Documente Academic
Documente Profesional
Documente Cultură
Mef 5
Încărcat de
cselesTitlu original
Drepturi de autor
Formate disponibile
Partajați acest document
Partajați sau inserați document
Vi se pare util acest document?
Este necorespunzător acest conținut?
Raportați acest documentDrepturi de autor:
Formate disponibile
Mef 5
Încărcat de
cselesDrepturi de autor:
Formate disponibile
41
Sub form condensat:
{ } [ ] { } =
e
K F
Observaii :
Dimensiunile matricei de rigiditate a unei bare sunt diferite n funcie de tipul structurii
(plan sau spaial);
Dimensiunile matricei de rigiditate a barei este n x n n care n = 2 n
g.d.l
; n
g.d.l
reprezint numrul gradelor de libertate sau a deplasrilor (rotirilor) necunoscute pe
nod;
astfel dimensiunile matricei de rigiditate a barei este :
4 x 4 la structuri plane din bare articulate;
6 x 6 la structuri tip cadru plan;
6 x 6 la structuri spaiale din bare articulate;
12 x 12 la structuri tip cadru spaial;
Pentru un element tip bar este necesar s fie constante caracteristicile mecanice ale
materialului i caracteristicile geometrice ale seciunii transversale; pentru bara cu
seciune variabil vor fi plasate noduri suplimentare ntre cele dou noduri ce delimiteaz
elementul;
Elementele tip bar sunt foarte precise i permit n foarte multe situaii evitarea
discretizrii n elemente bi-sau tridimensionale;
2.4. Asamblarea elementelor
2.4.1. Trecerea de la un sistem de referin la altul
Orice bar se integreaz, n general,
ntr-o structur plan sau spaial. ntr-o
structur spaial n fiecare nod acioneaz
doi vectori for: un vector for propriu-zis i
un vector moment, cu cte trei componente
fiecare. De asemenea n fiecare nod exist doi
vectori-deplasare: un vector - translaie i un
vector -rotaie tot cu cte trei componente
fiecare (fig.2.26.).
Fig.2.29.
Matricea de rigiditate respectiv vectorul forelor i al deplasrilor se stabilete iniial
pentru sistemul de referin local ( x
0
Oy
0
), care are axa Ox
0
de-a lungul axei barei.
Pentru exprimarea matricei de rigiditate n raport cu sistemul de referin global, la
care se raporteaz ntreaga structur este necesar exprimarea componentelor vectorului for,
i a vectorului deplasare fa de acest sistem.
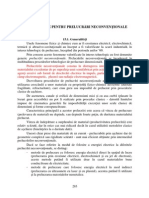
Pentru transferarea datelor de la sistemul de referin local la sistemul de referin
global se folosete matricea de transformare ( matricea de rotaie ) notat cu [T] de
dimensiuni (3x3) . Fie vectorul deplasare al unui nod, v, cu componentele v
x0
i v
y0
fa
de sistemul de referin local, respectiv v
x
i v
y
fa de sistemul de referin global
(fig.2.29.).
O
y
0
Y
v
y 0
x
0
X
v
x 0
v
y 0
v
x
v
42
Astfel:
=
+ =
sin cos
sin cos
0
0
X Y y
Y X x
v v v
v v v
sau:
+ =
+ =
cos sin
sin cos
0
0
Y X y
Y X x
v v v
v v v
Sistemul se poate exprima matriceal :
)
`
=
)
`
Y
X
y
x
v
v
v
v
cos sin
sin cos
0
0
vectorul exprimat prin matricea de vectorul exprimat prin
proieciile n sistemul transformare proieciile n sistemul
de referin local de referin global
Sub form condensat:
{ } [ ]{ } v T v
'
=
0
n care [ T
] matricea de transformare:
[ ]
(
=
(
=
c s
s c
T
cos sin
sin cos
'
n care s-a notat: c s = = cos ; sin
Matricea [T
] este ortogonal, determinnd asociat matricei [T
] = cos
2
+ sin
2
=1,
astfel c:
[ ] [ ] [ ] [ ] [ ] I T T T T
T T
= =
' ' ' '
respectiv:
[ ] [ ]
1
=
' '
T T
T
Pentru bara cu dou noduri matricea de transformare este:
[ ]
[ ]
[ ]
(
(
(
(
(
=
(
=
c s
s c
c s
s c
T
T
T
0 0
0 0
0 0
0 0 0
0
'
'
Se consider o bar dublu articulat, aparinnd unei structuri plane de bare articulate
(structur tip grind cu zbrele) (Fig.2.30.). Articulaiile nu transmit momente i fore
transversale, astfel c bara articulat este solicitat numai de fore axiale. Deplasrile
nodurilor pot fi dup dou direcii. Se consider apariia unor fore i deplasri fictive (nule) i
dup direcia perpendicular pe axa barei.
