Documente Academic
Documente Profesional
Documente Cultură
ASC 2 Tipuri de Arhitecturi SUBLINIAT
Încărcat de
Mops LightDrepturi de autor
Formate disponibile
Partajați acest document
Partajați sau inserați document
Vi se pare util acest document?
Este necorespunzător acest conținut?
Raportați acest documentDrepturi de autor:
Formate disponibile
ASC 2 Tipuri de Arhitecturi SUBLINIAT
Încărcat de
Mops LightDrepturi de autor:
Formate disponibile
2.
TIPURI DE ARHITECTURI
2.1. Clasificarea arhitecturii sistemelor de calcul
2.1.1. Clasificarea Flynn
Clasificarea Flynn se face dup gradul de multiplicitate al sirurilor formate
din secvente de instructiuni si secvente de date care pot fi tratate simultan din punct
de vedere hardware. Prin secven de date se ntelege un sir de date de intrare,
rezultate partiale sau rezultate temporare care sunt apelate de ctre o secven de
instruciuni.
Conform acestei clasificri exist patru tipuri de arhitecturi:
SISD (Single Instruction Stream Single Data Stream);
SIMD (Single Instruction Stream Multiple Data Stream);
MISD (Multiple Instruction Stream Single Data Stream);
MIMD (Multiple Instruction Stream Multiple Data Stream).
Pentru aceste arhitecturi exist trei tipuri de componente de sistem: UC
(unitatea central), UP (unitatea de prelucrare) si MM (modulul de memorie).
Desi sunt diferite ntre ele, toate schemele urmtoare respect succesiunea
evenimentelor din arhitectura Von Neumann: instructiunile si datele sunt extrase
din memorie, instructiunile sunt decodate de UC care trimite secventa de
instructiuni ctre UP pentru executie, datele circul ntre memorie si procesor pe o
cale bidirectional.
n continuare se va nota sirul de date cu SD si cel de instructiuni cu SI.
2.1.1.1. Arhitectura SISD
Fig. 2.1. Structura arhitecturii SISD.
Caracteristici:
instructiunile sunt executate serial, ns pot exista suprapuneri n
executie (pipeline). Majoritatea structurilor SISD rmase astzi n uz
folosesc structuri pipeline.
ARHITECTURA SISTEMELOR DE CALCUL
20
un calculator cu structur SISD poate avea mai multe elemente de
prelucrare (funcii definite), toate gsindu-se sub supervizarea aceleiasi
unice UC.
Exemple: IBM 7090, VAX 11/780, CDC 6600, IBM 360/91, CRAY.
Limitrile arhitecturii SI SD
La acest tip de arhitecturi, viteza calculatorului este determinat de perioada
ceasului. Dac perioada ceasului scade, calculatorul devine n consecint mai rapid.
Pentru a obtine un ceas mai rapid exist dou posibilitti:
calea de semnal s fie mai scurt;
tranzistorii folositi s fie mai rapizi.
Din nefericire, se pare c ambele au atins o anumit limitare din punct de
vedere tehnologic.
Scurtarea cii de semnal ar costa foarte mult. Cresterea numrului de
tranzistori pe unitatea de arie ar duce la cresterea dramatic a cldurii disipate n
exterior. Sistemele suplimentare de rcire ar costa si ele foarte mult.
Se lucreaz n prezent la fabricarea unor cipuri de joas putere (Low Power
Chips) care ar duce la scderea cldurii generate. Aceasta se poate realiza prin
mentinerea constant a densittii de energie n timp ce numrul de tranzistori pe
unitatea de arie a cipurilor ar creste.
Realizarea de tranzistori mai rapizi este, de asemenea, foarte costisitoare. n
acest scop se lucreaz la scderea rezistentei firelor prin care trece curentul.
Aluminiul este elementul folosit n 1998, dar recent s-a reusit constructia unui cip
cu fire din cupru. Concomitent cu scderea rezistentei firelor se lucreaz si la
mbunttirea izolatiei dintre fire.
Este evident c perioada ceasului nu poate fi fcut egal cu 0. n consecint,
modul secvential de tratare a operatiilor impus de arhitectura von Neumann
distruge orice sperant ntr-o viitoare crestere a vitezei calculatoarelor. Aceast
situatie este cunoscut sub denumirea de gtul sticlei lui Neumann (Neumann
Bottleneck). Pentru a sparge aceast limitare, trebuie introdus o arhitectur de tip
neserial. Alternativa este reprezentat de arhitecturile de calcul paralele.
2.1.1.2. Arhitectura SIMD
Caracteristici:
exist mai multe UP datorit sirului de date multiplu, preluat din memoria
partajat (memoria mprtit n mai multe memorii);
corespunde matricelor de microprocesoare: UP identice si supervizate de
o singur UC;
toate UP primesc instructiunile (setul unic de instructiuni) care actioneaz
asupra unor seturi de date diferite, provenite din siruri diferite de date
SD1, ..., SDn;
masinile SIMD pot efectua dou tipuri de prelucrri: pe cuvnt (word-
slice) si pe bit (bit-slice).
Tipuri de arhitecturi
21
Fig. 2.2. Structura arhitecturii SIMD.
Aceste tipuri de masini lucreaz foarte bine pe seturi de date formate de
matrice de dimensiuni foarte mari atunci cnd este necesar s se execute asupra lor
aceeasi operatie. Masinile SIMD sunt eficiente si n cazul procesrii retelelor neurale.
Exemplu: CM (Connection Machine) fabricat de Thinking Machines
Company din Cambridge (Massachusetts).
Limitrile arhitecturii SI MD
Aceste tipuri de masini sunt destul de scumpe n ceea ce priveste costurile de
productie, deoarece bancurile de procesoare nu sunt componente standard. Chiar
dac numrul celor care au nevoie de astfel de masini este n continu crestere,
acestia nu sunt destul de numerosi pentru a justifica existenta unor fabrici dedicate
exclusiv productiei de SIMD-uri. n consecint, aceste masini sunt n general
Icute la comand si cost foarte mult.
1.4.1.3. Arhitectura MISD
Desi aceast masin este posibil de realizat din punct de vedere teoretic, nu a
fost niciodat fabricat n scop comercial. A fost construit n laboratoare de
cercetare, dar nu au existat clienti dornici s investeasc ntr-o astfel de arhitectur,
deoarece nu se adreseaz nici uneia dintre aplicatiile de baz.
Fig. 2.3. Structura arhitecturii MISD.
Caracteristici:
fiecare UC lucreaz cu sirul de instructiuni propriu SI1, ..., SIn;
fiecare UP lucreaz cu acelasi sir de date, care suport mai multe prelucrri;
partajare pe orizontal (un singur sir de date, mai multe siruri de instructiuni);
ARHITECTURA SISTEMELOR DE CALCUL
22
iesirea de la UP1 devine intrare pentru UP2 s.a.m.d.
Structura se numeste macro-pipeline (are doar o valoare teoretic).
2.1.1.3. Arhitectura MIMD
Aceste tipuri de calculatoare sunt cunoscute sub denumirea de
multiprocesoare, chiar dac si masinile SIMD sunt tot multiprocesor. n
calculatoarele MIMD paralelismul este realizat prin lansarea n executie a mai
multor instructiuni n acelasi timp pe diferite seturi de date. Este evident c sunt
necesare elemente aditionale de control pentru a trimite instructiunea corect si
data care trebuie la procesorul ales, toate n acelasi timp. Cele mai multe sisteme
multiprocesor intr n aceast clas.
Fig. 2.4. Structura arhitecturii MIMD.
Avantajele arhitecturii MIMD sunt:
vitez mare de prelucrare, dac prelucrarea poate fi descompus n fire
paralele, toate procesoarele prelucrnd simultan;
ntruct procesoarele si blocurile de memorie sunt resurse de tip general,
defectarea unei unitti se poate compensa prin alocarea sarcinii de
prelucrare altei unitti (grad ridicat de tolerant la defectri);
se poate utiliza reconfigurarea dinamic pentru a face fat gradelor
variabile de ncrcare a procesoarelor.
Exemple de sisteme MIMD: C.mmp, Cm* (Carnegie Mellon University),
Ultracomputer (New York University), Cedar (University of Illinois), BBN
Butterfly, Alliant FX, CM-5 (Thinking Machine Corporation), seria Intel iPSc etc.
Sistemele MIMD se mai numesc intrinseci (propriu-zise) dac au UP
interactive: toate sirurile de date provin din acelasi spatiu de memorie adresat de
cele n procesoare (dac nu se ntmpl acest lucru spatii disjuncte ale memoriei
se spune c exist un set de n sisteme SISD independente).
Cele dou tipuri de sisteme prezentate mai sus se mai numesc shared
memory (memoria este accesat de toate procesoarele) si shared nothing (fiecare
procesor are propria memorie, propriul disc si propriul sistem de comunicatii).
Dac la un sistem MIMD intrinsec interactiunea ntre microprocesoare este
puternic, sistemul se numeste cu cuplaj strns. Legtura procesor memorie se
face prin intermediul unor magistrale de interconectare. Comunicatia si sincronizarea
ntre procesoare se realizeaz prin zone comune de memorie. Avantaj: comoditate
de programare oferit de spatiul comun de adrese (shared address space).
Tipuri de arhitecturi
23
n caz contrar, sistemul se numeste cu cuplaj slab. Legtura procesor
memorie se face prin conexiuni seriale punct-la-punct (de tip retea). Comunicatia
ntre procesoare se face prin mesaje (message passing). Fiecare procesor dispune
de memorie proprie (private memory). Avantaj: scalabilitate (posibilitate comod
de expandare). Cele mai multe sisteme comerciale sunt cu cuplaj slab.
Exemple: IBM 370/168 cuplaj slab, CRAY 2 cuplaj strns.
2.1.1.4. Sisteme cu memorie partajat (shared memory)
n cazul masinilor cu memorie partajat, masina original von Neumann a
fost extins prin includerea a ceea ce se numeste memorie cache. Aceasta este o
memorie local atasat fiecrui procesor n parte, care i permite procesorului s
aib acces rapid la propriile seturi de instructiuni si date, dar s poat accesa n
continuare memoria principal prin magistrala de memorie. Acest tip de masin se
mai numeste arhitectur cu multiprocesare simetric si este prezentat n figura 2.5.
Fig. 2.5. Arhitectura sistemelor shared memory.
Dintre sistemele mai vechi, n aceast categorie se nscrie seria IBM
RS/6000: J40, J50, R40 si R50. Modelul J40 are dou nivele de cache n loc de
unul singur. n loc s foloseasc o magistral pentru a lega diferitele procesoare cu
memoria principal, IBM a dezvoltat un asa-numit crossbar care, spre deosebire de
magistrala conventional, permite pn la patru transferuri simultane cu memoria.
Limitrile arhitecturilor MI MD cu memorie partajat
Fig. 2.6. Limitrile calculatoarelor cu memorie partajat.
ARHITECTURA SISTEMELOR DE CALCUL
24
La aceste arhitecturi, gtul sticlei (bottleneck) l reprezint magistrala de
memorie. Toate instructiunile si datele fiecrui procesor trebuie s treac prin
aceast magistral. Cnd procesoarele care folosesc aceeasi memorie sunt putine,
performantele depind liniar de numrul procesoarelor. Pe msur ce acesta creste,
mrirea performantelor este din ce n ce mai slab, asa cum rezult din figura 2.6.
Exist dou tipuri de sisteme MIMD cu memorie partajat:
cu resurse globale (Global Shared Memory):
o arhitectura UMA (Uniform Memory Access);
o arhitectura UMA cu memorii cache locale;
cu resurse distribuite (Distributed Shared Memory):
o arhitectura NUMA (Non-Uniform Memory Access);
o arhitectura COMA (Cache-Only Memory Access);
o arhitectura CC-NUMA (Cache Coherent Non-Uniform Memory Access).
A. Arhitecturile GSM (Global Shared Memory)
Calculatoarele MIMD cu spatiu unic de memorie au un cost relativ sczut si din
acest motiv se bucur de o popularitate ridicat. Acestea sunt considerate a fi sisteme
cu cuplaj strns, datorit gradului ridicat de partajare a resurselor. Functionarea
ntregului sistem paralel este coordonat de ctre un singur sistem de operare, care
se ocup de planificarea n executie a proceselor pe procesoarele disponibile n
sistem, n conditiile n care se doreste o ncrcare ct mai echilibrat a acestora.
Arhitectura UMA (Uniform Memory Access)
Memoria fizic a calculatoarelor de tip UMA este compus din mai multe
blocuri care formeaz un spatiu unic de adresare. Procesoarele acceseaz blocurile
de memorie prin intermediul retelei de interconectare (vezi figura 2.7), care poate fi
static (format din conexiuni fixe, punct-la-punct, ntre nodurile retelei) sau
dinamic (format din conexiuni variabile n timp, de tip crossbar).
Fig. 2.7. Arhitectura UMA.
Principala caracteristic a calculatoarelor UMA este c toate procesoarele au
timp de acces egal la memoria partajat. ns, tocmai de aceea, numrul
procesoarelor utilizate n cadrul sistemului paralel nu poate fi foarte mare, deoarece
cresterea numrului de procesoare din sistem atrage dup sine o probabilitate mai
mare de conflict n ceea ce priveste accesarea concurent a aceleiasi zone de
memorie. ntr-un astfel de caz, se vor nregistra timpi de asteptare care vor conduce
la o utilizare ineficient a procesoarelor si la o ncrcare neechilibrat a acestora.
