Documente Academic
Documente Profesional
Documente Cultură
Cap 9
Încărcat de
Ionut AndreiTitlu original
Drepturi de autor
Formate disponibile
Partajați acest document
Partajați sau inserați document
Vi se pare util acest document?
Este necorespunzător acest conținut?
Raportați acest documentDrepturi de autor:
Formate disponibile
Cap 9
Încărcat de
Ionut AndreiDrepturi de autor:
Formate disponibile
MECANISMUL DE TRANSLAIE
9.1. MECANISMUL DE TRANSLAIE N REGIM STAIONAR
Mecanismul de translaie asigur transportul pe orizontal a sarcinii. Deplasarea se poate face
pe ci cu ine de rulare sau pe ci fr ine (autopropulsate). Mecanismul de translaie se poate monta
pe vehicul sau n afara lui caz n care tractarea se face prin cablu (troliul mecanismului fiind montat pe
contrabraul macaralei).
Organele folosite pentru deplasare pot fi roi de rulare cu obad rigid sau roi cu pneuri. Roile
pot fi conductoare sau conduse.
Roile conductoare prin legtura cinematic cu mecanismul de translaie asigur micarea
vehiculului (macara, crucior) datorit aderenei dintre obad i calea de rulare.
Considernd regimul staionar, vehiculul se deplaseaz cu viteza constant v, sub aciunea
forei de traciune F
H
egal i de sens contrar rezistenei opuse de mecanism la deplasare W, dat de
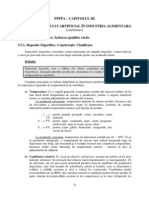
rezistena la rulare dintre roat, buza roii i in, nscrierea n curb, panta cii de rulare, etc.(fig.9.1).
Asupra roilor acioneaz fora Q
'
dat de greutatea sarcinii Q i a vehiculului echipat G (Q
'
= Q+G),
consumndu-se putere pentru nvingerea cuplului static. Pentru mecanismele ce funcioneaz n
incinte nchise, pe cale rectilinie, orizontal, cuplul static are o component dat de frecrile ce iau
natere n lagrele roilor i o component dat de frecarea cu rostogolire ntre roat i calea de rulare.
Componenta cuplului de frecri n lagre este:
2
d
Q M
'
1
= (9.1)
unde: 3 - coeficient de frecare cu alunecare (0,08...0.105
pentru lagre de alunecare, 0.005 pentru lagre de
rostogolire);
3d - diametrul fusului roii [m].
Prin frecarea cu rostogolire a roii pe calea de
rulare se determin componenta cupului de rostogolire:
f Q M
'
2
=
unde f = 0,05..0,1 [cm] i reprezint coeficient de frecare cu rostogolire.
n regim staionar puterea dezvoltat de motorul de acionare este utilizat pentru ntreinerea
micrii cu vitez constant v, a mecanismului de translaie caracterizat de cuplul static M
1
+ M
2
( )
1 2
Wv M M = + e, (9.3)
unde: 3= - viteza unghiular a roilor [rad/s];
3
2
D
= v e [m/s] - viteza de deplasare a mecanismului.
Obinem astfel rezistena de deplasare a mecanismului datorat frecrilor
) f 2 d (
D
Q
W
'
+ = (9.4)
Raportnd la unitatea de 1 tf, se obine rezistena unitar la naintare
D
d f 2
w
1
+
= (9.5)
pentru care se recomand ca valori medii:
7 [Kgf/tf] pentru montaj pe lagre de rostogolire;
9 99 9
CAPITOLUL
Fig. 9.1 Explicativ pentru
determinarea rezistenei la naintare
Q
'
Q
'
f
F
H'
W
t
v
D
d
Q
'
=
Q
'
d/2
Instalaii de ridicat i transportat 52
20 [Kgf/tf] pentru montaje pe lagre de alunecare.
Datorit unor inexactiti de construcie i de montaj, a roilor motoare, pozarea cii de rulare,
rigiditatea orizontal a cadrului, vehiculul poate cpta un mers n deriv, astfel c fora dat de
rezistena de deplasare se mrete cu frecrile suplimentare dintre buza roii i suprafaa lateral a inei
:
'
f
'
f
Q w K ) f 2 d (
D
Q
W = + = (9.6)
unde: K
f
= 2,0...2,6 pentru lagre de alunecare;
K
f
= 1,35...1,6 pentru lagre de rostogolire;
w - coeficientul de rezisten la traciune
nscrierea mecanismului n curbe, pe calea de rulare determin apariia unor rezistene
suplimentare la deplasare datorate alunecrilor transversale i longitudinale a roilor.
