S-ar putea să vă placă și
- Factorii de Dezvoltare A Logisticii - Bazele LogisticiiDocument12 paginiFactorii de Dezvoltare A Logisticii - Bazele LogisticiiMike WazovskiÎncă nu există evaluări
- Republica MoldovaDocument13 paginiRepublica MoldovaDumitru GrițcanÎncă nu există evaluări
- Contractarea InternationalaDocument6 paginiContractarea Internationalapaisaiulia100% (1)
- Polistirenul Lazar DianaDocument10 paginiPolistirenul Lazar Dianadidi didiÎncă nu există evaluări
- Asociatii21092015 1Document700 paginiAsociatii21092015 1puisormultisor8009Încă nu există evaluări
- Procesul Decizional de Cumparare Al Unui Televizor LEDDocument6 paginiProcesul Decizional de Cumparare Al Unui Televizor LEDGeorgiana DanielaÎncă nu există evaluări
- Analiza Strategica in Cadrul Unei Firme FictiveDocument9 paginiAnaliza Strategica in Cadrul Unei Firme FictiveRadu ApostolÎncă nu există evaluări
- Laboratorul 2 Algoritmul Simplex Metoda Celor Dou A Faze PDFDocument3 paginiLaboratorul 2 Algoritmul Simplex Metoda Celor Dou A Faze PDFcvacasa50Încă nu există evaluări
- L05 - SISD - Rezolvarea Problemelor de Optimizare A TransportuluiDocument16 paginiL05 - SISD - Rezolvarea Problemelor de Optimizare A TransportuluiCatalin LaurentiuÎncă nu există evaluări
- Cele cinci forțe ale lui Porter: Înțelegeți forțele concurențiale și rămâneți în fața concurențeiDe la EverandCele cinci forțe ale lui Porter: Înțelegeți forțele concurențiale și rămâneți în fața concurențeiÎncă nu există evaluări
- Modelul ConceptualDocument12 paginiModelul Conceptualbeatricec.2004Încă nu există evaluări
- MadarDocument116 paginiMadarAmalia GeorgianaÎncă nu există evaluări
- Articolul Stiintific - MicroDocument5 paginiArticolul Stiintific - MicroMaya IoanaÎncă nu există evaluări
- Lucrarea 6. Decizii in Conditii de Risc. Met Arborelui DecizionalDocument7 paginiLucrarea 6. Decizii in Conditii de Risc. Met Arborelui DecizionalSerban Popa0% (1)
- Cercetarea Imaginii MagazinuluiDocument10 paginiCercetarea Imaginii MagazinuluiMihalceanu BogdanÎncă nu există evaluări
- Mărfuri Nealimentare - Ceramica: Universitatea Transilvania Din BraşovDocument11 paginiMărfuri Nealimentare - Ceramica: Universitatea Transilvania Din Braşoveugenia100% (1)
- Proiect MacroeconomieDocument7 paginiProiect MacroeconomieStefan Nicu100% (1)
- OnicescuDocument3 paginiOnicescuStefania BeatriceÎncă nu există evaluări
- Diagrama ParetoDocument3 paginiDiagrama ParetoBebicu MihaiÎncă nu există evaluări
- Curs 4 - Calitate PrețDocument15 paginiCurs 4 - Calitate PrețMirela AntonÎncă nu există evaluări
- Ipoteze Ex - Timp NrPoliteDocument11 paginiIpoteze Ex - Timp NrPoliteOdnbl GrdniiÎncă nu există evaluări
- Riscul NaturalDocument6 paginiRiscul NaturalAnna HristianÎncă nu există evaluări
- Curs 1Document9 paginiCurs 1Livia MariaÎncă nu există evaluări
- Metoda SimplexDocument8 paginiMetoda SimplexValentin IacubÎncă nu există evaluări
- Fisa de Documentare SRA 4Document4 paginiFisa de Documentare SRA 4siposÎncă nu există evaluări
- 04 - Marja Bruta Vs Adaos Comercial - 18012021 - AADocument4 pagini04 - Marja Bruta Vs Adaos Comercial - 18012021 - AADanielaÎncă nu există evaluări
- Auchan PestleDocument2 paginiAuchan PestleBogdanos RaduÎncă nu există evaluări
- Lucru IndividualDocument8 paginiLucru IndividualMarin NegaraÎncă nu există evaluări
