S-ar putea să vă placă și
- Prezenta Documentaţie Este Proprietatea Universităţii Petrol - Gaze Din PloieștiDocument42 paginiPrezenta Documentaţie Este Proprietatea Universităţii Petrol - Gaze Din PloieștiMihai V PatrascuÎncă nu există evaluări
- Edi Transportation InteligenceDocument76 paginiEdi Transportation InteligenceBogdanBaleaÎncă nu există evaluări
- Proiect Mecanisme Punctele 1 Si 2Document2 paginiProiect Mecanisme Punctele 1 Si 2Mihai V PatrascuÎncă nu există evaluări
- Dorin Lelea, Adrian Cioabla-Metode Numerice in Ingineria MecanicaDocument124 paginiDorin Lelea, Adrian Cioabla-Metode Numerice in Ingineria MecanicaMihai V PatrascuÎncă nu există evaluări
- Scada IstdhDocument42 paginiScada Istdhmariancostin65Încă nu există evaluări
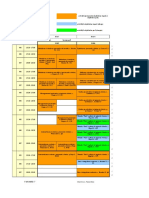
- F 026 Orar Studenti MICAZ 2019-2020 Sem IDocument6 paginiF 026 Orar Studenti MICAZ 2019-2020 Sem IMihai V PatrascuÎncă nu există evaluări
- F 026 Orar Studenti MICAZ 2019-2020 Sem IDocument6 paginiF 026 Orar Studenti MICAZ 2019-2020 Sem IMihai V PatrascuÎncă nu există evaluări
- Memoriu AradDocument30 paginiMemoriu AradMihai V PatrascuÎncă nu există evaluări
- EN1992!1!1 RoEurocod 2 Proiectarea Structurilor de Beton-Reguli Generale Si Reguli Pentru CladiriDocument16 paginiEN1992!1!1 RoEurocod 2 Proiectarea Structurilor de Beton-Reguli Generale Si Reguli Pentru CladiriMihai V PatrascuÎncă nu există evaluări
- Tot Ce Trebuie Sa Stiti Despre AnvelopeDocument11 paginiTot Ce Trebuie Sa Stiti Despre AnvelopecudalbgeoÎncă nu există evaluări
- Memoriu Arad PDFDocument30 paginiMemoriu Arad PDFMihai V PatrascuÎncă nu există evaluări
- Catalog Motoare Asincrone TrifazateDocument24 paginiCatalog Motoare Asincrone Trifazateuvt1100% (1)
- TenarisSilcotub - Programe Studenti Si Absolventi 2017-2018 RomaniaDocument10 paginiTenarisSilcotub - Programe Studenti Si Absolventi 2017-2018 RomaniaMihai V PatrascuÎncă nu există evaluări
- Catalog Motoare Asincrone TrifazateDocument24 paginiCatalog Motoare Asincrone Trifazateuvt1100% (1)
- Curs AHP 2014 7Document8 paginiCurs AHP 2014 7Mihai V PatrascuÎncă nu există evaluări
- L6Document9 paginiL6Mihai V PatrascuÎncă nu există evaluări
- Curs AHP 2014 5Document7 paginiCurs AHP 2014 5Mihai V PatrascuÎncă nu există evaluări
- Transformatorul Electric Monofazat: Noţiuni IntroductiveDocument11 paginiTransformatorul Electric Monofazat: Noţiuni IntroductiveMihai V PatrascuÎncă nu există evaluări
- Curs AHP 2012 6Document12 paginiCurs AHP 2012 6Alin MarianÎncă nu există evaluări
- Măsurări in Circuitele Trifazate de Curent Alternativ: Noţiuni IntroductiveDocument6 paginiMăsurări in Circuitele Trifazate de Curent Alternativ: Noţiuni IntroductiveMihai V PatrascuÎncă nu există evaluări
- Catalog RoryDocument166 paginiCatalog RoryMoon RdrÎncă nu există evaluări
- Studiul Construcţiei Maşinii de Curent ContinuuDocument9 paginiStudiul Construcţiei Maşinii de Curent ContinuuMihai V PatrascuÎncă nu există evaluări
- Tema 2 - Viteze Si AcceleratiiDocument6 paginiTema 2 - Viteze Si AcceleratiiMihai V PatrascuÎncă nu există evaluări
- Tematica Lab. EMEDocument1 paginăTematica Lab. EMEMihai V PatrascuÎncă nu există evaluări
- L1Document7 paginiL1Mihai V PatrascuÎncă nu există evaluări
- Cop ErtaDocument2 paginiCop ErtaMihai V PatrascuÎncă nu există evaluări
- Instructiuni Curriculum VitaeDocument5 paginiInstructiuni Curriculum VitaeeRiotanÎncă nu există evaluări
- Echivalenta Otel OL - SDocument3 paginiEchivalenta Otel OL - SPoe_v67% (9)
- Oferta Coca Cola 2015Document3 paginiOferta Coca Cola 2015Mihai V PatrascuÎncă nu există evaluări