43
Fig.2.30.
n fig.2.30. s-a notat cu :
- F
1x0
, F
2xo
solicitarea real;
- F
1yo,
F
2yo
solicitarea fictiv;
Exprimarea matriceal a ecuaiei elementului finit este:
(
(
(
(
(
(
20
20
10
10
0 2
0 2
0 1
0 1
0 0 0 0
0 0
0 0 0 0
0 0
v
u
v
u
EA EA
EA EA
F
F
F
F
y
x
y
x
l l
l l
vectorul forelor matricea de rigiditate vectorul deplasrilor
Sub form condensat:
{ } [ ] { }
e e e
k F
0 0 0
=
Relaia reprezint ecuaia elementului finit a barei dublu articulate fa de sistemul de
referin local.
Se raporteaz bara dublu articulat fa de un sistem de referin global (fig.2.31.).
Componentele vectorului for, respectiv a vectorului deplasare fa de sistemul de referin
global sunt:
{ } { }
Y X Y X
T
e
F F F F F
2 2 1 1
=
{ } { }
2 2 1 1
v u v u
T
e
=
Pentru transferul vectorului for i a vectorului deplasare fa de sistemul de referin
global se utilizeaz matricea de transformare [T] :
{ } [ ]{ }
e e
F T F =
0
{ } [ ]{ }
e e
T =
0
y
x
0
2 1
F
2x 0
F
1x 0
E, A, l
u
20
u
10
F
1y 0
F
2y 0
x
0
v
10
v
20
44
Fig.2.31.
Se introduc acestea n ecuaia elementului finit:
[ ]
20
20
10
10
0
2
0 2
0 1
0 1
v
u
v
u
K
F
F
F
F
e
yo
x
y
x
innd cont c [ ] [ ]
T
T T =
1
rezult:
[ ]{ } [ ] [ ] { } [ ]
1
0
= T T K F T
e e
e
/
{ } [ ] [ ][ ]{ }
e e
e
T K T F =
0
1
sau:
[ ]
[ ]
[ ]
(
(
(
(
(
(
(
(
2
2
1
1
0
2
2
1
1
0 0
0 0
0 0
0 0
0 0
0 0
0 0
0 0
v
u
v
u
c s
s c
c s
s c
K
c s
s c
c s
s c
F
F
F
F
T
e
T
y
x
y
x
T
4 4 4 3 4 4 4 2 1 4 4 4 3 4 4 4 2 1
Sub form condensat:
{ } [ ] [ ] [ ] { }
e e T e
T K T F =
0
Dac se scrie ecuaia elementului finit fa de sistemul sistemul de referin global, acesta
este:
{ } [ ] { }
e e e
K F =
n care :
[K
e
] - este matricea de rigiditate a elementului fa de sistemul de referin global;
X
1
2
u
1
F
1X
v
1
F
1Y
F
2X
u
2
v
2
F
2Y
x
0
Y
y
0
45
Astfel se poate scrie expresia matricei de rigiditate a elementului fa de sistemul de
referin global ca fiind :
[ ] [ ] [ ] [ ] T K T K
e T e
=
0
Observaii :
Se poate constata c matricea de rigiditate a elementului fa de sistemul de referin
global este i ea simetric ( transpusa unei matrici pptrate i simetrice este matricea
nsi ):
[ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ]
e e T
T
e T
T
e
K T K T T K T K = = =
0 0
Principiul de calcul este similar pentru vectorul forelor i vectorilor deplasare i n cazul
barelor aparinnd structurilor plane sau spaiale (cu trei sau ase grade de libertate pe
nod). Matricea de transformare este de forma:
[ ]
(
(
(
=
3 3 3
2 2 2
1 1 1
n m l
n m l
n m l
T
'
n care l, m, n reprezint cosinuii directori ai axelor 0x
0
, 0y
0
, 0z
0
ale sistemului de
referin local, cu axele OX, OY, OZ ale sistemului de referin global:
l
1
= cos(X,x
0
) ; m
1
= cos(Y,x
0
) ; n
1
= cos(Z,x
0
)
l
2
= cos(X,y
0
) ; m
2
= cos(Y,y
0
) ; n
2
= cos(Z,y
0
)
l
3
= cos(X,z
0
) ; m
3
= cos(Y,z
0
) ; n
3
= cos(Z,z
0
).
