Documente Academic
Documente Profesional
Documente Cultură
Cap 03 Conditii de Autoprop
Cap 03 Conditii de Autoprop
Încărcat de
NorbertDrepturi de autor
Formate disponibile
Partajați acest document
Partajați sau inserați document
Vi se pare util acest document?
Este necorespunzător acest conținut?
Raportați acest documentDrepturi de autor:
Formate disponibile
Cap 03 Conditii de Autoprop
Cap 03 Conditii de Autoprop
Încărcat de
NorbertDrepturi de autor:
Formate disponibile
36
DINAMICA AUTOVEHICULELOR Indrumar de proiectare
3
DEFINIREA CONDIIILOR DE AUTOPROPULSARE
Deplasarea autovehiculului n condiiile cerute de performane n ceea ce
pivete dinamicitatea, consumul de combustibil, sigurana i confortul cltoriei,
cerine ce impun anumite reguli i elemente constructive, presupune cunoaterea
influenelor exterioare ce se opun naintrii autovehiculului.
Definirea condiiilor de autopropulsare, care precede calcul de traciune,
mpreun cu care condiioneaz performanele autovehiculului, cuprinde
precizarea, funcie de tipul, caracteristicile i destinaia autovehiculului, a cauzelor
fizice pentru forele de rezisten ce acioneaz asupra autovehiculului, a factorilor
specifici de influen i stabilete relaiile analitice de evaluare cantitativ a acestor
fore.
n procesul autopropulsrii autovehiculului, asupra acestuia acioneaz, dup
direcia vitezei de deplasare, dou tipuri de fore:
fore active forele care au acelai sens cu cel al vitezei de deplsare;
forele de rezisten forele care sunt de sens opus sensului vitezei de
deplasare.
Forele de rezisten, cunoscute sub denumirea de rezistene la naintare sunt
urmtoarele:
rezistena la rulare este o for ce se opune naintrii autovehiculului i
este determinat de fenomenele ce se produc la rularea roilor pe calea de
rulare;
rezistena aerului este o for ce se opune naintrii autovehiculului i
este datorat interaciunii dintre autovehiculul n micare i aerul
considerat n repaus;
rezistena pantei este o for dotorat nclinrii longitudinale a drumului
i reprezint o for de rezisten la urcarea pantelor, i o for activ la
coborrea pantelor;
rezistena la demaraj este o for datorat ineriei autovehiculului n
micare i reprezint o for de rezisten n timpul micrii accelerate i
do for activ n regimul micrii decelerate.
Micarea autovehiculului, consecin a aciunii asupra lui a forelor active i de
rezisten poate fi:
micare uniform (cu vitez constant);
micare accelerat (viteza crete) regim numit regimul demarrii;
micare decelerat (viteza scade); aceste regim poate fi realizat prin rulare
liber, cnd regimul decelerat este datorat ncetrii aciunii forei de
traciune i prin frnare, cnd regimul decelerat este datorat aciunii forei
de frnare dezvoltat la roile automobilului.
37
DINAMICA AUTOVEHICULELOR Indrumar de proiectare
Autopropulsare autovehiculului se datoreaz energiei mecanice primite de
roile motoare de la motorul autovehiculului i este posibil cnd aceast energie
este n concordan cu necesarul de momente i puteri pentru nvingerea
rezistenelor la naintare. De aici rezult ca deosebit de important n definirea
condiiilor de autopropulsare cunoaterea, pentru fiecare din rezistenele la
naintare, a cauzelor fizice care le genereaz, a principalelor mrimi i factori de
influen i a posibilitilor de evaluare analitic,
3.1. Rezistena la rulare
3.1.1. Generarea rezistenei la rulare
Rezistena la rulare, Rr, este o fora cu aciune permanent datorat exclusiv
rostogolirii roilor pe cale, i este de sens opus sensului de deplasare al
automobilului.
Cauzele fizice ale rezistenei la rulare sunt:
deformarea cu histerezis a pneului;
frecrile superficiale dintre pneu i cale;
frecrile din lagrele butucului roii;
deformarea cii de rulare;
percuia dintre elementele benzii de rulare i microneregularitile cii de
rulare;
efectul de ventuzare produs de profilele cu contur nchis de pe banda de
rulare pe suprafaa neted a cii de rulare.
ntre cauzele amintite mai sus, n cazul autoturismelor care se deplaseaz
pe ci rigide, netede, aderente ponderea important o are deformarea cu
histerezis a pneului.
