Documente Academic
Documente Profesional
Documente Cultură
Cap5 Efectele Cuantizarii
Încărcat de
Alina AlinaTitlu original
Drepturi de autor
Formate disponibile
Partajați acest document
Partajați sau inserați document
Vi se pare util acest document?
Este necorespunzător acest conținut?
Raportați acest documentDrepturi de autor:
Formate disponibile
Cap5 Efectele Cuantizarii
Încărcat de
Alina AlinaDrepturi de autor:
Formate disponibile
251
CAPITOLUL 5
EFECTELE LUNGIMII FINITE A CUVINTELOR
N FILTRAREA DIGITAL
5. 1. Introducere
Teoria filtrelor digitale s-a bazat pe presupunerea c att
semnalele, ct i parametrii filtrelor pot avea orice valoare finit. n
realitate, datorit limitrii lungimilor cuvintelor din orice sistem digital,
sunt permise numai valori discrete ale amplitudinii semnalelor, respectiv
coeficienilor. Lund n consideraie aceste valori discrete n relaiile care
caracterizeaz filtrele, vor rezulta ecuaii neliniare, care, n general, nu vor
putea fi riguros prelucrate.
Implementarea sistemelor discrete, fr a considera efectele
lungimii finite a cuvintelor, inerente n orice implementare digital, a
condus la obinerea unor caracteristici liniare. De fapt, au fost analizate
sisteme modelate liniar, dar ale cror realizri digitale sunt implicit
neliniare. Aceast problem reprezint un dezavantaj major al filtrelor
digitale i, prin urmare, analiza efectelor lungimii finite a cuvintelor
asupra performanelor filtrelor constituie o etap important n proiectarea
filtrelor digitale.
n cazul filtrelor recursive, caracteristicile neliniare rezultate din
operaia de cuantizare din multiplicatoare, pot cauza un comportament
oscilatoriu la ieirea filtrelor, chiar i n absena semnalului de intrare.
Mai mult, n sumatoare poate aprea depirea aritmetic care produce, de
asemenea, oscilaii la ieire.
n cazul calculatoarelor care lucreaz cu lungimi mari ale
cuvintelor (adic au un numr mare de bii disponibili pentru
reprezentarea numerelor), efectele cuantizrii pot fi nesemnificative.
Acestea cresc cu descreterea numrului de bii. Din acest motiv sunt
necesare modele matematice care s permit estimarea efectelor lungimii
finite a cuvintelor asupra performanelor filtrelor. Un model simplu este
252
cel care se bazeaz pe presupunerea c erorile de cuantizare sunt mici n
comparaie cu nivelul semnalului sau al parametrului, adic este o
cuantizare fin n care erorile pot fi tratate ca zgomot i problema
devine liniar [23].
Principalele tipuri de erori de cuantizare care apar n filtrarea
digital sunt:
1. Erori de cuantizare ale semnalului de intrare n conversia
analog digital (A/D);
2. Erori rezultate din cuantizarea coeficienilor filtrelor
digitale;
3. Erori rezultate din rotunjirea produselor;
4. Depirea aritmetic;
5. Oscilaii cu cicluri limit.
Dintre aceste tipuri de efecte, erorile de cuantizare ale semnalului
de intrare au loc n afara filtrului, naintea calculelor interne, restul
efectelor sunt interne filtrului i influeneaz metoda prin care sistemul va
fi implementat.
De exemplu, pentru un filtru digital de ordinul nti
| | | | | | n x n Ay n y + = 1 (5.1)
eroarea de tipul 1 se refer la cuantizarea intrrii | | n x , eroarea de tipul 2
apare n reprezentarea parametrului A iar cea de tipul 3 apare la formarea
produsului | | 1 n Ay , necesar la fiecare iteraie.
Elementul de baz dintr-un calculator numeric este circuitul cu
dou stri echiprobabile, cruia i se asociaz o informaie de 1 bit. N
astfel de dispozitive pot fi cascadate pentru a forma un registru care
conine N bii de informaie. Implementarea unui filtru digital recursiv de
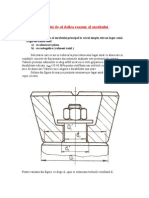
ordinul nti descris de ecuaia (5.1) i redat n figura 5.1, ilustreaz cele
mai importante operaii ce trebuie efectuate.
Ieirea anterioar ] 1 [ n y este stocat n registrul de ieire sub
forma unui numr pe N bii. Acesta este multiplicat cu numrul pe N bii
care reprezint coeficientul A care a fost stocat n registrul pentru
coeficieni. Produsul ] 1 [ n y A (dup rotunjire la N bii) este adunat la
intrarea curent ] [n x (de asemenea un numr pe N bii) pentru a forma
ieirea actual ] [n y care este stocat pentru multiplicare cu A n iteraia
urmtoare. ntreaga procedur ncepe cu o valoare iniial ] 1 [ y stocat
n registrul de ieire. Aceasta poate fi sau nu, egal cu zero. Filtrele de
ordin superior pot fi implementate ntr-un mod similar.
253
Figura 5.1. Implementarea unui filtru recursiv de ordinul nti
Diferitele structuri de implementare ale unui sistem descris de
ecuaii cu diferene cu coeficieni constani sunt echivalente dac
furnizeaz aceeai ieire pentru o intrare dat, presupunnd calculele
interne ca fiind efectuate cu precizie infinit. Acestea nu sunt echivalente
cnd sunt realizate cu precizie finit.
Trei factori importani contribuie la alegerea unei anumite realizri
a filtrelor:
- complexitatea calculelor,
- necesarul de memorie,
- efectele lungimii finite a cuvintelor.
Efectul lungimii finite a cuvintelor reprezint un factor important
n implementarea sistemelor digitale de prelucrare a semnalelor i trebuie
luat n calcul la realizarea filtrelor digitale, deoarece limitarea numrului
de bii conduce la degradarea performanelor filtrelor digitale. nainte de a
examina aceste efecte, se va prezenta o scurt introducere n aritmetica
digital.
5.2. Reprezentarea numerelor
n procesarea digital a semnalelor analogice, eantioanele
semnalului analogic sunt reprezentate n format digital. n principiu,
procesul de conversie A/D implic eantionarea semnalului analogic i
reprezentarea eantioanelor ca secvene de bii care definesc amplitudinea
cuantizat a semnalului. Principala caracteristic a aritmeticii digitale
const n numrul limitat (de obicei fix) de bii folosii n reprezentarea
numerelor. Aceast constrngere are ca rezultat precizia finit a
254
calculelor, care conduce la erori i efecte neliniare n comportamentul
filtrelor digitale.
n cadrul reprezentrii binare a numerelor reale sunt mai multe
metode prin care un eantion al unui semnal analogic poate fi reprezentat
n format binar. Clasa reprezentrilor binare poate fi mprit n
reprezentrile n virgul fix, virgul mobil i virgul mobil cu blocuri.
5.2.1. Reprezentarea numerelor n virgul fix
Reprezentarea numerelor n virgul fix este generalizarea
reprezentrii zecimale, n care numerele din stnga virgulei reprezint
partea ntreag a numrului, iar cele din dreapta virgulei, partea
fracionar.
( ) ( ) 1 0 ,
0 1
= =
=
r b r b b b b b x
i
b
a i
i
i r b a
(5.2)
unde
i
b reprezint cifra, r baza, a+1 numrul de cifre ale prii ntregi
i b numrul de cifre ale prii fracionare.
Datorit vitezei i costului sczut al prii hard asociate,
reprezentarea n virgul fix este deseori preferat n computere mai puin
performante i n circuite dedicate care lucreaz n timp real. Cea mai
cunoscut reprezentare este cea pentru care r=2, n care numerele
i
b se
numesc numere binare sau bii i pot lua valorile {0,1}, obinndu-se
codul binar natural direct. Virgula binar dintre b
0
i b
1
nu exist fizic
n calculator. Circuitele logice ale acestuia sunt proiectate astfel nct
calculele s aib ca rezultat numere ce corespund poziiei virgulei binare.
Totui, n cele ce urmeaz, se va folosi virgula pentru a sublinia caracterul
fracionar al numrului reprezentat.
Folosind un format ntreg pe n bii (a=n-1, b=0), se pot reprezenta
ntregi fr semn cuprini n domeniul 0 (2
n
-1). De obicei se folosete
formatul fracionar (a=0, b=n-1), cu virgula binar ntre b
0
i b
1
, care
permite reprezentarea numerelor n domeniul 0 (1 - 2
-n
).
Indiferent dac codul binar reprezint o fracie, un ntreg, sau
ambele, primul bit din stnga este numit cel mai semnificativ bit (most
significant bit, MSB) iar bitul cel mai din dreapta, cel mai puin
semnificativ bit (least significant bit, LSB). n reprezentarea unei fracii,
MSB are o pondere de 2
-1
=1/2 iar LSB are o pondere de 2
-b
=1/2
b
, unde b
este numrul de bii pe care este reprezentat fracia. Ponderea 2
-b
=1/2
b
desemnat de LSB este numit i rezoluie.
255
Orice ntreg sau numr cu parte ntreag i fracionar poate fi
reprezentat n format fracionar prin factorizarea termenului r
a
n relaia
(5.2). n aceast notaie un cuvnt de cod de a+1 bii, cum ar fi 10011,
corespunde numrului ntreg
19 16 2 1 2 1 2 0 2 0 2 1 2 1
4 3 2 1 0
= + + = + + + + = A
Pe de alt parte, numrul 0,10011 reprezint o fracie
corespunztoare numrului zecimal
32
19
32
1
16
1
2
1
2 1 2 1 2 0 2 0 2 1
5 4 3 2 1
= + + = + + + + =
B
Se observ c o deplasare a virgulei binare spre stnga cu n poziii
corespunde unei mpriri a numrului cu 2
n
, iar o deplasare a virgulei
binare spre dreapta cu n poziii corespunde unei nmuliri a numrului cu
2
n
.
Pentru a transforma un numr zecimal n corespondentul su
binar, se procedeaz astfel: se divide n mod repetat numrul zecimal din
stnga virgulei la 2, reinndu-se restul. Acesta, scris n ordine invers (de
la dreapta spre stnga) este reprezentarea binar a prii ntregi. Partea din
dreapta virgulei se multiplic n mod repetat cu 2, nlturnd de fiecare
dat partea zecimal i reinnd partea ntreag. Scriind aceasta n ordine
normal, (de la stnga la dreapta), se obine reprezentarea binar a prii
fracionare.
Exemplul 5.1.
S se transforme numrul zecimal 627,625 n format binar.
Soluie.
Partea ntreag Partea zecimal
627 : 2 = 313 1 0.625 x 2 = 1.250 1
313 : 2 = 156 1 0.250 x 2 = 0.500 0
156 : 2 = 78 0 0.500 x 2 = 1.000 1
78 : 2 = 39 0 0.000 x 2 = 0.000 0
39 : 2 = 19 1
19 : 2 = 9 1
9 : 2 = 4 1
4 : 2 = 2 0
2 : 2 = 1 0
1 : 2 = 0 1
Prin urmare ( ) ( )
2 10
101 , 1001110011 625 , 627 =
Operaiile cu numere binare se execut similar celor zecimale.
256
1. Adunarea
0 + 0 = 0
0 + 1 = 1
1 + 0 = 1
1 + 1 = 0 se transport 1
2. Scderea
0 0 = 0
1 0 = 1
0 1 = 1 se import 1
1 1 = 0
3. Multiplicarea
0 x 0 = 0
1 x 0 = 0
0 x 1 = 0
1 x 1 = 1
4. mprirea
1 : 1 = 1
0 : 1 = 0
mprirea la 0 nu este definit.
Aritmetica n virgul fix este potrivit att pentru operaii cu
numere ntregi, ct i fracionare.
Dac este necesar rotunjirea produsului a dou numere, este mai
bine a se limita reprezentarea n virgul fix a numerelor fracionare,
dect a celor care au att parte ntreag, ct i fracionar, deoarece
reducerea numrului de bii ai prii ntregi ar cauza erori mari.
n conversia semnalelor analogice bipolare, este necesar un bit
adiional pentru a purta informaia de semn. De obicei cel mai
semnificativ bit este rezervat semnului numrului, cu convenia ca zero s
indice un numr pozitiv, iar unu, un numr negativ. Rezultatul este un cod
bipolar. Exist mai multe posibiliti de reprezentare a codurilor bipolare
binare, alegerea dintre acestea fcndu-se n funcie de avantajele i
dezavantajele pe care le prezint fiecare pentru aplicaia respectiv. Patru
metode sunt frecvent folosite pentru reprezentarea numerelor bipolare. n
continuare se va considera c numerele sunt reprezentate pe N=b+1 bii,
din care unul pentru semn.
Formatul mrime cu semn sau semn valoare este cea mai simpl
metod pentru reprezentarea numerelor cu semn n format digital. Un zero
n poziia MSB reprezint un numr pozitiv, iar un unu n aceeai poziie
257
reprezint un numr negativ. Restul de b bii reprezint modulul sau
amplitudinea numrului.
n cazul numerelor fracionare, reprezentarea mrime cu semn
pentru un numr pozitiv 0 x este de forma
, ... , 0 ) (
2 1 b ms
b b b x = (5.3)
iar pentru numrul negativ
b N
b b b x x
2 1
, 0 = = , de forma
, ... , 1 ) (
2 1 b ms N
b b b x = (5.4)
Aa cum s-a precizat deja, virgula nu exist fizic n reprezentarea
numrului, dar, n cele ce urmeaz va fi utilizat pentru a specifica
numerele fracionare. Se observ c n acest format zero are dou
reprezentri: 0,00 i 1,000.
Valoarea zecimal a unui numr fracionar pozitiv este
( )
=
=
b
i
i
i ms
b x
1
2 , (5.5)
iar a unui numr fracionar negativ este
=
b
i
i
i ms N
b x
1
2 ) ( . (5.6)
Modulul unui numr fracionar reprezentat n formatul mrime cu
semn este dat de
= =
b
i
i
i N
b x x
1
2 . (5.7)
Reprezentarea n complement fa de unu este identic celei n
reprezentarea mrime cu semn pentru numere pozitive, dar difer prin
modul cum sunt formate numerele negative. n acest format, un numr
negativ este obinut prin complementarea numrului pozitiv
corespunztor.
n cazul formatului fracionar, numerele pozitive se reprezint ca
n relaia (5.3), iar cele negative
b N
b b b x x
2 1
, 0 = = sub forma
b b C N
b b b b b b x ... , 1 ... , 0 ) (
2 1 2 1 1
= = (5.8)
Plecnd de la relaia (5.8), reprezentarea n complement fa de
unu a unui numr negativ fracionar mai poate fi exprimat n forma
=
= + =
b
i
b i
i C N
x b x
1
0
1
2 2 2 ) 1 ( 2 1 ) ( (5.9)
Se observ ambiguitate n reprezentarea lui zero, ca 0,00 sau 1,11.