Tipuri de arhitecturi
25
n plus, pentru obtinerea unor performante deosebite, reteaua de comunicatie
va trebui s ofere o lrgime de band suficient de mare, deoarece fiecare procesor
poate necesita accesul la memoria partajat, ceea ce presupune transportul datelor
solicitate din memoria comun ctre procesorul care a formulat cererea.
Arhitectura UMA cu memorii cache locale
O mbunttire adus modelului UMA o reprezint utilizarea memoriilor
cache la nivelul elementelor de procesare (vezi figura 2.8). Fiecare procesor va
avea asociat o astfel de memorie. Atunci cnd un procesor solicit date, mai nti
se verific dac aceste date se gsesc deja n memoria cache local. n caz
afirmativ, acestea se transfer foarte rapid procesorului, fr a accesa memoria
partajat. Astfel, problema conflictelor de acces concurent la spatiul unic de
memorie se rezolv, cel putin, partial. Mult mai putine cereri vor ajunge s
acceseze memoria partajat si, din acest motiv, probabilitatea de aparitie a
conflictelor devine mult mai mic.
Fig. 2.8. Arhitectura UMA cu memorii cache locale.
Utilizarea memoriilor cache presupune ns si asigurarea consistentei
acestora. n momentul n care anumite date stocate n memoria global se modific,
aceste modificri trebuie s fie semnalate tuturor memoriilor cache care stocheaz
cpii ale datelor respective. Mai mult chiar, atunci cnd se schimb continutul
datelor de la nivelul unei memorii cache este nevoie ca modificrile s fie efectuate
n toate memoriile cache care contin cpii ale datelor actualizate. Mentinerea
coerentei memoriei cache se poate realiza att prin mecanisme software, ct si prin
mecanisme hardware. Modelele cu acces neuniform la memorie ncearc s evite
dezavantajele ntlnite la calculatoarele de tip UMA.
B. Arhitecturile DSM (Distributed Shared Memory)
Reprezint sisteme cu memorie partajat, dar care este distribuit din punct
de vedere fizic. Astfel, procesoarele au asociate memorii locale care formeaz
mpreun o memorie global care poate fi accesat direct de ctre toate elementele
de procesare. Timpul de acces la locatiile de memorie nu mai este uniform, el
depinznd de localizarea fizic a datelor care se doresc a fi transferate.
ARHITECTURA SISTEMELOR DE CALCUL
26
Arhitectura NUMA (Non-Uniform Memory Access)
n cazul acestui model, memoria partajat este distribuit fizic procesoarelor
din sistem (vezi figura 2.9). Astfel, fiecare element de procesare are asociat o
memorie local. Toate aceste memorii locale formeaz un spatiu unic de adres.
Din acest motiv, timpul de acces la memorie este neuniform, deoarece accesul la
datele aflate n memoria local este foarte rapid n timp ce accesul la datele aflate
n memoria local a altor elemente de procesare va fi mult mai lent, datorit
faptului c datele respective vor fi transportate prin reteaua de comunicatie.
Fig. 2.9. Arhitectura NUMA.
Observaie. Sistemele NUMA sunt foarte asemntoare sistemelor distribuite,
din moment ce fiecare procesor dispune de o memorie local, iar toate aceste
module locale formeaz un spatiu unic de adresare.
O caracteristic important pentru masinile NUMA este factorul NUMA.
Acest factor arat diferentele de latent pentru accesarea datelor din memoria
local comparativ cu accesarea dintr-o zon care nu este local. n functie de
conexiunile sistemului, factorul NUMA poate diferi pentru diverse prti ale
masinii: accesarea datelor dintr-un nod vecin este mai rapid dect accesarea
datelor dintr-un nod mai ndeprtat pentru care este necesar traversarea unui
numr mai mare de etaje crossbar. Asadar, atunci cnd este mentionat, factorul
NUMA se refer de obicei la cele mai ndeprtate dou procesoare ale unei retele.
Arhitectura COMA (Cache-Only Memory Access)
n cazul modelului COMA, spatiul global de adrese este format din memorii
cache locale fiecrui procesor. Atunci cnd un procesor are nevoie de anumite date,
acestea sunt mai nti aduse n memoria cache de ctre controlerul de memorie,
dup care acestea vor fi accesate foarte rapid (vezi figura 2.10).
Fig. 2.10. Arhitectura COMA.
Tipuri de arhitecturi
27
Observaie. Dispare conceptul de memorie global, controlerul de memorie
avnd responsabilitatea de a ncrca n memoriile cache locale datele ce urmeaz a
fi accesate de ctre procesoare. ncrcarea datelor presupune localizarea si
transportul acestora prin intermediul retelei de interconectare. Prin folosirea
memoriilor cache locale, probabilitatea ca un procesor s acceseze majoritar date
numai din memoria local creste foarte mult.
Totusi, folosirea memoriilor cache pe post de memorii locale atrage dup
sine si o serie de probleme. Atunci cnd se ncearc aducerea unui bloc de date
ntr-o memorie cache integral ocupat, apare necesitatea mutrii unui alt bloc de
date pentru a se crea spatiul necesar memorrii noului bloc care va fi accesat de
ctre procesor. ns, datorit faptului c nu mai exist o memorie global n care s
se scrie acest bloc, va fi nevoie ca datele continute s fie mutate n memoria cache
a unui alt procesor. Aceste date ns nu vor fi niciodat accesate de ctre procesorul
care foloseste memoria respectiv, ceea ce conduce la o scdere a eficientei de
utilizare a sistemului.
n plus, operatia de transfer a blocului de date dintr-o memorie cache n alta
este si ea consumatoare de timpi de procesare, din moment ce datele trebuie s
circule prin reteaua de interconectare. Acesti timpi morti atrag dup sine o utilizare
ineficient si o ncrcare neechilibrat a procesoarelor.
O alt problem o reprezint asigurarea coerentei memoriilor cache, n
contextul n care operatiile de mutare a blocurilor devin din ce n ce mai
complicate, atunci cnd numrul de procesoare din sistem este din ce n ce mai
mare. Controlerul de memorie trebuie s asigure gestiunea nu numai a datelor care
vor fi aduse n memoriile cache, ci si a blocurilor care au fost mutate dintr-o memorie
local n alta. Din aceste motive, arhitectura COMA este tot mai rar folosit.
Arhitectura CC-NUMA (Coherent Cache NUMA)
Modelul CC-NUMA combin modul n care este construit spatiul unic de
adres la calculatoarele de tip NUMA si la cele de tip COMA. Fiecare element de
procesare al unui calculator de tip CC-NUMA dispune att de o memorie local.
ct si de o memorie cache asociat (vezi figura 2.11).
Fig. 2.11. Arhitectura CC-NUMA.
ARHITECTURA SISTEMELOR DE CALCUL
28
Ca si n cazul modelului NUMA, accesul la datele stocate n memoria local
proprie este foarte rapid. Accesarea unor date aflate n memoria local a unui alt
procesor implic aducerea acestora n memoria local proprie. Transferul de date
folosind reteaua de comunicatie atrage dup sine ntrzieri, deoarece nu este la fel
de rapid precum accesarea memoriilor locale.
Existenta memoriilor cache are ca efect reducerea traficului prin reteaua de
comunicatie. Datele solicitate de ctre un procesor sunt mai nti cutate n
memoriile locale, dup care sunt aduse n memoria cache, n cazul n care acestea
se gsesc n memoria local a unui alt procesor. La accesrile ulterioare, se va
folosi copia datelor respective stocat n memoria cache, deci nu va mai fi nevoie
ca datele s fie din nou transferate prin reteaua de interconectare.
Utilizarea memoriile cache implic necesitatea implementrii unor
mecanisme software sau hardware care s asigure consistenta memoriilor cache. La
modificarea unor date aflate n memoria local a unui procesor, este nevoie s se
actualizeze toate copiile acestor date aflate n memoriile cache. Aceste mecanisme
care asigur coerenta memoriilor cache contribuie la cresterea traficului efectuat n
cadrul retelei de interconectare.
Arhitectura CC-NUMA este utilizat de o serie de supercalculatoare foarte
cunoscute: Bull NovaScale, HP Superdome si SGI Altix.
Dezavantajele arhitecturilor DSM
Principalul dezavantaj al arhitecturilor MIMD cu memorie distribuit si cu
spatiu individual de adresare (NUMA, COMA, CC-NUMA) l reprezint
ntrzierile care pot s apar atunci cnd un procesor doreste s acceseze date aflate
n memoria local a unui alt element de procesare. Aceste ntrzieri se datoreaz
faptului c procesorul respectiv va astepta ca datele solicitate s fie transportate n
memoria sa local. Pentru minimizarea timpilor de inactivitate, procesorul n cauz
poate efectua o comutare de procese, atunci cnd procesul activ este blocat n
asteptarea datelor solicitate. n general comutarea proceselor este o operatiune
complex, implicnd costuri importante, ce pot influenta performantele sistemului.
Eficienta operatiei de comutare poate fi substantial mbunttit prin
utilizarea firelor de executie (thread-uri). Un proces poate fi mprtit n mai multe
fire de executie, care comunic ntre ele prin accesul la spatiul de adres alocat
procesului, pe care l partajeaz. Din acest motiv, firele de executie reprezint un
mecanism eficient de exploatare a concurentei programelor.
Un fir de executie reprezint cea mai mic entitate de planificare n sistemele
bazate pe thread-uri. Comutarea ntre dou fire de executie care apartin aceluiasi
proces este o operatie foarte rapid, care nu atrage dup sine costuri suplimentare
semnificative. Astfel, procesul activ este suspendat pn n momentul n care datele
solicitate au fost aduse n memoria local. n acest timp, este executat un alt fir de
executie al aceluiasi proces. Aceast comutare ntre fire de executie apartinnd
aceluiasi proces conduce la scderea timpilor de inactivitate si, implicit, la cresterea
eficientei cu care este utilizat sistemul paralel.
Calculatoarele MIMD cu memorie distribuit se numesc multicalculatoare si
reprezint sisteme cu cuplaj slab, datorit gradului redus de partajare a resurselor.
Tipuri de arhitecturi
29
Principalul avantaj al acestor sisteme l reprezint scalabilitatea, adic,
posibilitatea extinderii prin conectarea unor noi procesoare. Cresterea numrului de
procesoare nu atrage dup sine probleme legate de accesul concurent la memorie,
deoarece majoritatea apelurilor sunt ctre memoria local. ns transferul de mesaje
presupune schimburi de date care pot aglomera reteaua. Transferul de date ntre
dou procesoare este o operatie mare consumatoare de timp. Din acest motiv,
performantele retelei de interconectare pot influenta n mod hotrtor eficienta cu
care este utilizat sistemul paralel. n plus, este foarte greu ca sarcina de calcul
distribuit procesoarelor s fie echilibrat. Sistemul de operare ruleaz n fiecare
nod si, din acest motiv, ntregul sistem poate fi vzut ca fiind format din statii de
lucru care comunic prin transfer de mesaje. Complexitatea acestor sisteme este
foarte mare, datorit faptului c ntr-un nod de procesare individual se poate gsi
un simplu procesor sau un ntreg sistem de tip UMA.
Exemple de arhitecturi MI MD cu memorie partajat
Din perspectiv istoric, masinile paralele cu memorie partajat sunt de trei
categorii: bazate pe magistral (Pentium SMP, nodul IBM SP), bazate pe directoare
de tip CC-NUMA (Origin 2000) si cu spatiu de adresare global (Cray T3D, T3E).
Masinile multiprocesor din anii '60 ai secolului trecut aveau structura din
figura 2.12.a. Capacitatea de memorare sau posibilitatea de comunicare I/O se
puteau ameliora prin adugarea de module de memorie si de dispozitive I/O.
Fig. 2.12. a. Arhitectura sistemelor multiprocesor. b. Arhitectura retelei crossbar (multistage).
Cresterea capacittii de procesare se putea realiza prin adugarea de
procesoare. Aprea deja necesitatea unei interconectri a modulelor de memorie, a
procesoarelor si a legturilor cu canalele I/O. Se foloseau retele multietajate de tip
crossbar sau multistage (vezi figura 2.12.b). Memoriile cache, marea lovitur a
anilor '70, au fost de natur a influenta puternic structurile de memorare. Sistemele
de memorie scalate prin adugarea de module suplimentare aveau nevoie de
capacitate, dar si de vitez ridicat. Memoria era o surs de strangulri (bottleneck).
Introducerea memoriilor cache a schimbat aproape radical datele problemei.
2.1.1.5. Sisteme f memorie partajat (shared nothing)
n acest caz, fiecare procesor are propria lui memorie. Aceste masini sunt
practic calculatoare independente legate ntr-o retea. Fiecare calculator se mai
numeste si nod (al retelei). Arhitectura shared nothing se mai numeste cu
multiprocesare asimetric si este prezentat n figura 2.13.
ARHITECTURA SISTEMELOR DE CALCUL
30
Fig. 2.13. Arhitectura sistemelor shared nothing.