Ca urmare a modului de distribuire a presiunilor n pata de contact dintre pneu
i cale cenrtul de presiune al amprentei este deplasat n faa centrului contactului
cu mrimea a(fig. 3.1.a).
a)
b)
Fig. 3.1. Aciunea momentului de rezisten la rulare asupra unei roi motoare
a) rezultanta forelor din pata de contact Z; b) reducerea reaciunii normale Z (punctul O p).
38
Definirea condiiilor de autopropulsare
Din condiia de echilibru a roii libere (roate care ruleaz sub aciunea unei
fore de mpingere Rr) apicnd metoda izolrii corpurilor prin desfacerea legturilor
ei cu calea i automobilul, se obine o for tangenial sub form:
a
M Or 0 X Z
rr
(3.1)
unde: rr este raza de rulare a roii;
Z reaciunea normal dintre pneu i cale;
Notnd produsul
Mrul a Z
(3.2)
care reprezint momentul rezistenei la rulare (fig.3.1.b) expresia forei datorate
rostogolirii roii pe cale devine:
Rr
Mrul
a
Z
rd
rd
(3.3)
Aceast for, generat de deplasarea suportului reaciunii normale fa de
verticala centrului roii de numete rezistena la rulare Rr i reprezint fora cu care
roata se opune deplasrii n sensul i direcia vitezei automobilului.
Deoarece determinarea deplasrii a este dificil, ea fiind n acelai timp o
mrime cu o valoare dat pentru un pneu dat n condiii precizate de micare,
pentru calcul rezistenei la rulare este preferabil folosirea unei mrimi relative,
avnd natura unui criteriu de similitudine, care permite extinderea utilizrii sale n
condiii mai generale. Aceast mrime este coeficientul rezistenei la rulare f dat de
relaia:
a
f
(3.4)
rd
3.1.2. Factori de influen asupra rezistenei la rulare.
Principalii factori care influeneaz rezistena la rulare sunt:
- viteza de deplasare a autovehiculului;
- caracteristicile constructive ale pneului;
- presiunea interioar a aerului din pneu;
- sarcina normal pe pneu;
- tipul i starea cii de rulare;
- forele i momentele aplicate roilor.
Evaluarea prin experiment a unuia dintre factori nu este posibil deoarece toi
parametrii de mai sus definesc pneul n timpul rulrii lui.
3.1.3. Calculul rezistenei la rulare.
Se constat c multitudinea de factori amintii mai sus face dificil
determinarea cu exactitate a coeficientului rezistenei la rulare n orice moment al
rulrii roii, de accea apare necesitatea utilizrii unor relaii/seturi de relaii empirice
pentru determinarea acestui coeficient. Exprimarea acestora este divers prin
numrul i calitatea mrimilor de intrare.
39
DINAMICA AUTOVEHICULELOR Indrumar de proiectare
Pentru calculele inginereti simple se poate adopta valoarea coeficientului
rezistenei la rulare n funcie de calitatea drumului pe care se deplaseaz
autovehiculul, dup recomandrile din tabelul 3.1.
Tabelul 3.1. Valori medii ale coeficientului rezistenei la rulare.
Natura cii
Asfalt sau beton
osea pietruit
osea pavat
Drum de pmnt
Starea cii
bun
satisfacatoare
bun
stare bun
cu hrtoape
uscat bttorit
dup ploaie
desfundat
Drum cu gheat sau ghea
Drum cu zpad
afnata
bttorit
Coeficientul de rezisten la rulare
0,015-0,018
0,018-0,022
0,020-0,025
0,025-0,030
0,035-0,050
0,025-0,035
0,050-0,150
0,100-0,250
0,015-0,030
0,07-0,100
0,03-0,05
n situaia n care este necesar determinarea puterii necesare autopropulsrii
autovehiculului cu viteza maxim pentru situaia deplasrii pe un drum din asfalt
sau beton coeficientul rezistenei la rulare poate fi determinat cu ajutorul graficului
din figura 3.2.
Fig.3.2. Determinarea coeficeintului rezistenei la rulare
Pentru a se studia modul n care rezistena la rulare influeneaz
comportamentul dinamic al autovehiculului de proiectat pentru determinarea
coeficientului rezistenei la rulare se pot folosi diverse relaii empirice de calcul.
