Documente Academic
Documente Profesional
Documente Cultură
Mef 4
Încărcat de
cselesTitlu original
Drepturi de autor
Formate disponibile
Partajați acest document
Partajați sau inserați document
Vi se pare util acest document?
Este necorespunzător acest conținut?
Raportați acest documentDrepturi de autor:
Formate disponibile
Mef 4
Încărcat de
cselesDrepturi de autor:
Formate disponibile
28
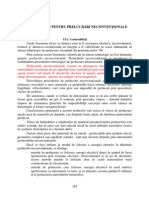
b. Element de bara cu noduri rigide (solicitat la ncovoiere plan - aparinnd unei
structuri plane)
Fig. 2.17. Element de bar aparinnd unei structuri tip cadru plan cu noduri rigide
- elementul de bar cu noduri rigide poate prelua eforturi transversale F
y
si momente
incovoietoare M
z
;
- numrul gradelor de libertate un 2 g.d.l. / nod: translaia dup axa y v, si rotatia
in jurul lui z ww ;
Se consider bara ncastrat din figura, solicitat la ncovoiere plan, de sarcinile
exterioare F i M. Matricea de rigiditate a elementului de bar se determin innd cont de
faptul c aceasta este inversa matricei de suplee:
[ ] [ ]
1
= K
Expresia matricei de suplee este:
[ ]
(
(
(
(
=
EI EI
EI EI
l l
l l
2
2 3
2 3
Rezult:
[ ] [ ]
[ ] ( )
(
(
(
(
=
(
(
(
(
= = =
l
l
l l
l l
l l
l
EI EI
EI EI
EI EI
EI EI
I E
K
4 6
6 12
3 2
2
12
2
2 3
3 2
2
4
2
1
n care:
- [ ]
*
este matricea asociat matricea transpus a complementelor algebrice ale
matricei iniiale;
- este determinantul asociat al matricei iniiale;
[ ]
(
(
(
(
=
(
=
EI EI
EI EI
M M
M M
3 2
2
3 2
2
22 21
12 11 *
l l
l l
( )
I E I E
M
l l
= =
+1 1
11
1 ; ( )
I E I E
M
2
1
2
2 1
2
12
l l
= =
+
F
2 1
E, I
M
x
v
1
v
x
ww
x
ww
1
2
l
x
y
O
29
( )
I E I E
M
2
1
2
2
1 2
2
21
l l
= =
+
; ( )
I E I E
M
3
1
3
3
2 2
3
22
l l
= =
+
( )
2
4 2 2 3
12
2 2 3
I E
I E I E I E I E
l l l l l
= =
Astfel, expresia matricei de rigiditate este:
[ ]
(
(
(
(
=
l l
l l
EI EI
EI EI
K
4 6
6 12
2
2 3
Comportamentul elementului sub sarcin, respectiv.- relaia de legtur ntre
sarcini i deplasrile produse de acestea -, se poate scrie :
)
`
(
(
(
(
=
)
`
2
2
2
2 3
4 6
6 12
ww
v
EI EI
EI EI
M
F
l
l
l l
sau:
{ } [ ] { } = K F
Observaie:
elementul de bar cu noduri rigide poate prelua att eforturi transversale, F
y
ct i
momente ncovoietoare M
z
;
numrul gradelor de libertate 2 g.d.l. / nod: translaia dup axa y - v i rotaie n jurul
axei z - ww;
Exprimarea matricei de rigiditate s-a facut pentru un nod, i anume nodul 2. Termenii
matricei de rigiditate reprezint fore sau cupluri produse de deplasri, - translaii,
respectiv rotaii unitare; aceti termeni s-ar obine impunnd cte o translaie, respectiv o
rotaie unitar nodului 2, ilustrat sugestiv n figura 2.18.; termenii vor corespunde
submatricei [K
22
]; (corespunztor acestor deplasri impuse vor lua natere i n nodul
opus reaciuni, determinate de modul de rezemare a elementului, ncastrri a celor
dou noduri );
[ ]
[ ] [ ]
[ ] [ ]
(
=
22 21
12 11
K K
K K
K
e
Fig.2.18.
