S-ar putea să vă placă și
- D.A.L.I.: Domeniu de VerificareDocument1 paginăD.A.L.I.: Domeniu de VerificareFlorin FlorinellÎncă nu există evaluări
- Debitmetru KoleosDocument2 paginiDebitmetru Koleosionut prodanÎncă nu există evaluări
- Grafic ResponsabiliDocument3 paginiGrafic ResponsabiliДенис ПримакÎncă nu există evaluări
- Lectia 1Document1 paginăLectia 1MoldoJohn91Încă nu există evaluări
- MyBand RBD - RebeldeDocument48 paginiMyBand RBD - RebeldeReviste onlineÎncă nu există evaluări
- Grad de Atractivitate Baile HerculaneDocument14 paginiGrad de Atractivitate Baile HerculaneDaniel DincăÎncă nu există evaluări
- 3 Exercitii Pentru Chitara PDFDocument2 pagini3 Exercitii Pentru Chitara PDFforum2011Încă nu există evaluări
- 3 Exercitii Pentru Chitara PDFDocument2 pagini3 Exercitii Pentru Chitara PDFOana NourÎncă nu există evaluări
- Grafic Retea MPM .... A3 - 6Document1 paginăGrafic Retea MPM .... A3 - 6Bianca DinuÎncă nu există evaluări
- Liceul Teoretic M.Sadoveanu", Or. OcnițaDocument5 paginiLiceul Teoretic M.Sadoveanu", Or. OcnițaМихаил ЖалбэÎncă nu există evaluări
- 19.15 Centralizatorul Activitatii SpitaluluiDocument2 pagini19.15 Centralizatorul Activitatii SpitaluluiSimonaÎncă nu există evaluări
- Exercitii PLCDocument22 paginiExercitii PLCplacintaru0% (1)
- Regulament de Ordine Interioara Pro Scientia 2018Document90 paginiRegulament de Ordine Interioara Pro Scientia 2018Nicolae RoxanaÎncă nu există evaluări
- Camasuire Grinzi PDFDocument1 paginăCamasuire Grinzi PDFSandu MariaÎncă nu există evaluări
- ES 4 CL A V-ADocument3 paginiES 4 CL A V-AМихаил ЖалбэÎncă nu există evaluări
- 32 Modificări - BroderieDocument3 pagini32 Modificări - BroderieIrina CÎncă nu există evaluări
- 010 Recunoaște Numerele Si Coloreaza Fisa de Lucru PDFDocument1 pagină010 Recunoaște Numerele Si Coloreaza Fisa de Lucru PDFmona mihaiÎncă nu există evaluări
- MTC 32 - Final11.08.2009Document20 paginiMTC 32 - Final11.08.2009catalinpascariuÎncă nu există evaluări
- Curs Tehnici de Excavare Si HaldareDocument31 paginiCurs Tehnici de Excavare Si HaldareCristi CioraÎncă nu există evaluări
- IET008 - Schema Monofilara TEB-01Document1 paginăIET008 - Schema Monofilara TEB-01Relu GarbanÎncă nu există evaluări
- Exerciţii Cu Radicali PDFDocument1 paginăExerciţii Cu Radicali PDFGabriela GrigoreÎncă nu există evaluări
- Exerciţii Cu RadicaliDocument1 paginăExerciţii Cu RadicaliAlexandru BurceaÎncă nu există evaluări
- Exerciţii Cu RadicaliDocument1 paginăExerciţii Cu RadicaliMaria MunteanuÎncă nu există evaluări
- Coloreaza Dupa NumereDocument1 paginăColoreaza Dupa Numeredobre petrutaÎncă nu există evaluări
- Coloreaza Dupa Numere PDFDocument1 paginăColoreaza Dupa Numere PDFdobre petrutaÎncă nu există evaluări
- 2.2.3. Piese Desenate PDFDocument22 pagini2.2.3. Piese Desenate PDFVlad CiubotaruÎncă nu există evaluări
- SRTS-2003 A3Document1 paginăSRTS-2003 A3Ioana A. ComanÎncă nu există evaluări
- Fisa TrigonometriaDocument9 paginiFisa TrigonometriaDeák ÉvaÎncă nu există evaluări
- G.barbu Tehnologia Turnării CursDocument138 paginiG.barbu Tehnologia Turnării CursVartolomei Stefan-DragomirÎncă nu există evaluări
- Centralizare Raspunsuri ChestionarDocument12 paginiCentralizare Raspunsuri ChestionarНаташа МотрукÎncă nu există evaluări