Pentru ca aceste calculatoare s lucreze bine trebuie s existe un protocol
bun de transmitere a mesajelor ntre ele. Acest protocol trebuie s fie foarte rapid si
Ir erori. IBM foloseste n acest scop protocolul Message Passing Interface (MPI)
si mai multe ci redundante care formeaz un switch de mare vitez.
Aceste noduri sunt conectate si printr-o retea conventional Ethernet din
motive de management al sistemului.
2.1.2. Clasificarea Wang
Criteriul de clasificare este n acest caz gradul de paralelism n procesarea
cuvintelor, respectiv bitilor de date. Datele pot fi configurate ntr-o matrice (vezi
figura 2.14).
Se noteaz cu n lungimea unui cuvnt si cu m numrul de cuvinte procesate
la un moment dat.
Fig. 2.14. Organizarea datelor ntr-o matrice.
Conform acestei clasificri, exist patru tipuri de arhitecturi:
WSBS (Word Serial Bit Serial). Se lucreaz pe un singur cuvnt,
fiecare cuvnt fiind prelucrat bit cu bit: n = 1, m = 1;
WSBP (Word Serial Bit Parallel): n > 1, m = 1;
WPBS (Word Parallel Bit Serial): n = 1, m > 1;
WPBP (Word Parallel Bit Parallel): n > 1, m > 1.
n cazul tipului WPBP, structura paralel este complet, corespunztoare
prelucrrii pe matrice m n.
n cazul tipului WSBP, prelucrarea este pe orizontal, iar n cazul tipului
WPBS, prelucrarea este pe vertical.
Tipuri de arhitecturi
31
2.2. Structura fizic a unui calculator secvenial
Calculatorul numeric sistem fizic, care prelucreaz automat informatia
codificat sub form de valori discrete, conform unui program, ce indic o
succesiune determinat de operatii aritmetice si logice. Sistemul de calcul este
compus din dou subsisteme principale:
subsistemul hardware (echipamente fizice componente);
subsistemul software (programele si structurile de date).
Structura de baz a calculatorului secvential, cu program memorat, stabilit
de von Neumann n 1945, este reprezentat n figura 2.15 si cuprinde cinci unitti
functionale: unitatea de intrare (UI), unitatea de memorare (M), unitatea de iesire
(UE), unitatea aritmetico-logic (UAL) si unitatea de comand (UCd).
Fig. 2.15. Masina von Neumann.
Linia continu reprezint fluxul de date si instructiuni, iar linia ntrerupt,
fluxul de comenzi si stri.
Unitatea de comand (UCda) controleaz activitatea tuturor componentelor
din sistem pe baza unei secvente de instructiuni, reprezentnd programul memorat.
Caracterul secvential al calculatorului rezult din modul de executie al
programului. Sunt necesare urmtoarele etape majore (vezi figura 2.16):
ncrcarea instructiunii IF (instruction fetch);
decodificarea instructiunii ID (instruction decoding);
ncrcarea (din memorie) a operanzilor OF (operand fetch);
executia operatiilor impuse de instructiune EX (execution).
Dup terminarea unei instructiuni, se trece la urmtoarea instructiune. Astfel,
programul este executat secvential, instructiune cu instructiune.
ARHITECTURA SISTEMELOR DE CALCUL
32
Fig. 2.16. Etapele executiei secventiale a unei instructiuni.
Unitatea aritmetico-logic (ALU) realizeaz prelucrarea informatiei preluate
din memorie, iar rezultatele se depun din nou n memorie sau sunt furnizate n
exterior. ALU realizeaz dou categorii de operatii:
aritmetice: adunare, scdere, nmultire, mprtire;
logice: SI, SAU, SAU-EXCLUSIV, NEGATIE.
Unitatea de comand, si cea aritmetico-logic, mpreun cu memoria,
formeaz unitatea central (UC sau CPU) a calculatorului.
Datele si programele sunt introduse n calculator prin intermediul unittii de
intrare, fiind apoi depuse n memorie.
2.2.1. Structuri de calculatoare paralele
Calculatoarele paralele se clasific n trei configuratii arhitecturale:
calculatoare pipeline (CPL);
calculatoare (procesoare) matriceale (CM);
calculatoare (sisteme) multiprocesor (CMP).
Un calculator pipeline utilizeaz paralelismul temporar. Procesoarele
matriceale se bazeaz pe mai multe unitti ALU sincronizate pentru a atinge
paralelismul spaial. Un sistem multiprocesor este caracterizat de paralelism
asincron, n sensul c setul de procesoare din structura sa interactioneaz si si
mpart resursele (memorii, baze de date). n acelasi timp, procesoarele matriceale
apeleaz la paralelism sincron (blocuri comandate printr-un unic semnal de ceas).
Cele patru tipuri de paralelism enuntate nu se exclud reciproc. Cele mai
multe dintre procesoarele actuale au structura intern bazat pe tehnologia pipeline
si multe dintre acestea pot fi organizate n sisteme matriceale sau multiprocesor.
Diferenta de baz dintre un procesor matriceal si un sistem multiprocesor este
aceea c unittile functionale din procesorul matriceal opereaz sincron, n timp ce
procesoarele sistemului multiprocesor functioneaz asincron. Tendintele indic
utilizarea calculatoarelor controlate prin flux de date cu procesoare algoritmice
VLSI. Aceste tipuri de calculatoare sunt caracterizate printr-o crestere masiv a
hardware-ului pentru a atinge paralelismul.
Tipuri de arhitecturi
33
2.2.1.1. Calculatoare pipeline
Executia unei instructiuni presupune patru faze majore: ncrcarea
instructiunii IF, decodarea instructiunii ID, ncrcarea operanzilor OF si
executia efectiv EX. n procesoarele non-pipeline, aceste faze se desfsoar
secvential, iar n procesoarele pipeline se desfsoar cu paralelism temporal.
Pentru procesoare complexe, faza de executie a instructiunii poate fi
partajat n suboperatii organizate dup principiul pipeline. Problemele care apar n
calculatoarele pipeline sunt datorate conflictelor de acces la memorie, salturilor si
ntreruperilor.
Datorit suprapunerii operatiilor, calculatoarele pipeline (CPL) sunt
optimizate pentru a efectua operatii de acelasi tip. Ori de cte ori se modific tipul
operatiei (instructiunii), registrele pipeline trebuie sterse si rencrcate si, ca
urmare, se consum timp suplimentar. Proiectarea CPL include: secventializarea
sarcinilor (task-urilor), prevenirea conflictelor de acces (coliziunilor), controlul
congestiei si controlul salturilor n program.
O schem functional a unui CPL este ilustrat n figura 2.17.
Fig. 2.17. Structura functional a unui calculator pipeline.
n schema de mai sus, exist dou structuri pipeline: una pentru date scalare
si una pentru date vectoriale. Faza de ncrcare a operatiilor este mprtit n dou
subfaze independente, corespunztoare operrii cu scalari sau cu vectori. Faza de
executie se desfsoar n dou procesoare distincte, asociate scalarilor sau
vectorilor.
ARHITECTURA SISTEMELOR DE CALCUL
34
Tehnica pipeline
Executia unei instructiuni este privit ca fiind alctuit din mai multe faze
(sau stagii), care se succed una dup alta si care pot fi tratate de unitti specializate,
ntr-un mod asemntor functionrii unei linii de asamblare (de ex.: de automobile).
Exemplu. Fie un sir de procese care are loc la executia unei instructiuni.
P1 1 2 3 4 5 6 7
P2 1 2 3 4 5 6
P3 1 2 3 4 5
P4 1 2 3 4
P5 1 2 3
t
Fig. 2.18. Exemplu de sir de procese la executia unei instructiuni si desfsurarea lor n timp.
Se presupune c de fiecare din aceste procese se ocup o unitate specializat.
Cnd se atinge al cincilea impuls de ceas, la toate cele cinci procese se lucreaz n
paralel; astfel se mreste de cinci ori viteza de executie. n faza ncadrat,
instructiunea 5 este n faza de ncrcare, instructiunea 4 n faza de decodare etc.
Problema este c n faza P5 poate s apar fenomenul de strangulare, pentru
c una sau mai multe instructiuni aflate ntre P1 si P5 pot s nu fie instructiuni utile
(de ex.: salt). Desi exist un paralelism n executia instructiunilor, aceasta este o
masin pipeline de tip SISD.
2.2.1.2. Calculatoare matriceale
Un procesor matriceal tipic este prezentat n figura 2.19. Exist dou unitti
functionale distincte: o unitate de control si sincronizare a elementelor de procesare
(care are ca sarcin suplimentar efectuarea operatiilor cu scalari) si o unitate de
prelucrare matriceal. Fiecare element de prelucrare (EP) reprezint un element
pasiv, adic, fr posibilitatea de a decodifica instructiuni.
ncrcarea instructiunilor si decodarea lor (fazele IF si ID) pentru unitatea de
prelucrare matriceal este efectuat de ctre unitatea de control, prin intermediul
unei retele de interconectare ntre EP. Fiecare element de prelucrare este alctuit
dintr-o unitate ALU, registre si memorie local, iar conexiunea dintre elemente este
realizat ntr-o arhitectur de tip NUMA.
Pentru o sesiune de lucru specific, unitatea de control stabileste functia
ALU pentru fiecare EP, dup care transfer operanzi din exterior ctre memoriile
locale ale EP si rezultatele de la un EP spre alt EP (utiliznd reteaua de
interconectare). Programarea CM este mult mai dificil dect programarea CPL.
Tipuri de arhitecturi
35
Fig. 2.19. Structura functional a unui calculator matriceal.
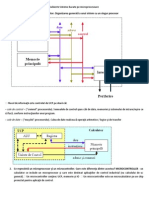
2.2.1.3. Calculatoare multiprocesor
Structur de baz a unui CMP este prezentat n figura 2.20.
Fig. 2.20. Calculator multiprocesor.
ARHITECTURA SISTEMELOR DE CALCUL
36
Notatiile din figura 2.20 sunt urmtoarele:
P1 Pn procesoare;
ML1 MLn memorii locale.
Sistemul este alctuit din mai multe procesoare care mpart resurse comune
(memorie), dar posed si resurse proprii (private), ntr-o arhitectur de tip UMA cu
memorii (cache) locale. Procesoarele functioneaz independent (asincron), dar
trebuie s comunice ntre ele.
Structura de interconectare ntre procesoare si ntre procesoare si resursele
comune determin organizarea sistemului multiprocesor. Exist trei mari categorii
de interconectri:
1. partajarea unei magistrale comune (bus);
2. utilizarea unei retele de interconectare total (crossbar);
3. utilizarea unei memorii multiport (ca memorie comun, dual).
CMP pot fi centralizate sau distribuite. Sistemele centralizate contin toate
procesoarele n acelasi sistem de calcul, spre deosebire de sistemele distribuite, n
care procesoarele pot fi fizic plasate n subsisteme diferite. Pentru sistemele
distribuite este necesar o retea de comunicatie rapid, flexibil (adaptabil) si
fiabil.
2.2.2. Mecanisme de prelucrare paralel
Aceste solutii de implementare a prelucrrii paralele sunt corelate cu
arhitecturile clasificrii Flynn n privinta solutiilor hardware, solutiile software
fiind specifice sistemelor de operare care gestioneaz intervalele de timp alocate
diferitelor aplicatii si speculnd, astfel, posibilitatea prelucrrilor paralele.
2.2.2.1. Soluii hardware de prelucrare paralel
Multiplicarea i specializarea unitilor aritmetico-logice(ALU)
Procesoarele clasice aveau o singur unitate de tip ALU. n acest fel, nu se
efectua dect o singur operatie la un moment dat. Prin multiplicarea ALU,
majoritatea functiilor pot fi distribuite ntre unittile specializate pe o anumit
functie aritmetic sau logic si pot functiona n paralel. n unele procesoare exist
dou ALU care pot lucra n paralel (o unitate pentru aritmetica n virgul fix si
alta pentru aritmetica n virgul mobil). Ideea specializrii functionale si a
distribuirii si multiplicrii ALU (numite si unitti functionale) poate fi extins att
la sistemele multiprocesor, ct si la cele matriceale. Acest mecanism constituie, de
fapt, implementarea paralelismului la sistemele SISD.
n figura 2.21 se prezint un exemplu de schem pentru figurarea acestei
solutii. Unitatea central contine 5 unitti ALU specializate pe diferite operatii,
care pot lucra n paralel.
n timp ce o instructiune este executat de o anumit unitate ALU, unitatea
de comand ncarc si decodific o alt instructiune pe care o ncredinteaz unei
alte unitti ALU s.a.m.d.
Tipuri de arhitecturi
37
Fig. 2.21. Multiplicarea ALU prin specializarea pe operatii.
Sistemul este eficient dac timpul de executie de ctre ALU a unei operatii
este mult mai mare dect timpul de ncrcare si decodificare a unei instructiuni.
Aceast conditie este, n general, ndeplinit.
Exprimarea algebric a conditiei de eficient pentru multiplicarea si
specializarea ALU este:
t
EX(ALU)
>> t
IF
+ t
ID
.
Paralelism i structur pipeline n CPU
Primele generatii de microprocesoare utilizau ALU (n special, sumatoare)
care operau cu flux de biti (serial).
Introducerea unui ALU care opereaz n paralel, pe flux de 8, 16, 32 sau 64
biti simultan (cu sumatoare, cu transport anticipat sau multiplicatoare matriceale)
duce la cresterea vitezei de prelucrare.