z
y
1
6 EI / l
2
2 EI / l
4 EI / l
-6 EI / l
2
2 1
x x
y
1 2
1
6 EI / l
2
-12 EI / l
3
12 EI / l
3
-6 EI / l
2
z
30
numr nod 1 2
v
1
ww
1
v
2
ww
2
=
M
F
(
(
(
(
(
(
2
2
1
1
2
2 3
4 6
0 0
6 12
0 0
0 0 0 0
0 0 0 0
2
1
ww
v
ww
v
I E I E
I E I E
l l
l l
n acelai timp n nodul 1 iau natere reaciuni (Fig2.18.), care vor constitui termenii n
matricea de rigiditate corespunztoare nodului 1, determinate de modul de rezemare a
elementului, ncastrri a celor dou noduri; cu aceste valori se vor completa termenii
corespunztori submatricei [K
21
]:
[ ]
[ ] [ ]
[ ] [ ]
(
=
22 21
12 11
K K
K K
K
e
numr nod 1 2
v
1
ww
1
v
2
ww
2
=
M
F
0
0
(
(
(
(
(
(
2
2
1
1
2 2
2 3 2 2
4 6 2 6
6 12 6 12
0 0 0 0
0 0 0 0
2
1
ww
v
ww
v
I E I E I E I E
I E I E I E I E
l l l l
l l l l
c. Element de bara cu noduri rigide solicitat axial i ncovoiere plan (aparinnd unei
structuri plane)
Fig.2.19.
Se consider grinda ncastrat din fig.2.19.. solicitat n seciunea 2 dup trei direcii
(direciile g. d. l.) de sarcinile F
1 ,
F
2
, i M.
Sunt 3 g.d.l./nod:
translatii:
- dup x u;
- dup y v;
- rotaie n jurul lui z ww.
F
2
2 1
E, I
M
F
1
2 1 l
O
x
v
2
ww
2
y
u
2
31
Pentru acest element expresia matricei de suplee corespunztor relaiei demonstrate
este:
[ ]
(
(
(
(
(
(
=
EI EI
EI EI
EA
l l
l l
l
2
0
2 3
0
0 0
2
2 3
Se calculeaz matricea de rigiditate [K] ca fiind inversa matricei de suplee:
[ ] [ ]
[ ] ( )
( )
(
(
(
(
(
(
(
= = =
I E EA I E EA
I E EA I E EA
I E
I E EA
K
3 2
0
2
0
0 0
12
12
3 2
2 2
2
4
4
2
1
l l l l
l l l
l
l l
Rezult expresia matricei de rigiditate :
[ ]
(
(
(
(
(
(
=
l l
l l
l
I E I E
I E I E
EA
K
4 6
0
6 12
0
0 0
2
2 3
Relaia de legtur dintre sarcini i deplasrile produse de acestea se poate scrie:
(
(
(
(
(
(
2
2
2
2
2 3
2
1
4 6
0
6 12
0
0 0
ww
v
u
I E I E
I E I E
EA
M
F
F
l l
l l
l
vectorul forelor matricea de vectorul deplasrilor
rigiditate
Sub form condensat:
{ } [ ] { } K F =
Observaie:
Termenii matricei de rigiditate reprezint fore sau cupluri produse de deplasri, -
translaii, respectiv rotaii unitare; aceti termeni s-ar obine impunnd cte o translaie,
dup x respectiv dup y, i o rotaie unitar n jurul lui y, nodului 2; corespunztor acestor
32
deplasri impuse vor lua natere i n nodul opus reaciuni, determinate de modul de
rezemare a elementului, ncastrri a celor dou noduri (Fig.2.20.); cu valorile obinute se
va completa submatricea [K
22
], corespunztoare nodului 2 i submatricea [K
21
]
corespunztoare nodului 1;
Fig.2.20.