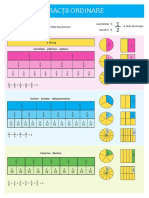
- 0 Plansa Fractii OrdinareDocument1 pagină0 Plansa Fractii Ordinaresoonrie100% (2)
- Evaluare Initiala CL XDocument5 paginiEvaluare Initiala CL Xmariaivasenco25Încă nu există evaluări
- Rezervare - TUNETE - IticketDocument1 paginăRezervare - TUNETE - IticketVictoria MartinencoÎncă nu există evaluări
- ES Nr.5 Ecuatii, InecuatiiDocument6 paginiES Nr.5 Ecuatii, InecuatiiTatiana GutiumÎncă nu există evaluări
- Manual de Utilizare Aparat de Vopsit Wagner Control Series Pro 250 RDocument20 paginiManual de Utilizare Aparat de Vopsit Wagner Control Series Pro 250 RRaluca RaluÎncă nu există evaluări
- 3 OrtopantomogramaDocument34 pagini3 OrtopantomogramaCosminÎncă nu există evaluări
- 1 Canto+Im PRTST 2023 (Rom)Document6 pagini1 Canto+Im PRTST 2023 (Rom)irinaÎncă nu există evaluări
- 1 Radicali PDFDocument2 pagini1 Radicali PDFPricope LilianaÎncă nu există evaluări
- Factorii Geografici Care Influentraza Dezvoltarea EcosistemulDocument22 paginiFactorii Geografici Care Influentraza Dezvoltarea EcosistemulOlesea CojocaruÎncă nu există evaluări
- Planificator Săptămânal Cu 7 ObiceiuriDocument1 paginăPlanificator Săptămânal Cu 7 ObiceiuriScribdTranslationsÎncă nu există evaluări
- 12 Mat Test Ro U sb12Document5 pagini12 Mat Test Ro U sb12Тофан НиколайÎncă nu există evaluări
- Evaluare Sumativă - Numere Reale - Clasa 10Document6 paginiEvaluare Sumativă - Numere Reale - Clasa 10Aliona Beșliu100% (1)
- Valori - Foaie RaspunsDocument2 paginiValori - Foaie RaspunsAlexandra CiocîrlanÎncă nu există evaluări
- Fundatii 1Document1 paginăFundatii 1Nicolae BalicaÎncă nu există evaluări
- Curs 7-8 BPDPDocument13 paginiCurs 7-8 BPDPToth LoriÎncă nu există evaluări
- Puteri Cu Exponent IntregDocument2 paginiPuteri Cu Exponent IntregVadyk PrepÎncă nu există evaluări
- MatemaDocument6 paginiMatemaCristina LupascoÎncă nu există evaluări
- Ro1 Mem 1666245658 Toamna Desene de Colorat Dupa Codul Numerelor - Ver - 1Document5 paginiRo1 Mem 1666245658 Toamna Desene de Colorat Dupa Codul Numerelor - Ver - 1Dicu MadalinaÎncă nu există evaluări
- Ev Form Fractii CESDocument2 paginiEv Form Fractii CESLarisa VieruÎncă nu există evaluări
- ChOrg 6 CicloalcaniDocument15 paginiChOrg 6 CicloalcaniDanaÎncă nu există evaluări
- Analiza Pietei-Planificare CalendaristicaDocument15 paginiAnaliza Pietei-Planificare Calendaristicapuls_geny3405Încă nu există evaluări
- 20 Teste de Antrenament Tip BAC Mate-Info 2020 - BaremeDocument21 pagini20 Teste de Antrenament Tip BAC Mate-Info 2020 - BaremeDavidNeaguÎncă nu există evaluări
- Linii Utilizate În Desenul TehnicDocument6 paginiLinii Utilizate În Desenul TehnicLuminita PopescuÎncă nu există evaluări
- UntitledDocument10 paginiUntitledBestPrint ExpertÎncă nu există evaluări
- Dec 59 Coofana Colecionar - Coloreaz Pe Numere - Ver - 1Document3 paginiDec 59 Coofana Colecionar - Coloreaz Pe Numere - Ver - 1Elena CrisÎncă nu există evaluări
- 12 Mat Test2 U Ro Es23Document7 pagini12 Mat Test2 U Ro Es23Gimnaziul CornestiÎncă nu există evaluări
- Es 10a. 2022 - 1Document2 paginiEs 10a. 2022 - 1Mihail JalbăÎncă nu există evaluări
- Test AnualDocument7 paginiTest AnualMaria AndreiÎncă nu există evaluări