- S.C. Fidias Com S.r.l.-ModificatDocument50 paginiS.C. Fidias Com S.r.l.-ModificatmadalinaÎncă nu există evaluări
- Ce Este IntreprindereaDocument11 paginiCe Este IntreprindereaCameliaAndreea100% (1)
- Ideea Mea de AfacereDocument4 paginiIdeea Mea de AfacereDiana StascuÎncă nu există evaluări
- Expertiza Marfurilor CeramicaDocument11 paginiExpertiza Marfurilor CeramicaMichael Jordan100% (1)
- PrezentareDocument7 paginiPrezentareAlex Crooitoru100% (1)
- Analiza Cifrei de Afaceri La Engie Romania SADocument14 paginiAnaliza Cifrei de Afaceri La Engie Romania SABogdanMBossÎncă nu există evaluări
- Cercetare de Marketing Pentru Televizorul LGDocument4 paginiCercetare de Marketing Pentru Televizorul LGKvl AdyyÎncă nu există evaluări
- Modelul Fluxului CircularDocument7 paginiModelul Fluxului CircularaleecssandraaÎncă nu există evaluări
- Curs5 Econometrie RLM (I)Document25 paginiCurs5 Econometrie RLM (I)AdinaFraierÎncă nu există evaluări
- Analiza Unui S.R.A.Document21 paginiAnaliza Unui S.R.A.Boca Iulian GabrielÎncă nu există evaluări
- Seminar 4 Management SDocument9 paginiSeminar 4 Management SBogdanos RaduÎncă nu există evaluări
- Curs 5 CerereDocument15 paginiCurs 5 CerereMarcus DippertÎncă nu există evaluări
- Politica de Preturi in RMDocument11 paginiPolitica de Preturi in RMTrifan_DumitruÎncă nu există evaluări
- Ambalajele Si Mediul InconjuratorDocument3 paginiAmbalajele Si Mediul InconjuratorEcaterina GajiuÎncă nu există evaluări
- Tema 04.02.2017Document10 paginiTema 04.02.2017agrosiv barladÎncă nu există evaluări
- Cap 4 SISTEMUL PREŢURILOR ÎN ROMANIADocument28 paginiCap 4 SISTEMUL PREŢURILOR ÎN ROMANIALaura CretuÎncă nu există evaluări
- Atestat Cererea Si OfertaDocument28 paginiAtestat Cererea Si OfertaSabina CiorpacÎncă nu există evaluări
- Materiale SanatoaseDocument11 paginiMateriale SanatoaseAlin Nitescu100% (2)
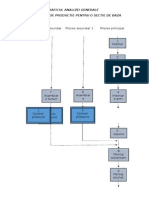
- Graficul Analizei Generale A Procesului de ProductieDocument2 paginiGraficul Analizei Generale A Procesului de ProductieAndrei DobreÎncă nu există evaluări
- Regimuri de Curs de SchimbDocument25 paginiRegimuri de Curs de SchimbAlina AncaÎncă nu există evaluări
- Proiect Altex UnireaDocument11 paginiProiect Altex UnireaGeany DanielÎncă nu există evaluări
- Circuitul Economic de Ansamblu PDFDocument16 paginiCircuitul Economic de Ansamblu PDFMihaela PetreaÎncă nu există evaluări
- Tipuri de ProductieDocument21 paginiTipuri de ProductieCarmen Buturca-CioataÎncă nu există evaluări
- Proiect Model Liniar UnifactorialDocument14 paginiProiect Model Liniar UnifactorialAlina MateiaseviciÎncă nu există evaluări
- Microeconomie ManagerialaDocument6 paginiMicroeconomie ManagerialaDarie LeoleaÎncă nu există evaluări
- Modalitati de Evaluare A Riscului Operational in Bancile ComercialeDocument10 paginiModalitati de Evaluare A Riscului Operational in Bancile ComercialeCatalina BogosÎncă nu există evaluări
- Tehnici Promotion Ale La Nivelul MagazinuluiDocument13 paginiTehnici Promotion Ale La Nivelul MagazinuluiComsa MihaelaÎncă nu există evaluări
- Modelare Si SimulareDocument21 paginiModelare Si Simulareandrei ralucaÎncă nu există evaluări
- CapII AEF Spraten ExempluDocument18 paginiCapII AEF Spraten ExempluAlina SavacencoÎncă nu există evaluări
- MODALITATEA DE EXAMINARE Model Plan de Afaceri Test Grila Si Subiecte SintezaDocument58 paginiMODALITATEA DE EXAMINARE Model Plan de Afaceri Test Grila Si Subiecte Sintezaniccolas2002Încă nu există evaluări