Cele mai simple dintre formule utilizate pun n eviden viteza de deplasare
sub forma [XX]:
40
Definirea condiiilor de autopropulsare
(3.5)
fR f0 f01 V f02 V 2 f03 V 3
unde f0 este coeficientul de rezisten la rulare pentru vitez nul, i f oj, j=1,2,3 sunt
coeficieni dintre care unii pot fi nuli. Ca exemplificare se prezint n valori ale
acestor coeficieni (tabelul 3.2)
Tipul pneului
Radial
Radial
Cord metalic
Cord textil
Seciune
foarte joas
Seciunea
joas
Superbalon
Tabelul 3.2. Parametrii pentru calculul coeficientului de rezisten la rulare.
f0
h2
h3
h
f01,
f02 ,
f03 ,
km
km
km
1,3295 10 2 2,8664 10 5 1,8036 10 7
1,3854 10
1,6115 10
0,00
0,00
0,00
1,6110 10 2 1,0002 10 5 2,9152 10 7
0,00
1,21337 10 1,6830 10
9,9130 10
2,3214 10
1,8360 10 2 1,8725 10 5 2,9554 10 7 0,00
Tot o relaie n care este pus n eviden numai viteza de deplasare este[xx]:
V
fr,4
100
km
/
h
fr fr ,0 fr,1
100
km
/
h
(3.6)
ai crei coeficieni se aleg cu ajutorul diagramelor din figura 3.3.
Figura 3.3. Coeficienii fr,0, fr,1, fr,4
O alt relaie de calcul este [XX]:
100
fr 0,0125 0,0085
sau [xx}:
(3.7)
41
DINAMICA AUTOVEHICULELOR Indrumar de proiectare
2,5
V
(3.8)
100
unde v este in km/h iar coeficienii se aleg cu ajutorul diagramei din figura 3.4
fr f 0 f s
Fig.3.4. Coeficienii f0, fs
Pentru cazul n care se consider i presiunea din pneu relaiile de calcul sunt
[XX}:
202 10 4
V 3,7
(3.9)
p i0,64
0,778 10 9 p i2,03
sau pentru determinarea direct a puterii necesare pentru nvingerea rezistenei la
rulare a rotii [XX]:
20
3,7 V
V
Prul 0,64
(3.10)
3
2,08
p
12,94 10 pi
i
3,6
n figura 3.5 sunt reprezentate valorile obinute prin evaluarea coeficientului
rezistenei la rulare cu ajutorul relaiilor (3.5), (3.6), (3.7), (3.8)
Relaia (3.5) devine dup alegea coeficienilor:
fr 1,3295 10 2 2,8664 10 5 V 1,8036 10 7 V 2 0 V 3 ;
relaia (3.6) devine:
V
0,06 10 2
fr 0,775 10 2 0,25 10 2
100
km
/
h
relaia (3.8) devine:
V
.
100 km / h
fr 0,012 0,007
100
km
/
h
42
Definirea condiiilor de autopropulsare
Fig.3.5. Variaia coeficientului rezistenei la rulare
n funcie de viteza de deplasare a autovehiculului
Cu excepia rezultatelor obinute cu ajutorul relaiei (3.7) se constat pentru
relaiile (3.5), (3.6), (3.8) o bun similitudine ntre rezultatele obinute.
Astfel pentru determinarea coeficientului rezistenei la rulare se recomand
utilizarea uneia dintre relaiile (3.5), (3.6), (3.8), n funcie de datele cunoscute legat
de alegerea coeficienilor acestor expresii.
Pentru ntreg automobilul relaiile de calcul ale forei i puterii necesare
nvingerii rezistenei la rulare sunt:
Nr
Rr
f Z
i
ri
[daN]
(3.11)
i1
unde i=1,2Nr; fi este coeficientul rezistenei la rulare pentru roata i, Z ri este
reaciunea normal la roata i, iar Nr este numrul de roi al autovehiculului.
Date fiind dificultile utilizrii relaiei (3.11.) se consider f=f I=const.
Astfel relaia devine:
Nr
Rr f
ri
f Ga cos [daN]
(3.12)
i 1
unde Ga este greutatea autovehiculului iar este unghiul de nclinare longitudinal
a drumului.