n cazul unei bare aparinnd unei structuri spaiale, matricea de transformare are
dimensiunile (12 x 12) i este :
[ ]
[ ]
[ ]
[ ]
[ ](
(
(
(
(
=
`
`
`
`
T
T
T
T
T
0 0 0
0 0 0
0 0 0
0 0 0
n care :
[ ]
'
T este matricea de rotaie ; numrul de repetiii a matricei [ ]
'
T n matricea [ ] T este
dat de numrul de noduri ale elementului finit ;
n cazul unei stri plane la care presupunem axa Oz
0
identic cu OZ, [ ]
'
T are forma:
[ ]
(
(
(
=
0 0 0
0
0
c s
s c
T
'
respectiv, pentru bara cu dou noduri ( 6 x 6) :
[ ]
[ ]
[ ]
(
=
'
'
T
T
T
0
0
46
2.4.2. Mecanismul asamblrii matricelor elementare. Matricea de rigiditate a structurii
Exemplul 1 : se consider structura din fig.2.32. rezultat din asamblarea a trei elemente tip
bar puse cap la cap.
Fig.2.32.
Corespunztor relaiei (3.16) fiecare element are matricea de rigiditate de forma:
[ ]
(
=
(
(
(
=
k k
k k
EA EA
EA EA
K
e
l l
l l
sau sub form general pentru un element delimitat de nodurile ii j :
[ ]
(
=
jj ji
IJ ii
e
k k
k k
K
n care :
- k
ii,
, k
jj
rigiditi de nod;
- k
ij
, k
ji
rigiditi de linie;
Matricele de rigiditate pentru cele trei elemente sunt :
[ ] [ ] [ ]
(
=
(
=
(
=
3
44
3
43
3
34
3
33 3
2
33
2
32
2
23
2
22 2
1
22
1
21
1
12
1
11 1
; ;
k k
k k
K
k k
k k
K
k k
k k
K
Matricea de rigiditate a structurii formate din cele trei elemente tip bar, rezult din
asamblarea, matricelor de rigiditate elementale, respectnd ordinea logic a nodurilor :
F
4
u
3
u
4
F
2
F
3
u
1
u
2
2 1 3 4
F
1
1 2 3
47
[ ]
(
(
(
(
(
(
(
(
(
(
\
|
|
\
|
\
|
\
|
+ |
\
|
|
\
|
\
|
\
|
+ |
\
|
|
\
|
\
|
|
\
|
=
3 3
3 3 2 2
2 2 1 1
1 1
0 0
0
0
0 0
l l
l l l l
l l l l
l l
EA EA
EA EA EA EA
EA EA EA EA
EA EA
K
str
sau:
[ ]
(
(
(
(
(
+
+
=
3
44
3
43
3
34
3
33
2
33
2
32
2
23
2
22
1
22
1
21
1
12
1
11
0 0
0
0
0 0
k k
k k k k
k k k k
k k
K
str
sau:
numr nod 1 2 3 4
[ ]
(
(
(
(
=
44 43 42 41
34 33 32 31
24 23 22 21
14 13 12 11
4
3
2
1
k k k k
k k k k
k k k k
k k k k
K
str
n care:
1
11 11
k k = ;
1
12 12
k k = ;
1
21 21
k k = ;
2
22
1
22 22
k k k + = ;
2
23 23
k k = ;
2
32 32
k k = ;
3
33
2
33 33
k k k + = ;
3
34 34
k k = ;
3
43 43
k k = ;
3
44 44
k k =
i:
0
42 41 31 24 14 13
= = = = = = k k k k k k
Vectorul forelor, respectiv vectorul deplasrilor pentru structura studiat sunt:
{ } { }
{ } { }
4 3 2 1
4 3 2 1
u u u u
F F F F F
T
T
=
=
Rezult ecuaia matriceal a comportrii structurii :
[ ]
(
(
(
(
4
3
2
1
44 43 42 41
34 33 32 31
24 23 22 21
14 13 12 11
4
3
2
1
u
u
u
u
k k k k
k k k k
k k k k
k k k k
F
F
F
F
str
K
4 4 4 4 3 4 4 4 4 2 1
n care: 0
42 41 31 24 14 13
= = = = = = k k k k k k
48
[ ]
(
(
(
(
4
3
2
1
44 43
34 33 32
23 22 21
12 11
4
3
2
1
0 0
0
0
0 0
u
u
u
u
k k
k k k
k k k
k k
F
F
F
F
str
K
4 4 4 4 3 4 4 4 4 2 1
Sub form condensat :
{ } [ ] { } =
str
K F
Exemplul 2 : un alt exemplu pentru ilustrarea algoritmului de asamblare, l constituie
structura de bare articulate din fig.2.33.