258
Modulul numrului negativ
b
b b b b
2 1 0
, reprezentat n complement
fa de unu este
b
b
i
i
i N
b x
=
=
2 2 1
1
(5.10)
Valoarea zecimal a numrului negativ
b
b b b b
2 1 0
, reprezentat n
complement fa de unu este
( ) ( )
b
b
i
i
i C N
b x
=
+ + =
2 2 1
1
10 1
(5.11)
Spre exemplu, reprezentarea lui 3/8 este 1,100, care este
complementul fa de unu al lui 0,011 (3/8).
Reprezentarea n complement fa de doi este identic cu formatul
mrime cu semn n cazul numerelor pozitive. Prin urmare numerele
pozitive sunt reprezentate cu un zero n poziia bitului de semn. Pentru a
obine reprezentarea n complement fa de doi a unui numr negativ, se
scrie modulul acestuia n formatul mrime cu semn, se inverseaz biii
acestei reprezentri i se adun o unitate logic n poziia LSB.
Similar, un numr fracionar pozitiv se reprezint sub forma (5.3),
iar numrul fracionar negativ
b N
b b b x x
2 1
, 0 = = , sub forma
01 0 , 0 , 0 ) ( 2 1
2
+ = b
c N
b b b x (5.12)
Semnul + indic adunarea modulo 2 care ignor bitul de transport, dac
acesta este prezent n MSB.
Plecnd de la relaia (5.12), reprezentarea n complement fa de
doi a unui numr fracionar negativ mai poate fi exprimat n forma
( ) x b x
b
b
i
i
i C N
= + + =
=
2 2 2 ) 1 ( 1
1
2
, (5.12)
adic, un numr fracionar negativ este complementul fa de doi al
numrului pozitiv corespunztor, care se obine scznd numrul pozitiv
din 2, reprezentat n binar. De aici provine denumirea formatului.
Din (5.9) i (5.12) rezult
( ) ( )
b
C N C N
x x
+ = 2
1 2
(5.13)
Valoarea zecimal a unui numr
b
b b b b
2 1 0
, reprezentat n
complement fa de doi, este
+ =
b
i
i
i C
b b x
1
0
0 10 2
2 2 ) ( (5.14)
259
unde 0
0
= b , pentru numere pozitive i 1
0
= b , pentru numere negative.
Modului numrului negativ reprezentat n complement fa de doi
este
=
b
i
i
i N
b x
1
2 1 (5.15)
De exemplu, reprezentarea n complement fa de doi a numrului
3/8 se obine din complementarea lui 0,011 (3/8), rezultnd 1,100, i
apoi adugnd 0,001. Rezultatul final este 1,101.
Codul binar deplasat sau offsetul binar este similar codului binar
direct, obinndu-se din acesta prin deplasarea n domeniul valorilor
negative cu jumtate din ntreaga scal. Cu b+1 bii se pot reprezenta 2
b+1
numere. Pentru un cod bipolar exist 2M numere, cu M=2
b
, cuprinse n
intervalul -2
b
(2
b
-1) pentru numere ntregi i n intervalul -1(1-2
-b
)
pentru numere fracionare. n acest format cel mai mic numr negativ este
reprezentat de un numr format din b+1 bii de zero iar cel mai mare
numr pozitiv este format din b+1 bii de unu. n acest caz zero are o
singur reprezentare i, prin urmare, se evit ambiguitatea ntlnit la
formatul mrime cu semn. Marele dezavantaj al acestei notaii este dat de
posibilele erori ce pot aprea la citirea MSB-ului, n loc de unu, zero sau
invers, rezultnd o eroare de amplitudine mare.
Dac se compar formatul complement fa de doi i offsetul
binar, se constat c ele difer prin MSB si, prin urmare, este uor a se
trece de la o reprezentare la alta.
n Tabelul 5.1 sunt date codurile bipolare prezentate pentru
reprezentarea numerelor ntregi pe 4 bii, dintre care unul pentru semn.
TABEL 5.1 Coduri bipolare
Numr
Formatul
mrime cu
semn
Ofset
binar
Complement
fa de doi
Complement
fa de unu
7 0111 1111 0111 0111
6 0110 1110 0110 0110
5 0101 1101 0101 0101
4 0100 1100 0100 0100
3 0011 1011 0011 0011
2 0010 1010 0010 0010
1 0001 1001 0001 0001
0 0000 1000 0000 0000
260
0 1000 1000 0000 1111
-1 1001 0111 1111 1110
-2 1010 0110 1110 1101
-3 1011 0101 1101 1100
-4 1100 0100 1100 1011
-5 1101 0011 1011 1010
-6 1110 0010 1010 1001
-7 1111 0001 1001 1000
-8 - 0000 - -
n Tabelul 5.2 sunt date, comparativ, diferite reprezentri ale
numerelor fracionare pentru o lungime de 3 bii a cuvintelor.
Tabelul 5. 2
Echivalentul zecimal folosind reprezentarea
Numr
binar
Mrime i
semn
Complement
fa de 1
Complement
fa de 2
0,11 3 / 4 3 / 4 3 / 4
0,10 2 / 4 2 / 4 2 / 4
0,01 1 / 4 1 / 4 1 / 4
0,00 0 0 0
1,00 - 0 - 3 / 4 - 4 / 4 = - 1
1,01 -1 / 4 - 2 / 4 - 3 / 4
1,10 - 2 / 4 - 1 / 4 - 2 / 4
1,11 - 3 / 4 - 0 - 1 / 4
Din tabel se observ, aa cum s-a mai specificat, c exist dou
reprezentri pentru zero n format mrime cu semn i complement fat de
1 i nici o reprezentare pentru 1. Formatul complement fa de 2 are o
singur reprezentare pentru 0 i poate reprezenta numere cuprinse ntre 1
i
2
2 1
sau, n general, ntre 1 i
( ) 1
2 1
N
pentru un registru de N
bii. Reprezentarea n complement fa de 2 este adesea utilizat n
implementarea filtrelor digitale datorit uurinei efecturii operaiilor de
adunare i scdere, caz n care desczutul se adun cu complementul fa
de doi a scztorului.
Diferena dintre numrul maxim i cel minim ce poate fi
reprezentat se numete domeniu dinamic.
261
Exemplul 5.2.
Folosind reprezentarea n complement fa de 2 pe 4 bii s se
efectueze operaiile a) A - B i b) B - A unde A = 0,250 i B = 0,625
Soluie
a) zecimal complement fa de 2
0,250 - 0,010 +
0,625 1,011
-0,375 1,101 = - 0,375
b) 0,650 - 0,101 +
0,250 1,110
0,375 0,011 = 0,375
Se observ c n reprezentarea n complement fa de 2 bitul de
transport n poziia cea mai semnificativ este neglijat.
Adunarea i scderea n complement fa de 1 sunt similare, dar
bitul de transport din poziia cea mai semnificativ este deplasat n poziia
celui mai puin semnificativ bit.
De exemplu,
4
8
3
8
1
8
= . n formatul complement fa de unu,
transportul din MSB, dac este prezent, este purtat spre LSB. Astfel,
calculul
4
8
3
8
1
8
= devine 0,1001,100=0,0000,001=0,001.
Adunarea i scderea n sistemul mrime cu semn sunt mai
complexe i, ca urmare, acesta este folosit mai mult la multiplicare, care
se efectueaz prin multiplicarea modulelor i stabilind semnul produsului.
Exemplul 5.3.
S se multiplice numerele 0,625 i 0,250 folosind reprezentarea
mrime cu semn.
Soluie.
Zecimal Mrime cu semn
0,625 0,101
0,250 0,010
0000 000
3125 101
1250 000
0,156250 0,001010 = 0,156250
Multiplicarea n aritmetica complement fat de 1 i fa de 2 este
mai dificil i necesit un hard sau algoritmi speciali.
262
Dac rezultatul unei operaii aritmetice depete numrul maxim
ce poate fi reprezentat pe b bii, apare depirea. n procesarea digital se
folosete, de obicei, formatul fracionar, numerele care reprezint
mrimile ce intervin n procesare i rezultatele operaiilor aritmetice sunt
scalate, astfel nct modulul lor s nu depeasc valoarea 1.
La multiplicarea numerelor fracionare, nu exist probleme de
depire n cele trei aritmetici. Depirea poate aprea numai cnd suma
numerelor fracionare este mai mare dect 1. Dac depirea apare ntr-o
etap intermediar a adunrii, n final nu va exista depire, cu condiia ca
valoarea absolut a rezultatului final s fie subunitar.
Exemplul 5.4.
S se adune 0,3125 + 0,7500 + (-0,6250) folosind aritmetica n
complement fat de 1 pe cinci bii.
Soluie.
zecimal complement fa de 1
0,3125 0,0101
+0,7500 0,1100
1,0625 1,0001 incorect, MSB = 1 implic numr negativ
-0,6250 1,0101
0,4375 0,0111 ultimul 1 se datoreaz transportului
Exemplul 5.5.
S se exprim fraciile
7
8
i
7
8
n formatele: mrime cu semn,
complement fa de 1 i complement fa de 2.
Soluie. x =
7
8
, este reprezentat ca 2
-1
+2
-2
+2
-3
, care, n formatul
mrime cu semn conduce la 111 , 0 = x , iar x =
7
8
este reprezentat ca x =
1,111. Reprezentarea n complement fa de unu i fa de doi a lui x =
7
8
este aceeai ca formatul mrime cu semn, adic 111 , 0 = x . Reprezentarea
n complement fa de unu a lui x =
7
8
este x
1C
= 1,000 i n
complement fa de doi este 1,001 = 0,001 + 1,000 = x
2C
.
263
Dei sunt posibile o mare varietate de alte reprezentri n virgul
fix, cele descrise anterior sunt cele mai utilizate n practic. Cele mai
multe procesoare de semnal n virgul fix folosesc aritmetica n
complement fa de doi. Aritmetica complementului fa de doi este de
fapt aritmetica modulo-2
b+1
(adic orice numr care depete domeniul,
este redus la acest domeniu, prin scderea celui mai apropiat multiplu de
2
b+1
).
La adunarea sau scderea a dou numere n virgul fix, fiecare de
b bii lungime (cu un bit adiional de semn), rezultatul este un numr de b
bii. Dac rezultatul adunrii depete cel mai mare numr care poate fi
reprezentat pe b bii, apare depirea. Singura metod pentru evitarea
acestei probleme este creterea numrului de bii din acumulator i, prin
urmare, creterea gamei dinamice care poate fi acoperit.
n general, nmulirea a dou numere n virgul fix, fiecare n
lungime de b bii, are ca rezultat un produs de lungime 2b bii. n
aritmetica cu virgul fix, produsul este de obicei trunchiat sau rotunjit la
b bii, ceea ce conduce la o eroare de trunchiere sau rotunjire cauzat de
eliminarea celor mai puin semnificativi b bii.
Depirea n cazul adunrii numerelor n reprezentarea n
aritmetica n virgul fix este un dezavantaj cauzat de domeniul dinamic
redus. Aritmetica n virgul mobil nu prezint acest dezavantaj.
5.2.2. Reprezentarea numerelor n virgul mobil
Reprezentarea n virgul fix a numerelor, permite acoperirea unui
domeniu dinamic, x
max
-x
min
cu o rezoluie
1
min max
=
m
x x
, (5.16)
unde m=2
b+1
este numrul de nivele, iar b+1 numrul de bii. O
caracteristic de baz a reprezentrii n virgul fix este c rezoluia este
fix. n plus, crete direct proporional cu creterea domeniului
dinamic.
Reprezentarea n virgul mobil poate fi folosit ca o metod de
acoperire a unui domeniu dinamic mai larg. Reprezentarea n virgul
mobil cel mai des ntlnit n practic const dintr-o mantis M, care este
partea fracionar a numrului i se ncadreaz n domeniul 1/2 M < 1,
nmulit cu factorul exponenial 2
E
unde exponentul E este un ntreg
pozitiv sau negativ. Un numr X, este reprezentat ca:
E
M X 2 = .
264
Figura 5.2 Reprezentarea n virgul mobil
Mantisa i exponentul necesit fiecare cte un bit de semn pentru
reprezentarea numerelor pozitive sau negative. Deoarece mantisa este o
fracie cu semn, se poate folosi oricare din reprezentrile n virgul fix
descrise anterior.
De exemplu, numrul X
1
=5 este reprezentat de urmtoarea mantis
si exponent:
M
1
=0,101000
E
1
=011
n timp ce numrul X
2
=
3
8
este reprezentat de urmtoarea mantis i
exponent:
M
2
=0,110000
E
2
=101
Dac cele dou numere se nmulesc, mantisele sunt nmulite i
exponenii adunai. Prin urmare produsul celor dou numere date mai sus
este:
001 010
2 1 2 1
2 ) 111100 , 0 ( 2 ) 011110 , 0 ( 2
2 1
= = =
+E E
M M X X
mprirea a dou numere reprezentate n virgul mobil se
efectueaz prin mprirea mantiselor i scderea exponenilor.
( )
2 2
2
2
1
2
1 E E
M
M
X
X
=
Adunarea a dou numere n virgul mobil necesit ca exponenii
s fie egali. Aceasta se poate obine deplasnd virgula binar a mantisei
celui mai mic numr spre stnga i compensnd prin creterea
corespunztoare a exponentului. Atunci numrul X
2
poate fi exprimat n
forma
M
2
=0,000011
E
2
=011
Cu E
1
=E
2
, se pot aduna cele dou numere X
1
i X
2
. Rezultatul este
265
011
2 1
2 ) 101011 , 0 ( = + X X
Se observ c operaia de deplasare, impus de egalarea
exponenilor lui X
2
i X
1,
poate conduce la o precizie mai mic n
reprezentarea lui X
2
. n exemplul anterior, mantisa pe ase bii a fost
suficient de lung pentru a se face deplasarea a patru bii la dreapta pentru
M
2
, fr a pierde nici unul. Totui o deplasare a cinci bii va cauza
pierderea unui singur bit iar deplasarea a ase bii va conduce la mantisa
M
2
=0,000000; de aceea aceasta va trebui rotunjit dup deplasare astfel
nct M
2
=0,000001.
Eroarea de depire apare la multiplicarea a dou numere n
virgul mobil cnd suma exponenilor depete domeniul dinamic al
reprezentrii n virgul fix a exponentului.
Comparnd reprezentarea n virgul fix cu cea n virgul mobil,
cu acelai numr total de bii, rezult c reprezentarea n virgul mobil
permite acoperirea unui domeniu mai larg prin varierea rezoluiei n acel
interval. Rezoluia scade odat cu creterea mrimii numerelor succesive.