Arhitectura superscalar
n arhitectura superscalar, siruri de instructiuni diferite (de obicei dou,
eventual mai multe), utilizeaz resurse diferite n aceleasi stadii de executie a
instructiunilor de pe fiecare sir.
Un exemplu particular de arhitectur superscalar este prezentat n figura 2.22.
ARHITECTURA SISTEMELOR DE CALCUL
38
Fig. 2.22. Arhitectura superscalar.
Structura superscalar cu tehnic de burst (citire n rafale) este folosit
ncepnd cu microprocesorul 80486 si este corelat cu momentul introducerii n
capsula procesorului a memoriei cache de nivel 1.
Tehnica burst foloseste aceast memorie pentru a citi blocuri de instructiuni
din memoria cache, instructiuni care au fost ncrcate acolo din memoria principal
(MP) n mod secvential (vezi figura 2.23). n acest mod, se citesc dintr-o dat fie
dou, fie patru cuvinte, n functie de dimensiunea instructiunii (pe 32 sau 16 biti).
S-a folosit initial o magistral intern ntre cache si decodificatorul de instructiuni
de 64 biti, ajungndu-se n prezent la 128 de biti.
Fig. 2.23. Arhitectura superscalar cu tehnic de burst (citire n rafale).
Tipuri de arhitecturi
39
Exemplu. Schema din figura 2.24 reprezint o arhitectur superscalar cu
trei siruri de instructiuni diferite. Se execut n acelasi timp o operatie cu numere
reale si dou operatii cu numere ntregi. Fiecare unitate este de tip pipeline si poate
executa cteva operatii n diferite stagii pipeline.
Fig. 2.24. Exemplu de arhitectur superscalar cu trei unitti pipeline n paralel.
Arhitectura superpipeline
Se bazeaz pe divizarea stagiului pipeline n substagii si, deci, pe cresterea
numrul de instructiuni care sunt procesate de pipeline la un moment dat. Diviznd
fiecare stagiu n dou substagii, perioada ciclului de ceas t va fi redus la jumtate:
t/2.
La capacitate maxim, structura pipeline produce un rezultat la fiecare t/2
secunde. Pentru o arhitectur dat si setul de instructiuni aferent ei, exist un numr
optim de stagii pipeline. Dac numrul de stagii pipeline creste peste aceast limit,
se va reduce performanta global. O solutie pentru a creste viteza fr a face
compromisuri este arhitectura superscalar, prezentat anterior.
n figura 2.25, este prezentat un exemplu de executie pipeline (a),
superpipeline (b) si superscalar (c) a unei instructiuni.
Suprapunerea operaiilor CPU cu operaiile I /O
Utilizarea unor controlere I/O separate permite efectuarea n paralel a
operatiilor interne ale CPU cu operatii de transfer de date pe canalele I/O.
Exemple de controlere I/O:
controlere DMA (Direct Memory Access), care permit transferul direct de
date: memorie memorie sau memorie canale I/O, bazat pe principiul
cererii de magistral (aceasta reprezint una dintre tehnicile evoluate de
transfer de date, vezi paragraful 3.4.4.2);
procesoare specializate I/O, care lucreaz pe canale I/O cu sarcini specifice.
ARHITECTURA SISTEMELOR DE CALCUL
40
a
b
c
Fig. 2.25. Modul de operare al tehnicilor pipeline (a), superpipeline (b) si superscalar (c).
Unitate ALU vectorial
Fig. 2.26. Arhitectur SIMD cu unitate ALU vectorial.
Este o solutie de paralelism pentru sistemele SIMD, prezentat n figura 2.26.
Tipuri de arhitecturi
41
Utilizarea unui sistem ierarhizat de memorie
Memoria unui sistem de calcul trebuie s satisfac mai multe cerinte, adesea
contradictorii: capacitate mare, timp de acces mic, cost rezonabil si dimensiuni
reduse. Aceste cerinte nu pot fi ndeplinite simultan de un singur tip de memorie.
Cu tehnologia actual se pot realiza memorii de mare vitez, dar de capacitate mic
(RAM static), memorii de capacitate mare, dar de vitez medie (variante de
memorii DRAM) sau memorii de capacitate foarte mare, dar cu timp de acces
ridicat (memorii externe pe suport magnetic sau optic).
n sistemele de calcul performante, spatiul de memorare este ierarhizat pe
mai multe nivele, cu scopul de a beneficia de avantajele oferite de diverse tipuri de
memorii. Un sistem de calcul cu memorie organizat ierarhizat poate echilibra
diferentele de vitez ntre componentele sistemului (CPU, memorie, discuri) .
ntr-o astfel de arhitectur, memoria este organizat pe patru niveluri:
registrele CPU;
memoria cache (MC);
memoria principal sau operativ (MP);
memoria virtual (MV).
Registrele CPU sunt direct adresabile de ctre ALU.
Memoria cache (rapid) este cea mai apropiat de CPU, ceea ce impune ca
timpul de acces s fie mic, capacitatea fiind limitat. Aici sunt pstrate instructiunile
si datele cu probabilitatea cea mai mare de a fi utilizate ntr-o proximitate de timp.
Memoria cache reprezint un tampon ntre memoria principal si CPU.
Memoria principal sau operativ pstreaz programele si datele aferente
n curs de executie. Ea poate fi adresat n mod aleatoriu de un program utilizator.
Are o capacitate medie-mare si un timp de acces mediu. Este un tampon ntre
memoria virtual si CPU.
Memoria virtual este un concept arhitectural prin care memoria operativ
este extins peste spatiul de adresare al memoriei externe (hard disk, band
magnetic). Prin tehnicile de implementare, numite segmentare si paginare (vezi
capitolul 6), se urmresc dou aspecte esentiale:
cresterea resurselor de memorare disponibile pentru programele utilizator;
protejarea zonelor de memorie alocate modulelor de program.
Memoria virtual este util n cazul sistemelor de operare multitasking si
multiuser (Windows, Unix).
n general, tehnicile de implementare a MC si a MV sunt transparente pentru
programele utilizator. Aparent, programele de aplicatie lucreaz numai cu memoria
principal. Transferul de informatii ntre diferitele nivele de memorie se realizeaz
n mod automat, fie de ctre componente hardware specializate (unitatea de gestiune
a memoriei, MMU), fie de ctre sistemul de operare. Procesoarele recente ofer
suport hardware pentru implementarea memoriei cache si a memoriei virtuale.
Eficienta utilizrii unei arhitecturi ierarhizate de memorie se bazeaz pe
cteva principii legate de modul de utilizare a informatiilor continute n memorie.
Astfel, conform principiului localizrii referinei, adresarea locatiilor de
memorie se realizeaz ntr-o secvent repetitiv. Exist o probabilitate mare ca o
ARHITECTURA SISTEMELOR DE CALCUL
42
locatie adresat de curnd s fie adresat si ntr-un timp imediat localizare
temporar si, similar, este previzibil ca si locatiile adiacente s fie accesate n
curnd localizare spaial. Principiile localizrii temporale si spatiale sunt o
consecint a modului uzual de executie a secventelor de program.
Exemple:
un program contine bucle care presupun executia repetitiv a aceleiasi
secvente de instructiuni;
executia instructiunilor este, n majoritatea cazurilor, secvential
(succesiunea n executie), exceptie fcnd instructiunile de salt;
secventa de program (procedura) utilizeaz repetitiv aceeasi variabil sau
adreseaz repetat elemente ale unei structuri de date (tablouri, nregistrri).
Concluzie. Statistic s-a constatat c pentru majoritatea programelor este
valabil urmtoarea regul: 90% din timpul afectat unui program este utilizat
pentru executia a numai 10% din codul acestuia. Pe baza acestor observatii,
informatiile pot fi amplasate n mod dinamic pe diferite niveluri ierarhice ale
memoriei, n functie de probabilitatea de a fi utilizate.
2.2.2.2. Soluii software de prelucrare paralel
Prelucrarea pe loturi
Prelucrarea pe loturi (batch processing) presupune formarea unui fisier cu
extensia .bat si lansarea lui. Procesele au loc succesiv, iar CPU (care execut
operatiile de calcul) nu este folosit n mod eficient.
Fig. 2.19. a. Prelucrarea pe loturi. b. Multiprogramarea.
Tipuri de arhitecturi
43
Exemplu. Fie trei procese paralele, P1, P2 si P3, fiecare fiind vzut n timp
ca o succesiune de trei etape: intrare (i), calcul (c), iesire (o) (vezi figura 2.27.a).
Multiprogramarea
n acelasi interval de timp pot exista mai multe programe (procese) active n
sistemul de calcul, concurnd pentru memorie, I/O si CPU. Totusi, unele programe
sunt orientate ctre calcule (utiliznd intens CPU), n timp ce altele sunt orientate
ctre citirea/scrierea dispozitivelor I/O. Se pot astfel organiza (intercala) cele dou
clase de programe pentru a obtine un timp de prelucrare global ct mai bun. n
figura 2.27.b, cstigul de timp este notat cu A.
Intercalarea programelor permite utilizarea mai eficient a resurselor
calculatorului prin suprapunerea operatiilor I/O cu operatiile CPU. Acest mod de
organizare este gestionat de sistemul de operare (programul de supervizare). Astfel,
multiprogramarea se poate defini ca intercalarea operatiilor CPU cu operatii I/O
pentru mai multe programe.
Observaii.
1. P1, P2 si P3 pot apartine aceluiasi program sau unor programe diferite.
2. n cadrul multiprogramrii, se poate ntmpla ca un proces cu prioritate
mare s ocupe CPU un timp ndelungat si n acest fel se mpiedic
executia altor procese. Neajunsul se poate nltura folosind un sistem de
operare cu divizare n timp.
Diviziunea n timp(time sharing)
Diviziunea n timp reprezint mprtirea timpului de executie al CPU ntre
toate procesele (task-urile) active din sistemul de calcul. Cuantele de timp alocate
fiecrui proces pot fi inegale de la un proces la altul. Viteza de prelucrare poate
creste astfel mai mult dect n cazul multiprogramrii (vezi cazul particular din
figura 2.28).
Fig. 2.28. Repartizarea n timp a desfsurrii proceselor (time sharing).
ARHITECTURA SISTEMELOR DE CALCUL
44
Procesul de calcul se mparte n mai multe etape. n functie de divizarea n
intervale de timp, se poate face ca procesele s se termine aproximativ n acelasi
interval de timp (nu exist un proces dominant).
Diviziunea n timp constituie o atributie a sistemului de operare (numit, n
acest caz, sistem de operare cu diviziune n timp). Utilizarea diviziunii n timp a
programelor (sau a proceselor) n sistemele uniprocesor creeaz conceptul de
procesor virtual.
Exemplu: sisteme de calcul cu un singur procesor si mai multe terminale.
Pentru subiectul uman, rspunsul unicului procesor este suficient de rapid astfel
nct s se considere c fiecare terminal opereaz independent, ca si cum ar poseda
el nsusi procesor (utilizatorul are impresia c lucreaz singur pe calculator).
Conceptul de diviziune n timp poate fi extins n mod similar la sistemele
multiprocesor.
Observaii.
1. n cazul multiprogramrii, procesele si termin faza de calcul (n CPU),
aprnd suprapunere doar ntre operatii CPU si operatii I/O.
2. n cazul diviziunii n timp, procesele nu si termin faza de calcul nainte
de a se executa alt proces; procesele pot fi intercalate, astfel nct s se
cstige timp de executie n raport cu multiprogramarea (suprapuneri ntre
operatii CPU si operatii I/O, respectiv ntre diferite operatii I/O).
Noiunea de multithreading
Termenul de multithreading reprezint un aspect important al proiectrii
software, care necesit atentie special n constructia sistemelor mari si, n deosebi,
atunci cnd se pune problema eficientei (exprimate n termeni de vitez a
sistemului) si a performantei (exprimate n termeni de corectitudine n functionare
a sistemului). Folosind adecvat instructiunile de multithreading, se pot realiza
aplicatii optimizate.
Fiecare aplicatie sau program care ruleaz pe sistemul de operare este un
proces alctuit din unul sau mai multe fire (thread-uri). Un thread este un set de
instructiuni sau o parte anume a aplicatiei, care se execut independent n cadrul
programului sau sistemului. Thread-urile sunt entitti responsabile cu multitasking-
ul n cadrul unei singure aplicatii. De obicei, sistemul de operare (SO) se ocup cu
programarea si executarea thread-urilor.
Multithreading-ul presupune executia n paralel a mai multor procese, pentru
a mbuntti eficienta sistemului. Thread-urile sunt implementate n situatiile n
care trebuie ndeplinite mai multe sarcini simultan.
Avantajele threading-ului sunt urmtoarele:
sarcinile care cer mai mult timp de executie pot fi rulate n background;
interfata aplicatiei poate fi realizat mai atrgtor si mai simplu de
utilizat (de ex.: dup apsarea unui buton se afiseaz o bar de progres);
viteza aplicatiei poate creste;
thread-urile pot fi folositoare n situatiile n care exist decalaje ntre
anumite evenimente, putndu-se astfel elibera anumite resurse care nu
sunt necesare la un moment dat.