Numrul de noduri ale structurii : 5;
Numrul de elemente finite tip bar cu articulaii: 7;
Fig.2.33.
Structura este raportat la un sistem de coordonate global xOy cu originea n nodul 1
al structurii.
Fiecare element este definit de dou noduri, fiecare nod avnd dou grade de libertate :
cte translaie de-a lungul axelor Ox i Oy (u, v).
Dimenssiunile matricelor de rigiditate a fiecrei bare articulate cu doua noduri va fi de
2x2 submatrici, fiecare submatrice de dimensiunea de 2 x 2 g.d.l./nod, rezultnd astfel
dimensiunile 4 x 4:
[ ] [ ] [ ]
[ ] [ ] [ ]
(
=
(
=
(
=
(
=
(
=
(
=
55 53
35 33 6
44 43
34 33 5
44 42
24 22 4
44 41
14 11 3
33 31
13 11 2
22 21
12 11 1
k k
k k
K
k k
k k
K
k k
k k
K
k k
k k
K
k k
k k
K
k k
k k
K
2 F
2
1
2
1 3
4
5
7
4
3
5
6
F
1 Y
F
1X
F
2 Y
F
2X
45
0
X
Y
49
[ ]
(
=
55 54
45 44 7
k k
k k
K
Vectorul deplasrilor nodale este :
{ } { }
5 5 4 4 3 3 2 2 1 1
v u v u v u v u v u
T
=
Vectorul forelor nodale este:
{ } { }
Y X Y X
T
F F F F F F
5 5 1 1
0 2 0 0 0 0 =
Ecuaia general a comportamentului structurii are matricea de rigiditate exprimat
prin intermediul submatricelor aferente nodurilor:
[ ] [ ] [ ] [ ]
[ ] [ ] [ ]
[ ] [ ] [ ] [ ]
[ ] [ ] [ ] [ ] [ ]
[ ] [ ] [ ]
(
(
(
(
(
(
5
5
4
4
3
3
2
2
1
1
55 54 53
45 44 43 42 31
35 34 33 31
24 22 21
14 13 12 11
5
5
1
1
5 4 3 2 1
0 0
0
0 0
0
5
4
3
2
1
0
2
0
0
0
0
v
u
v
u
v
u
v
u
v
u
K K K
K K K K K
K K K K
K K K
K K K K
F
F
F
F
F
Y
X
Y
X
4 4 4 4 4 4 4 8 4 4 4 4 4 4 4 7 6
Matricea structurii [ ]
str
K este format din submatrici care reprezint rigiditi de nod
[ ] [ ]...... ,
22 11
K K , rigiditi de linie [ ] [ ],...... ,
13 12
K K i termenii nuli.
Submatricele de forma [ ] [ ]...... ,
22 11
K K [ ]
55
K se obin prin nsumarea algebric a
termenilor corespunztori din matricele elementelor participante n nod.