Cu alte cuvinte, distana succesiv dintre dou numere reprezentate n
virgul mobil crete odat cu creterea numerelor n mrime. Astfel,
pentru acoperirea aceluiai domeniu dinamic cu ambele reprezentri, n
virgul fix i virgul mobil, reprezentarea n virgul mobil ofer
rezoluie fin pentru numere mici, dar rezoluie slab pentru numere mari,
spre deosebire de reprezentarea n virgul fix, care ofer o rezoluie
uniform n reprezentarea numerelor.
De exemplu, pentru un calculator care lucreaz pe 32 bii, este
posibil reprezentarea a 2
32
numere. Dac se dorete reprezentarea
ntregilor pozitivi ncepnd cu zero, cel mai mare numr ntreg ce poate fi
reprezentat este: 2
32
-1=4.294.967.295. Distana dintre dou numere
succesive (rezoluia) este 1. Altfel, se poate folosi bitul cel mai din stnga
ca bit de semn i ceilali 31 de bii rmai pentru valoare. ntr-un astfel de
caz reprezentarea n virgul fix permite acoperirea domeniului
-(2
31
-1)= -2.147.483.647 la (2
31
-1)= 2.147.483.467
tot cu o rezoluie de 1. Dac, ns, se aloc 10 bii pentru partea
fracionar, 21 de bii pentru partea ntreag i un bit pentru semn, aceast
reprezentare permite acoperirea domeniul dinamic:
) 2 2 ( 2 ) 1 2 (
10 21 10 31
= la
10 21 10 31
2 2 2 ) 1 2 (
= adic
de la -2.097.151,999 la 2.097.151,999
266
n acest caz, rezoluia este 2
-10
. Prin urmare domeniul dinamic a
fost sczut cu un factor de aproximativ 1000 (2
10
mai exact), n timp ce
rezoluia a crescut cu acelai factor.
Pentru comparaie, se presupune c cei 32 bii ai cuvntului sunt
folosii pentru a reprezenta numere n virgul mobil astfel: mantisa pe 23
de bii plus un bit de semn i exponentul cu 7 bii plus un bit de semn.
Cel mai mic numr, n modul, va avea reprezentarea:
semn 23 bii semn 7 bii
0, 100.....0 1 1111111 =
1
2
x 2
-127
0,3 x 10
-38
n cealalt extrem, cel mai mare numr care poate fi reprezentat
cu acest format n virgul mobil este:
semn 23 bii semn 7 bii
0, 11.....1 0 1111111 = (1-2
-23
) x 2
127
1,7 x 10
38
S-a obinut un domeniu dinamic de aproximativ 10
76
, dar cu o
rezoluie variabil, adic rezoluie fin pentru numere mici i rezoluie
slab pentru numere mari.
5.2.3. Reprezentarea n virgul mobil pe bloc
Acest mod de reprezentare a numerelor este un hibrid ntre
sistemele cu virgul fix i cele cu virgul mobil. n acest caz, n loc ca
fiecare numr s fie reprezentat individual, ca n cazul sistemelor cu
virgul mobil, un bloc sau un ir de numere are un exponent fix asociat.
Acest exponent fix este obinut din examinarea tuturor numerelor din bloc
i reprezentarea celui mai mare numr ca un numr cu virgul mobil cu o
mantis normalizat. Avantajul unui astfel de sistem const n folosirea
unui singur exponent pentru un bloc mare de numere. Astfel sistemul este
potrivit pentru implementarea algoritmilor ce necesit un volum mare de
calcule.
5.3. Efectele cuantizrii n conversia A/D a semnalelor
Operaiile de baz ndeplinite de un convertor A/D sunt:
1. S eantioneze semnalul n mod periodic i cu rat de
eantionare suficient de mare pentru a evita eroarea alias;
2. S cuantizeze amplitudinea eantioanelor ntr-un set discret
de nivele.
267
Prin urmare, dintr-un semnal analogic x
a
(t) eantionat cu frecvena
F
s
=1/T, unde T este perioada de eantionare, va rezulta o secven
x[n]=x
a
(nT), a crei amplitudine este cuantizat, rezultnd secvena
]] [ [ ] [ n x Q n x
q
(5.17)
unde ] [n x
q
reprezint semnalul cuantizat, iar ] [ Q operaia de cuantizare.
Dac un semnal al crui domeniu dinamic este R urmeaz a fi
reprezentat pe N=b+1 bii, numrul nivelelor de cuantizare ce pot fi
reprezentate este de
1
2
+ b
. n reprezentarea n virgul fix b bii dau
b
2
valori ale amplitudinii iar un bit d informaia de semn. Distana dintre
dou nivele adiacente sau pasul de cuantizare este
1
2
+
=
b
R
[63].
n reprezentarea n virgul fix a numerelor fracionare, dac
domeniul dinamic depete 1, de multe ori este necesar scalarea
semnalului, caz n care pasul de cuantizare al semnalului scalat este redus
corespunztor la
b
N
= = 2
2
2
1
.
Exemplul 5. 6.
S se determine nivelele de cuantizare ale unui semnal continuu cu
domeniul dinamic 20V dup ce a fost eantionat i apoi procesat cu un
convertor A/D pe N=4 bii.
Soluie. Pasul de cuantizare pentru semnalul nescalat este
V 5 , 2
2
40
4
= = . Pasul de cuantizare pentru semnalul scalat la domeniul
1 este V 125 , 0
2
2
4
1
= = care este
3
2 2
=
b
, adic valoarea
corespunztoare unui 1 n poziia bitului cel mai puin semnificativ.
5.3.1. Cuantizarea semnalului de intrare. Erori rezultate
din rotunjire i trunchiere
n executarea calculelor folosind aritmetica n virgul fix sau
mobil, apare problema cuantizrii numerelor prin trunchiere sau rotunjire
de la o reprezentare pe un anumit numr de bii b
n
(posibil a fi, la limit,
i infinit n cazul unui eantion al unui semnal analogic) la o alta, pe un
numr mai mic de bii, b. Dac valoarea semnalului se afl ntre dou
nivele, aceasta poate fi aproximat fie prin cel mai apropiat nivel superior,
268
fie prin cel mai apropiat nivel inferior. Efectul cuantizrii este c
introduce o eroare a crei valoare depinde de numrul de bii din numrul
original i de numrul de bii de dup cuantizare.
Sunt trei metode de cuantizare frecvent folosite:
- Rotunjirea, caz n care valoarea semnalului este aproximat de
cel mai apropiat nivel de cuantizare.
- Trunchierea, caz n care valoarea semnalului este aproximat
de cel mai mare nivel care este inferior sau egal valoric cu
eantionul semnalului.
- Trunchierea semn valoare, care este asemntoare cu
trunchierea pentru numere pozitive, dar valorile negative ale
semnalului sunt aproximate de cel mai apropiat nivel de
cuantizare mai mare sau egal cu semnalul.
Aceste descrieri se aplic cuantizrii n aritmetica n virgul fix.
Cele dou metode de trunchiere rezult din tratrile diferite ale numerelor
negative n reprezentrile: mrime cu semn, complement fat de 1,
complement fat de 2.
La un moment dat, nT, eroarea datorat cuantizrii este
( )
a qi a i i
x x nT x n x Q E = = ]] [ [ (5.18)
unde r i = n cazul rotunjirii i t i = n cazul trunchierii, ) (nT x x
a a
=
reprezint valoarea necuantizat a semnalului reprezentat pe
n
b +1 bii,
iar
qi i
x n x Q = ]] [ [ , valoarea cuantizat a semnalului reprezentat pe b+1
bii.
Rotunjirea
n cazul rotunjirii
( )
a qr a r r
x x nT x n x Q E = = ]] [ [ i
2 2
r
E ,
b
= 2 (5.19)
Relaia neliniar dintre
qr
x i
a
x este reprezentat n figura 5.3
unde
a
x este un semnal cu amplitudine continu ( =
n
b ).
n reprezentarea n virgul fix, eroarea de rotunjire satisface
relaia (5.19), indiferent de aritmetica folosit pentru reprezentarea
numerelor negative, deoarece rotunjirea este independent de semn, ea
depinznd numai de mrimea numrului.
269
Figura 5.3 Relaia dintre valorile cuantizate i necuantizate n cazul rotunjirii
n reprezentarea n virgul mobil, mantisa este cea trunchiat sau
rotunjit.
Dac
E
a a
M x 2 = (5.20)
i
E
r
M n x Q 2 ]] [ [ = (5.21)
atunci ( )
E
a a r r
M M x n x Q E 2 ]] [ [ = = (5.22)
Dar pentru rotunjire 2 2
a
M M (5.23)
i atunci din relaia (5.19) rezult
2 2 2 2
E
r
E
E , (5.24)
care d eroarea absolut n virgul mobil datorat cuantizrii mantisei.
Se definete eroarea relativ , astfel nct
( ) + = 1 ]] [ [
a r
x n x Q (5.25)
Datorit rezoluiei neuniforme, eroarea corespunztoare
reprezentrii n virgul mobil este proporional cu numrul, adic
a r
x E = (5.26)
i relaia (5.24) devine
2 2 2 2
E
a
E
x (5.27)
sau
2 2 2 2 2
E E
a
E
M (5.28)
adic
2 2
a
M (5.29)
Mantisa satisface relaia
1
2
1
<
a
M (5.30)
270
Dac
2
1
=
a
M , din (5.29) se obine domeniul maxim al erorii
relative ca fiind
(5.31)
Trunchierea
Dac metoda de cuantizare este trunchierea, numrul este
aproximat n aritmetica n virgul fix, prin cel mai mare nivel care este
mai mic sau egal cu valoarea semnalului. Trunchierea numerelor pozitive,
negative i relaia neliniar dintre
qt
x i
a
x sunt reprezentate n figura 5.4,
unde
a
x este un semnal cu amplitudine continu.
Figura 5.4. Relaia dintre valorile cuantizate i necuantizate n cazul trunchierii
a) pentru numere pozitive, b) pentru numere negative, c) caracteristica de trunchiere n
complement fa de 2
Eroarea de trunchiere
a t t
x n x Q E = ]] [ [ este negativ sau zero.
0 <
t
E (5.32)
Acest lucru este valabil pentru toate numerele pozitive reprezentate n
formatul mrime cu semn, complement fa de 1 i complement fa de 2.
n continuare se examineaz trunchierea numerelor negative
reprezentate n diverse formate. Fie nti reprezentarea n complement fat
de 2. Se consider c numrul ce urmeaz a fi trunchiat este reprezentat
271
pe
n
b +1 bii (la limit, se poate considera c =
n
b pentru eantioane ale
unui semnal analogic). Modulul acestui numr negativ este
=
n
b
i
i
i
b A
1
1
2 1 (5.33)
Dac acesta este trunchiat la b bii, modulul numrului devine
=
b
i
i
i
b A
1
2 1 (5.34)
Diferena de mrime a modulului numrului negativ rezultat prin
trunchiere este
0 2 2 2
1 1 1
1
= =
+ =
n n
b
b i
i
i
b
i
i
i
b
i
i
i
b b b A A (5.35)
Deoarece modulul crete prin trunchiere, numrul negativ
reprezentat n complement fa de 2 devine mai mic. Valoarea maxim a
modulului erorii se obine cnd toi coeficienii
i
b sunt egali cu 1, caz n
care
< =
n
b b
A A 2 2
1
, (5.36)
deoarece
b
= 2 . Prin urmare, n reprezentarea n complement fat de 2,
eroarea se situeaz n domeniul
0 <
t
E (5.37)
Situaia descris anterior este reprezentat n figura 5.4.
n cazul reprezentrii numerelor negative n complement fa de 1
pe
n
b +1 bii, modulul numrului negativ este
=
=
n
n
b
i
b i
i
b A
1
1
2 2 1 (5.38)
Prin trunchierea la b+1 bii, modulul numrului negativ devine
=
=
b
i
b i
i
b A
1
2 2 1 , (5.39)
astfel nct diferena acestora este
( ) 0 2 2 2
2 2 2 2
1
1 1
1
=
= + =
+ =
n
n
n
n
b b
b
b i
i
i
b b
b
i
i
i
b
i
i
i
b
b b A A
(5.40)
Modulul numerelor negative descrete prin trunchiere, adic, de
fapt, acestea cresc. Situaia este ilustrat n Figura 5.5. care reprezint
272
trunchierea n reprezentarea semn - valoare. Prin urmare, domeniul n care
poate lua valori eroarea ce apare prin trunchierea numerelor negative
reprezentate n complement fa de 1 este
<
t
E 0 (5.41)
Figura 5.5. Relaia dintre valorile cuantizate i necuantizate n cazul trunchierii semn
valoare a) numere pozitive, b) numere negative, c) caracteristica de trunchiere n
semn valoare
n reprezentarea numerelor negative n formatul mrime cu semn,
biii care reprezint modulul numrului negativ sunt aceeai cu cei
corespunztori numrului pozitiv, diferind numai bitul de semn. Aceasta
nseamn c prin trunchierea unui numr negativ modulul acestuia scade,
iar valoarea trunchiat este dat de cel mai apropiat nivel de cuantizare
care nu este mai mic dect numrul, situaie reprezentat n Figura 5.5.
n continuare se va considera trunchierea mantisei n cazul
reprezentrii n virgul mobil.
( )
E
a a t t
M M x n x Q E 2 ]] [ [ = = (5.42)
n reprezentarea n complement fa de 2 a mantisei
0 <
a
M M (5.43)
sau 0 2 <
t
E
E (5.44)
Deoarece
a t
x E = , se obine
0 2 <
a
E
x (5.45)
273
sau 0 2 2 <
E
a
E
M (5.46)
care implic 0 <
a
M (5.47)
Dac
2
1
=
a
M se obine domeniul maxim al erorii relative , ca
fiind
0 2 < (5.48)
Dac
2
1
=
a
M , domeniul erorii relative este
< 2 0 (5.49)
n reprezentarea n complement fat de 1, eroarea de trunchiere
pentru valori pozitive ale mantisei este:
0 <
a
M M (5.50)
sau 0 2 <
t
E
E (5.51)
Cu
E
a a t
M x E 2 = = (5.52)
i
2
1
=
a
M se obine domeniul maxim al erorii relative pentru
a
M
pozitiv, ca fiind
0 2 < (5.53)
Pentru valori negative ale mantisei, eroarea este
<
a
M M 0 (5.54)
sau <
E
t
E 2 0 (5.55)
Pentru
2
1
=
a
M , domeniul maxim pentru eroarea relativ este
0 2 < , (5.56)
aceeai ca i pentru
a
M pozitiv.
Acest lucru este valabil, de asemenea, i pentru cazul n care
mantisa este reprezentat n formatul mrime cu semn.