Tipuri de arhitecturi
45
Modelele de threading suportate de sistemele win32 sunt:
1. Modelul thread-ului unic (Single Thread Model). Acest tip de thread
presupune rularea unui singur thread la un moment dat. Restul thread-urilor trebuie
s astepte. Principalul dezavantaj al acestui tip de thread l reprezint timpii lungi
de executie pentru sarcini mici. Corespunde din punct de vedere conceptual
prelucrrii pe loturi (batch processing).
2. Modelul Apartment Thread (Single Thread Apartment Model STA). n
acest model, pot exista mai multe thread-uri care se execut n cadrul aplicatiei. n
STA, fiecare thread este izolat ntr-un apartament separat n cadrul procesului.
Fiecare proces poate avea mai multe apartamente, care pot partaja date ntre ele. n
acest caz, aplicatia este rspunztoare pentru stabilirea duratei fiecrui thread din
cadrul fiecrui apartament. Toate cererile sunt ordonate folosind Windows Message
Queue, astfel nct un singur apartament poate fi accesat la un moment dat.
Avantajul acestui model fat de modelul thread-ului unic este c se pot procesa
simultan mai multe cereri ale utilizatorului. Totusi, nu este atins nc eficienta
maxim, deoarece sarcinile se vor executa una dup alta. Corespunde din punct de
vedere conceptual multiprogramrii.
3. Modelul Multithread Apartment (Free Thread Apartment Model FTA).
Modelul Multithread Apartment presupune existenta unui singur apartament. Nu
este nevoie de ordonare, deoarece toate thread-urile apartin aceluiasi apartament si
pot partaje resursele. Aceste aplicatii se execut mai rapid dect cele care
implementeaz modelul unic sau STA, deoarece sistemul este mai putin solicitat si
poate fi optimizat s elimine timpii morti. Corespunde din punct de vedere
conceptual diviziunii n timp (time sharing).Aceste tipuri de aplicatii sunt foarte
complexe, deoarece trebuie s se asigure c thread-urile nu acceseaz simultan
aceleasi resurse (principiul pipeline). Este, astfel, absolut necesar s se furnizeze un
sistem de blocare a resurselor. Acesta trebuie implementat cu atentie, deoarece
poate conduce la blocarea total a sistemului.
Prin natura si arhitectura sa, mediul de programare Microsoft .NET
Framework este un mediu de tip multithreading.
Evaluarea performanelor. Utiliznd de n ori mai multe resurse n paralel,
un algoritm nu va rula de n ori mai repede, datorit fenomenului de timp
suplimentar (overhead), indus prin aplicarea paralelismului. Acest timp
suplimentar apare din urmtoarele cauze:
interactiunea ntre procese (transmiterea rezultatelor intermediare sau
partiale) si sincronizarea proceselor;
inactivitatea temporar (idling), care nseamn c exist procese inactive
pe anumite perioade de timp, datorit ncrcrii inegale si a asteptrii
sincronizrii;
calculele suplimentare, care nu apar n formularea serial a algoritmului.
Parametrii de intrare care contribuie la calculul performantelor sunt:
timpul de executie secvential sau serial, T
S
(timpul msurat de la
nceputul si pn la sfrsitul executiei algoritmului pe un calculator
secvential);
ARHITECTURA SISTEMELOR DE CALCUL
46
timpul de executie paralel, T
P
(timpul msurat de la nceputul executiei
si pn la terminarea ultimului subtask paralel);
numrul de procesoare, p.
Cu ajutorul acestora, se pot calcula urmtorii parametri de iesire:
suprasarcina, T
O
(Total Parallel Overhead) = diferenta dintre timpul
total de lucru nsumat al tuturor procesoarelor si timpul necesar celui mai
rapid algoritm secvential;
accelerarea, S (Speedup) = raportul dintre timpul necesar rezolvrii unei
probleme pe un procesor si timpul necesar rezolvrii aceleiasi probleme
n paralel pe p procesoare identice;
eficienta utilizrii calculatorului paralel, E = S / p;
costul, C = T
P
p, care reflect timpul total de lucru nsumat al
procesoarelor.
2.3. Categorii de calculatoare
Calculatoarele pot fi grupate n 5 categorii, n functie de structur,
dimensiuni, vitez, putere de calcul si destinatie:
microcalculatoare (ex.: computerele Apple si toate modelele de PC);
minicalculatoare (ex.: serverele IBM, SGI, Sun Microsystems etc.);
superminicalculatoare (ex.: Norsk Data Nord, Interdata, DEC VAX etc.);
mainframe-uri;
supercalculatoare.
2.3.1. Mainframe-uri
Un mainframe este un computer mare, folosit de institutii guvernamentale si
companii pentru procesarea datelor importante n statistic, recensminte, cercetare
si dezvoltare, proiectare, prognoz, planificarea productiei, tranzactii financiare etc.
Ca aspect exterior, primele mainframe-uri artau ca niste dulapuri uriase de metal.
Cu trecerea anilor, tehnologiile de fabricatie s-au dezvoltat, mrimea fizic a
mainframe-urilor a sczut, iar viteza lor de calcul a crescut foarte mult.
La nivelul anului 2008, prin mainframe se ntelege un calculator compatibil
cu modelele de tip IBM System/360 (1965). Actualmente, cel mai modern model
de la IBM este System z10. Sunt considerate mainframe-uri calculatoarele actuale
de tip: Nova (Fujitsu-Siemens), DPS (Groupe Bull), NonStop (Hewlett-Packard),
ClearPath (Unisys) si cele compatibile IBM System z9 (Hitachi, Platform Solutions).
Un mainframe poate rula sau gzdui mai multe sisteme de operare simultan,
functionnd ca mai multe masini virtuale. Un mainframe poate nlocui astfel chiar
si cteva sute de servere de dimensiuni mici (de exemplu, n aplicatii web),
reducnd costurile de ntretinere, dar mentinnd un nivel ridicat de sigurant.
Tipuri de arhitecturi
47
2.3.2. Supercalculatoare
Un supercalculator este un calculator complex cu destinatie special, compus
din mai multe procesoare care acceseaz aceeasi memorie central si care
functioneaz concomitent si coordonat, n cooperare strns, astfel nct
supercalculatorul poate atinge o performant total de calcul foarte ridicat. Modul
de operare al supercalculatoarelor este calculul paralel. Numrul de procesoare
interconectate ale unui supercalculator depseste la anumite modele chiar si
100.000.
Pentru a mentine costul unui asemenea supercalculator la un nivel rezonabil,
exist arhitecturi care fac uz de procesoare mai ieftine si mai lente, dar foarte
numeroase, grupate n asa-numite cluster-e.
Printre primele firme care au produs supercalculatoare pentru piat s-a
numrat firma Cray (modelul Cray-1 din 1976 a atins viteza de calcul de 130
Mflops). n acest domeniu, exist o list (actualizat de dou ori de an) a celor mai
rapide 500 de supercalculatoare din lume (Top 500), care se bazeaz pe testul
standardizat numit Linpack. Pe lng supercalculatoarele comerciale, exist si linia
supercalculatoarelor militare.
Exemplu: arhitectura supercalculatorului bazat pe IBM BlueGene/L.
Modelele IBM BlueGene detin momentan (2008) primele dou locuri n Top
500. Calculatorul se bazeaz pe un nou concept, care renunt la cresterea frecventei
de ceas n favoarea micsorrii componentelor, cresterii densittii acestora si
reducerii consumului de putere. Reducerea frecventei de ceas este compensat prin
mrirea gradului de paralelism, folosind un numr mai ridicat de procesoare.
Procesorul de baz este un PowerPC 440 la 700 MHz. Dou astfel de
procesoare sunt amplasate pe un cip mpreun cu o memorie cache L3 de 4 MB
partajat si 2 KB memorie cache L2 pentru fiecare procesor. Fiecare procesor are
dou porturi de ncrcare si unul de stocare ctre memoriile cache L2, functionnd
cu 8 biti/ciclu. Aceasta este jumtate din banda necesar celor dou unitti de
virgul mobil (FPU). Procesoarele au o memorie cache L1 de 32 KB pentru
instructiuni si date, n situatii favorabile atingnd performante de 2,8 Gflops/2. Se
observ c memoria cache L1 este mai mare dect L2, un lucru neobisnuit, care
permite ns atingerea unor viteze de procesare mai mari.
Arhitectura modelului IBM BlueGene/L este reprezentat n figura 2.29.
Sistemul este alctuit astfel: sunt introduse dou cipuri pe o plac cu o
memorie de 512 MB, saisprezece asemenea plci sunt plasate pe o alt plac nod,
iar 32 de plci nod sunt introduse ntr-un asa-numit cabinet. Asadar, un cabinet
contine 1024 cipuri (2048 CPU). Pentru configuratia maxim, se folosesc 64 de
cabinete cuplate, care formeaz un sistem cu 65.356 cipuri si 130.712 CPU.
n modul normal de operare, o unitate de procesare a unui cip este folosit
pentru calcule, iar cealalt, pentru sarcinile de comunicare. n acest fel,
performanta de vrf teoretic a sistemului este de 183,5 Tflops. Dac necesittile
de comunicare sunt mici, se pot folosi ambele procesoare pentru calcule, dublnd
viteza de vrf, ajungnd la 360 Tflops.
ARHITECTURA SISTEMELOR DE CALCUL
48
Fig. 2.29. Arhitectura IBM BlueGene/L.
Din punct de vedere al interconectrii, BlueGene/L posed mai multe retele:
dou retele pentru conectarea procesoarelor, o retea inel 3D si o retea arbore.
Reteaua inel este folosit pentru comunicatii generale, iar cea arbore pentru
comunicatii colective: broadcast, operatii de reducere etc. Lrgimea de band a
retelei arbore este de dou ori mai mare dect a retelei inel, ajungnd la 350 MB/s
(fat de 175 MB/s).
Performantele sistemului ajung la 280,6 Tflops pentru testul Linpack. n
urma testului, s-a efectuat rezolvarea unui sistem liniar de N = 1.769.471 ecuatii.
Eficienta rezultat a fost de 76%.
Supercalculatoarele care au la baz modelul IBM BlueGene/L
implementeaz arhitectura masiv paralel.
Aceasta const ntr-un numr de procesoare (de obicei, foarte mare de
ordinul miilor) interconectate si controlate de un singur computer central. Fiecare
CPU are memoria sa si spatiul de date propriu, care contine si o copie a sistemului
de operare. Toate blocurile CPU comunic ntre ele cu ajutorul unor interconectri
de foarte mare vitez.
Tipuri de arhitecturi
49
2.4. Exemple de arhitecturi
2.4.1. Arhitecturi uniprocesor
Se bazeaz pe cele trei componente majore: UCP, memoria, subsistemul I/O.
VAX 11/780 (superminicalculator)
Sistemul a fost produs de firma DEC. Schema de arhitectur general este
prezentat n figura 2.30. Aceasta contine:
CPU unitatea central de prelucrare, care include:
o R
0
, ..., R
15
= 16 registre generale a cte 32 biti fiecare;
o PC = contorul de program (program counter);
o ALU = unitatea aritmetic si logic;
o ML = memoria local;
MD = memorie de diagnoz;
CVM = coprocesor de virgul mobil;
MP = memoria principal (maxim 2
32
cuvinte);
C = consol;
F = floppy disk;
SBI = interfata cu magistrala sincron (Synchronous Bus Interface);
AU = adaptor unibus, cu (U) = magistral unibus;
AMB = adaptor masterbus, cu (M) = magistral masterbus.
CPU mai contine un registru de stare, care indic starea curent a
microprocesorului, a programului care se execut si a memoriei cache.
Fig. 2.30. Schema arhitecturii generale pentru VAX 11/780.
ARHITECTURA SISTEMELOR DE CALCUL
50
I BM 370/168
Fig. 2.31. Schema arhitecturii generale pentru IBM 370/168.
Schema de principiu (vezi figura 2.31) contine:
MP = memoria principal;
LSU = local storage unit (unitate de memorie local);
CM = controller memory (legtur multiport CPU memorie);
SS I/O = subsisteme de intrare-iesire (mai multe canale asincrone).
I BM RS/6000 model 250
Arhitectura simplificat este prezentat n figura 2.32.
Fig. 2.32. Schema arhitecturii generale pentru IBM RS/6000-250.
Schema de principiu contine:
PPC = PowerPC Processor Optimized With Enhanced RISC
Performance Chip;
SIMM = Small In-line Memory Modules (module de memorie);
CTRL = controler;
MCA = magistral de control si adres;
Ethernet = controler de retea.
Tipuri de arhitecturi
51
2.4.2. Arhitecturi multiprocesor
Arhitecturile multiprocesor sunt cel mai bun exemplu al tentativei de a
paraleliza un sistem de calcul. Acestea sunt de dou tipuri: cele care folosesc
procesoare multiple, discrete, pe o plac de baz sau sisteme hardware speciale si
cele care folosesc mai multe nuclee n interiorul unui singur procesor fizic.
2.4.2.1. Arhitecturi cu procesoare multiple
Arhitecturile cu procesoare multiple pot fi de dou feluri:
cu multiprocesare simetric;
cu multiprocesare asimetric.