Unghiul de nclinare a roilor la tangenta cii de rulare (fig.9.2.a) este:
c
c
2 , 1
R 2
b
)
2
s
R ( 2
b
sin =
= (9.7)
Astfel roata va aluneca transversal pe calea de rulare cu viteza tangenial = sin v v
t
,
determinnd apariia rezistenei suplimentare la alunecare transversal:
'
c
0
t
'
0
at
Q
R 2
b
V
v Q
W =
= (9.8)
unde: b - ampatamentul cii de rulare;
s - ecartamentul cii de rulare;
R
c
- raza medie a cii de rulare;
0
- coeficientul de frecare dintre roat i in
nscrierea n curb (fig.9.2b) determin parcurgerea unor spaii inegale pe inele interioare i
exterioare la un unghi de rotire v.
Roile fiind legate rigid va apare o alunecare longitudinal. Spaiul de alunecare este:
2
S
l l l l l
2 1
= = = A (9.9)
Astfel apare rezistena la alunecare longitudinal:
Fig. 9.2 Explicativ determinare rezisten deplasare n curb
a b
53
'
r
c
0
'
r 0
al
Q
R 2
S
l
l Q
W =
A
= (9.10)
unde: Q'
r
- ncrcarea distribuit roilor legate rigid de pe ine diferite. Echiparea
mecanismelor de translaie cu roi conice (fig.9.3) determin apariia unei rezistene suplimentare de
alunecare la deplasare, determinat de vitezele diferite la obada roii. Spaiile parcurse la o rotaie
complet de roat i punctele extreme de pe roat 1,2 sunt:
) tg B D ( S
) tg B D ( S
D S
2
1
o + t =
o t =
t =
(9.11)
unde: D - diametrul mediu al roii
B - proiecia pe orizontal a limii active a roii
K - unghiul de nclinare al tlpii profilului.
Spaiul mediu de alunecare va fi:
o t = = A tg B
2
1
) S S (
2
1
S
2
(9.12)
Fora de frecare suplimentar determinat de normala la calea de rulare este:
o
= =
cos
Q
N F
'
0 0 f
(9.13)
Astfel apare rezistena suplimentar la alunecare datorat conicitii roilor:
o
o
=
A
= tg
D 2
B
cos
Q
S
S
F W
'
0 f a
(9.14)
Mecanismele care acioneaz n spaii deschise sunt supuse aciunii forei vntului care
determin rezistena la deplasare:
e ve s vs v
A P A P W
+ = (9.15)
unde: P
vs
,P
ve
- presiunea vntului asupra sarcinii i elementelor construciei me-canismului
determinate conform STAS;
A
s
,A
e
- suprafeele sarcinii i elementelor de construcie a mecanismului supuse aciunii
vntului.
n cazul deplasrii pe cale de rulare cu pant, forele de frecare
vor fi date de componenta dup direcia normal la planul cii (Q' ~
cosK), iar rezistena suplimentar de deplasare:
o = sin Q W
'
d
(9.16)
unde: K - panta cii de rulare admis
Se obine astfel rezistena total la deplasare a mecanismului de
translaie:
d a ae at f t
W W W W W W + + + + = (9.17)
Puterea n regim staionar a motorului de acionare a
mecanismului de translaie este:
q
=
v W
P
t
(9.18)
unde: v [m/s] - viteza de translaie a mecanismului; N - randamentul global al mecanismului.
B
D
N
N
1
2
K
Q
Fig. 9.3 Explicativ alunecare
roi conice
Instalaii de ridicat i transportat 54
9.2. DETERMINAREA CONDIIEI DE ADEREN
Deplasarea apare sub aciunea forei de traciune determinat de aderena roilor motoare la
calea de rulare ca urmare a frecrii. n condiiile n care fora de frecare (fora aderent) este mai mic
dect fora de traciune, micarea nu se va produce, rupndu-se legtura dintre roat i calea de rulare,
aprnd fenomenul de patinare.
Se impune determinarea numrului roilor motoare, deoarece nu toate roile mecanismului de
translaie sunt cuplate ntotdeauna la sistemul de acionare.
Se considerm sarcina distribuit roilor motoare i nemotoare astfel: Q
a
- ncrcarea ce revine
roilor acionate; Q
n
- ncrcarea ce revine roilor neacionate
Cuplul determinat de fora aderent este :
2
D
Q M
a 1 a
= (9.19)
unde: 15 , 0 12 , 0
1
~
1
- coeficient de frecare n repaus ntre roat i calea de rulare
(coeficient de aderen)
Acest cuplu trebuie s nving cuplurile determinate de frecrile cu rostogolire determinate de
toate roile mecanismului de translaie i de cel al frecrilor cu alunecare din axul roilor nemotoare.