5.3.2. Model statistic pentru cuantizarea fin
n calculele aritmetice ce implic cuantizare prin trunchiere sau
rotunjire, este convenabil s se adopte o metod statistic pentru
caracterizarea erorilor rezultate. Cuantizorul poate fi modelat prin
274
introducerea unui zgomot aditiv e[n] ce se suprapune peste semnalul x[n],
cu respectarea unor ipoteze ce vor fi specificate n cele ce urmeaz, adic
] [ ] [ ] [ ]] [ [ n e n x n x n x Q
q
+ = = (5.57)
unde e[n]= E
r
pentru rotunjire i e[n]= E
t
pentru trunchiere, iar
modelul este ilustrat n figura 5.6.
Figura 5.6. Modelul zgomotului aditiv pentru procesul liniar de cuantizare:
(a) sistemul real; (b) model de cuantizare
Cum ] [n x poate fi orice numr care se ncadreaz n domeniul
cuantizorului, eroarea de cuantizare este uzual modelat ca o variabil
aleatoare care se ncadreaz n limitele specificate anterior pentru erori.
Mai mult, n practic, b
n
>> b, deci mrimea 2
b
n
poate fi neglijat n
relaiile precedente. n aceste condiii, erorile de cuantizare ale numerelor
reprezentate n virgul fix i virgul mobil se ncadreaz n intervalele
prezentate n Tabelul 5.3.
Tabelul 5.3 Intervalele erorii de cuantizare
Tipul
cuantizrii
Tipul de
aritmetic
Numere
reprezentate
cu virgul fix
Numere
reprezentate
cu virgul mobil
Rotunjire
-Semn-valoare
-Complement
fa de 1
-Complement
fa de 2
-2
-b-1
E
r
2
-b-1
-2
-b
2
-b
Trunchiere
Complement
fa de 2
-2
-b
< E
t
0 -2
-b+1
< 0 , x > 0
0 < 2
-b+1
, x < 0
Trunchiere
semn-
valoare
-Complement
fa de 1
-Semn-valoare
-2
-b
< E
t
0 , x > 0
0 E
t
< 2
-b
, x < 0
-2
-b+1
< 0
275
n aceste condiii, funciile densitate de probabilitate pentru erorile
de rotunjire i trunchiere pentru formatele de reprezentare n virgul fix
prezentate sunt ilustrate n figura 5.7 [49]. Se observ c n cazul
trunchierii n formatul complement fa de doi, valoarea medie a erorii are
o deplasare de 2
b
/2, n timp ce pentru celelalte cazuri ilustrate anterior,
eroarea are o valoare medie nul.
Figura 5.7 Caracterizarea statistic a erorilor de cuantizare. Funciile densitate de
probabilitate ale (a) erorii de rotunjire; (b) erorii de trunchiere n formatul semn-valoare;
(c) erorii de trunchiere n formatul complement fa de doi
Analiza rezultatelor din Tabelul 5.3 i a expresiilor densitilor de
repartiie pentru erorile de rotunjire i trunchiere conduce la concluzia c
rotunjirea este preferat altor metode de cuantizare, din urmtoarele
motive[34]:
semnalul de eroare este independent de tipul de aritmetic;
media semnalului eroare este zero;
nici o alt metod de cuantizare nu conduce la o dispersie mai
mic.
Cuantizarea reprezint o operaie neliniar i ireversibil.
Efectele erorii de cuantizare datorate rotunjirii pot fi evideniate
dac e[n] se consider o secven aleatoare care satisface urmtoarele
proprieti:
276
1. Eroarea e[n] este uniform distribuit n domeniul ] 2 / , 2 / [ ,
2. Secvena de eroare {e[n]} este o secven de zgomot alb
staionar, pentru care e[n] i e[m], pentru m n, sunt necorelate.
3. Secvena de eroare {e[n]} este necorelat cu semnalul x[n].
Ipotezele de mai sus sunt ndeplinite cnd pasul de cuantizare este
mic i semnalul x[n] traverseaz mai multe nivele de cuantizare ntre dou
eantioane succesive. Efectul zgomotului aditiv, e[n], asupra semnalului
dorit poate fi studiat evalund raportul semnal-zgomot (SNR) care, pe
scar logaritmic (n decibeli), este
SNR
P
P
x
n
= 10
10
log (5.58)
unde P
x
este puterea semnalului, iar P
n
este puterea zgomotului de
cuantizare.
Dac eroarea de cuantizare este uniform distribuit n domeniul
(-/2, /2), aa cum este reprezentat n figura 5.7a, valoarea medie a
erorii este zero i dispersia (puterea zgomotului de cuantizare) este
12
2
12
1
) (
2 2 2 /
2 /
2
2 /
2 /
2 2
b
e n
de e de e p e P
= = =
(5.59)
Prin urmare, SNR este
SNR
P
P
P
x
n
x
b
= = + 10 10 10 12 2
10 10 10
2
log log log ( ) (5.60)
b P SNR
x
6 8 , 10 log 10
10
+ + = (5.61)
Aceast expresie pentru SNR indic faptul c fiecare bit folosit n
convertorul A/D sau cuantizor, mrete raportul semnal/zgomot de
cuantizare cu 6 dB sau reduce puterea zgomotului de cuantizare cu 6 dB.
De exemplu, dac se stabilete nivelul puterii zgomotului de
cuantizare la 70 dB fa de nivelul puterii semnalului, trebuie folosit un
cuantizor pe 10 bii (sau convertor pe 10 bii).
Pentru a analiza efectul zgomotului de cuantizare asupra
rspunsului unui sistem discret, liniar, invariant n timp, se consider un
astfel de sistem caracterizat de funcia pondere ] [n h , la intrarea cruia se
aplic semnalul cuantizat ] [ ] [ ] [ n e n x n x
q
+ = . Datorit liniaritii
sistemului, ieirea sa este suma rspunsurilor sistemului la semnalul
necuantizat ] [n x i la eroarea de cuantizare ] [n e . Notnd semnalul de
277
ieire datorat zgomotului sau erorii de cuantizare cu ] [n z , conform figurii
5.8, se poate scrie
=
=
n
k
k n e k h n z
0
] [ ] [ ] [ (5.62)
relaie din care poate fi determinat dispersia zgomotului de ieire cauzat
de eroarea de cuantizare.
Figura 5.8. Model pentru eroarea datorat cuantizrii semnalului de intrare
a) Modelul de eroare, b) ieirea datorat zgomotului de cuantizare
b)
n cazul cuantizrii prin rotunjire, innd seama de ipotezele
asumate pentru eroare i de relaia (5.59), dispersia fiecrui termen din
suma (5.62) este
] [
12
] [
2
2
2 2
k h k h
e
= (5.63)
Deoarece dispersia unei sume de variabile aleatoare independente
este egal cu suma dispersiilor lor, rezult c, n ipoteza c erorile de
cuantizare s-au presupus independente la diferite momente de timp,
dispersia ieirii ] [n z este
=
n
k
z
k h n
0
2
2
2
0
] [
12
] [ (5.64)
Dispersia crete pn la o valoare de regim permanent cu condiia
ca filtrul s fie stabil. Dispersia de regim permanent se calculeaz cu
relaia
= =
0
2
2
2
0
2
] [
12
] [ lim
k
z
n
ozss
k h n ( 5.65)
278
O alt form pentru expresia dispersiei de regim permanent a
ieirii poate fi obinut cu ajutorul funciei de sistem a filtrului, ( ) z H , n
felul urmtor:
( )
=
0
] [
k
k
z k h z H ( 5.66)
( )
=
0
1
] [
m
m
z m h z H ( 5.67)
Prin urmare,
( ) ( )
=
=
0 0
1
] [ ] [
k m
k m
z m h k h z H z H ( 5.68)
Multiplicnd ambii membri cu
1
z i integrnd dup z pe un
contur nchis ce conine originea n planul z, rezult
( ) ( )
=
=
c
k m
k m
c
dz z m h k h dz z z H z H
0 0
1 1 1
] [ ] [ ( 5.69)
Cnd conturul c este n regiunea de convergen pentru ( ) z H i ( )
1
z H ,
se poate schimba ordinea de sumare i integrare din membrul drept. Se
observ c cercul unitate este inclus n domeniul rezultat din intersecia
regiunilor de convergen pentru ( ) z H i ( )
1
z H , cu condiia ca ( ) z H s
fie stabil. Astfel se justific alegerea cercului unitate drept contur de
integrare. Relaia (5.69) devine
( ) ( )
=
=
c
k m
k m
c
dz z m h k h dz z z H z H
1
0 0
1 1
] [ ] [ (5.70)
Deoarece conturul de integrare conine originea planului Z,
conform teoremei lui Cauchy [48]
=
=
k m
k m j
dz z
c
k m
0
2
1
( 5.71)
Cu (5.71), relaia (5.70) devine
( ) ( )
=
=
0
2 1 1
] [ 2
k
c
k h j dz z z H z H ( 5.72)
i, deci,
( ) ( )
=
=
c
k
dz z z H z H
j
k h
1 1
0
2
2
1
] [
(5.73)
Din (5.65) i (5.73) rezult urmtoarea expresie pentru dispersia
de regim permanent
279
( ) ( )
=
unitate cercul
din polii
ozss
z z H z H lui e reziduuril
1 1
2
2
12
, (5.74)
expresie care, de multe ori, este mai uor de evaluat dect (5.65).
Exemplul 5. 7.
S se determine dispersia de regim permanent a zgomotului de la
ieirea unui sistem cauzal, stabil, de ordinul nti, datorat cuantizrii
semnalului de intrare.
Soluie. Ecuaia cu diferene care caracterizeaz sistemul este
] [ ] 1 [ ] [ n x n Ay n y + = , cu 1 | | < A . Rspunsul la impuls al acestui sistem
este ] [ ] [ n u A n h
n
= . Din (5.65) rezult dispersia zgomotului de ieire
2
) 1 ( 2 2
0
2
2
2
1
1
12 12
] [
A
A
A n
n n
k
k
oz
=
+
=
Dispersia de regim permanent, cnd n , este
( )
2
2
2
0
1 12 A
zss
= .
( )
1
1
1
=
z A
z H , cu un pol n A z = , i ( )
z A
z H
1
1
1
cu un pol n
A
z
1
= n afara cercului unitate. Conform relaiei (5.74) rezult
( )
2
2
1
2
2
0
1 12 1
1
12 A
z
Az A z
z
lui e reziduuril
A z
zss
=
|
|
.
|
\
|
=
=
identic, evident, cu expresia obinut anterior.
Pentru sisteme de ordin superior este mai uor a se folosi relaia (5.74)
dect (5.65) din cauza complexitii expresiei rspunsului la impuls.
5.4. Erori cauzate de cuantizarea coeficientilor
filtrelor
5.4.1. Efectul cuantizrii parametrilor filtrului asupra
stabilitii. Analiza senzitivitii la cuantizarea
coeficienilor filtrelor IIR
Pentru a asigura stabilitatea unui filtru recursiv cauzal, toi polii
acestuia trebuie s fie n interiorul cercului unitate din planul Z. n multe
280
cazuri este de dorit ca un pol sau o pereche de poli s fie n apropierea
cercului unitate. Dac n acest caz pasul de cuantizare este att de mare
nct reprezentarea polilor s fie pe sau n afara cercului unitate, filtrul
astfel implementat devine instabil.
Fie, de exemplu, un filtru de ordinul nti
| | | | | | n x n y A n y + = 1 (5.75)
i fie N =b+1, numrul biilor disponibili reprezentrii coeficientului A
care, pentru un filtru stabil, este cuprins n domeniul 1 1 < < A .
Mrimea pasului de cuantizare este
b
= 2 . Dac A =1 este
distana de la pol la cercul unitate, cea mai mic valoare a lui care
poate fi precis reprezentat este
b
= 2 . Pentru asigurarea stabilitii
trebuie ca pasul de cuantizare s fie mai mic sau egal cu distana de la pol
la cercul unitate, , adic ) 1 ( 2
1
A
N
+
, de unde rezult
( )
1
2 log
1 log
1
2 log
log
10
10
10
10
+
= +
A
N
(5.76)
Exemplul 5. 8.
a) Fie
aT
e A
= , unde s rad a 1 = ,
3
10 = T secunde. Dac se
folosete trunchierea ca metod de cuantizare, s se determine numrul
minim de bii, N, necesar reprezentrii lui A, astfel nct s nu rezulte
instabilitate.
b) Dac sunt disponibili 9 bii i
3
10 = T secunde, s se gseasc
a, astfel nct filtrul s fie stabil.
Soluie. a) T a e A
aT
=
1 1 , prin urmare, bii 11 1
2 log
log
10
10
= +
T a
N
b)
( )
1
3 . 0
10 log
9
3
10
+
=
a
care necesit secund rad 4 = a .
Pentru filtrele de ordin superior localizarea polilor depinde, n
general, de mai muli coeficieni. Pentru a ilustra efectul cuantizrii
coeficienilor asupra localizrii polilor i, implicit, asupra caracteristicii
de frecven, fie un filtru IIR cu funcia de sistem
+
=
N
k
k
k
M
k
k
k
z a
z b
z H
1
0
1
) ( (5.77)
281
Filtrul IIR cu coeficieni cuantizai are funcia de sistem
H z
b z
a z
k
k
k
M
k
k
k
N
( ) =
+
0
1
1
(5.78)
unde coeficienii cuantizai { b
k
} i { a
k
} pot fi exprimai n funcie de
coeficienii necuantizai {b
k
} i {a
k
} prin relaiile
a a a
b b b
k k k
k k k
= +
= +
k N
k M
=
=
1 2
0 1
, ,...,
, ,...
(5.79)
{b
k
} i {a
k
} reprezentnd erorile de cuantizare ale coeficienilor.
Numitorul lui H(z) poate fi exprimat n forma
D z a z p z
k
k
k
N
k
k
N
( ) ( ) = + =
=
1 1
0
1
1
(5.80)
unde {p
k
} sunt polii lui H(z). Similar, se poate descompune numitorul lui
H z ( ) n forma
D z p z
k
k
N
( ) ( ) =
=
1
1
1
(5.81)
unde p p p
k k k
= + , k=1, 2, ..., N, i p
k
este eroarea sau perturbaia care
rezult din cuantizarea coeficienilor filtrului.
n continuare, se urmrete a se exprima perturbaia total p
i
a
polului p
i
, n funcie de eroarea de cuantizare {a
k
} a coeficienilor.
Perturbaia p
i
poate fi exprimat ca [48]
p
p
a
a
i
i
k
k
k
N
=
=
1
(5.82)
unde
k
i
a
p
reprezint variaia poziiei polului p
i
determinat de variaia
coeficientului a
k
. Astfel, eroarea total este exprimat ca o sum a erorilor
datorate schimbrilor n fiecare din coeficienii {a
k
}.