Puterea necesar nvingerii acestei rezistene se calculeaz cu relaia:
Pr f G a cos v [kW]
(3.13)
unde v este viteza exporimat n m/s sau:
43
DINAMICA AUTOVEHICULELOR Indrumar de proiectare
Pr
f G a cos V
[kW]
360
(3.14)
unde V este viteza autovehiculului exprimat n km/h.
3.2. Rezistena aerului.
3.2.1. Noiuni de aerodinamica autovehiculului.
Aerodinamica autovehiculelor se ocup de fenomenele care se produc la
interaciunea dintre autovehicul i aerul nconjurtor i folosete principiile generale
ale aerodinamicii teoretice. In cadrul aerodinamicii autovehiculelor se stabilesc
forele i momentele ce acioneaz, din partea aerului n repaus sau n micare,
asupra autovehiculelor aflate n miare. De asemenea se analizeaz cile de
modificare a interaciunii dintre aer i autovehicul astfel nct s se mbunteasc
performanele acestora.
Aerodinamica autovehiculelor studiaz cu precdere urmtoarele aspecte:
rezistena la naintare datorat aerului i cile pentru micorarea acesteia;
efectele interaciunii cu aerul asupra stabilitii autovehiculelor i metode
de mbuntirea stabilitii aerodinamice;
efectele interaciunii cu aerul asupra aderenei autovehiculelor cu calea de
rulare i metode de cretere a acesteia;
micarea aerului n interiorul autovehiculului i alegerea adecvat a
diferitelor orificii de absorbie i evacuare a aerului n vederea ventilrii
caroseriei i a rcii diferitelor organe.
Curgerea curentului de aer pe lng caroseria autovehiculului este modelat
de legtura dintre presiune i vitez exprimate de ecuaia lui Bernoulli:
p static p dinamic p total
(3.15)
sau:
1
(3.16)
v 2 pt
2
unde: este densitatea aerului;
v - viteza aerului (relativ fa de autovehicul).
La contactul cu corpul caroseriei autovehiculului curentul de aer se desparte: o
parte va trece pe
deasupra, o alta parte
printre caroserie i calea
de rulare iar o a treia
parte a curentului de aer
va lovi corpul caroseriei.
Dac
se
presupune ns c la
contactul dintre aer i
suprafaa caroseriei nu
exist frecare atunci
scderea de presiune se
transform n cretere
Fig.3.6. Distribuia de presiune n lungul seciunii longitudinale.
ps
44
Definirea condiiilor de autopropulsare
de vitez.Ins. la contactul cu caroseria viteza aerului (considerat n micare
laminar) scade brusc la zero datorit frecrii aprnd astfel o variaie a presiunii
(fig 3.6).
Acest fenomen determin rezistena la naintare datorat interaciunii cu aerul.
Fiind inevitabil se ncearc realizarea unor forme optime ce presupun resurse
minime pentru invingerea acestei rezistene.
Sedan
Coupe
czs = 0.246
czf = 0.136
czs = 0.279
czf = 0.133
cx = 0.358
cx = 0.358
Fastback
Station Wagon
czs = 0.118
czf = 0.135
czs = 0.063
czf = 0.116
cx = 0.315
cx = 0.33
Fig.3.7. Rezistenele normale i longitudinale pentru diferite modele de caroserie
3.2.2. Influena formei autovehiculului asupra aerodinamicii sale.
Pentru a urmri aceast influena se consider corpuri simple i corpuri de
caroserie pentru care au fost determinai coeficienii rezistenei aerului cx.
cx = 1.95
cx = 1.42
cx = 0.32
cx = 0.007
cx = 0.85
cx = 0.45
cx = 0.50
cx = 0.32
Fig.3.8. Influena formei asupra coeficeintului rezistenei aerodinamice.
45
DINAMICA AUTOVEHICULELOR Indrumar de proiectare
Acest coeficient cx este strnns legat de forma corpului i de aceea modificri
ale diferitelor detalii sau componente ale caroseriei permit micorarea acestuia,
aceasta fr a afecta imaginea de ansamblu a autovehiculului.
Cx
forma optim
forma originala
Forma
modificrile efectuate
Fig.3.9. Optimizarea detaliilor constructive
Utilizarea razelor de racordare dintre diferitele elemente ale caroserie poate
duce la optimizarea coeficientului rezistenei aerului.
