCmateiuliÎncă nu există evaluări
- Curs CNDocument41 paginiCurs CNmateiuliÎncă nu există evaluări
- Iulian Temp SensDocument1 paginăIulian Temp SensmateiuliÎncă nu există evaluări
- Laborator7 BDocument1 paginăLaborator7 BCorneliu Florin PascuÎncă nu există evaluări
- A. Platon - Apărarea Lui SocrateDocument46 paginiA. Platon - Apărarea Lui SocratemateiuliÎncă nu există evaluări
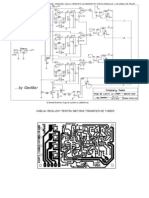
- Schema Electrica + Cablaj + Silkscreen Orga Cu LM324Document3 paginiSchema Electrica + Cablaj + Silkscreen Orga Cu LM324catalin0827Încă nu există evaluări