Derivatele pariale p a
i k
/ , k=1, 2, ..., N, pot fi obinute
difereniind D(z) n funcie de fiecare {a
k
}, dup cum urmeaz [48]:
D z
a
D z
z
p
a
k
z p
z p
i
k
i
i
( ) ( ) |
\
|
.
| =
|
\
|
.
|
|
\
|
.
|
=
=
(5.83)
Din (5.83) rezult
282
( )
( )
p
a
D z a
D z z
i
k
k
z p
z p
i
i
=
=
=
( ) /
( ) /
(5.84)
Numrtorul relaiei (5.84) este
D z
a
z p
k
z p
k
z p
i
k
i
i
( ) |
\
|
.
| = =
=
=
(5.85)
Numitorul relaiei (5.84) este
=
)
`
= |
.
|
\
|
=
=
=
i
i p z
N
l
l
p z
z p
z z
z D
1
1
) 1 (
) (
=
=
=
=
N
i l
l
l i
N
i
p z
N
k
N
k l
l
l
k
p p
p
z p
z
p
i
1 1 1
1
2
) (
1
) 1 ( (5.86)
Prin urmare, relaia (5.84) poate fi exprimat sub forma
p
a
p
p p
i
k
i
N k
i l
l
l i
N
=
( )
1
(5.87)
nlocuind rezultatul din (5.87) n (5.82) rezult eroarea total de
perturbaie p
i
n forma
p
p
p p
a
i
i
N k
i l
l
l i
N k
k
N
=
( )
1
1
(5.88)
Aceast expresie ofer o msur a senzitivitii polului p
i
la o
schimbare a coeficienilor {a
k
}.
Un rezultat analog se poate obine pentru senzitivitatea zerourilor
la erorile cauzate de cuantizarea parametrilor {b
k
}.
Termenii (p
i
- p
l
) din numitorul relaiei (5.88) reprezint vectori, n
planul Z, orientai de la polii {p
l
} la polul {p
i
}. Dac polii sunt foarte
grupai, ca n cazul unui filtru de band ngust reprezentat n figura 5.9,
lungimile p
i
- p
l
| vor fi mici pentru polii din vecintatea lui p
i
. Aceste
lungimi mici vor contribui la erori mari i va rezulta o perturbaie p
i
mare. Eroarea p
i
poate fi minimizat prin maximizarea lungimii p
i
- p
l
|.
283
Figura 5.9 Poziii ale polilor unui filtru IIR trece band
Acest lucru se poate realiza prin implementarea filtrelor de ordin
mare cu celule cu un singur pol sau cu doi poli. Fltrele cu un singur pol (i
un singur zero) au valori complexe pentru coeficieni i necesit operaii
aritmetice n complex pentru realizarea lor. Aceast problem poate fi
evitat combinnd polii i zerourile complex conjugate, pentru a forma
seciuni de filtru de ordin doi cu coeficieni reali. Deoarece polii complex
conjugai sunt suficient de deprtai, eroarea de cuantizare p
i
este
minimizat i, n consecin, filtrul cu coeficienii cuantizai rezultat
aproximeaz mai bine caracteristica rspunsului n frecven a filtrului cu
coeficienii necuantizai.
Exemplul 5. 9.
Un filtru digital de ordinul doi are polii reali
1
p i
2
p . Acesta
este implementat n forma direct. Se cere:
a) Din relaia general (5.82) s se scrie o relaie pentru modificarea
poziiei polilor datorat modificrilor coeficienilor ecuaiei cu
diferene corespunztoare.
b) Dac 98 , 0
1
= p i 94 , 0
2
= p , care este numrul minim de bii
necesar ca filtrul s rmn stabil n urma cuantizrii coeficienilor?
Metoda de cuantizare se presupune a fi rotunjirea.
Soluie. a) Din (5.87) rezult
( )
2
1
2
i l
l
l i
k
i
k
i
p p
p
a
p
, 2 , 1 = k i 2 , 1 = i .
2 1
1
1
1
p p
p
a
p
2 1 2
1
1
p p a
p
284
1 2
2
1
2
p p
p
a
p
1 2 2
2
1
p p a
p
variaia total n poziia polilor este
k
k k
i
i
a
a
p
p
=
=
2
1
adic | |
2 1 1
2 1
2
2
1
1
1
1
1
1
a a p
p p
a
a
p
a
a
p
p +
=
i | |
2 1 2
1 2
2
2
2
1
1
2
2
1
a a p
p p
a
a
p
a
a
p
p +
=
b)Este necesar a determina
1
a i
2
a . Numitorul funciei de
transfer a filtrului are forma ( )( )
2 1
2
2 1
a z a z p z p z + = unde
2 1 1
p p a + = i
2 1 2
p p a = . Pentru asigurarea stabilitii trebuie ca
2 2
1
< < a i 1 1
2
< < a [63]. n aritmetica n virgul fix
coeficientul
1
a poate fi scalat pentru a se obine un numr fracionar, dei
pentru coeficienii filtrului virgula binar este adesea mutat spre dreapta
pentru a adapta coeficienii la mrimi mai mari ca unitatea. n orice caz se
poate calcula pasul de cuantizare i numrul de bii, N=b+1.
Pentru
1
a ,
N
2
4
= i pentru rotunjire
N
a
2
2
2
1
=
=
S-ar putea alege acelai pas de cuantizare i pentru
2
a , caz n care
ar fi necesari N - 1 bii deoarece domeniul lui
2
a este jumtate din cel
pentru
1
a . n schimb, s-ar putea adopta N bii pentru ambele registre,
pentru
1
a i
2
a i pasul de cuantizare pentru
2
a s fie
2 2
2
=
N
, astfel
nct, pentru rotunjire
N
a
2
1
4
2
= = .
Pentru ultima alegere, din expresia menionat anterior pentru
schimbarea poziiei polului rezult
( ) | |
N N
p 2 74 2 0 , 1 2 98 , 0
94 , 0 98 , 0
1
1
= +
= i
( ) | |
N N
p 2 72 2 0 , 1 2 94 , 0
98 , 0 94 , 0
1
2
= +
=
285
Polul
1
p , fiind mai apropiat de cercul unitate este posibil s
cauzeze instabilitatea filtrului, dac nu este reprezentat adecvat. Pentru
stabilitate, trebuie s fie ndeplinit relaia
N
p p 2 74 02 , 0 1
1 1
= > =
sau 3700 2 >
N
, care implic N=12 bii lungimea minim a registrului.
Pentru a completa analiza, este necesar a considera i cazul polilor
complex conjugai n expresia funciei de transfer (5.77). Numitorul
acesteia se poate scrie
( ) ( ) | |
=
=
+ = +
s
k
k k k
q
i
i
N
k
k
k
z r z r z p z a
1
2 2 1
1
1
1
cos 2 1 1 1 (5.89)
unde
2
q N
s
= , cu q poli simpli i s perechi de poli complex conjugai.
Difereniind (5.89) n raport cu
l
a , cu N l 1 se determin
senzitivitatea la cuantizarea coeficienilor
l
m
a
p
, q m 1 i
l
g
a
r
, i
l
g
a
, s g 1 . Dup cteva prelucrri matematice rezult pentru polii
simpli p
m
, q m 1 [58]
( ) ( ) | |
=
+
+
=
s
k
m k m k k
q
m i
i
m i
l
m
l
m
p r p r p p
p
a
p
1
2 2 1
1
1
1
cos 2 1 1
, (5.90)
i pentru polii compleci
g
e r
g
, s g 1
( ) | |
g g
g
l
g
l
g
C
l r
a
r
sin 2
1 sin
1
=
+
(5.91)
( ) | | ( ) | | { }
g g
g g g
l
g
l
g
C
l l r
a
2
sin 2
1 sin cos 2 sin
=
(5.92)
unde
( ) ( )
=
=
=
+ =
N
g k
k
e r z
k k k
q
i
i g g
j
g
z r z r z p C
1
2 2 1
1
1
cos 2 1 1
(5.93)
Deviaiile totale sunt
286
q l a
a
p
p
l
N
l l
m
i
, , 1
1
=
=
=
(5.94)
s g a
a
r
r
l
N
l l
g
g
, , 1
1
=
=
=
(5.95)
s g a
a
l
N
l l
g
g
, , 1
1
=
=
=
(5.96)
Din nou se observ c, dac polii sunt grupai, ca n cazul filtrelor
de band ngust, polii realizrii n forma direct sunt sensibili la erorile
de cuantizare a coeficienilor i, cu ct este mai mare numrul de poli
grupai, cu att i senzitivitatea este mai mare.
Este interesant de observat modul n care influeneaz structura de
implementare a filtrului erorile cauzate de cuantizarea coeficienilor.
Pentru a ilustra acest lucru, fie un filtru cu doi poli complex conjugai,
caracterizat de funcia de sistem
H z
r z r z
( )
( cos )
=
+
1
1 2
1 2 2
(5.97)
Filtrul are polii la z
1,2
= re
j
. Cnd este realizat ca n figura 5.10,
exist doi coeficieni: a
1
= 2rcos i a
2
= r
2
. Cu precizie infinit este
posibil s obinem un numr infinit de poziii ale polilor. Evident, cu
precizie finit (adic a
1
i a
2
cuantizai), poziiile posibile ale polilor sunt
n numr finit.
Figura 5.10. Realizare direct a unui filtru cu doi poli
De exemplu, pentru b=3, sunt posibile 7 valori nenule pentru a
1
i
a
2
. n figura 5.11 sunt reprezentate poziiile posibile ale polilor, numai
pentru primul cadran al planului z. Sunt posibile 40 de poziii ale polilor
n acest caz. Neuniformitatea n poziia polilor este datorat faptului c se
cuantizeaza r
2
iar polii se gsesc pe un arc de cerc de raz r. Pentru o
anumit cuantizare a coeficienilor, polii se afl pe o gril din planul z
287
definit de intersecia cercurilor concentrice corespunztoare cuantizrii
lui r
2
i liniilor verticale corespunztoare cuantizrii lui 2rcos. De
importan particular este setul rar de poli, pentru apropiat de zero i,
datorit simetriei, pentru n apropierea lui . Aceast situaie va fi critic
nefavorabil pentru filtrele trece jos i filtrele trece sus care au n mod
normal polii grupai in jurul frecventei unghiulare =0 i, respectiv, =.
Fig. 5.11 Poziii posibile ale polilor structurii de ordinul doi n planul Z, pentru
cuantizarea pe trei bii
O alternativ n realizarea filtrelor cu doi poli este forma cuplat,
reprezentat n figura 5.12.
Figura 5.12. Realizare n forma cuplat a filtrului IIR cu doi poli
Cele dou ecuaii cuplate sunt:
] 1 [ ) cos ( ] 1 [ ) sin ( ] [
] 1 [ ) sin ( ] 1 [ ) cos ( ] [ ] [
1
1 1
+ =
+ =
n y r n y r n y
n y r n y r n x n y
(5.98)
288
Transformnd aceste ecuaii n domeniul Z, se poate scrie
Y z
X z
H z
r z
r z r z
( )
( )
( )
( sin )
( cos )
= =
+
1
1 2 2
1 2
(5.99)
n forma cuplat se observ c sunt de asemenea doi coeficieni,
1
= r sin i
2
= r cos. Deoarece ambii sunt liniari n r, poziiile
posibile ale polilor sunt acum puncte egal spaiate pe un caroiaj
dreptunghiular, ca n figura 5.13.
Figura 5.13. Poziii posibile ale polilor filtrului cu doi poli, realizat n forma
cuplat din figura 5.12
Ca urmare, poziionarea polilor este acum uniform distribuit n
interiorul cercului, lucru mult mai favorabil dect realizarea precedent,
mai ales pentru filtrele trece jos. Preul pltit pentru aceast distribuire
uniform a poziiei polilor este o cretere a volumului de calcule.
Realizarea n form cuplat necesit patru multiplicri, cte dou pentru
fiecare ieire, n timp ce realizarea din figura 5.10 necesit doar dou
multiplicri. Este interesant de observat faptul c pentru o anumit
lungime a coeficienilor, forma direct permite o plasare mai adecvat a
polilor cu r apropiat de unitate i mare, pe cnd forma cuplat este mai
avantajoas pentru mic.
Deoarece sunt diverse metode de a realiza seciunile de ordin doi
ale filtrelor, este, de asemenea, clar c sunt multe posibiliti pentru
localizarea polilor n cazul coeficienilor cuantizai. Ideal ar fi s se
selecteze o structur care conduce la un set dens de puncte n regiunea
unde se afl polii. Din nefericire nu exist o metod simpl i sistematic
pentru determinarea realizrii filtrului care s duc la rezultatul dorit.
Avnd dat un filtru IIR de ordin nalt care trebuie implementat ca
o combinaie de seciuni de ordinul doi, va trebui s se decid ntre o
structur n cascad i una n paralel, adic ntre realizarea
289
H z
b b z b z
a z a z
k k k
k k k
K
( ) =
+ +
+ +
=
0 1
1
2
2
1
1
2
2
1
1
(5.100)
i realizarea
H z
c c z
a z a z
k k
k k k
K
( ) =
+
+ +
=
0 1
1
1
1
2
2
1
1
(5.101)
Dac filtrul IIR are zerouri pe cercul unitate, cum este cazul
filtrelor eliptice i Cebyshev de tipul doi, fiecare seciune de ordin doi din
configuraia n cascad din (5.100) conine o pereche de zerouri complex
conjugate. Coeficienii {b
ki
} din (5.100) determin n mod direct poziiile
acestor zerouri, iar cuantizarea lor tinde s le deplaseze de pe cercul
unitate. Senzitivitatea rspunsului sistemului la eroarea de cuantizare este
uor i direct controlabil prin alocarea unui numr suficient de bii pentru
reprezentarea coeficienilor cuantizai {b
ki
} cu o precizie specificat.
Astfel va exista control direct asupra polilor i zerourilor care rezult din
procesul de cuantizare. De fapt, se poate evalua efectul perturbrii
rezultate din cuantizarea coeficienilor {b
ki
}, cu o anumit precizie cerut.
Realizarea n paralel a lui H(z), conform relaiei (5.101), asigur
un control direct doar asupra polilor sistemului. Coeficienii
numrtorului {c
k0
} i {c
k1
} sunt obinui prin descompunerea n fracii
simple a lui H(z). Prin urmare polii influeneaz indirect localizarea
zerourilor, prin combinarea tuturor termenilor din descompunerea n
fracii simple a lui H(z) i, n consecin, este mult mai dificil a se
determina efectul erorii de cuantizare datorat coeficienilor {c
ki
}, n
localizarea zerourilor sistemelor.