Fig.3.10. Influena razelor de racord ale caroserie (din [xx]).
Definirea condiiilor de autopropulsare
46
De asemenea proporia ntre dimensiunile de gabarit ale autovehicului poate
produce o modificare a acestui coeficient.
Fig.3.11. Influena dimensiunilor de gabarit ale caroseriei (din [xx]).
Prezentarea evoluiei formei autovehiculelor precum i a valorilor ceoficeintului
rezistenei aerului ofer informaii legate de alegerea coeficientului rezistenei
aerului ce caracterizeaz autovehiculul de proiectat.
Fig.3.12. Evoluia formei autovehiculului (din [xx]).
47
DINAMICA AUTOVEHICULELOR Indrumar de proiectare
3.2.3. Calculul rezistenei aerului.
Pentru calculul rezistenei se recomand utilizarea relaie:
1
(3.17)
cx A v2
2
unde: - este densitatea aerului: =1,225 kg/m3 ( p 101 33 10 3 [N/m2] i
T=288 K)
cx coeficientul de rezisten al aerului;
A aria seciunii transversale maxime;
v viteza de deplasare a autovehiculului [m/s].
Aria transversal maxim se determin cu suficient precizie (erori sub 5%)
dup desenul de ansamblu al automobilului n vedere frontal utiliznd relaia:
(3.18)
A B H
unde: B este ecartamentul autovehiculului [m];
H este naltimea autovehiculului [m].
Ra
Valori medii ale parametrilor aerodinamici sunt prezentate n tabelul 3.3.
Tipul autovehiculului
Automobil sport
Autoturism cu caroseria nchis
Autoturism cu caroseria deschis
Autobuz
Autocamion cu plaform deschis
Autotren rutier, cu dou elemente caroserie
platform
Autofurgon
Autotren rutier cu dou elemente coroserie
furgon
Tabelul 3.3. Valori medii ale parametrilor aerodinamici
A [m]
Cx
1,0-1,3
0,2-0,25
1,6-2,8
0,3-0,5
1,5-2,0
0,65-0,8
3,5-7,0
0,7-0,8
3,0-5,3
0,9-1,0
4,0-5,3
1,0-1,25
3,5-8,0
0,6-0,75
7,0-8,0
0,95-1,0
3.3. Rezistena la pant.
La deplasarea autovehiculului pe ci cu nclinare longitudinal,fora de
greutate genereaz o component Rp dup direcia deplasrii dat de relaia :
R p ma g sin
(3.19)
Aceast for este for de rezisten la urcarea pantelor (de sens opus vitezei
de deplasare) i for activ la coborrea pantelor.
Pentru pante cu nclinri mici ( 17 ) la care eroarea aproximrii
sin tg este sub 5% panta se exprim n procente: p% tg .
n acest caz expresia rezistenei la pant este dat de relaia:
R p Ga p
(3.20)
Alegerea unghiului de nclinare longitudinal a cii se face funcie de tipul i
destinaia automobilului (tabelul 3.4).
48
Definirea condiiilor de autopropulsare
Tabelul 3.4. Valori medii si maxime ale unghiului de nclinare longitudinal a cii
Tipul autovehiculului
Valori medii
Valori maxime admise
Autovehicule cu o singur punte motoare
17-19
22
Autovehicule cu dou puni motoare
28-32
35
Deoarece rezistena la rulare ct i rezistena la pant sunt determinate de
starea i caracteristicile cii de rulare, se folosete gruparea celor dou fore ntr-o
for de rezisten total a cii R , dat de relaia
R R r R p G a f cos sin G a
(3.21)
unde f cos sin este coeficientul rezistenei totale a cii de rulare.
3.4. Rezistena la demarare.
Regiurile tranzitorii ale micrii autovehiculului sunt caractrizate de sporiri ale
vitezei (demarri) i reduceri ale vitezei (frnri). Rezistena la demarare (R d) este
o for de rezisten ce se manifest n regimul de micare accelerat a
autovehiculului.
Ca urmare a legturilor cinematice determinate n lanul cinematic al
transmisiei dintre motor i roile motoare, sporirea vitezei de translaie a
autovehiculului se obine prin sporirea vitezelor unghiulare de rotaie ale
elementelor transmisiei i roilor. Masa autovehiculului n micare de translaie
capt o acceleraie liniar iar piesele n rotaie acceleraii unghiulare.