numr nod 1 2
numr nod 1 2
(
(
(
(
(
(
(
(
(
(
2
2
2
1
1
1
2 2
2 2 2 3
2
1
4 6
0
2 6
0
6 12
0
6 12
0
0 0 0 0
0 0 0 0 0 0
0 0 0 0 0 0
0 0 0 0 0 0
2
1
0
0
ww
v
u
ww
v
u
I E I E I E I E
I E I E I E I E
A E A E
M
F
F
o
l l l l
l l l l
l l
- E A/l E A/l
1
x
2
1
z
y
z
y
1
6 EI / l
2
2 EI / l
4 EI / l
-6 EI / l
2
2 1
x x
y
1 2
1
6 EI / l
2
-12 EI / l
3
12 EI / l
3
-6 EI / l
2
z
(
(
(
(
(
(
(
(
(
(
2
2
2
2
2 2
2
1
4 6
0 0 0 0
6 12
0 0 0 0
0 0 0 0 0
0 0 0 0 0 0
0 0 0 0 0 0
0 0 0 0 0 0
2
1
ww
v
u
I E I E
I E I E
A E
M
F
F
l l
l l
l
33
d. Element de baz cu dou noduri rigide solicitat la ncovoiere plan
Se consider elementul de bar delimitat de nodurile 1 i 2 solicitat dup dou direcii. n
fiecare nod exist:
- o deplasare transversal v;
- o rotaie a seciunii ww.
Fig.2.21.
Fig.2.22.
Fig.2.23.
x
w
1
v
1
w
2
v
2
x
y
F
y 1
F
y 2
M
1 x
M
1 y
1 2
x
y
v
2
ww
1
ww
2
v
1 F
y1
F
y2
M
z1 M
z2
1 2
x
y
2 1
M
1z
F
2y
F
1y
M
2z
E, A, l
x
v
2
v
1
ww
1
ww
2
2 1
1
y
-6 EI / l
2
4 EI / l
-6 EI / l
2
2 EI / l
1 2
x
z
1
2
y
6 EI / l
2
12 EI / l
3
-12 EI / l
3
6 EI / l
2
1
z
x
34
Ecuaia matriceal a comportrii sub sarcini a elementului bar cu dou noduri se
obine uor, innd cont de relaia obinut anterior, pentru un nod, prin asamblare,
respectnd ordinea logic de declarare a vectorilor for i deplasare (fiecare nod are dou
grade de libertate).
numr nod 1 2
=
z
y
z
y
M
F
M
F
2
2
1
1
(
(
(
(
(
(
(
(
(
2
2
1
1
2 2
2 3 2 2
2 2
2 2 2 3
4 6 2 6
6 12 6 12
2 6 4 6
6 12 6 12
2
1
ww
v
ww
v
I E I E I E I E
I E I E I E I E
I E I E I E I E
I E I E I E I E
l l l l
l l l l
l l l l
l l l l
Sub form condensat condensat ecuaia elementului finit cu dou noduri rigide
aparinnd unei structuri plane, solicitat la ncovoiere, este:
{ } [ ] { } =
e
K F
e. Element de baz cu dou noduri solicitat la ncovoiere plan si solicitare axiala
Se consider un elementul de bar delimitat de nodurile 1 i 2 solicitat dup trei direcii. n
fiecare nod exist:
Fig.2.24.
- o deplasare axial u;
- o deplasare transversal v;
- o rotaie a seciunii ww.
Ecuaia matriceal a comportrii sub sarcini a elementului bar cu dou noduri se
obine uor, innd cont de relaiile obinute anterior, pentru un nod, prin asamblare,
respectnd ordinea logic de declarare a vectorilor for i deplasare (fiecare nod are trei
grade de libertate).
x
y
u
1
u
2
ww
1
v
2
ww
2
v
1
F
y1
F
x1
F
y2
F
x2
M
z1
M
z2
1 2
x
u
1
u
2
1
2
w
1
v
1
w
2
v
2
y
F
x 2
F
x 1
F
y 1
F
y 2
x
M
1 x
M
1 y
35
Expresia matricei de rigiditate este:
numr nod 1 2
Fig.2.25.