( )
2
d
Q K f Q Q M
n f n a f
+ + = (9.20)
Micarea este determinat de condiia:
M
a
> M
f
nlocuind se obine:
( )
2
d
Q K f Q Q
2
D
Q
n f n a a 1
+ + > (9.21)
Considernd coeficientul de siguran la aderen
15 , 1 > | i innd seama c Q
n
= Q'-Q
a
, se obine:
D d
k f 2 D
Q Q
1
f '
a
+
+
u = (9.22)
Se alege numrul roilor acionate astfel nct relaia
s fie satisfcut.
La mecanismele la care poziia centrului de greutate este variabil, verificarea condiiei de
aderen se face pentru acea poziie pentru care ncrcarea roilor acionate este minim. n cazul n
care fora aderent este prea mic, se vor aciona toate roile mecanismului.
Alegerea numrului de roi de rulare ale unui mecanism de translaie se face funcie de
ncrcarea maxim admis pe roat i de caracteristicile mecanismului de translaie. n cazul unei
ncrcri mari se trece la sprijinirea mecanismului pe boghiuri (fig.9.4). Adoptarea numrului de roi se
face din condiia de investiie minim. Un numr mare de roi scumpete mecanismul dar ieftinete
calea de rulare ca urmare a unei ncrcri uniforme a acesteia. Distanele de la roi la articulaii se aleg
astfel nct pe toate roile s existe aceiai ncrcare. nlimea boghiului trebuie redus pn la
ncrcarea minim pe care fora longitudinal aprut n timpul frnrii o transmite integral
crucioarelor boghiului.
ncrcrile pe toate roile boghiului ar fi egale dac toate articulaiile ar fi plasate la nlimea
axelor roilor, lucru care practic este imposibil.
Fig. 9.4 Repartiie sarcin pe bogiuri
H
a
H/2
'
1
N
a ''
2
N
'
2
N
''
1
N
N
2
N
1
N
b
h
2
h
1
H/2
H
55
La nscrierea n curbe cu raz mic de curbur, boghiul este prevzut cu articulaie vertical sau
cu brae ce se pot roti liber fa de calea de rulare.
n anumite situaii ncrcarea pe roat poate fi variabil funcie de poziia sarcinii (ex. - pod
rulant - fig.9.5): unde:G
c
- greutate crucior; G - greutate
pod; Q - sarcina; L - deschidere pod; X - poziie curent
sarcin. ncrcrile maxime respectiv minime se
determin pentru poziiile extreme ale mecanismului fa
de roat n prezena i absena sarcinii la echilibru:
=
=
0 M
0 M
B
A
(9.23)
Mecanismele cu deplasare prin cablu, asigur reducerea greutii i forelor de inerie.
Principalul dezavantaj l constituie cantitatea mare de cablu utilizat, care are o durabilitate mic n
exploatare.
9.3. ELEMENTE COMPONENTE ALE TRANSLAIEI
Crucioarele au rolul de a susine echipamentul de ridicare a sarcinii i de a asigura micarea de
translaie. Din punct de vedere constructiv crucioarele pot fi: cu destinaie general sau speciale.
Crucioarele cu destinaie general (fig.9.6), se compun din: echipamentul de ridicare a sarcinii
1, dispozitivul de translaie 2 i asiul cruciorului.
Crucioarele speciale le nlocuiesc pe cele cu destinaie general, cnd se dorete obinerea
unei exploatri economice i cu productivitate mare. n acest categorie sunt incluse crucioarele cu
echipament auxiliar de ridicare, crucioarele cu graifr, crucioarele cu electromagnet, crucioarele cu
bra rotitor i crucioarele cu mai multe viteze.
Mecanismul de translaie poate fi acionat manual sau electric.
Acionarea manual este utilizat mai ales la grinzile suspendate
pentru sarcini mici. La acionarea electric sistemul de translaie se
construiete n mai multe variante funcie de caracteristicile
mecanismului.
Sistemul de translaie cu motor i reductor central (fig.9.7), se compune din: motorul electric de
acionare 1, cuplajul cu frn 2, reductorul 3, arborele
de transmitere 4 i roile 5 de
deplasare a mecanismului.
Soluia este adoptat la
mecanismele cu deschidere
mic i mijlocie i turaie mic
a arborelui.
Sistemul de translaie cu dou reductoare de vitez amplasate lng
roile de rulare i motorul central (fig.9.8), cu aceiai componen ca i
precedentul sistem, se utilizeaz la mecanismele cu deschidere mare i
vitez unghiular mic a arborelui de transmitere 4.