Influena asupra ineriei n translaie a pieselor aflate n rotaie se face printr-un
coeficient , numit coeficientul de influen al maselor n micare de rotaie.
Rezistena la demarare este astfel dat de relaia:
dv
(3.22)
dt
unde: ma este masa autovehiculului [kg]
este coeficientul de influen al maselor aflate n micare de rotaie;
dv
a acceleraia micrii de translaie a autovehiculului [m/s2].
dt
Pentru calculul rezistenei la demarare este necesar cunoaterea mrimii
coeficientului de influen al maselor n micare de rotaie.
Ca metode de alegere a mrimii coeficientului de influen a pieselor n
micare de rotaie, bibliogafie se specialitate recomanda mai multe metode:
a) utilizarea dac se dispune de studiul soluiilor similare a valorilor
corespunztoare autovehiculelor cu caracteristicile cele mai apropiate.
n acest caz se estimeaz pe baza schemei din figura 3.13. valoarea n prima
treapt cu relaia:
R d ma
1 1
2
2
IR
1
Ima i CV 1 i 0
t
ma
ma
rr2
rr2
(3.23)
unde: Im+a este momentul masic de inerie al pieselor motorului i al ambreiajului
reduse la arborele primar al cutiei de viteze;
IR este momentul masic de inerie al unei roi;
49
DINAMICA AUTOVEHICULELOR Indrumar de proiectare
icv1 este raportul de transmitere al primei trepte de vitez din cutia de
viteze;
i0 este raportul de transmitere al transmisiei principale;
t este randamentul transmisiei;
rr este raza de rulare a roilor.
Fig.3.13. Modelul dinamic simplificat al autovehiculului
Pentru celelalte trepte, grupnd constantele se obine relaia de calcul:
2
(3.24)
k 1 M iCVk
R
cu :
i:
IM i02
t
ma rr2
ma
(3.25)
1
rr2
(3.26)
b) Utilizarea de valori medii funcie de tipul i caracteristicile automobilului din
datele statistice cuprinse n tabelele 3.5, 3.6 sau figura 3.14
Tipul autovehiculului
Autoturisme
Autobuze, autocamioane
Tipul autovehiculului
Autoturisme
Autobuze, autocamioane
Momente de inerie
Im+a
IR
0,2-0,7
2,0-6,0
0,4-0,9
3-15
icv1
i0
Tabelul 3.5.
1
3-4
6-8
3-4
4-7
1,2-1,4
1.8-2,7
Tabelul 3.6. Valori ale coeficitenilor maselor n rotaie
icv1
M
R
0,02-0,04
0,02-0,03
3-4
0,02-0,04
0,03-0,05
6-8
c) Pentru autoturisme se poate utliza relaia de calcul:
50
Definirea condiiilor de autopropulsare
k 1,04 0,0025 ik2 i 02
unde:
(3.27)
i k este raportul de transmitere al treptei cuplate n cutia de viteze ;
i 0 este raportul de transmitere al transmisiei principale.
Fig.3.14. Recomandri de alegere a valorilor coeficienilor de influen
a maselor n micare de rotaie.
n privina acceleraiilor, ca valori de performan ce urmeaz a fi realizate de
autoturisme, n tabelul 3.7. sunt cuprinse valori maxime i valori medii.
Punctul de aplicare al rezistenei la demarare este centrul de greutate al
automobilului.
Tipul autovehiculului
Autoturisme cu caracteristici sport
Autoturisme
Autobuze urbane
Autobuze turistice i interurbane
Autocamioane
Tabelul 3.7. Valori maxime i valori medii ale acceleraiilor
Aceleraii medii m/s
Acceleraii maxime m/s
treapta I ultima treapt
Limita aderenei
3,0-3,5
1,0-1,5
3,5-4,5
2,5-3,5
0,8-1,2
1,8-2,0
1,6-1,8
0,4-0,8
2,3-3,0
1,9-2,3
0,6-1,0
2,3-2,5
1,7-4,0
0,3-0,5
3.5.Exemplu de calcul
Dup alegerea parametrilor pricipali ai autovehiculului, n urma efecturii
studiului soluiilor similare rezistenele la naintare sunt:
51
DINAMICA AUTOVEHICULELOR Indrumar de proiectare
1. Rezistena la rulare. Pentru a calcul coeficientul rezistenei la rulare se
utilizeaz relaia (3.7). Relaia ofer cele mai bune rezultate n domeniul
de interes comparabile cu cele medii indicate.