[ ]
(
(
(
(
(
(
(
(
(
(
(
(
(
(
=
l l l l
l l l l
l l
l l l l
l l l l
l l
z z z z
z z z z
z z z z
z z z z
e
I E I E I E I E
I E I E I E I E
A E A E
I E I E I E I E
I E I E I E I E
A E A E
K
4 6
0
2 6
0
6 12
0
6 12
0
0 0 0 0
2 6
0
4 6
0
6 12
0
6 12
0
0 0 0 0
2
1
2 2
2 2 2 3
2 2
2 3 2 3
1
y
-6 EI / l
2
4 EI / l
-6 EI / l
2
2 EI / l
1 2
x
1
2
y
6 EI / l
2
12 EI / l
3
-12 EI / l
3
6 EI / l
2
1
z
x
z
x
1
E A/l -E A/l
y
2 1
- E A/l E A/l
1
x
2
1
z
y
z
y
1
6 EI / l
2
2 EI / l
4 EI / l
-6 EI / l
2
2 1
x x
y
1 2
1
6 EI / l
2
-12 EI / l
3
12 EI / l
3
-6 EI / l
2
z
36
Ecuaia matriceal a elementului finit cu dou noduri rigide este :
numr nod 1 2
Sub forma condensat ecuaia elementului finit cu dou noduri rigide aparinnd
unei structuri plane este:
{F} = [K
e
] {}
n care:
{F} - este vectorul forelor;
[K
e
] - este matricea de rigiditate a elementului;
{} - este vectorul deplasrilor;
Observaii:
Matricea de rigiditate a elementului finit este ptrat i simetric fa de diagonala
principal;
Ecuaia pentru acest tip de element finit se poate scrie :
[ ]
2
2
1
1
2
2
1
1
ww
v
ww
v
K
M
F
M
F
e
z
y
z
y
vectorul forelor matricea de rigiditate vectorul deplasrilor
a elementului
Termenii matricei se pot scrie sub form de sub matrici ptrate cu dimensiunea egal cu
numrul gradelor de libertate ale unui nod:
[ ]
[ ] [ ]
[ ] [ ]
(
=
22 21
12 11
K K
K K
K
e
In caz general matricea de rigiditate a elementului finit tip bar,cu nodurile i i j va
avea forma:
(
(
(
(
(
(
(
(
(
(
(
(
(
(
2
2
2
1
1
1
2 2
2 2 2 3
2 2
2 3 2 3
2
2
2
1
1
1
4 6
0
2 6
0
6 12
0
6 12
0
0 0 0 0
2 6
0
4 6
0
6 12
0
6 12
0
0 0 0 0
2
1
ww
v
u
ww
v
u
I E I E I E I E
I E I E I E I E
A E A E
I E I E I E I E
I E I E I E I E
A E A E
M
F
F
M
F
F
z z z z
z z z z
z z z z
z z z z
z
y
x
z
y
x
l l l l
l l l l
l l
l l l l
l l l l
l l
37
[ ]
(
=
jj ji
ij ii
e
k k
k k
K
n care:
k
ii
, k
jj
rigiditi de nod;
k
ij
= k
ji
rigiditi de linie;
f. Matricea de rigiditate a elementului de bar cu dou noduri rigide dintr-o structur
spaial
n fig.2.26. este reprezentat o bar cu noduri rigide aparinnd unei structuri spaiale.
Fiecare nod al barei are ase grade de libertate : trei translaii de-a lungul axelor sistemului de
referin local u, v, i w i trei rotaii n jurul acelorai axe: uu, vv, ww.
n fiecare nod pot exista trei fore, dup direciile axelor: F
x
, F
y
i F
z
i trei momente n
jurul axelor: M
x
, M
y
i M
z
.
Fig.2.26.
Problema spaial se trateaz succesiv n dou etape:
1). bara cu noduri rigide ntr-o structur plan ncrcat n planul ei ( bar de cadru
plan);
2). bara cu noduri rigide ntr-o structur plan ncrcat normal pe plan;
Urmeaz apoi suprapunerea logic a celor dou situaii, prin asamblarea ecuaiilor
matriceale obinute respectnd ordinea logic de declarare a vectorilor for i vectorilor
deplasare.
v
2
w
1
ww
2
uu
1
uu
2
vv
2
u
2
u
1
vv
1
w
2
v
1
ww
1
2 1
x
z
y
E, G, A, l, I
z
, I
y
, I
t
F
2y
F
1z
M
2z
M
1x
M
2x
M
2y
F
2x
F
1x
M
1y
F
2z
F
1y
M
1z
2 1
x
z
y
38
1). Bar cu noduri rigide ntr-o structur plan ncrcat n planul ei ( bar de cadru plan)
Fiecare nod are trei grade de libertate: dou translaii dup axele Ox i Oy, care
definesc planul structurii, u i v, i o rotaie n jurul axei normale pe acest plan: ww.