Multiprocesarea simetric utilizeaz mai multe procesoare fizice legate
printr-o magistral de memorie partajat si suportul magnetic aferent (vezi
paragrafele 2.1.1.4 si 2.2.1.3, referitoare la sisteme cu memorie partajat shared
memory si calculatoare multiprocesor).
n cazul sistemelor cu arhitecturi de multiprocesare asimetric, fiecare
procesor are alt task. Exemple: cipseturile 3D din plcile grafice moderne si
cluster-ele de calculatoare personale (Beowulf), n care fiecare procesor are acces
numai la memoria calculatorului din care face parte (vezi paragraful 2.1.1.5,
referitor la sisteme fr memorie partajat shared nothing).
I BM RS/6000 model F50
Sistemul cuprinde ntre 1 si 4 procesoare Power PC cu cache extern si are o
magistral de 64 de biti. Memoria cache se numeste 8-way (cu 8 ci) pentru c datele
sunt grupate n seturi de cte 8 64 biti. Memoria foloseste date de 72 biti: 64 pentru
date si 8 pentru codul corector de erori (ECC = Erorr Correction Code). Procesorul
are o arhitectur de tip superscalar si poate executa pn la 4 instructiuni pe ciclu.
Caracteristici (vezi figura 2.33):
frecventa de tact: 166332 MHz, 87 MHz pentru magistrala de memorie;
32 KB cache de date, 32 KB cache de instructiuni;
magistral de date de 64 de biti si magistral de adrese de 32 de biti;
memorie de pn la 4 GB si memorie virtual de pn la 4 PB (1P = 2
52
).
Arhitectura I ntel multiprocesor
Arhitectura multiprocesor propus de firma Intel este reprezentat prin
schema din figura 2.34.
Notatiile din schem au urmtoarele semnificatii: BSP = Bootstrap Processor,
AP = Application Processor, APIC = Advanced Programmable Integrated Circuit,
ICC Bus = Interrupt Controller Communications Bus.
2.4.2.2. Arhitecturi biprocesor
Un sistem care suport dou procesoare trebuie s aib o plac de baz
adaptat pentru a servi dou CPU. n acest scop, placa de baz este dotat cu o
magistral special, a crei constructii depinde de la productor la productor, dar
care se conformeaz unor reguli generale.
ARHITECTURA SISTEMELOR DE CALCUL
52
Fig. 2.33. Schema arhitecturii generale pentru IBM RS/6000-F50.
Fig. 2.34. Schema arhitecturii Intel multiprocesor.
Astfel, cele dou CPU sunt servite de dou interfete paralele cu magistrala
principal a sistemului, iar arbitrarea traficului pe aceasta este efectuat de un
controler specializat. Accesul la magistral este multiplexat, astfel c la un anumit
moment de timp si pentru o durat bine stabilit (fix sau adaptat sarcinii curente)
accesul la magistral l are doar un singur procesor. Aceste tipuri de scheme pot
cuprinde zone de memorie cache comune (integral sau partial), iar magistrala poate
fi cu ltime variabil sau cu adaptare dinamic la cereri.
Tipuri de arhitecturi
53
Pentium I I biprocesor
Fig. 2.34. Arhitectura unui sistem biprocesor cu Pentium II.
AMD Athlon biprocesor
Este un exemplu de arhitectur biprocesor construit pe baza cipsetului 760 al
firmei AMD (vezi figura 2.35).
Fig. 2.35. Arhitectura unui sistem biprocesor cu AMD Athlon.
ARHITECTURA SISTEMELOR DE CALCUL
54
Cresterea performantelor este realizat prin utilizarea magistralei punct-la-
punct (Point-to-Point) si a modului snoop. Modul snoop permite citirea datelor de
ctre un procesor din cellalt procesor (prin intermediul Northbridge-ului),
nemaifiind necesar accesarea memoriei. Acest mod elimin tehnica prin care
datele necesare unuia din cele dou procesoare erau nscrise n memorie de ctre
primul procesor si apoi citite de ctre al doilea.
AMD K7 biprocesor
Microprocesorul AMD K7 lucreaz pe magistrala ultrarapid EV6 la
frecventa de 200 MHz. Astfel, K7 poate folosi memorii foarte rapide si cu lrgime
de band mare, cum este Rambus DRAM. Datorit suportului multiprocesor al
protocolului de magistral EV6, sistemele AMD pot fi folosite n domeniul statiilor
de lucru si al serverelor. Arhitectura EV6 permite o flexibilitate ridicat, cu
facilitti de tipul topologiei punct-la-punct si clock-forwarding. Magistralele de
date si de adrese sunt decuplate, procesorul putnd s emit cereri n timp ce
primeste date si comenzi de la logica de sistem. Tot aici sunt gestionate
transferurile cu sistemul, ctre memorie sau ctre magistralele AGP si PCI.
Schema bloc a acestei arhitecturi este prezentat n figura 2.36.
Fig. 2.36. Arhitectura unui sistem biprocesor cu AMD K7 pe magistrala EV6.
Sun SPARC I V biprocesor
Arhitectura biprocesor Sun SPARC IV este prezentat n figura 2.37.
Notatiile din schem au urmtoarele semnificatii: ECC = Error Checking/Correction
Code (cod de verificare/corectie de erori), DCSS = Dual Chip Data Switch (bloc de
alegere a cipului), SIU = System Interface Unit (unitatea de interfat cu sistemul),
MCU = Memory Control Unit (unitate de comand a memoriei).
Tipuri de arhitecturi
55
Fig. 2.37. Arhitectura Sun SPARC IV biprocesor.
Se observ c cele dou procesoare au att memorie cache comun, ct si
individual. Accesul la memoria comun se realizeaz prin intermediul unui
multiplexor, care nu permite lucrul simultan celor dou CPU cu aceasta, pentru a
preveni blocajele si erorile ce pot aprea n urma unor accesri simultane. Schema
este capabil s ruleze dou fire de executie (thread-uri) cu latente foarte mici de
scriere a cache-ului. De asemenea, accesul la magistrala principal este multiplexat,
pentru a preveni congestiile si erorile de transmisie. Strategia de gestiune a
memoriei cache este de tipul LRU (Least Recently Used cel mai putin recent
utilizat), ceea ce duce la mai multe sanse de a gsi n cache informatia necesar la
urmtoarea procesare (cache hit). Memoria acestui sistem este de tipul SDRAM.
Exist scheme care aduc mbunttiri suplimentare legate de administrarea
eficient a magistralei (prin repartizarea dinamic a duratelor de acces bazat pe
predictii si pe comportri anterioare ale proceselor care se repet la fiecare CPU etc.).
I ntel Xeon biprocesor
Sistemul este echipat cu dou procesoare Intel Xeon instalate pe o plac de
baz de tipul Supermicro P4DC6+. Aceast plac de baz este dotat cu cipsetul
i860, constituit din trei componente principale: Intel 82806AA PCI 64 Hub (Intel
P64H din figura 2.38), Intel 82860 Memory Controller Hub (MCH din figura 2.38)
si Intel 82801BA I/O Controller Hub (ICH2 din figura 2.38). Aceste blocuri
asigur un transfer foarte rapid de date att ntre procesoare, ct si ntre acestea si
memorie sau dispozitive periferice.
ARHITECTURA SISTEMELOR DE CALCUL
56
Fig. 2.38. Arhitectura sistemului Xeon biprocesor.
Pentru aceasta, arhitectura pune la dispozitie componentelor sistemului
(controlerul SCSI, sloturile PCI pe 32 sau 64 de biti) magistrale distincte, care
asigur separarea fluxurilor de date. Acest lucru este vital ntr-un server n care
schimbul de date dintre componente este realizat n flux continuu. Tot pentru o
sporire a vitezei de lucru, s-a recurs la utilizarea memoriei de tip RDRAM.
AMD Opteron biprocesor
Sistemul cu dou procesoare AMD Opteron 250 la 2,4 GHz foloseste o plac
de baz dotat cu cipsetul NVIDIA nForce Professional 2200. Noutatea acestei
configuratii este c procesoarele nu mpart aceeasi magistral pentru a accesa
memoria, ca la sistemele traditionale. n acel caz, magistrala reprezenta gtul
sticlei (bottleneck) sistemului, fiind un obstacol n calea procesrii la potentialul
maxim al CPU-urilor. Pentru a evita aceast limitare, AMD a recurs la o arhitectur
cu memorie cache neuniform, de tip ccNUMA (vezi figura 2.39).
Fiecare procesor dispune de un controler de memorie, care poate accesa o
portiune de memorie rezervat doar lui. Sunt evitate astfel suprapunerile de date si
alterarea reciproc a datelor provenite de la procesoare diferite. n plus, cele dou
CPU sunt interconectate printr-o magistral de mare vitez, de tipul HyperTransport
(tehnologie patentat de AMD), care nu are legtur direct cu memoria (spre
deosebire de un sistem clasic) si care asigur un dialog eficient ntre componente.
Cele dou procesoare pot accesa memoriile proprii cu latente foarte mici (mult
mai mici dect la sisteme traditionale), precum si memoria care nu le apartine direct,
dar cu latente mari. Aceasta nu constituie un dezavantaj, deoarece un CPU lucreaz
n mod normal doar n zona de memorie care i este repartizat. Totusi aceast
tehnologie are si un punct slab: organizarea corect a memoriei este crucial. Astfel,
arhitectura NUMA trebuie suportat att de sistemul de operare, ct si de aplicatii.
Tipuri de arhitecturi
57
Fig. 2.39. Arhitectura sistemului AMD Opteron biprocesor.
Sistemele de operare Windows XP si Windows server 2003 suport n
ntregime aceast tehnologie, optiunea activndu-se automat la detectarea unui
sistem de acest tip.
Calculatoarele biprocesor se preteaz pentru diverse aplicatii complexe, care
necesit putere de calcul. Aici intr aplicatiile grafice de modelare 3D, aplicatiile
de retea (mai ales dac sistemul este unul de tip nod coordonator de trafic sau
server pentru subretele de diverse dimensiuni) si aplicatiile specifice de prelucrare
a semnalelor n timp real. Tot ce au acestea n comun este faptul c sunt create
astfel nct s lucreze cu mai multe fire de executie simultan, conform principiilor
de calcul paralel. Aceste tipuri de algoritmi sunt create pentru a minimiza timpul de
executie foarte mare pe care l implic acele aplicatii n situatii normale.
n ultima vreme, cstig popularitate un nou tip de aplicatii care pot folosi
arhitectura biprcocesor, anume sistemele embedded. n esent, este vorba despre
conectarea n paralel, pe aceeasi plac, a dou (sau mai multe) procesoare
specializate, cu un scop bine definit, spre deosebire de calculatoarele personale,
care au scopuri multiple. De exemplu: prelucrarea unui semnal audio (codare si
decodare) si, eventual, transmiterea lui mai departe. Din aceast clas fac parte
procesoarele DSP de la firma Texas Instruments. Premisa acestor aplicatii este c
procesorul este adaptat s realizeze un numr restrns de operatii cu scopuri bine
determinate. n plus, DSP-ul este capabil s ruleze aplicatii de sine stttoare, care
s ofere interfat cu utilizatorul si suport pentru memorare si transmitere ctre alte
componente conectate la acesta. De exemplu: un subsistem care, conectat la un PC,
s codeze/decodeze fisiere audio n format mp3.
ARHITECTURA SISTEMELOR DE CALCUL
58
2.4.2.3. Arhitecturi multinucleu
Un procesor multinucleu combin dou sau mai multe nuclee ntr-un singur
cip fizic, care contine fie un circuit integrat cu toate nucleele, fie mai multe circuite
integrate interconectate. Un procesor cu mai multe nuclee implementeaz o
arhitectur de multiprocesare ntr-un singur pachet fizic. Un procesor cu toate
nucleele pe acelasi circuit integrat se numeste procesor multinucleu monolitic.
Nucleele pot partaja un singur cache de nivel nalt (de ex.: cache-ul L2
pentru procesoarele Core 2 de la Intel) sau pot avea cte un cache separat pentru
fiecare nucleu (de ex.: linia de procesoare dual-core de la AMD). Fiecare nucleu
implementeaz separat optimizri hardware, cum sunt: sisteme pipeline, executie
superscalar, extensii SSE, multithreading etc.
Un sistem cu n nuclee este eficient atunci cnd pe acesta se ruleaz n procese
(sau fire de executie) concurente si independente. Cele mai cunoscute procesoare
multinucleu sunt cele de pe piata calculatoarelor personale (Intel si AMD), precum
si cele folosite n consolele de jocuri pe televizor (de ex.: procesorul Cell folosit la
PlayStation 3 are 8 nuclee, iar Xenon folosit la Xbox360 are 3 nuclee).
Avantajele sistemelor cu procesoare multinucleu sunt:
Nucleele sunt apropiate fizic, ceea ce nseamn c semnalele trebuie s
parcurg o distant mai mic. Acestea permit procesoarelor s
interactioneze cu o frecvent mai mare dect dac ele ar fi fost separate
(dou procesoare pe o placa de baz).
Procesoarele multinucleu ofer designerilor posibilitatea de a face plcile
de baz mai mici dect pentru dou sau mai multe procesoare.
Un procesor cu dou nuclee consum mai putin dect dou procesoare
cu cte un singur nucleu, deoarece acestea necesit mai mult putere s
transmit aceleasi semnale n afara cipului,
Pretul produsului este mai redus, pachetul fizic fiind de un singur
procesor n loc de mai multe.