Sistemul de translaie cu transmisii
independente cu i fr arbore electric (fig. 9.9),
asigur antrenarea independent pe fiecere cale
de rulare. La sistemul fr arbore electric,
1
v
x
v
y
2
3
4
5
Fig. 9.6 Crucior cu
destinaie general
Fig. 9.7 Translaie cu motor i
reductor central
1 2 3
4
5 5
Fig. 9.8 Translaie cu dou reductoare
6
5 4 3 2 1 2 3 4 5
Fig. 9.9 Translaie cu transmisie de capt
6 4 3 2 1 1 2 3 4 6
5
5
Fig. 9.5 Explicativ ncrcare roi rulare
L/2
G
L/2
Q+G
c
x
A
B
L/2
Instalaii de ridicat i transportat 56
motoarele 1, dispuse simetric de capetele mecanismului acioneaz prin intermediul cuplajelor cu frn
2, reductoarelor 3 i arborele de transmitere 4, asupra roilor de rulare 5.
Mecanismul de translaie cu cablu (fig.9.10), se ntrebuineaz de obicei la crucioarela
macaralelor turn, ale macaralelor funicular, etc., permind
deplasarea pe planuri nclinate cu viteze i acceleraii relativ mari. Aezrea mecanismului de translaie
n afara cruciorului permite uurarea i simplifi-carea acestuia. Are n componen: mecanismul de
translaie 1, mecanismul de ridicare a sarcinii, cablul de traciune crucior 3 i ridicare 4.
Mecanismele de translaie pitoare se folosesc la instalaiile cu vitez mic de deplasare. La
aceste mecanisme, greutatea proprie a instalaiei este deplasat prin intermediul dispozitivelor de
sprijin, a cror poziie reciproc se modific n timp.
9.4. DIAGRAMA DE SARCIN LA MECANISMULDE TRANSLAIE
Verificarea puterii motorului de acionare impune cunoaterea diagramei de sarcin M = f(t)
(fig.9.11). n cazul mecanismelor de translaie, un ciclu de funcionare se compune de regul din
operaiile:
- deplasarea mecanismului sub sarcin;
- deplasarea mecanismului fr sarcin (n gol).
Cunoscnd cinematica mecanismului de translaie pe ntreg ciclul de funcionare, se determin
cuplurile statice i dinamice corespunztor fiecrui interval de timp al ciclului de funcionare, obinnd
astfel n baza ecuaiei fundamentale a micrii, cuplul motor:
d s
M M M + = (9.24)
unde: M - cuplul motor;
M
s
- cuplul static;
M
d
- cuplul dinamic.
a) Diagrama de sarcin$ la deplasarea n sarcin$
Cuplul dezvoltat de motorul de acionare n regim staionar la deplasarea sub sarcin este egal
cu cuplul static necesar deplasrii sarcinii:
2
D
i
W
M M
1
1 s
q
= = (9.25)
unde: W
1
- rezistena la naintare opus de mecanismul de translaie n sarcin;
i - raportul de transmitere total al mecanismului;
N
1
- randamentul transmisiei.
n perioada de pornire la deplasarea sub sarcin, cuplul dezvoltat de motor conform ecuaiei
fundamentale a micrii este:
M
+
M
=
M d1 s1 p1
(9.26)
Fig. 9.14 Mecanism de translaie cu cablu
T
4 T
1
T T
0
T
3
T
2
Q
2
1
v
c
4
3
=
TT
=
TT
57
unde:
dt
d
J M
1 p dl
e
= - cuplul dinamic n perioada de accelerare; c =
e
dt
d
- acceleraia
ungiular a arborelui motor; J
p1
- momentul de inerie total al maselor n micare de translaie i rotaie
raportate la arborele motor.
Pentru mecanismul de translaie cuplul static i momentul de inerie pot fi considerate n
general constante, dac se neglijeaz pendularea sarcinii, aciunea vntului i nclinarea mecanismului.
Momentul de inerie echivalent redus la arborele motor, innd seama de randamentul
mecanismului se obine din condiia de conservare a energiei:
j
q
1 j
2
2
j
j
n
1 k k
2
k
k
1 p
v m
i
J
J J q
e
+
q
+ =
= =
(9.27)
unde: J - momentul de inerie al maselor n micare de rotaie cu viteza =;
J
k
- momentul de inerie al maselor n micare de rotaie cu viteza =
k
;
m
j
- mase n micare de translaie cu viteza v
i
;
= - viteza unghiular a arborelui motor;
N - randamentul transmisiei.