Celor trei deplasri le corespund trei eforturi: fora axial F
x
, fora tietoare F
y
, i momentul
ncovoietor M
z
.
Pentru generarea matricei de rigiditate se impune succesiv, n ordine logic,
corespunztor gradelor de libertate, translaii unitare de-a lungul axei Ox, respectiv, Oy i o
rotaie unitar n jurul axei Oz.
Fig.2.27.
n matricea de rigiditate se genereaz astfel succesiv liniile, a cror termeni vor
reprezenta forele (momentele) care produc deplasrile (rotirile) unitare.
Ecuaia sub form matriceal va fi:
z
x
1
E A/l -E A/l
y
2 1
- E A/l E A/l
1
x
2
1
z
x
y
1 2
1
6 EI
z
/ l
2
-12 EI
z
/ l
3
12 EI
z
/ l
3
-6 EI
z
/ l
2
z
y
6 EI
z
/ l
2
12 EI
z
/ l
3
-12 EI
z
/ l
3
6 EI
z
/ l
2
z
1
2
1
x
1
y
-6 EI
z
/ l
2
4 EI
z
/ l
-6 EI
z
/ l
2
2 EI
z
/ l
1 2
x
z z
y
1
6 EI
z
/ l
2
2 EI
z
/ l
4 EI
z
/ l
-6 EI
z
/ l
2
2 1
x
39
numr nod 1 2
(
(
(
(
(
(
(
(
(
(
(
(
(
2
2
2
1
1
1
2 2
2 2 2 3
2 2
2 3 2 3
2
2
2
1
1
1
4 6
0
2 6
0
6 12
0
6 12
0
0 0 0 0
2 6
0
4 6
0
6 12
0
6 12
0
0 0 0 0
2
1
ww
v
u
ww
v
u
I E I E I E I E
I E I E I E I E
A E A E
I E I E I E I E
I E I E I E I E
A E A E
M
F
F
M
F
F
Z Z Z Z
Z Z Z Z
Z Z Z Z
Z Z Z
Z
Y
X
Z
Y
X
l l l l
l l l l
l l
l l l l
l l l l
l l
2). Bara cu noduri rigide ntr-o structur plan ncrcat normal pe plan
n acest caz fiecare nod are trei grade de libertate: o translaie dup axa Oz w i dou
rotaii n jurul axelor Ox uu i Oy vv. Planul structurii este definit de axele x i z. Celor
trei deplasri (translaii - rotaii) le corespund trei eforturi: fora tietoare F
z
, momentul de
torsiune M
x
i momentul ncovoietor M
y
.
40
Fig.2.28.
Pentru generarea matricei de rigiditate se procedeaz similar ca i n cazul a, respectiv
se impune succesiv corespunztor gradelor de libertate: translaie unitar de-a lungul axei Oz
i rotaii unitare n jurul axelor Ox i Oy.
Ecuaia matriceal a comportrii va fi:
numr nod 1 2
(
(
(
(
(
(
(
(
(
(
(
(
(
(
2
2
2
1
1
1
2 2
2 3 2 3
2 2
2 3 2 3
2
2
2
1
1
1
4
0
6 2
0
6
0 0 0 0
6
0
12 6
0
12
2
0
6
4
0
6
0 0 0 0
6
0
12 6
0
12
2
1
vv
uu
w
vv
uu
w
I E I E I E I E
I G I G
I E I E I E I E
I E I E
I E
I E
I G I G
I E I E I E I E
M
M
F
M
M
F
Y Y Y Y
t t
Y Y Y Y
Y Y
y
Y
t t
Y Y Y Y
y
x
z
y
x
z
l l l l
l l
l l l l
l l l l
l l
l l l l
1
-6 EI
y
/ l
2
4 EI
y
/ l
-6 EI
y
/ l
2
2 EI
y
/ l
x
1
6 EI
y
/ l
2
2 E I
y
/ l
4 EI
y
/ l
-6 EI
y
/ l
2
2 1
x
z
x
12 EI
y
/ l
3
6 EI
y
/ l
2
6 EI
y
/ l
2
-12 EI
y
/ l
3
1
1 2
12 EI
y
/ l
3
6 EIy / l
2
1 2
-6 EI
y
/ l
2
-12 EI
y
/ l
3
x
1
z
- G I
t
/l G I
t
/l
x
2
1
z
y
G I
t
/l
G I
t
/l
x
z
y
2
1
1
41
Ecuaia elementului finit tip bar cu noduri avnd fiecare cte ase grade de libertate
se obin prin asamblarea celor dou ecuaii constituite n cele dou plane, respectnd
ordinea logic a vectorilor for i a vectorilor deplasare.