Dezavantajele sistemelor cu procesoare multinucleu sunt:
Desi, teoretic, dou procesoare pot dubla viteza de calcul, software-ul
trebuie optimizat pentru a beneficia de acest lucru, n functie de
posibilitatea aplicatiilor si a sistemului de operare de a crea fire de
executie (thread-uri) paralele si independente.
Integrarea a nc unui nucleu n acelasi circuit integrat pune probleme
deosebite din punct de vedere termic, deoarece, practic, acelasi pachet
fizic trebuie s disipeze de dou ori mai mult putere. Intel a rezolvat
aceast problem prin integrarea a dou nuclee dual-core si a unui cache
unificat n locul unui nucleu quad-core cu memorii cache separate. Astfel,
se forteaz lucrul numai al unuia dintre cele dou nuclee, n loc de toate
patru deodat, micsornd puterea instantanee disipat de ntregul procesor.
Din punct de vedere al arhitecturii, procesoarele cu un singur nucleu
folosesc mai eficient resursele de tranzistori de pe cip. Astfel, o
companie care produce procesoare trebuie tot timpul s aib o linie de
procesoare cu un singur nucleu n paralel cu cele multinucleu.
Tipuri de arhitecturi
59
Exist mai multi factori care limiteaz performanta real a unui sistem
multinucleu. n primul rnd, magistralele de sistem si de memorie sunt
partajate, astfel nct devin gtuiri (bottlenecks) care limiteaz fluxul
de date ctre nucleele multiple ale procesoarelor, n acelasi mod n care o
sosea cu prea putine benzi de circulatie produce uneori blocaje.
I ntel Core 2
Procesoarele Intel Core 2 Duo sunt produse folosind tehnologia de fabricare
Intel pe 65 nm. Versiunea pentru desktop-uri a procesoarelor furnizeaz o crestere
de 40% a performantei si este cu peste 40% mai eficient din punct de vedere al
consumului de energie, n comparatie cu cel mai bun procesor Intel anterior.
Potrivit analistilor independenti, procesoarele cstig 9 din cele 10 teste majore de
performant pentru desktop-uri, servere si calculatoare destinate jocurilor.
Familia de procesoare Intel Core 2 Duo este format din 5 procesoare pentru
platforme desktop destinate afacerilor, utilizrii individuale si entuziastilor pentru
tehnologie, precum si din 5 procesoare pentru notebook-uri.
Familia de procesoare Intel Core 2 Duo este bazat pe micro-arhitectura Intel
Core. Prin intermediul celor dou nuclee de executie, procesoarele pot executa cu
vitez un numr mai mare de instructiuni. De asemenea, procesoarele pot opera
mai rapid la lansarea simultan n executie a mai multor aplicatii, de exemplu,
scrierea unui e-mail n acelasi timp cu descrcarea de muzic si scanarea antivirus.
Procesoarele Dual-core contribuie la mbunttirea executiei programelor, de
exemplu, n cazul vizionrii unor clipuri high-definition sau al protejrii PC-ului n
timpul tranzactiilor financiare pe Internet, crescnd, de asemenea, autonomia
bateriei n cazul notebook-urilor, care pot deveni astfel mai subtiri si mai usoare.
Inovatiile aduse de Intel prin introducerea arhitecturii Intel Core 2 (Duo si
Exteme) sunt urmtoarele:
Intel Wide Dynamic Execution mbuntteste performanta si eficienta,
ntruct fiecare nucleu de executie poate realiza pn la 4 instructiuni simultan,
folosind un pipeline eficient n 14 stagii.
Intel Smart Memory Access mbuntteste performanta sistemului,
diminund latenta cipurilor de memorie si optimiznd astfel utilizarea lrgimii de
band disponibile pentru furnizarea datelor ctre procesor cnd si unde este nevoie.
Intel Advanced Smart Cache include o memorie cache L2 comun,
proiectat pentru a reduce consumul de energie prin micsorarea traficului de
memorie, si mreste performanta, permitnd unui nucleu de executie s utilizeze
ntreg cahe-ul atunci cnd cellalt nucleu nu este folosit. Aceast functie este
asigurat pentru toate segmentele de piat: server, desktop si notebook.
Intel Advanced Digital Media Boost dubleaz efectiv viteza de executie a
instructiunilor folosite cu precdere n aplicatiile grafice si multimedia.
Intel 64 Technology aceast mbunttire adus arhitecturii Intel pe 32 de
biti ofer suport pentru procesarea pe 64 de biti si permite procesorului s acceseze
o cantitate mai mare de memorie.
Nucleul de executie al procesorului Intel Core este reprezentat n figura 2.40.
Caracteristicile functionale ale acestei arhitecturi sunt expuse n cele ce urmeaz.
ARHITECTURA SISTEMELOR DE CALCUL
60
Fig. 2.40. Nucleul de executie al procesorului Intel Core.
Unitile de execuie cu numere ntregi
Intel Core are trei asemenea unitti pe 64 biti, fiecare dintre ele putnd
realiza operatii pe 64 biti ntr-un singur ciclu. Exist si o unitate pe 64 biti de
numere complexe (CIU Complex Integer Unit), care realizeaz n mare parte
aceeasi munc precum cea din P6, si dou unitti simple de numere ntregi (SIU
Simple Integer Unit), pentru operatiile uzuale, cum ar fi adunarea. Una din unittile
SIU mparte portul 2 cu BEU (Branch Execution Unit), pe care Intel o numeste
unitatea de salt n executie). Pe acest port, SIU este capabil s lucreze n tandem cu
BEU pentru a executa instructiuni macro (comparatii sau teste +jcc).
Posibilitatea de a realiza calcule pe 64 biti ntr-un singur ciclu este o
premier n arhitectura Intel 86 si aceasta l pune naintea IBM, cu al su Power
PC970, care are o latent de dou cicluri pentru operatii cu numere ntregi. n plus,
datorit unittilor ALU pe 64 biti care sunt pe porturi separate, Intel Core poate
mentine un total de trei operatii pe 64 biti per ciclu.
Unitile de execuie n virgul mobil
Intel Core are dou unitti de executie n virgul mobil, care se ocup de
ambele tipuri de operatii aritmetice: scalare si vectoriale.
Unitatea de executie de pe portul 1 se ocup cu adunri sau cu alte operatii
simple n virgul mobil, dup cum urmeaz:
scalar: simpl precizie (32 biti) si dubl precizie (64 biti);
vector: simpl precizie (4) si dubl precizie (2).
Tipuri de arhitecturi
61
Unitatea de executie n virgul mobil de pe portul 2 se ocup cu nmultiri si
mprtiri cu vectori si scalari n formatele listate mai sus.
Procesarea vectorial real pe 128 bii
Arhitectura Intel Core asigur latenta de un ciclu pentru operatiile vectoriale
pe 128 biti. Intel realizeaz acest lucru fcnd magistrala pentru virgul mobil si
cea intern de date cu ltimea de 128 biti, facilitate care nseamn c este necesar
doar o singur micro-operatie (care trebuie generat, trimis, programat si
realizat) pentru fiecare operatie vectorial pe 128 biti. De aceea, noul design nu
numai c elimin dezavantajul generat de latent, dar n acelasi timp mbuntteste
decodarea si programarea lrgimii de band, pentru c jumtate din micro-operatii
sunt generate pentru instructiuni vectoriale de 128 biti (vezi figura 2.41).
Fig. 2.41. Configuratia de procesare vectorial real pe 128 biti.
Pipeline-ul
Intel Core are un pipeline realizat n 14 stagii, la fel de lung ca la Power PC
970, aproximativ jumtate din cel de la Pentium 4 Prescott (~ 30 etape) si putin mai
lung dect cel de la P6 (12 etape). Aceasta nseamn c Intel Core este proiectat
pentru o crestere lent a vitezei de ceas si nu scaleaz la fel de rapid ca Pentium 4.
Fereastra de instruciuni
Deoarece partea din spate este mult mai lat dect a predecesorilor, buffer-ul
de reorganizare (Reorder Buffer, ROB) a crescut la 96 de intrri, de la 40 ct avea
Pentium M, iar statia de rezervare (Reservation Station, RS) a fost mrit.
Fereastra de instructiuni din Intel Core a fost mrit nu numai fizic (ROB +
RS), ci si virtual. Macro-fuziunea si micro-operatiile (descrise anterior), permit lui
Intel Core s retin mai multe instructiuni cu un numr mai mic de resurse
hardware.
ARHITECTURA SISTEMELOR DE CALCUL
62
Deoarece ltimea executiei a fost mrit considerabil, vechiul hardware de
decodare al lui P6 ar fi fost inadecvat pentru a tine restul procesorului ocupat cu
micro-operatii. Intel a trebuit s mreasc rata de decodare, n asa fel nct mai multe
micro-operatii/ciclu s ajung la final. Primul lucru pe care l-a fcut a fost s adauge
nc un decodor simplu si rapid, ceea ce nseamn c decodorul hardware poate
trimite pn la 7 instructiuni pe ciclu n coada de asteptare ROB (vezi figura 2.42).
Fig. 2.42. Structura hardware pentru decodarea instructiunilor din arhitectura Intel Core.
AMD Opteron Dual-core
n figura 2.43 este reprezentat arhitectura simplificat a procesorului
Opteron Dual-core.
Fig. 2.43. Arhitectura AMD Opteron Dual-core.
Tipuri de arhitecturi
63
Tehnologic vorbind, AMD nu a realizat doar o simpl alipire a unei perechi
de nuclee K8 pe o bucat de siliciu, ci a efectuat o integrare la nivelul de baz,
astfel nct cele dou nuclee s poat actiona mpreun mai eficient. Fiecare dintre
nucleele K8 are propriul su cache L2, independent, ncorporat, dar cele dou
nuclee mpart o coad comun a cererilor de sistem, un controler de memorie DDR
de tip dual-channel si un set de legturi HyperTransport cu mediul exterior.
Accesul la resursele I/O este adjudecat printr-o retea crossbar sau printr-un
switch, astfel nct fiecare CPU poate comunica direct si eficient cu memoria sau
cu dispozitivele I/O. n unele privinte, Opteron Dual-core se comport foarte
asemntor unui sistem cu multiprocesare simetric on-chip, transfernd date intern
ntre cele dou nuclee. Cu toate acestea, pentru restul infrastructurii I/O a
sistemului, Opteron Dual-core pare asemenea versiunii mononucleu.
Arhitectura de sistem pentru Opteron este foarte diferit de cea a
competitorului su principal, Intel Xeon. Arhitectura AMD Direct Connect a fost
supra-dimensionat pentru procesorul Opteron mononucleu, anticipnd viitorul
dual-core. Fiecare procesor (mono- sau binucleu) are propriul su controler de
memorie DDR local de tip dual-channel, iar procesoarele comunic ntre ele si cu
cipurile I/O prin legturi HyperTransport punct-la-punct, la frecventa de 1 GHz.
Lrgimea total de band posibil prin cei 940 de pini ai procesorului Opteron 875
este de 30,4 GB/s. Cu o legtur HyperTransport mai putin, procesorul Opteron
275 poate atinge, teoretic, viteza de 22,4 GB/s.
Prin contrast, procesoarele Xeon actuale au o magistral front-side (FSB)
partajat, pe care lucreaz cipul Northbridge (cu controler de memorie) si ambele
procesoare. La frecventa de 800 MHz, lrgimea total de band este de 6,4 GB/s,
ceea ce poate fi un bottleneck n anumite situatii.
AMD Phenom Triple-core
AMD are n productie un procesor cu trei motoare de procesare, proiectul
numindu-se AMD Phenom 3 chip (vezi figura 2.44).
Fig. 2.44. Arhitectura AMD Phenom Triple-core.
ARHITECTURA SISTEMELOR DE CALCUL
64
Noul microprocesor triple-core prezint propriul design si nu este un cip
quad-core cu un core dezactivat. Totusi, cipurile includ 2 MB de cache L3 partajat
si beneficiaz de caracteristicile micro-arhitecturii K10, cum sunt setul de
instructiuni SSE4A si unittile de prelucrare n virgul mobil (FPU) de 128 biti.
Evident, cipurile dispun de posibilitti avansate de gestiune a puterii.
Potrivit unor estimri ale laboratoarelor X-bit, fiecare motor al procesoarelor
quad-core AMD Opteron/Phenom ocup aproximativ 13% din aria fizic a
capsulei. Date fiind ntreaga dimensiune de 285 mm si numrul de aproximativ
218 cipuri candidate obtinute din fiecare bucat de 300 mm, este neobisnuit faptul
c AMD a decis dezvoltarea unui design triple-core cu aria fizic de 247 mm si
250 de cipuri candidate obtinute de pe o bucat de 300 mm. Tehnic, AMD poate
realiza usor microprocesoare cu un numr impar de motoare de procesare datorit
arhitecturii sale Direct Connect. Cu versiunile sale Phenom si Athlon 64 2, AMD
are de combtut procesoarele Intel Core 2 (dual-core si quad-core).
I ntel i AMD Quad-core
Ca replic la lansarea CPU-urilor quad-core de la Intel, AMD a lansat
propria platform, Quad FX. Aceast platform este un sistem de multiprocesare
simetric, utiliznd dou CPU-uri Athlon 64 FX dual-core. De aceea, un calculator
personal Quad FX are dou procesoare fizice dual-core care lucreaz n paralel,
avnd n total, n sistem, patru nuclee CPU. Aceste dou CPU-uri sunt
interconectate printr-o magistral coerent dedicat tehnologiei HyperTransport.
n CPU-urile quad-core de la Intel, nucleele sunt organizate n perechi.