Cuantizarea parametrilor {c
ki
} poate produce o perturbaie
semnificativ a poziiilor zerourilor i, de obicei, va fi suficient de mare n
implementrile cu virgul fix pentru a deplasa zerourile de pe cercul
unitate. Aceasta este o situaie foarte neplcut, care poate fi ns
remediat folosind o reprezentare n virgul mobil. n orice caz, structura
n cascad este mult mai robust n prezena cuantizrii coeficienilor i
trebuie s fie alegerea preferat n aplicaii practice, mai ales unde este
folosit reprezentarea n virgul fix.
290
5.4.2. Cuantizarea coeficienilor filtrelor FIR
Aa cum s-a artat i n seciunea precedent, analiza senzitivitii
aplicat polilor unui sistem se aplic direct i zerourilor filtrelor IIR. Prin
urmare, o expresie asemntoare cu relaia (5.88) se poate obine pentru
zerourile unui filtru FIR. Pentru a minimiza senzitivitatea la cuantizarea
coeficienilor, va trebui ca filtrul FIR cu un numr mare de zerouri s fie
implementat ca o cascad de seciuni de ordinul unu i doi.
Un aspect important n practic l reprezint filtrele FIR cu
rspuns liniar de faz. Realizrile directe ale unor astfel de filtre menin
proprietatea de faz liniar chiar i n cazul cuantizrii coeficienilor.
Aceasta rezult din observaia c funcia de sistem a unui filtru FIR de
faz liniar satisface proprietatea
H z z H z
M
( ) ( )
(
=
1) 1
, (5.102)
indiferent dac coeficienii sunt sau nu, cuntizai.
Prin urmare, cuantizarea coeficienilor filtrului FIR afecteaz doar
caracteristica de amplitudine.
Din practic se tie c pentru a reprezenta coeficienii unui filtru
FIR de faz liniar de lungime moderat (M=32 256) sunt necesari cel
puin 10 bii, dar, dac este posibil, se prefer a se folosi 12 pn la 14
bii. Cu creterea lungimii filtrului trebuie s creasc i numrul de bii
pentru reprezentarea coeficienilor, pentru a menine aceeai eroare n
rspunsul n frecven al filtrului. Se presupune, de exemplu, c fiecare
coeficient al filtrului este rotunjit la (b+1) bii. Prin urmare, eroarea de
rotunjire se ncadreaz n domeniul: 2
b
/2 < e
r
[n] < 2
b
/2 .
Valoarea cuantizat a rspunsului la impuls poate fi reprezentat
ca ] [ ] [ ] [ n e n h n h
r q
+ = i eroarea n rspunsul n frecven este
=
1
0
] [ ) (
M
n
n j
r M
e n e E
(5.103)
Presupunnd c e
r
[n] este o variabil aleatoare uniform distribuit
n intervalul [-2
-b
/2, 2
-b
/2] cu valoarea medie zero, E
M
() va fi, de
asemenea, de medie zero. Presupunnd, n continuare, c e
r
[n] poate fi
modelat ca o secven de zgomot alb staionar, secvena erorilor e
r
[n],
0 n M1, are eantioanele necorelate. Prin urmare, dispersia erorii n
rspunsul n frecven E
M
() este suma dispersiilor celor M termeni e
r
[n]
M
b
E
12
2
2
2
= (5.104)
291
Ecuaia (5.104) subliniaz faptul c dispersia erorii crete liniar cu
lungimea filtrului M. Deviaia standard a erorii E
M
() este
M
b
E
12
2
= (5.105)
Prin urmare, pentru fiecare cretere de patru ori a lui M, precizia n
reprezentarea coeficienilor filtrului trebuie crescut cu un bit, pentru a
menine deviaia standard fix. Din practic se constat c pentru a avea
o deviaie standard acceptabil se folosesc 12, 13 bii. Dac lungimea
filtrului, M, este mai mare dect 256 sau numrul de bii folosii pentru
reprezentarea coeficienilor este mai mic de 12, atunci filtrul trebuie
implementat ca o cascad de seciuni de filtre de lungimi mai mici.
ntr-o realizare n cascad, de forma
H z G H z
k
k
K
( ) ( ) =
=
1
(5.106)
seciunile de ordinul doi sunt:
H z b z b z
k k k
( ) = + +
1
1
1
2
2
. (5.107)
Coeficienii au forma b r
k k k 1
2 = cos i b r
k k 2
2
= . Cuantizarea lui b
k1
i
b
k2
conduce la localizarea zerourilor ca n figura 5.11, cu excepia faptului
c grid-ul se extinde n afara cercului unitate.
Ecuaia (5.102) arat c zerourile lui H(z
-1
) sunt identice cu cele
ale lui H(z). Dac H(z) are un zerou complex z r e
k
j
k
=
atunci H(z)
trebuie s aib i o imagineoglind a acestuia, adic zeroul
z r e
k
j
k
=
1
1 ( / )
. Pe de alt parte, dac rspunsul la impuls este real,
zerourile complexe ale lui H(z) apar n perechi conjugate. Problema care
apare n acest caz este meninerea proprietii de faz liniar, deoarece
perechea de zerouri cuantizate
k
j
k
e r z
= ) / 1 (
4 , 3
poate s nu fie imaginea
n oglind a perechii de zerouri cuantizate
k
j
k
e r z
=
2 , 1
.
Aceast problem poate fi evitat prin rearanjarea termenilor
corespunztori imaginii n oglind. Se pot scrie astfel coeficienii imaginii
n oglind, sub forma
( )
1
2 1 1
2
1
2
2
2
2 1 2
+
|
\
|
.
| = +
r
z
r
z
r
r r z z
k
k
k k
k k k
cos cos (5.108)
292
Factorul {1/r
k
2
} poate fi combinat cu ctigul total G, sau poate fi
distribuit n seciunile de filtru de ordin doi. Termenul din (5.108) conine
exact aceeai parametri ca i factorul ( cos ) 1 2
1 2 2
+
r z r z
k k k
i, prin
urmare, zerourile apar acum n perechi imagine-oglind chiar dac
coeficienii sunt cuantizai.
5.5. Erori cauzate de cuantizarea produselor.
Caracterizarea statistic a efectelor cuantizrii n
realizarea n virgul fix a filtrelor digitale
Multiplicarea a dou numere reprezentate pe b bii fiecare,
exceptnd bitul de semn, are ca rezultat un numr reprezentat pe 2b bii.
n practic, datorit lungimii finite a registrelor cu care se lucreaz, se
impune exprimarea produselor prin b bii semnificativi, astfel nct,
inevitabil, cuantizarea este asociat cu formarea produsului. Indiferent de
tipul de cuantizare folosit, s-a ncetenit ca acesta s se numeasc
rotunjirea produsului. Efectul acestei cuantizri asupra performanelor
filtrului depinde de modul de implementare a acestuia.
Se presupune c eroarea de rotunjire asociat formrii produsului
este independent de la o iteraie la alta, astfel nct poate fi folosit
modelul cuantizrii fine, sursele de zgomot fiind introduse n sistem dup
multiplicatoare. Astfel, multiplicatorul este modelat cu o operaie n
precizie infinit urmat de o surs de zgomot aditiv e[n], aa nct
rezultatul final s fie egal cu un nivel de cuantizare, exact cum s-a
procedat la caracterizarea erorii de cuantizare la conversia A/D a unui
semnal analogic.
Se ncepe cu caracterizarea zgomotului de rotunjire ntr-un filtru
cauzal, cu un singur pol, care este implementat n aritmetica cu virgul
fix i este descris de ecuaia neliniar cu diferene
] [ ]] 1 [ [ ] [ n x n av Q n v
r
+ = (5.109)
Efectul rotunjirii produsului av[n-1] este modelat cu o secven de
zgomot e[n] adunat la produsul necuantizat av[n-1], care este
] [ ] 1 [ ]] 1 [ [ n e n av n av Q
r
+ = (5.110)
Cu acest model pentru eroarea de cuantizare, sistemul considerat
este descris de ecuaia liniar cu diferene
] [ ] [ ] 1 [ ] [ n e n x n av n v + + = (5.111)
Sistemul corespunztor este ilustrat n diagrama bloc din figura 5.14.
293
Figura 5.14. Modelul zgomotului aditiv pentru eroarea de cuantizare a produsului pentru
un filtru cu un singur pol
Secvena de ieire a filtrului v[n], poate fi separat n dou
componente. Prima este rspunsul sistemului, y[n], la secvena de intrare
x[n], iar a doua este rspunsul sistemului, z[n], la zgomotul aditiv de
cuantizare e[n]. Secvena de ieire se exprim ca o sum a acestor dou
componente, adic
] [ ] [ ] [ n z n y n v + = (5.112)
nlocuind v[n] din (5.112) n (5.111), se obine
] [ ] [ ] 1 [ ] 1 [ ] [ ] [ n e n x n az n ay n z n y + + + = + (5.113)
Pentru a simplifica analiza, se fac urmtoarele presupuneri n
legtur cu eroarea e[n]:
1. Pentru orice n, secvena de eroare {e[n]} este uniform distribuit n
intervalul |
.
|
\
|
b b
2
2
1
, 2
2
1
. Aceasta implic valoarea medie a lui
{e[n]} egal cu zero, i dispersia
12
2
2
2
b
e
= (5.114)
2. Eroarea {e[n]} este o secven staionar de zgomot alb i, ca urmare,
e[n] i e[m] sunt necorelate pentru nm.
3. Secvena de eroare {e[n]} este necorelat cu semnalul {x[n]}.
Ultima presupunere permite separarea ecuaiei cu diferene (5.113)
n dou ecuaii independente:
] [ ] 1 [ ] [ n x n ay n y + = (5.115)
] [ ] 1 [ ] [ n e n az n z + = (5.116)
Ecuaia cu diferene (5.115) reprezint relaia de intrare-ieire
pentru sistemul dorit, iar cea din (5.116) reprezint relaia pentru eroarea
de cuantizare la ieirea sistemului.
294
Pentru a completa analiza se face apel la dou relaii importante.
Prima este relaia pentru valoarea medie a ieirii z[n] pentru un filtru
liniar, invariant n timp, cu rspunsul la impuls h[n], cnd este excitat de o
secven e[n] cu media m
e
. Rezultatul este [48]
=
=
0
] [
n
e z
n h m m (5.117)
sau, echivalent,
) 0 ( H m m
e z
= (5.118)
unde H(0) valoarea rspunsului n frecven H() la = 0.
Deoarece eroarea de cuantizare datorat rotunjirii are media zero,
valoarea medie a erorii la ieire este m
z
=0.
A doua relaie important este expresia pentru secvena de
autocorelaie a ieirii z[n] a unui filtru cu rspunsul la impuls h[n] la
secvena aleatoare de intrare e[n]. Aceasta este [63]
=
=
+ =
0 0
] [ ] [ ] [ ] [
l
ee
k
zz
n l k l h k h n (5.119)
unde ] [n
ee
este funcia de autocorelaie a secvenei de intrare e[n].
n cazul particular cnd secvena aleatoare este zgomot alb,
secvena de autocorelaie
ee
[n] este un impuls scalat cu dispersia
e
2
,
adic [34]
] [ ] [
2
n n
e ee
= (5.120)
Dup substituia relaiei (5.120) n (5.119), se obine secvena de
autocorelaie de la ieirea filtrului excitat cu zgomot alb
=
+ =
0
2
] [ ] [ ] [
k
e zz
n k h k h n (5.121)
Dispersia
2
z
a zgomotului de ieire este obinut evalund
zz
[n]
la n = 0, adic [34]
=
=
k
e z
k h ] [
2 2 2
(5.122)
sau, cu ajutorul teoremei lui Parseval [63], expresia alternativ
d H
e
z
2
2
2
) (
2
= (5.123)
n cazul filtrului cu un singur pol, rspunsul la impuls este
295
] [ ] [ n u a n h
n
= (5.124)
Dispersia erorii la ieirea filtrului rezult
2
2
0
2 2 2
1 a
a
e
k
k
e z
= =
(5.125)
Se observ c puterea zgomotului
2
z
la ieirea filtrului este
mrit fa de puterea zgomotului de la intrare,
2
e
, cu factorul 1/(1a
2
).
Acest factor crete odat cu apropierea polului de cercul unitate.
Fie, n continuare, un filtru recursiv de ordinul doi:
| | | | | | | | | | 1 2 1
1 0 2 1
+ + = n x b n x b n y a n y a n y (5.126)
n calculul ieirii sunt implicate patru multiplicri, dac
1
a ,
2
a ,
0
b
i
1
b nu sunt egali cu unitatea. Zgomotul de rotunjire asociat cu fiecare
multiplicare este | | n e
i
, 3 , 0 = i .
Se consider nti realizarea n forma direct I, ca n figura 5.15.
Fig. 5.15. Zgomotul de rotunjire la multiplicare pentru un filtru de ordinul doi
n forma direct I
Deoarece toate sursele de zgomot se adun n acelai punct,
acestea pot fi nlocuite cu o surs de zgomot echivalent
| | | |
=
=
3
0 i
i
n e n e (5.127)
Se observ c n implementarea n forma direct I, zgomotul trece
numai prin partea de sistem ce conine numai poli, adic zerourile nu au
nici un efect asupra zgomotului din ieire.
n cazul rotunjirii, cnd pasul de cuantizare este constant, dispersia
unei surse de zgomot este
296
3 , 2 , 1 , 0 ,
12
2
2
=
= i
i
e
. (5.128)
Presupunnd erorile de cuantizare independente, dispersia
zgomotului rezultat este suma dispersiilor componentelor
3
2 3
0
2 2
= =
= i
e e
i i
(5.129)
Pentru cazul general al formei directe I, cnd sistemul are M+1
multiplicri pentru zerouri i N multiplicri pentru poli cu coeficieni
diferii de 0 i 1, dispersia surselor de zgomot este
12
) 1 (
2
2
+ + = N M
e
(5.130)
Poriunea din filtru prin care trece zgomotul de rotunjire este
artat n figura 5.16. Ieirea | | n z datorat zgomotului formeaz o parte a
ieirii cuantizate.
Figura 5.16. Poriunea din filtrul recursiv afectat de zgomotul de rotunjire pentru
realizarea n forma direct I.