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
2
2
2
2
2
2
1
1
1
1
1
1
2 2
2 2
2 3 2 3
2 3 2 3
2 2
2 2
2 3 2 3
2 3 2 3
2
2
2
2
2
2
1
1
1
1
1
1
4 6 2 6
4 6 2 6
6 12 6 12
6 12 6 12
2 6 4 6
2 6 4 6
6 12 6 12
6 12 6 12
ww
vv
uu
w
v
u
ww
vv
uu
w
v
u
I E I E I E I E
I E I E I E I E
I G I G
I E I E I E I E
I E I E I E I E
EA EA
I E I E I E I E
I E I E I E I E
I G I G
I E I E I E I E
I E I E I E I E
EA EA
M
M
M
F
F
F
M
M
M
F
F
F
Z Z Z Z
Y Y Y Y
t T
Y Y Y Y
Z Z Z Z
Z Z Z Z
Y Y Y Y
Z Z
Y Y Y Y
Z Z Z Z
Z
Y
X
Z
Y
X
Z
Y
X
Z
Y
X
l l l l
l l l l
l l
l l l l
l l l l
l l
l l l l
l l l l
l l
l l l l
l l l l
l l
vectorul forelor matricea de rigiditate a elementului vectorul deplasrii
S-ar putea să vă placă și
- Subiecte 20-24Document12 paginiSubiecte 20-24cselesÎncă nu există evaluări
- Subiect 29 Si 30 Mu AgregatDocument9 paginiSubiect 29 Si 30 Mu AgregatcselesÎncă nu există evaluări
- Subiecte 25 - 27 Masini de DanturatDocument7 paginiSubiecte 25 - 27 Masini de DanturatcselesÎncă nu există evaluări
- Subiecte 31, 32 Centre de Prelucrare Sis Sisteme FDocument17 paginiSubiecte 31, 32 Centre de Prelucrare Sis Sisteme Fcseles100% (1)
- Produs Servicii Prin Ingineria ValoriiDocument32 paginiProdus Servicii Prin Ingineria ValoriicselesÎncă nu există evaluări
- MaluDocument36 paginiMaluMarina AnițoiÎncă nu există evaluări
- C 13 IngVal - Etape de Aplicare A Ing Valorii, GhidDocument13 paginiC 13 IngVal - Etape de Aplicare A Ing Valorii, GhidtejszinhabÎncă nu există evaluări
- Mef 7Document14 paginiMef 7cselesÎncă nu există evaluări
- Rezumat InvestitiiDocument10 paginiRezumat InvestitiicselesÎncă nu există evaluări
- 12 Studiul Constructiei Cinematicii Si Posibilitatilor Tehnologice La Masina ONA DBDocument3 pagini12 Studiul Constructiei Cinematicii Si Posibilitatilor Tehnologice La Masina ONA DBcselesÎncă nu există evaluări
- Mef 6Document18 paginiMef 6cselesÎncă nu există evaluări
- Mef 5Document12 paginiMef 5cselesÎncă nu există evaluări
- Marketing General Si IndustrialDocument112 paginiMarketing General Si IndustrialKis TundeÎncă nu există evaluări
- Eroziune ElectricaDocument13 paginiEroziune ElectricacselesÎncă nu există evaluări
- Plan de AfacereDocument9 paginiPlan de AfacerecselesÎncă nu există evaluări
- Informatica Manageriala - LucrariDocument39 paginiInformatica Manageriala - LucrariGabriel SanÎncă nu există evaluări
- Produs Servicii Prin Ingineria ValoriiDocument32 paginiProdus Servicii Prin Ingineria ValoriicselesÎncă nu există evaluări
- Informatica Manageriala - CursDocument117 paginiInformatica Manageriala - CursdumitritalÎncă nu există evaluări