Nucleele fiecrei perechi pot interschimba informatii direct (la fel se ntmpl la
AMD dual-core si la Intel Core 2 Duo), dar pentru a schimba informatii cu unul
dintre nucleele localizate n cealalt pereche trebuie s acceseze magistrala extern
a CPU, ceea ce se ntmpl pe platforma Quad FX, unde CPU-urile comunic ntre
ele folosind magistrala extern coerent HyperTransport.
Diferenta dintre platforma Quad FX si arhitectura utilizat de ctre
procesoarele Intel quad-core se poate remarca n figurile 2.45 si 2.46.
Comparnd cele dou arhitecturi, se poate observa c platforma Quad FX
detine un avantaj n ceea ce priveste accesul la memorie. Magistrala extern a
CPU-ului Intel quad-core (Front Side Bus, FSB) este utilizat pentru a accesa
memoria RAM si alte dispozitive prezente pe PC, precum si pentru comunicarea
ntre perechile de nuclee, cu viteze de pn la 8 GB/s.
Pe platforma Quad FX, CPU-urile folosesc un canal de comunicatie dedicat
(magistrala coerent HyperTransport), care transfer date cu pn la 4 GB/s n
fiecare directie. Magistrala HyperTransport ofer dou canale de comunicatie, cte
unul pentru fiecare directie. n procesoarele AMD, controlerul de memorie este
ncorporat n CPU si, ca urmare, memoria este accesat utiliznd o magistral
dedicat, separat de canalul folosit de ctre CPU pentru a accesa restul PC-ului.
Datorit faptului c platforma Quad FX foloseste o arhitectur de
multiprocesare simetric, fiecare CPU si acceseaz propria memorie RAM.
Procesoarele utilizate pe platforma Quad FX pot accesa, de asemenea, memoria
controlat de un alt CPU.
Tipuri de arhitecturi
65
Fig. 2.45. Arhitectura Intel quad-core
Fig. 2.46. Arhitectura AMD Quad FX.
n ultima vreme, cstig popularitate sistemele de tip embedded. Este vorba
despre conectarea n paralel a mai multor procesoare specializate, pe aceeasi plac,
cu un scop bine definit. De exemplu, prelucrarea unui semnal audio (codare si
decodare) n format mp3. Procesorul este adaptat s realizeze un numr restrns de
operatii specifice, iar DSP-urile sunt capabile s ruleze aplicatii de sine stttoare,
care s ofere interfat cu utilizatorul, suport pentru memorare si transmitere.
S-ar putea să vă placă și
- ASC 2 Tipuri de ArhitecturiDocument47 paginiASC 2 Tipuri de ArhitecturiCosmin Florin CodreanuÎncă nu există evaluări
- ASC 2 Tipuri de Arhitecturi SUBLINIATDocument47 paginiASC 2 Tipuri de Arhitecturi SUBLINIATAlex AlexandruÎncă nu există evaluări
- Capitolul 2 Tipuri de Arhitecturi PDFDocument48 paginiCapitolul 2 Tipuri de Arhitecturi PDFmariusÎncă nu există evaluări
- Curs3 2013 Arhitecturi Paralele Clasificarea FlynnDocument70 paginiCurs3 2013 Arhitecturi Paralele Clasificarea FlynnAna-maria AndrusicÎncă nu există evaluări
- Atestarea 1 AC RezolvatDocument10 paginiAtestarea 1 AC RezolvatIon DamaschinÎncă nu există evaluări
- Clasificarea Sistemelor de CalculDocument6 paginiClasificarea Sistemelor de CalculLucia ErhanÎncă nu există evaluări
- Atestarea AcDocument11 paginiAtestarea AcCristina FloreaÎncă nu există evaluări
- Sisteme de Calcul MultiprocesoraleDocument10 paginiSisteme de Calcul MultiprocesoraleVictoria AbramovschiÎncă nu există evaluări
- Ac ExamDocument92 paginiAc ExamNegru TatianaÎncă nu există evaluări
- Micro Proceso AreDocument3 paginiMicro Proceso AreIoana Nicoleta CocliciÎncă nu există evaluări
- Referat Arhitectura MicroprocesoarelorDocument5 paginiReferat Arhitectura MicroprocesoarelorrobertexeÎncă nu există evaluări
- carteMicrocontrolereMH FINAL PDFDocument210 paginicarteMicrocontrolereMH FINAL PDFPitzy Locca100% (1)
- Capitolul IiiDocument6 paginiCapitolul IiiMoisii PetruÎncă nu există evaluări
- Arhitectura Sistemelor de Calcul (ASC)Document13 paginiArhitectura Sistemelor de Calcul (ASC)Eduard StanescuÎncă nu există evaluări
- Taxonomia Lui FlynnDocument2 paginiTaxonomia Lui FlynnCkitzaÎncă nu există evaluări
- MicrocontrolereDocument22 paginiMicrocontrolereAlexandru-Iulian IfrimÎncă nu există evaluări
- Curs01 IntroducereDocument20 paginiCurs01 IntroducereIulia DuresÎncă nu există evaluări
- CIB 141 L1 Tonu AlexandruDocument20 paginiCIB 141 L1 Tonu AlexandruasaqwdqwfwefÎncă nu există evaluări
- Curs01 IntroducereDocument20 paginiCurs01 IntroduceredivegentÎncă nu există evaluări
- Prez 2Document24 paginiPrez 2Cosmin TomaÎncă nu există evaluări
- Microprocesoare Si MicrocontrolereDocument265 paginiMicroprocesoare Si MicrocontrolereDragos SimonaÎncă nu există evaluări
- Unitatea Centrala de Prelucrare PDFDocument57 paginiUnitatea Centrala de Prelucrare PDFDarie LeoleaÎncă nu există evaluări
- Referat Procesoare Multi-CoreDocument3 paginiReferat Procesoare Multi-CoreAlex GherlaÎncă nu există evaluări
- SSC Course 6 Rom CPUDocument19 paginiSSC Course 6 Rom CPUkoder57776Încă nu există evaluări
- CursArhCap9 1Document33 paginiCursArhCap9 1Victoria AbramovschiÎncă nu există evaluări
- Initiere ITDocument119 paginiInitiere ITjulia007100% (1)
- Structura Fizica A PC-uluiDocument13 paginiStructura Fizica A PC-uluiEduard FilipÎncă nu există evaluări
- LaurentiuDuca Prezentare Referatul 2Document26 paginiLaurentiuDuca Prezentare Referatul 2Laurentiu-Cristian DucaÎncă nu există evaluări
- Tipuri de Microprocesoare - Docx BardanDocument5 paginiTipuri de Microprocesoare - Docx BardanBardan MariusÎncă nu există evaluări
- Referat MihaiDocument8 paginiReferat MihaiAndreea GheorgheÎncă nu există evaluări
- Componentele CalculatoruluiDocument3 paginiComponentele CalculatoruluiCristina SuceavaÎncă nu există evaluări
- Tema 3 ACR RomDocument20 paginiTema 3 ACR RomAlex RacuÎncă nu există evaluări
- Lucrarea 1 Structura FizicaDocument13 paginiLucrarea 1 Structura FizicaJoe CercelaruÎncă nu există evaluări
- Arhitectura Sistemelor de CalculDocument8 paginiArhitectura Sistemelor de CalculDru BarrettÎncă nu există evaluări
- Carte SMPDocument213 paginiCarte SMPAdrian FilipÎncă nu există evaluări
- Subiecte Sisteme Bazate Pe MicroprocesoareSubiecte Sisteme Bazate Pe MicroprocesoareSubiecte Sisteme Bazate Pe MicroprocesoareDocument36 paginiSubiecte Sisteme Bazate Pe MicroprocesoareSubiecte Sisteme Bazate Pe MicroprocesoareSubiecte Sisteme Bazate Pe MicroprocesoaredetonatorulÎncă nu există evaluări
- Curs SMDocument1.128 paginiCurs SMstanescu nanuÎncă nu există evaluări
- Curs 1Document34 paginiCurs 1Diana MateiÎncă nu există evaluări
- Clasificarea CalculatoarelorDocument4 paginiClasificarea CalculatoarelorHellen DiÎncă nu există evaluări
- Microprocesoare, Curs 1Document15 paginiMicroprocesoare, Curs 1Petrovai AlexandruÎncă nu există evaluări
- Cap 10Document139 paginiCap 10micumarianÎncă nu există evaluări
- Initiere ITDocument190 paginiInitiere ITDaniel BușagăÎncă nu există evaluări
- Intrebari Centralizate UPDocument22 paginiIntrebari Centralizate UPCristi CiorteaÎncă nu există evaluări
- Curs10 11Document18 paginiCurs10 11Cezara CocuÎncă nu există evaluări
- MicroprocesorulDocument33 paginiMicroprocesorulRaul LazarÎncă nu există evaluări
- Lucrarea Practica 3Document51 paginiLucrarea Practica 3Puzderi IgorÎncă nu există evaluări
- Cursul 3 - Multitasking. Segmentare. Paginare Si Memoria Cache. Arhitectura Procesoarelor Intel. Sistemul de Intreruperi.Document23 paginiCursul 3 - Multitasking. Segmentare. Paginare Si Memoria Cache. Arhitectura Procesoarelor Intel. Sistemul de Intreruperi.Patric PopaÎncă nu există evaluări
- Raport de An PSMDocument19 paginiRaport de An PSMIon CaimacanÎncă nu există evaluări
- Carte Var FinalDocument87 paginiCarte Var FinalCoz AnimationÎncă nu există evaluări
- Proiect La PSMDocument19 paginiProiect La PSMIon CaimacanÎncă nu există evaluări
- Retele FINAL TEORIEDocument169 paginiRetele FINAL TEORIEIonut SosÎncă nu există evaluări
- Caracteristici RISC, UltraSPARC II Si MagistraleDocument9 paginiCaracteristici RISC, UltraSPARC II Si MagistraleRoccoSuasitoÎncă nu există evaluări
- Componentele CalculatoruluiDocument10 paginiComponentele CalculatoruluiOnutza AmarieiÎncă nu există evaluări
- Cursuri EcomarketingDocument84 paginiCursuri EcomarketingAndreea GheorgheÎncă nu există evaluări
- Recenzie La Emile Durkheim - Regulile Metodei SociologiceDocument7 paginiRecenzie La Emile Durkheim - Regulile Metodei SociologiceLavinia Benedic100% (1)
- TMS320C54x 55xDocument10 paginiTMS320C54x 55xMops LightÎncă nu există evaluări
- Operatori CursuriDocument11 paginiOperatori CursuriMops LightÎncă nu există evaluări
- SEP - TMS320C10 - Cap13Document21 paginiSEP - TMS320C10 - Cap13Mops LightÎncă nu există evaluări
- TMS320C62x 64xDocument9 paginiTMS320C62x 64xMops LightÎncă nu există evaluări
- Subiecte SEPDocument2 paginiSubiecte SEPMops LightÎncă nu există evaluări
- Sep - tms320c8x Cap16Document13 paginiSep - tms320c8x Cap16Mops LightÎncă nu există evaluări
- SEP - Procesoare Digitale de Semnal in Virgula Mobila-Cap15Document5 paginiSEP - Procesoare Digitale de Semnal in Virgula Mobila-Cap15Mops LightÎncă nu există evaluări
- ASC 4 Nivelul Fizic SublDocument51 paginiASC 4 Nivelul Fizic SublMops LightÎncă nu există evaluări
- Capitolul 12 - Stadiul Actual Si Persoectivele Procesoarelor DSPDocument11 paginiCapitolul 12 - Stadiul Actual Si Persoectivele Procesoarelor DSPFrunza BogdanÎncă nu există evaluări
- SEP - Procesoare Digitale de Semnal in Virgula Fixa. Fam. TMS320C24x28x-Cap14Document19 paginiSEP - Procesoare Digitale de Semnal in Virgula Fixa. Fam. TMS320C24x28x-Cap14Mops LightÎncă nu există evaluări
- ASC 3 Structura Unui Calculator (II)Document35 paginiASC 3 Structura Unui Calculator (II)Alis Madalina EneÎncă nu există evaluări
- ASC 3 Structura Unui Calculator (II)Document35 paginiASC 3 Structura Unui Calculator (II)Alis Madalina EneÎncă nu există evaluări
- ASC - 1 - Introducere Subliniat PDFDocument10 paginiASC - 1 - Introducere Subliniat PDFMops LightÎncă nu există evaluări
- ASC 3 Structura Unui Calculator (I)Document70 paginiASC 3 Structura Unui Calculator (I)raduelek87Încă nu există evaluări
- ASC 3 Structura Unui Calculator (I) SubliniatDocument70 paginiASC 3 Structura Unui Calculator (I) SubliniatMops LightÎncă nu există evaluări
- DespaduririDocument12 paginiDespaduririRazvan Rzv100% (1)
- ASC 1 IntroducereDocument10 paginiASC 1 IntroducereMops LightÎncă nu există evaluări
- Defrişarea PădurilorDocument11 paginiDefrişarea PădurilorMops LightÎncă nu există evaluări