De exemplu :
[ ]
2
K [ ]
5
K [ ]
6
K
[ ]
[ ]
[ ] [ ]
(
+
(
+
(
=
33 33
33
33
k k
k
K
n mod similar se obin i ceilali termeni. Sub form condensat ecuaia general a
comportrii structurii sub sarcin se scrie :
{ } [ ] { } =
str
K F
Observaii :
Matricea de rigiditate a structurii [ ]
str
K este simetric fa de diagonala principal;
Se constat pentru exemplul studiat c termenii 0 ai matricei de rigiditate a structurii
sunt localizai dup diagonala principal i dup diagonale secundare ; aceast
proprietate este rezultatul numerotrii nodurilor; n acest caz simplu numerotarea fiind
logic n ordinea nodurilor;
n cazul unei structuri complexe, din nenumrate elemente, este necesar a lua n
considerare modul de numerotare al nodurilor (diferena dintre numerele nodurilor s fie
50
minim); aceasta va duce la o matrice de rigiditate a structurii cu termenii 0 localizai
dup diagonala principal i la un numr limitat de diagonale secundare, deci la
micorarea benzii matricei de rigiditate (fig.2.34.).
[ ]
(
(
(
(
(
(
(
(
=
0
o
o o
o o o
o o o o
str
K
Fig.2.34. termeni 0
o termeni nuli = 0
Datorit simetriei matricei de rigiditate a structurii n memoria calculatorului se
stocheaz numai termenii cuprini ntre diagonala principal i din dreapta acesteia, de
unde apare avantajul evident al unei notri a nodurilor care s conduc la o grupare a
termenilor n vecintatea diagonalei principale, cu lime minim a semibenzii;
2.5. Condiii de sprijin
Matricea de rigiditate corespunztoare structurii din fig.2.34. este nul, matricele
elementale fiind nule:
[ ] [ ] [ ] 0
3 2 1
= = = K K K
Problema este static nedeterminat. Este necesar ca pentru fiecare direcie de deplasare
(n caz general de translaie sau rotaie), s fie anulat cel puin un grad de libertate.
Problemele analizate devin astfel static determinate.
Pentru exemplul studiat din fig.2.32. se introduce n nodul 1 ncastrare, fig.2.35.
Aceasta presupune impunerea condiiei pentru deplasarea nodului 1, u
1
=0. Aceast condiie
duce la imposibilitatea impunerii unei fore F
1
, valoarea creia va fi rezultatul aciunii
celorlalte fore: F
2
, F
3
i F
4
. Fora F
1
devine reaciunea introdus de ncastrare.
Reaciunea va apare ca o necunoscut suplimentar alturi de deplasrile u
2
, u
3
, u
4
.
Relund sistemul de ecuatii al structurii cu aceste condiii se obine:
Fig.2.35.
F
4
u
3
u
4
F
2
F
3
u
1
=0 u
2
2 1 3 4
H=F
1
51
=
(
(
(
(
4
3
2
1
44 43 42 41
34 33 32 31
24 23 22 21
14 13 12 11
4
3
2
1
0
u
u
u
u
k k k k
k k k k
k k k k
k k k k
F
F
F
F
Pentru rezolvarea sistemului se elimin liniile i coloanele corespunztoare deplasrii
cunoscute (impuse) i se rezolv sistemul astfel rezultat:
(
(
(
4
3
2
44 43 42
34 33 32
24 23 22
3
2
1
u
u
u
k k k
k k k
k k k
F
F
F
vectorul redus matricea de vectorul redus al
al forelor rigiditate redus deplasrilor
Din rezolvarea sistemului rezult: u
2,
u
3
, u
4
. Reaciunea nodului 1, H=F
1
se calculeaz
revenind la sistemul iniial, n care se introduc valorile calculate: u
2
, u
3
, u
4
, din sistemul
initial.
4 14 3 13 2 12 1
u k u k u k F + + =
Observaie :
La definirea condiiilor de sprijin, pentru evitarea erorilor, este necesar ca att structura
ct i elementele ce o compun s nu permit dect micri ale ansamblului posibile
corespunztor gradelor de libertate ale elementelor.
2.6. Calculul la nivel global. Mecanismul de asamblare a matricelor
elementare
Etapa de asamblare const n constituirea matricei de rigiditate a structurii [ ]
str
K ,
plecnd de la matricele elementelor [ ]
e
K .