Valorile coeficientului rezisteei la rulare pentru funcia aleas sunt:
Tabelul Ex.3.1. Valorile coefientului rezistenei la rulare
0
20
40
60
80
100
120
140
160
180
185
0.0075
0.0080
0.0085
0.0091
0.0097
0.0106
0.0117
0.0133
0.0154
0.0183
0.0192
Pentru nvingerea rezistenei la rulare for necesar i puterea necesar sunt
(relaiile (3.13) i (3.14)):
Tabelul Ex.3.2 Fora i puterea necesare nvingerii rezistenei la rulare.
V [km/h]
20
40
60
80
100
120
140
160
180
185
Rr [N]
105.9607
112.7732
120.2213
129.0680
140.3811
155.5338
176.2042
204.3758
242.3370
253.6541
Pr [kW]
0.5887
1.2530
2.0037
2.8682
3.8995
5.1845
6.8524
9.0834
12.1168
13.0350
2. Rezistena aerului. Pentru autovehiculul de studiat s-au calculate pentru
forma aleas a autovehiculului cx=0,35 i A=1,82 m.
Valorile forei i puterii necesare nvingerii rezistenei aerului sunt (calculate cu
relaia (3.17)):
Fig.Ex.3.1 Calculul coeficientului rezistenei la rulare
Tabelul Ex.3.3. Fora i puterea necesare nvingerii rezistenei aerului.
v [km/h]
Ra [N]
Pa [kW]
10.00
3.01
0.01
20.00
12.04
0.07
40.00
48.17
0.54
60.00
108.38
1.81
80.00
192.67
4.28
100.00
301.05
8.36
Fig.Ex.3.2. Fora necesar nvingerii rezistenei la rulare
52
Definirea condiiilor de autopropulsare
120.00
130.00
140.00
150.00
160.00
170.00
180.00
185.00
433.51
508.78
590.06
677.37
770.69
870.04
975.41
1030.35
14.45
18.37
22.95
28.22
34.25
41.09
48.77
52.95
Fig.Ex.3.3. Fora necesr nvingerii rezistenei aerului.
3. Rezistena la pant. Valoarea rezistenei la pant n funcie de unghiul
pantei este reprezentat n figura Ex.3.4:
53
DINAMICA AUTOVEHICULELOR Indrumar de proiectare
Fig.Ex.3.4. Fora necesar nvingerii rezistenei la pant.
[]
2
4
6
8
10
12
14
16
17
Tabelul Ex.3.4. Valorile rezistenei la pant
Calculate cu relaia (3.20)
Rp [N]
556.34
1112.01
1666.31
2218.59
2768.17
3314.37
3856.54
4394.00
4660.77
4. Rezistena la demaraj
Adoptnd n funcie de valorile tipurilor similare de autoturisme valorile
preliminare:
IM =0,5 [kgm2]; IR=4,0 [kgm2]; icv1=3,5; io =3,2
i avnd n vedere valorile determinate anterior: m a=16250 [kg], rr=0,311 [m],
valorile preliminare ale coeficienilor M, R i 1,
0,23
3,8 2
0,92 0,0194
1625 0,3112
3,5
1
0,0223
1625 0,3112
m a
R
1 1 0,02 3,4 2 0,0223 1,2419
3.6. Ecuaia general de micare rectilinie a automobilului.
Pentru stabilirea ecuaiei generale de micare se consider automobilul n
micare rectilinie, pe o cale cu nclinare , n regim tranzitoriu de vitez cu
acceleraie pozitiv.
Echilibrul dinamic al automobilului este date de bilanul de traciune, care
reprezint ecuaia de echilibru dup direcia vitezei automobilului, de forma:
FR R r R a R p R d [N]
(3.24)
n care: FR este fora activ;
R r , R a ,R p , R d rezistenele la naintare.