Pentru figura 5.16 se poate scrie
( )
2
2
1
1
1
1
'
) (
) (
+ +
= =
z a z a
z H
z E
z Z
(5.131)
Evident, aceast funcie de transfer difer de cea a filtrului care
include i zerouri, care este
( )
2
2
1
1
1
1 0
1
+ +
+
=
z a z a
z b b
z H (5.132)
Conform relaiei (5.74), dispersia total de regim permanent a
ieirii datorate zgomotului de rotunjire este
( ) ( )
=
unitate cercul
din polii
zss
z z H z H lui e reziduuril
1 1 ' '
2
2
0
3
(5.133)
297
cu ( ) z H
'
dat de (5.131).
n cazul formei directe I dispersia total de regim permanent a
zgomotului datorat rotunjirii multiplicrilor este
( ) ( )
+ + =
=
+ + =
n
zss
n h N M
dz z z H z H
j
N M
2
2
1 1 ' '
2
2
0
] [ '
12
) 1 (
2
1
12
) 1 (
(5.134)
unde
+
=
N
k
k
k
z a
z H
1
1
1
) ( ' este partea care conine toi polii sistemului.
n continuare, se consider implementarea canonic (forma direct
II) a filtrului descris de (5.126), caz n care erorile de rotunjire pot fi
reprezentate ca surse de zgomot poziionate ca n figura 5.17.
Figura 5.17. Zgomotul de rotunjire al produselor pentru un filtru recursiv implementat n
forma canonic
Se
observ c semnalule de eroare | | | |
=
=
3
2 i
i A
n e n e cu dispersia
6
2
, trece
prin tot filtru, n timp ce | | | |
=
=
1
0 i
i B
n e n e cu dispersia
6
2
este un zgomot
adunat direct la ieire. n acest caz dispersia de regim permanent a ieirii
datorat zgomotului de rotunjire a produselor este suma dispersiilor
zgomotelor determinate de cele dou semnale de eroare ] [n e
A
i ] [n e
B
.
298
( ) ( )
(
(
(
=
unitate cercului
eriorul din polii
zss
z z H z H lui e reziduuril
int
1 1
2
2
0
1
6
(5.135)
cu ( ) z H dat de (5.132).
Pentru cazul general al formei directe II pentru filtrul IIR, cnd
coeficienii acestuia sunt diferii de 0 i 1, dispersia de regim permanent a
zgomotului de ieire este
( ) ( )
+ +
=
=
+ +
=
n
c
zss
M n h N
M dz z z H z H
j
N
12
) 1 ( ] [
12
12
) 1 (
2
1
12
2
2
2
2
1 1
2
2
0
(5.136)
Fr a considera valori numerice pentru coeficieni, numai din
compararea relaiilor (5.134) i (5.136), nu este posibil a decide care
dintre aceste forme de implementare produce un zgomot de ieire mai mic
datorat erorii de cuantizare a produselor.
Exemplul 5. 10.
S se determine dispersia de regim permanent a zgomotului de
ieire, datorat rotunjirii aritmetice, a filtrului cu funcia de sistem
( )
2 2 1
1
1 0
cos 2 1
+
+
=
z r z r
z b b
z H
implementat n
a) form direct I
b) forma direct II
dac r=0,9, 4 = , 1 , 1
0
= b , 3 , 0
1
= b i pasul de cuantizare .
Soluie. a) Din figura 5.15 i 5.16 rezult c dispersia de regim
permanent a zgomotului de ieire este
( ) ( )
( )
2
2 4 2
2 2
1 1
2
2
0
92 , 1
1 2 cos 2
1
1
1
3
' '
3
'
=
+
+
=
=
r r r
r
z z H z H lui e reziduuril
z H lui ai unitate
cercul din polii
zss
cu ( )
2 2 1
cos 2 1
1
'
+
=
z r z r
z H
b) Din figura (5.17) rezult
299
( ) ( )
( )
( )( )
( )( )
2
2 2 4
1 0
2 2
1
2
0
2
1 1
2 2
2
0
07 , 1
1 1 2 cos 2
cos 4 1
1
6
6 6
=
(
+
+ +
+
=
=
=
r r r
r b b r b b
z z H z H lui e reziduuril
z H lui polii
zss
Se observ c forma direct II (canonic) produce un zgomot de
ieire mai mic pentru valorile date ale parametrilor dect forma directa I i
c valorile b
0
i b
1
nu afecteaz dispersia zgomotului de ieire n forma
direct I.
Ecuaiile (5.134) i (5.136) arat c structurile n forma direct I i
II sunt afectate diferit de cuantizarea produselor n implementarea
ecuaiilor cu diferene corespunztoare. n general, alte structuri
echivalente, cum ar fi cele n cascad, n paralel, lattice i formele
transpuse vor avea dispersii totale ale zgomotului la ieire diferite de cele
din structurile n form direct. Nu se poate spune care sistem va avea
dispersia de zgomot la ieire cea mai mic, dac nu se cunosc valorile
coeficienilor.
mbuntirea performanei de zgomot a sistemelor numerice este
posibil folosind sumatoare i acumulatoare pe un numr mai mare de
bii. Aceast soluie presupune ns o complicare semnificativ a realizrii
hard a schemei.
5.6. Oscilaii cu ciclu-limit n sisteme recursive
n seciunile anterioare au fost analizate erorile care apar n
operaiile aritmetice realizate de un filtru digital. Prezena unuia sau a mai
multor cuantizoare n implementarea unui filtru digital, conduce la un
dispozitiv neliniar a crui caracteristic poate fi semnificativ diferit de
cea a filtrului ideal. Efectele neliniare datorate aritmeticii cu precizie
finit, ngreuneaz analiza performanelor unui filtru digital. Pentru a
efectua o analiz a efectului cuantizrii, s-a adoptat o caracterizare
statistic a erorilor de cuantizare, ceea ce a condus n final la un model
liniar pentru filtru.
n sistemele recursive, neliniaritatea datorat efecturii operaiilor
matematice n aritmetic finit poate cauza oscilaii periodice la ieire,
chiar dac secvena de intrare este zero sau o valoare constant, nenul.
Astfel de oscilaii n sistemele recursive sunt numite cicluri limit i pot fi
direct atribuite erorii de rotunjire sau trunchiere la multiplicare. Aceste
300
oscilaii pot fi reduse folosind registre pe mai muli bii. Al doilea tip de
oscilaii numit oscilaii de depire poate aprea cnd intrarea
cuantizorului depete domeniul dinamic. Aceste oscilaii au, de obicei,
amplitudine mare i nu pot fi reduse prin creterea numrului de bii.
5.6.1. Cicluri limit datorate rotunjirii
Fenomenul ciclurilor limit este diferit de comportamentul
zgomotului cauzat de cuantizare. Efectele cuantizrii se identific cu
zgomotul cnd nivelul semnalului este mare i foarte variabil, fcnd
eroarea de cuantizare, la orice moment de timp, aproape independent de
erorile anterioare. Cnd nivelul semnalului este sczut, erorile cauzate de
cuantizare devin corelate. Ciclurile limit sunt periodice, dar nu neaprat
sinusoidale. Ele sunt susceptibile a aprea acolo unde exist reacie n
filtru; filtrele IIR au ntotdeauna mecanisme de reacie n interiorul lor,
deci astfel de oscilaii pot aprea la ieirea lor. Spre deosebire de acestea,
filtrele FIR nu conin mecanisme de reacie i, n consecin, ele nu vor
prezenta oscilaii la ieire. Acesta este un avantaj al filtrelor FIR fa de
cele IIR. Tratarea general a comportrii pe cicluri limit a filtrelor
digitale este dificil, motiv pentru care se vor analiza structurile de
ordinul 1 i 2.
Pentru a ilustra caracteristica unei oscilaii de ciclu limit, se
consider un sistem cu un singur pol, descris de ecuaia liniar cu
diferene
] [ ] 1 [ ] [ n x n ay n y + = (5.137)
n care polul este situat la z=a. Sistemul ideal este prezentat n figura
5.18a.
Figura 5.18. a) Sistemul recursiv ideal cu un singur pol b) Sistemul neliniar real
Sistemul real, care este descris de ecuaia neliniar cu diferene
] [ ]] 1 [ [ ] [ n x n av Q n v + = (5.138)
301
este realizat ca n figura 5.18b.
Se presupune c sistemul real din figura 5.18b este implementat cu
o aritmetic n virgul fix cu patru bii pentru amplitudine i un bit
pentru semn. Cuantizarea care se face dup multiplicare este presupus a
rotunji produsul prin adaos. n Tabelul 5.4 se prezint rspunsul
sistemului real pentru patru poziii diferite ale polului z=a i intrarea
x[n]= [n], unde =15/16, care are reprezentarea binar 0,1111.
Tabel 5.4 Cicluri limit pentru un filtru cu un singur pol
n a=0,1000
= 1/2
a=1,1000
= 1/2
a=0,1100
= 3/4
a=1,1000
= 3/4
0 0,1111 (15/16) 0,1111 (15/16) 0,1011 (11/16) 0,1011 (11/16)
1 0,1000 ( 7/16) 1,1000 (7/16) 0,1000 ( 8/16) 1,1000 (8/16)
2 0,0100 ( 3/16) 0,0100 ( 3/16) 0,0110 ( 6/16) 0,0110 ( 6/16)
3 0,0010 ( 1/16) 1,0010 (1/16) 0,0101 ( 5/16) 1,0101 (5/16)
4 0,0001 ( 1/16) 0,0001 ( 1/16) 0,0100 ( 4/16) 0,0100 ( 4/16)
5 0,0001 ( 1/16) 1,0001 (1/16) 0,0011 ( 3/16) 1,0011 (3/16)
6 0,0001 ( 1/16) 0,0001 ( 1/16) 0,0010 ( 2/16) 0,0010 ( 2/16)
7 0,0001 ( 1/16) 1,0001 (1/16) 0,0010 ( 2/16) 1,0010 (2/16)
8 0,0001 ( 1/16) 0,0001 ( 1/16) 0,0010 ( 2/16) 0,0010 ( 2/16)
n mod ideal, rspunsul sistemului ar trebui s scad exponenial
spre zero ( y[n]= a
n
0 cnd n ). n sistemul real, totui, rspunsul
v[n] atinge o stare stabil periodic la ieire, cu o perioad ce depinde de
valoarea polului. Cnd polul este pozitiv, oscilaiile au loc cu perioada
N
p
= 1, astfel nct ieirea atinge o valoare constant de 1/16 pentru a=1/2
i 1/8 pentru a=3/4. Acest fenomen este numit ciclu limit cu frecven
zero.
Pe de alt parte, cnd polul este negativ, secvena de ieire
oscileaz ntre valori pozitive i negative (1/16 pentru a = 1/2 i 1/8
pentru a = 3/4). Prin urmare, perioada este N
p
= 2. Se obine astfel o
oscilaie de amplitudine constant, a crei pulsaie este egal cu i a
crei amplitudine este 1/16 sau 1/8.
Aceste cicluri-limit apar ca rezultat al efectului de cuantizare n
multiplicri. Cnd secvena de intrare x[n] devine zero, ieirea intr ntr-
un ciclu limit dup un numr de iteraii. Ieirea rmne n acest ciclu
limit pn cnd este aplicat un alt semnal de intrare, suficient de
puternic, pentru a scoate sistemul din ciclu. n mod similar, ciclurile
limit cu intrare zero apar din condiii iniiale nenule. Amplitudinea ieirii
302
pe perioada ciclului limit este inclus ntr-un domeniu de valori care este
numit banda moart a filtrului. Frecvena i amplitudinea ciclului limit
depind de coeficieni, condiii iniiale, metoda de cuantizare i lungimea
cuvntului.
Este interesant de menionat faptul c atunci cnd rspunsul
filtrului cu un pol este n ciclu limit, sistemul neliniar real lucreaz ca un
sistem liniar echivalent, cu un pol la z=1, atunci cnd polul este pozitiv
(a>0), i z = -1, cnd polul este negativ (a<0). Aceasta nseamn
<
>
=
0 ], 1 [
0 ], 1 [
]] 1 [ [
a n v
a n v
n av Q
r
(5.139)
Deoarece produsul av[n-1] este rotunjit, eroarea de cuantizare este
limitat de
b
r
n av v a Q
2
2
1
] 1 [ ]] 1 [ [ (5.140)
unde b este numrul de bii (exclusiv semnul) utilizat n reprezentarea
polului a i a lui v[n]. Prin urmare, relaiile (5.139) i (5.140) conduc la
b
n av n v
2
2
1
] 1 [ ] 1 [
i, deci
a
n v
b
1
2
2
1
] 1 [ (5.141)
Cnd coeficientul a este pozitiv, rspunsul ciclului limit se
numete de curent continuu (are amplitudine i semn constante), iar dac
a este negativ comportamentul ciclului limit are amplitudine constant
dar semn alternant.
Expresia din (5.141) definete zona sau banda moart pentru un
filtru cu un singur pol. De exemplu, cnd b = 4 i |a|=1/2 banda moart
este cuprins n domeniul (-1/16, 1/16) pentru amplitudini, iar pentru
b = 4 i |a|=3/4, banda moart crete la (-1/8, 1/8).
Comportarea ciclului limit n cazul unui filtru cu doi poli este
mult mai complex prin faptul c poate aprea o mai mare varietate de
oscilaii. n acest caz sistemul ideal cu doi poli este descris de ecuaia
liniar cu diferene
] [ ] 2 [ ] 1 [ ] [
2 1
n x n y a n y a n y + + = (5.142)
n timp ce sistemul real este descris de ecuaia neliniar cu diferene
303
] [ ]] 2 [ [ ]] 1 [ [ ] [
2 1
n x n v a Q n v a Q n v
r r
+ + = (5.143)
Cnd coeficienii filtrului satisfac condiia a
1
2
< 4a
2
, polii
sistemului apar la
j
re z
=
2 , 1
, unde a
2
= r
2
i a
1
= 2rcos. Ca i n cazul
filtrului cu un singur pol, cnd sistemul este ntr-un ciclu limit cu intrare
zero [49],
] 2 [ ]] 2 [ [
2
= n v n v a Q
r
, (5.144)
adic sistemul se comport ca un oscilator cu polii complex-conjugai
situai pe cercul unitate (a
2
= r
2
= 1 ). Rotunjirea produsului av[n-2]
implic
b
r
n v a n v a Q
2
2
1
] 2 [ ]] 2 [ [
2 2
(5.145)
Dup substituia lui (5.144) n (5.145), se obine
b
n v a n v
2
2
1
] 2 [ ] 2 [
2
sau, echivalent
2
1
2
2
1
] 2 [
a
n v
b
(5.146)
Expresia din (5.146) definete banda moart a unui filtru de ordin
doi cu poli complex conjugai. Se observ c limitele benzii moarte
depind doar de a
2
. Parametrul a
1
= 2rcos determin doar frecvena
oscilaiilor.
Un alt ciclu limit posibil cu intrarea zero, care este numai amintit
i care apare ca rezultat al rotunjirii multiplicrilor, corespunde unui
sistem echivalent de ordinul doi cu polii la z = 1.