Mecanismul asamblrii are loc n baza urmtoarei reguli practice: asamblarea
matricei de rigiditate a unei structuri se face adugnd bloc cu bloc submatricele de
rigiditate a fiecrui element, indicii liniilor i coloanelor corespunznd numerotrii
nodurilor fiecrui element.
Cu alte cuvinte, n matricea de rigiditate a structurii, pentru fiecare nod din structura
de elemente finite se aloc o linie, respectiv o coloan a cror lime cuprinde un numr de
sublinii sau subcoloane egal cu cel al gradelor de libertate ale nodului. Ordinea de notare a
elementelor finite este nesemnificativ.
Regula de asamblare este ilustrat n figura 2.36., n care se arat modul de asamblare
a diferitelor tipuri de elemente :
unidimensionale tip 1D - noduri: 1 - 4
bidimensionale tip 2D:
- triunghiular : nr.8 (noduri: 8-11-10);
- patrulater : nr.9 (noduri : 11-12-14-15);
52
Fig. 2.36. Asamblarea matricei de rigiditate a unei structuri
2 1
3
[ ]
(
(
(
=
10
11
8
10 11 8
6
K
8
1 13 15
12 16 14
3 6 9 12 15
14
2
5 8
1
4
7 10 13
11
1 3 5 7
9
E.F. patrulater
Sistem de notare: 11, 12, 15, 14
[ ]
(
(
(
(
=
14
15
12
11
14 15 12 11
9
K
E.F. triunghiular
Sistem de notare local: 1, 2, 3
Sistem de notare global: 8, 11, 10
[ ]
(
=
4
1
4 1
b
K
E.F. tip bar
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1
S-ar putea să vă placă și
- Informatica Manageriala - CursDocument117 paginiInformatica Manageriala - CursdumitritalÎncă nu există evaluări
- Subiect 29 Si 30 Mu AgregatDocument9 paginiSubiect 29 Si 30 Mu AgregatcselesÎncă nu există evaluări
- Subiecte 31, 32 Centre de Prelucrare Sis Sisteme FDocument17 paginiSubiecte 31, 32 Centre de Prelucrare Sis Sisteme Fcseles100% (1)
- Subiecte 25 - 27 Masini de DanturatDocument7 paginiSubiecte 25 - 27 Masini de DanturatcselesÎncă nu există evaluări
- Subiecte 20-24Document12 paginiSubiecte 20-24cselesÎncă nu există evaluări
- MaluDocument36 paginiMaluMarina AnițoiÎncă nu există evaluări
- Produs Servicii Prin Ingineria ValoriiDocument32 paginiProdus Servicii Prin Ingineria ValoriicselesÎncă nu există evaluări
- C 13 IngVal - Etape de Aplicare A Ing Valorii, GhidDocument13 paginiC 13 IngVal - Etape de Aplicare A Ing Valorii, GhidtejszinhabÎncă nu există evaluări
- Mef 6Document18 paginiMef 6cselesÎncă nu există evaluări
- 12 Studiul Constructiei Cinematicii Si Posibilitatilor Tehnologice La Masina ONA DBDocument3 pagini12 Studiul Constructiei Cinematicii Si Posibilitatilor Tehnologice La Masina ONA DBcselesÎncă nu există evaluări
- Mef 4Document14 paginiMef 4cselesÎncă nu există evaluări
- Eroziune ElectricaDocument13 paginiEroziune ElectricacselesÎncă nu există evaluări
- Mef 7Document14 paginiMef 7cselesÎncă nu există evaluări
- Marketing General Si IndustrialDocument112 paginiMarketing General Si IndustrialKis TundeÎncă nu există evaluări
- Plan de AfacereDocument9 paginiPlan de AfacerecselesÎncă nu există evaluări
- Rezumat InvestitiiDocument10 paginiRezumat InvestitiicselesÎncă nu există evaluări
- Informatica Manageriala - LucrariDocument39 paginiInformatica Manageriala - LucrariGabriel SanÎncă nu există evaluări
- Produs Servicii Prin Ingineria ValoriiDocument32 paginiProdus Servicii Prin Ingineria ValoriicselesÎncă nu există evaluări