S-ar putea să vă placă și
- 1.TesteElectronist Retele de Telecomunicatii - FinalDocument529 pagini1.TesteElectronist Retele de Telecomunicatii - FinalClaudiu Radu100% (1)
- Sipos Emilia, Ivanciu Laura, Dispozitive Electronice. Probleme RezolvateDocument128 paginiSipos Emilia, Ivanciu Laura, Dispozitive Electronice. Probleme RezolvateBraveCoyote100% (1)
- Cerere Tip Gradatii 2022Document1 paginăCerere Tip Gradatii 2022Claudiu RaduÎncă nu există evaluări
- Adeverinta-Calificative CandidatDocument1 paginăAdeverinta-Calificative CandidatClaudiu RaduÎncă nu există evaluări
- Elemente de Execuție - IntroducereDocument2 paginiElemente de Execuție - IntroducereClaudiu RaduÎncă nu există evaluări
- GM - 2022 - Fisa - Evaluare - TehnologiiDocument6 paginiGM - 2022 - Fisa - Evaluare - TehnologiiClaudiu RaduÎncă nu există evaluări
- 2021 Opis Dosar Cerere TipDocument4 pagini2021 Opis Dosar Cerere TipMariana BiliciÎncă nu există evaluări
- EE Cu Motoare Electrice de CCDocument1 paginăEE Cu Motoare Electrice de CCClaudiu RaduÎncă nu există evaluări
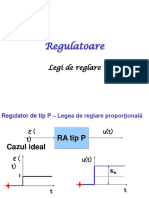
- Regulatoare Legi de ReglareDocument16 paginiRegulatoare Legi de ReglareClaudiu RaduÎncă nu există evaluări
- Traductoare de DeplasareDocument3 paginiTraductoare de DeplasareClaudiu RaduÎncă nu există evaluări
- Clasificarea TraductoarelorDocument3 paginiClasificarea TraductoarelorClaudiu RaduÎncă nu există evaluări
- AO Noţiuni IntroductiveDocument5 paginiAO Noţiuni IntroductiveClaudiu RaduÎncă nu există evaluări
- Traductoare Inductive de DeplasareDocument1 paginăTraductoare Inductive de DeplasareClaudiu RaduÎncă nu există evaluări
- AO Noţiuni IntroductiveDocument5 paginiAO Noţiuni IntroductiveClaudiu RaduÎncă nu există evaluări
- Fișa de Lucru Unitatea CentralăDocument2 paginiFișa de Lucru Unitatea CentralăClaudiu RaduÎncă nu există evaluări
- 35 - Populatia Dupa Domiciliu La 1 Iulie PDFDocument1 pagină35 - Populatia Dupa Domiciliu La 1 Iulie PDFClaudiu RaduÎncă nu există evaluări
- Traductoare Capacitive de DeplasareDocument1 paginăTraductoare Capacitive de DeplasareClaudiu RaduÎncă nu există evaluări
- Deceniul Digital Al Europei - CE Trasează Calea Către o Europă Autonomă Din Punct de Vedere Digital Până În 2030 - Piata FinanciaraDocument2 paginiDeceniul Digital Al Europei - CE Trasează Calea Către o Europă Autonomă Din Punct de Vedere Digital Până În 2030 - Piata FinanciaraClaudiu RaduÎncă nu există evaluări
- Curriculum 11 Automatizari 2018Document53 paginiCurriculum 11 Automatizari 2018Claudiu RaduÎncă nu există evaluări
- Strategia - VET 27 04 2016 PDFDocument100 paginiStrategia - VET 27 04 2016 PDFRodica PascalÎncă nu există evaluări
- La Șaguna, BV - Laboratorul Dotat Cu Tehnologie Virtual Reality Pregătește Elevii Pentru Viața Reală - EurActivDocument4 paginiLa Șaguna, BV - Laboratorul Dotat Cu Tehnologie Virtual Reality Pregătește Elevii Pentru Viața Reală - EurActivClaudiu RaduÎncă nu există evaluări
- Programa TUA Clasa 11Document9 paginiPrograma TUA Clasa 11Claudiu RaduÎncă nu există evaluări
- 35 - Populatia Dupa Domiciliu La 1 Iulie PDFDocument1 pagină35 - Populatia Dupa Domiciliu La 1 Iulie PDFClaudiu RaduÎncă nu există evaluări
- Totul Despre Procesele Automatizate - Tehnovest - Ro - Blog PDFDocument5 paginiTotul Despre Procesele Automatizate - Tehnovest - Ro - Blog PDFClaudiu RaduÎncă nu există evaluări
- 34 Populatia 1 Ian PDFDocument1 pagină34 Populatia 1 Ian PDFClaudiu RaduÎncă nu există evaluări
- ArticolDocument11 paginiArticolClaudiu RaduÎncă nu există evaluări
- Conventie Pregatire PracticaDocument6 paginiConventie Pregatire PracticaDumitru Marius BogdanÎncă nu există evaluări
- Pas 2018 2022 Model BuzauDocument102 paginiPas 2018 2022 Model BuzauClaudiu RaduÎncă nu există evaluări
- Plan European de Dezvoltare Institutionala - LpsDocument62 paginiPlan European de Dezvoltare Institutionala - Lpsantonalina445616Încă nu există evaluări