La frnarea mecanismului de translaie se obine cuplul (fig.9.11):
2 d 1 s 1 f
M M M = (9.28)
unde:
dt
d
J M
1 d 2 d
e
= - cuplul dinamic la decelerare;
J
d1
- momentul de inerie al maselor n micare de translaie i rotaie raportat la arborele
motor la frnare pentru care se obine:
j
q
1 j
2
2
j
j
k
n
1 k
2
k
k
1 d
v m
i
J
J J q
e
+ q + =
= =
(9.29)
Pentru determinarea diagramei de sarcin la deplasarea mecanismului de translaie n gol,
rezistena mecanism la naintare, momentul de inerie i masa sunt determinate n absena sarcinii (Q =
0). Randamentul transmisiei este determinat funcie de coeficientul de ncrcare N= f(k).
Fig. 9.11 Diagrama de sarcin a mecanismului de translaie
t
1
t
01
t
2 t
02
t
s1
t
d1
t
p1
t
s2
t
d2
t
p2
M, M
s
[Nm]
v[m/s]
t[s]
M
1
=M
s1
M
d1
M
p1
v
s1
M
2
=M
s2 M
d2
M
p2
v
s2
S-ar putea să vă placă și
- Model DisertatieDocument46 paginiModel DisertatieAndrei Gul75% (4)
- Desen TehnicDocument133 paginiDesen TehnicIrene Andreea MineaÎncă nu există evaluări
- Exemplu CVDocument2 paginiExemplu CVLaurentiu Laur100% (1)
- Dictionar AUTODocument106 paginiDictionar AUTObogd32000100% (4)
- TCMDocument214 paginiTCMmamadraq100% (1)
- TCMDocument214 paginiTCMmamadraq100% (1)
- SM 7Document15 paginiSM 7Ionut AndreiÎncă nu există evaluări
- Curs SM-6Document23 paginiCurs SM-6Ionut AndreiÎncă nu există evaluări
- Cap 2 - Sistem-Ingineria Sistemelor D EproductieDocument29 paginiCap 2 - Sistem-Ingineria Sistemelor D Eproductiealexa_liviaÎncă nu există evaluări
- SM 4Document19 paginiSM 4Ionut AndreiÎncă nu există evaluări
- PNII - Idei 247-2007 - Prezentare ProiectDocument67 paginiPNII - Idei 247-2007 - Prezentare ProiectIonut AndreiÎncă nu există evaluări
- SM 2 2Document14 paginiSM 2 2Ionut AndreiÎncă nu există evaluări
- SM 5Document8 paginiSM 5Ionut AndreiÎncă nu există evaluări
- SM 3Document24 paginiSM 3Ionut AndreiÎncă nu există evaluări
- SM 1Document15 paginiSM 1phimalayaÎncă nu există evaluări
- PNII - Idei 247-2007 - Prezentare Proiect RODocument108 paginiPNII - Idei 247-2007 - Prezentare Proiect ROIonut AndreiÎncă nu există evaluări
- Cap 1Document12 paginiCap 1abnicolescuÎncă nu există evaluări
- Ppppa Curs 8 2011Document14 paginiPpppa Curs 8 2011Ionut AndreiÎncă nu există evaluări
- Motor VibroDocument15 paginiMotor VibroSara HeartÎncă nu există evaluări
- Fluajul MetalelorDocument27 paginiFluajul MetalelorIonut AndreiÎncă nu există evaluări
- Arborele CotitDocument6 paginiArborele CotitIonut AndreiÎncă nu există evaluări
- Ppppa Curs 2 2011Document10 paginiPpppa Curs 2 2011Ionut AndreiÎncă nu există evaluări
- Model de Traseul TehnologicDocument5 paginiModel de Traseul TehnologicIonut AndreiÎncă nu există evaluări
- Model de Traseul TehnologicDocument5 paginiModel de Traseul TehnologicIonut AndreiÎncă nu există evaluări
- Ppppa Curs 1 2011Document11 paginiPpppa Curs 1 2011Ionut AndreiÎncă nu există evaluări
- Ppppa Curs 1 2011Document11 paginiPpppa Curs 1 2011Ionut AndreiÎncă nu există evaluări
- Ppppa Curs 1 2011Document11 paginiPpppa Curs 1 2011Ionut AndreiÎncă nu există evaluări
- Analiza AvariilorDocument6 paginiAnaliza AvariilorIonut AndreiÎncă nu există evaluări
- Ppppa Curs 2 2011Document10 paginiPpppa Curs 2 2011Ionut AndreiÎncă nu există evaluări