54
Definirea condiiilor de autopropulsare
Bilanul de traciune exprim egalitatea dintre fora total la roat obinut
prin nsumarea forelor tangeniale de la toate roile motoare i suma rezistenelor
la naintarea autovehiculelor, de unde rezult:
dv
1
1
(IR Ga f sin Ga cos C x A v 2 )
(3.25)
dt ma
2
sau:
dv
1
1
(FR Ga C x A v 2 )
(3.26)
dt ma
2
n care fora FR numit fora la roat reprezint aciunea momentului motor asupra
roilor. Expresia analitic a acestei fore este:
FR
M i tr t P t
rr
v
(3.27)
unde:
M
este momentul dintr-un punct de pe caracteristica exterioar
corespunztor unei turaii n a motorului;
P este puterea n aceleai condiii;
TR este randamentul transmisiei;
itr este raportul de transmitere al transmisiei;
rr este raza de rulare a roilor;
v este viteza de deplasare a automobilului.
n funcie de condiiile de autopropulsare ale automobilului, din ecuaia de
micare (3.25) se definesc mai multe forme particulare i anume:
a) Deplasarea cu vitez maxim.
Prin convenie viteza maxim este cea mai mare valoare a vitezei cu care
automobilul se poate deplasa pe o cale orizontal. Ca urmare n condiiile vitezei
dv
0 din expresia ecuaiei de
dt
micare dat de relaia (3.25) se obine forma particular
maxime cnd 0 i v v max const.
FR v max G a f
1
2
N
C x A v max
2
(3.28)
b) Deplasarea pe calea cu nclinare longitudinal maxim sau pe calea cu
rezisten specific minim.
Deplasarea pe panta maxim (sau pe cale cu rezistena specific maxim) se
obine cnd ntreaga for disponibil este utilizat pentru nvingerea rezistenelor
legate de tipul i caracteristicile drumului R . Pentru acest caz, avnd n vedere
i faptul c la viteze mici, specifice deplasrii automobilului pe panta maxim,
rezistena aerului este neglijabil in raport cu celelate fore din expresia forei la
roat dat de relaia (3.26) se obine forma particular:
FR
max
G a max
c) Pornirea de pe loc cu acceleraia maxim
(3.29)
55
DINAMICA AUTOVEHICULELOR Indrumar de proiectare
Pornirea de pe loc cu acceleraia maxim se obine n condiia n care intreaga
fora disponibil se utilizeaz pentru sporirea vitezei automobilului, situaie ce
corespunde pornirii din loc ( v 0 0 ) pe cale orizontal ( 0 ). Pentru acest caz,
de autopropulsare pe cale orizontal cu pornire din loc (rezistena aerului este
nul) expresia forei la roat dat de relaia (3.25) se reduce la forma particular
dv
dt
FRa 1 max G a f m a 1
1 max
(3.30)
unde:
dv
dt
a1max
este acceleraia maxim n treapta I.
1 max
S-ar putea să vă placă și
- Sistemul StopDocument15 paginiSistemul StopNorbertÎncă nu există evaluări
- Lucrare LicentaDocument53 paginiLucrare LicentaNorbertÎncă nu există evaluări
- An1. Sem2 EADA..Document29 paginiAn1. Sem2 EADA..NorbertÎncă nu există evaluări
- Calculul Si Constructia PistonuluiDocument28 paginiCalculul Si Constructia PistonuluiNorbert100% (1)
- Proiect GPS GIS Sisteme GeorgraficeDocument32 paginiProiect GPS GIS Sisteme GeorgraficeNorbertÎncă nu există evaluări
- Analiza Sistemului de DistributieDocument12 paginiAnaliza Sistemului de DistributieNorbertÎncă nu există evaluări
- Calculul Si Constructia PistonuluiDocument27 paginiCalculul Si Constructia PistonuluiNorbert100% (1)
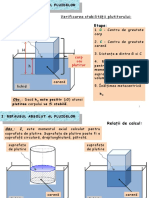
- Seminar 6 - Plutirea Corpurilor STABILITATEADocument23 paginiSeminar 6 - Plutirea Corpurilor STABILITATEANorbertÎncă nu există evaluări
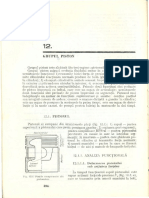
- Grunwald Cap 12 394 425Document34 paginiGrunwald Cap 12 394 425NorbertÎncă nu există evaluări