- Curs Cad CamDocument3 paginiCurs Cad CammidymÎncă nu există evaluări
- Dispoz Modul 1 (NXPowerLite)Document46 paginiDispoz Modul 1 (NXPowerLite)Mihaela Dana MarinescuÎncă nu există evaluări
- Algoritmul SimplexDocument5 paginiAlgoritmul SimplexMonica FaturaÎncă nu există evaluări
- Evaluare Excel.Document2 paginiEvaluare Excel.Dumitru GrițcanÎncă nu există evaluări
- Cosman Stanislav P1831 Lab11 26 02 2021Document4 paginiCosman Stanislav P1831 Lab11 26 02 2021Dumitru GrițcanÎncă nu există evaluări
- Fisa LacurileDocument2 paginiFisa LacurileDumitru GrițcanÎncă nu există evaluări
- Fişa Tehnologică de Asamblare Şi Dezasamblare A Unităţilor Centrale Ale Calculatoarelor PersonaleDocument2 paginiFişa Tehnologică de Asamblare Şi Dezasamblare A Unităţilor Centrale Ale Calculatoarelor PersonaleDumitru GrițcanÎncă nu există evaluări
- Fisa LacurileDocument2 paginiFisa LacurileDumitru GrițcanÎncă nu există evaluări
- Ptoiect Druta 1Document1 paginăPtoiect Druta 1Dumitru GrițcanÎncă nu există evaluări
- An - III (2) Moodle 2pDocument3 paginiAn - III (2) Moodle 2pDumitru GrițcanÎncă nu există evaluări
- C-2011 Varianta IDocument3 paginiC-2011 Varianta IDumitru GrițcanÎncă nu există evaluări
- Lab 11 Sub I 26 02 2021 - Rezolvarea Sistemelor de Ecuaţii Regula Cramer GaussDocument3 paginiLab 11 Sub I 26 02 2021 - Rezolvarea Sistemelor de Ecuaţii Regula Cramer GaussDumitru GrițcanÎncă nu există evaluări
- Test La Educația FizicăDocument1 paginăTest La Educația FizicăDumitru GrițcanÎncă nu există evaluări
- Limba Si Literatura Romana 3 2012Document25 paginiLimba Si Literatura Romana 3 2012Dumitru GrițcanÎncă nu există evaluări
- Varianta 19Document5 paginiVarianta 19Dumitru GrițcanÎncă nu există evaluări
- Regulile Necesare Pentru o Comunicare Eficientă În ȘcoalăDocument1 paginăRegulile Necesare Pentru o Comunicare Eficientă În ȘcoalăDumitru GrițcanÎncă nu există evaluări
- Administrarea DisciplineiDocument1 paginăAdministrarea DisciplineiDumitru GrițcanÎncă nu există evaluări
- Lab 10 Sub I 12 02 2021Document1 paginăLab 10 Sub I 12 02 2021Dumitru GrițcanÎncă nu există evaluări
- Test La Educația FizicăDocument1 paginăTest La Educația FizicăDumitru GrițcanÎncă nu există evaluări
- FinalitateDocument1 paginăFinalitateDumitru GrițcanÎncă nu există evaluări
- Lab 11 Sub I 26 02 2021 - Rezolvarea Sistemelor de Ecuaţii Regula Cramer GaussDocument3 paginiLab 11 Sub I 26 02 2021 - Rezolvarea Sistemelor de Ecuaţii Regula Cramer GaussDumitru GrițcanÎncă nu există evaluări
- Simplex Exemplu 2Document5 paginiSimplex Exemplu 2Dumitru GrițcanÎncă nu există evaluări
- CO204 - Algoritmul Simplex PDFDocument8 paginiCO204 - Algoritmul Simplex PDFAnda AndutzaÎncă nu există evaluări
- SimplexDocument9 paginiSimplexDumitru GrițcanÎncă nu există evaluări
- Tema 11Document2 paginiTema 11Dumitru GrițcanÎncă nu există evaluări
- Simplex Exemplu 2Document5 paginiSimplex Exemplu 2Dumitru GrițcanÎncă nu există evaluări
- Evaluare 3 - SIMPLEXDocument4 paginiEvaluare 3 - SIMPLEXDumitru GrițcanÎncă nu există evaluări
- Simplex Exemplu 2Document5 paginiSimplex Exemplu 2Dumitru GrițcanÎncă nu există evaluări
- Simplex ExempluDocument5 paginiSimplex ExempluDumitru GrițcanÎncă nu există evaluări
- CO204 - Algoritmul Simplex PDFDocument8 paginiCO204 - Algoritmul Simplex PDFAnda AndutzaÎncă nu există evaluări