Este interesant de menionat cum ciclurile limit descrise anterior
au rezultat prin rotunjirea produsului dintre coeficienii filtrului i ieirile
precedente v[n -1] i v[n -2]. n locul rotunjirii, se poate alege a trunchia
produsul la b bii, caz n care se pot elimina multe din ciclurile limit, dar
aceast soluie nu este foarte agreat, deoarece trunchierea are ca rezultat
o deplasare a valorii medii a erorii, excepie fcnd cazul cnd se
folosete reprezentarea semn-valoare unde eroarea de trunchiere este
simetric fa de zero.
n realizarea n paralel a diverselor sisteme IIR de ordin nalt cu
seciuni de ordinul doi, fiecare seciune genereaz propriul ciclu limit,
fr interaciune ntre seciunile de filtru de ordin doi. Prin urmare, ieirea
304
este o sum a ciclurilor limit cu intrare zero a seciunilor individuale. n
cazul realizrii n cascad pentru un sistem IIR de ordin nalt, ciclurile
limit sunt mult mai greu de analizat. n particular, cnd prima seciune de
filtru genereaz un ciclu limit cu intrare zero, acesta este filtrat de
seciunile succesive. Dac frecvena ciclului limit este apropiat de
frecvena de rezonan a filtrului urmtor din succesiune, amplitudinea
secvenei va fi mrit de caracteristica de rezonan. n general, trebuie
evitate astfel de situaii.
5.6.2. Cicluri limit datorate depirii
Un tip mult mai sever de cicluri limit poate aprea datorit
depirii aritmetice din interiorul filtrelor care folosesc aritmetica n
complement fa de unu sau n complement fa de doi. Aceste cicluri
limit sunt cunoscute sub numele de oscilaii de depire. O depire la
adunarea a dou sau mai multe numere binare apare atunci cnd suma
depete lungimea disponibil a cuvntului la implementarea digital a
sistemului.
De exemplu, se consider seciunea de filtru de ordin doi
prezentat n figura 5.19, n care adunarea se face n aritmetica
complementului fa de doi.
Figura 5.19. Seciune de filtru de ordinul doi
Ieirea din filtru se poate scrie
]] [ ] 2 [ ] 1 [ [ ] [
2 1
n x n y a n y a g n y + + = (5.147)
unde funcia g[.] reprezint adunarea n complement fa de doi.
Figura 5.20 prezint caracteristica intrare-ieire g[v] a sumatorului
n complement fa de doi.
305
Figura 5.20. Caracteristica funcional pentru adunarea n complement fa de doi a dou
sau mai multe numere
Domeniul de valori al parametrilor (a
1
, a
2
) pentru un filtru stabil
este precizat de triunghiul de stabilitate [63]. Totui, aceste condiii nu
sunt de ajuns pentru a preveni oscilaiile datorate depirii din aritmetica
n complement fa de doi. Condiia necesar i suficient pentru a nu
aprea cicluri limit datorate depirii, este [49]
a a
1 2
1 + < (5.148)
care este o condiie extrem de restrictiv i duce la o constrngere
nerezonabil asupra oricrei seciuni de filtru de ordin doi.
Un remediu efectiv pentru rezolvarea problemei oscilaiilor
provocate de depire este de a modifica caracteristica sumatorului, ca n
figura 5.21, care opereaz cu saturare numeric. Atunci cnd este sesizat
o depire (sau o subdepire), ieirea sumatorului va avea valoarea
maxim de capt de scar 1. Distorsiunea cauzat de aceast neliniaritate
n sumator este de obicei mic deoarece saturaia apare rar. Folosirea unei
astfel de neliniariti nu elimin necesitatea scalrii semnalelor i a
parametrilor sistemului, aa cum va fi descris n paragraful urmtor.
Figura 5.21. Caracteristica funcional pentru adunare cu saturare la 1
306
Ilustrarea oscilaiilor datorate depirii se face pe exemplul
urmtor. Se consider seciunea de filtru de ordin doi caracterizat de
ecuaia (5.143) n care adunarea se face n aritmetica complementului fa
de doi, cu lungimea cuvintelor de 4 bii, incluznd bitul de semn, i se
folosete rotunjirea pentru reprezentrile n complement fa de doi. Se
presupune c a
1
= 3/4 = 0,110 i a
2
= - 3/4 = 1,010 i, de asemenea, c x[n]
rmne zero pentru n 0.
Se consider condiiile iniiale v[-1] = (3/4)
10
= (0,110)
2C
i
v[-2] = (-3/4)
10
= (1,010)
2C
. Eantionul de la ieire la momentul n=0 va fi
v [0] = 0,1100,110+1,0101,010 = 0,100100 + 0,100100.
Dac se rotunjete fiecare produs, rezult
v[0] = 0,101+0,101 = 1,010 = -3/4.
n mod similar se obine
v[1] = 1,011+1,011 = 0,110 = 3/4,
adic, v[n] va continua s oscileze ntre 3/4 i 3/4 pn ce este aplicat un
semnal de intrare care s scoat sistemul din acest ciclu limit. Acesta
este un exemplu de oscilaii de depire. Sistemele de ordin mai mare au o
comportare mai complex.
5.7. Scalarea pentru prevenirea depirii
Saturaia aritmetic descris n paragraful anterior elimin
ciclurile limit datorate depirii pe de o parte, dar, pe de alt parte, duce
la distorsiuni nedorite ale semnalelor, n acest caz nemaifuncionnd
regula conform creia, dac se adun mai multe numere a cror sum este
de modul subunitar, rezultatul este corect, chiar dac apar depiri n
etapele intermediare de calcul. Pentru a limita aceste distorsiuni neliniare
se scaleaz semnalul de intrare i rspunsul la impuls ntre intrare i orice
nod din sistem, astfel nct s nu se depeasc gama dinamic.
Efectul depirii este mult mai sever pentru un filtru recursiv,
dect pentru unul nerecursiv, deoarece erorile sunt filtrate din nou
(datorit reaciei) ceea ce face ca filtrul s devin inutilizabil n scurt
timp. Pentru ambele tipuri de filtre, scalarea este necesar pentru
reducerea amplitudinii semnalelor n anumite limite, evitndu-se
depirea n condiii normale de lucru. Exist mai multe reguli de scalare,
care vor fi prezentate n cele ce urmeaz.
307
5.7.1. Norme de scalare
5.7.1.1. Scalarea dup norma l
1
Se analizeaz toate nodurile n care ar putea aprea depiri i
fiecare nod din reea este constrns s aib o amplitudine mai mic dect
1, pentru a evita depirea. Dac ] [n w
i
reprezint valoarea variabilei
asociat nodului i iar ] [n h
i
este rspunsul la impuls de la nodul de intrare,
cruia i este asociat variabila ] [n x , pn la nodul i, atunci se poate scrie
=
=
o m
i i
m h m n x n w ] [ ] [ ] [ . (5.149)
Considernd c ] [ m n x are valoarea maxim
max
x , rezult
0
max
] [ ] [
m
i i
m h x n w . (5.150)
O condiie suficient ca 1 ] [ < n w
i
este ca
=
<
0
max
] [
1
m
i
m h
x (5.151)
pentru toate nodurile din reea. Mrimea
=
= =
1
0
1
1
] [
m
i i
m h h l se numete
norma
1
l a lui
i
h . Dac
max
x nu satisface ecuaia (5.151), atunci se poate
multiplica ] [n x cu factorul de scalare
<
1
1
1
min
i
i
h
s la intrarea
sistemului, astfel nct
max 1
x s s satisfac (5.151) pentru toate nodurile din
reea, adic
(
<
=0
max 1
] [ max
1
m
i
i
m h
x s (5.152)
Scalnd intrarea pe aceast cale se garanteaz c depirea nu
apare niciodat la nici unul din nodurile de reea. La ieire se
compenseaz scalarea prin nmulirea cu
1
1
s
, astfel nct s nu se
modifice funcia de transfer a filtrului. Relaia (5.152) conduce la o
308
scalare foarte sever, care se mai numete i scalare de sum. n practic
scalarea nu este fcut niciodat aa puternic, pentru c nrutete
raportul semnal-zgomot, fapt ce va fi artat ulterior.
5.7.1.2. Scalarea dup norma l
Dac se dispune de cunotine suplimentare despre intrare, se
poate alege factorul de scalare, s
,
mai mare, astfel nct s se garanteze
lipsa depirii. Dac intrarea este un semnal de band ngust modelat cu
) cos( ] [
0 max
n x n x = , variabilele de noduri vor fi [39]
)] ( cos[ ) ( ] [
0 0 max 0
i i i
H n x H n w + = (5.153)
Depirea este evitat pentru toate semnalele armonice dac
1 ) ( max
max
,
<
x H
i
i
(5.154)
Mrimea ) ( max
i i
H H l
= = se numete norma
l a lui H
i
.
Dac intrarea este scalat prin factorul de scalare
<
i
i
H
s
1
min rezult
) ( max
1
,
max
i
i
H
x s
< (5.155)
5.7.1.3. Scalarea dup norma l
2
O alt abordare posibil este de a scala intrarea astfel nct energia
fiecrei variabile de nod s fie mai mic sau egal cu energia total a
secvenei de intrare. Se poate obine scalarea corespunztoare folosind
inegalitatea Schwartz Buniacovski i teorema lui Parseval [63].
=
=
= =
0
2
0
2
0
2
0
2
2
0
2
] [ ] [
] [ ] [ ] [ ] [ ] [
k k
i
k k
i
k
i i
k x k h
k n x k h k n x k h n w
(5.156)
Pentru a asigura condiia de nedepire a energiei semnalului de
intrare de ctre varialilele de noduri, adic
0
2 2
] [ ] [
n
i
n x n w , unde
309
x
n
E n x =
=0
2
] [ este energia semnalului de intrare, se poate multiplica
secvena ] [n x cu factorul de scalare
2
s , ales astfel nct
=
=
d H
n h
s
i
i
n
i
i
2
0
2
2
2
) (
2
1
max
1
] [ max
1
(5.157)
Mrimea
2 / 1
0
2
2
2
] [ |
.
|
\
|
= =
= n
i i
n h h l se numete norma
2
l a lui
i
h .
5.7.1.4. Scalarea dup norma l
p
Metodele anterioare pot fi generalizaze n sensul normei l
p
.
Norma
p
l a unei transformate Fourier ) ( H este definit ca [39]
d H H l
p
p
p
p
1
) (
2
1
(
= =
(5.158)
Se poate arta c, n general, este ndeplinit inegalitatea [26]
q
i
p
i
H X n w ] [ (5.159)
unde p i q sunt ntregi astfel nct
. 1
1 1
= +
q p
(5.160)
Pentru orice secven ] [n h cu transformata Fourier ) ( H exist
relaia [23]
p
H H
, oricare ar fi .
*
N p
Ca urmare, scalarea
l reduce nivelele de semnal ntr-o msur
mai mare dect alte scalri de tip
p
l . Cele mai folosite scalri sunt
2
l ,
l ,
precum i scalarea de sum. Se poate arta c exist relaia [23]
=
=
0 0
,
2
] [ ) ( max ] [
n
i
n
i
i
i
n h H n h
, (5.161)
adic
. 1 2
l l l
Dintre acestea, cea mai sever este scalarea de sum, care este i
dificil de calculat. Cel mai uor de evaluat analitic este relaia (5.157),
deoarece aceast integral poate fi calculat folosind teorema reziduurilor
a lui Cauchy [1].
310
Deoarece n implementarea filtrelor recursive intervin mai multe
puncte de sumare, ieirea fiecruia trebuie scalat pentru a evita
depirea, deci vor fi mai multe rspunsuri la impuls h
i
[n] i funcii de
sistem corespunztoare, H
i
(z), care fac legtura ntre intrarea x[n] i
semnalele intermediare w
i
[n].
5.7.2. Interaciunea dintre domeniul dinamic i zgomot
Normele de scalare
1 2
, , l l l
reprezint trei moduri de a obine
coeficieni de scalare pentru intrarea unui filtru digital. Prin scalarea
intrrii cu factorul 2 , , 1 , = p s
p
, raportul semnal / zgomot de cuantizare
la ieire scade.
n figura 22 a,b, se prezint un sistem IIR de ordinul doi,
implementat n forma direct I i forma direct II, cu intrarea scalat. n
figura 22 a, factorul de scalare s-a combinat cu coeficienii b
k
, astfel nct
sursa de zgomot este aceeai ca n cazul fr scalare, prezentat n figura
5.15. Deoarece acest zgomot este filtrat din nou de partea de filtru care
conine polii, puterea zgomotului de ieire este aceeai pentru sistemul
nescalat, reprezentat n figura 5.15 i cel scalat, reprezentat n 5.22a.
Pentru sistemul din figura 22a, funcia de sistem este ) (z H s
p
, fa de
) (z H a sistemului cu intrarea nescalat i, corespunztor, ieirea este
] [ ] [ ' n y s n y
p
= , n loc de ] [n y . Deoarece zgomotul este injectat dup
scalare, raportul dintre puterea semnalului i cea a zgomotului n sistemul
scalat este de
2
p
s ori raportul semnal/zgomot pentru sistemul nescalat din
figura 5.15. Cum 1 <
p
s atunci cnd este necesar scalarea, raportul
semnal / zgomot la ieirea filtrului se reduce prin scalare.
Figura 5.22. Scalarea sistemelor de ordinul doi. a) Forma direct I, b) Forma direct II
311
n cazul implementrii n forma direct II din figura 22b factorul
de scalare trebuie determinat astfel nct sa se evite depirea n ambele
noduri ncercuite. Funcia de sistem a filtrului scalat este ) (z H s
p
.
Factorul de scalare 2 , , 1 , = p s
p
, contribuie cu o surs suplimentar de
zgomot la ] [n e
a
a sistemului nescalat reprezentat n figura 5.17. Acest
zgomot este filtrat n acelai mod de sistemul nescalat i de cel scalat. Prin
urmare, puterea semnalului se multiplic cu
2
p
s , iar puterea zgomotului de
ieire este dat de relaia (5.136), cu N nlocuit cu (N+1), astfel nct
raportul semnal/zgomot se reduce i n acest caz, dac se efectueaz
scalarea pentru a evita depirea.
n concluzie, cu ct o regul de scalare conduce la un factor de
scalare mai sczut, se reduce probabilitatea depirii, dar se reduce i
raportul semnal/zgomot de cuantizare. Acest fapt reprezint interaciunea
dintre domeniul dinamic i zgomot. Din acest motiv prezint interes
gsirea unor structuri caracterizate de zgomot de cuantizare minim n
condiii de scalare precizate. Utilizarea unor structuri n form direct de
ordin mare nu conduce la rezultate satisfctoare din acest punct de
vedere, astfel nct sunt preferate structurile n cascad sau n paralel,
realizate cu seciuni de ordinul doi.
n continuare sunt date schemele de scalare pentru structurile n
cascad i n paralel.
5.7.3. Scalarea n realizarea n cascad i n paralel
5.7.3.1. Analiza realizrii n cascad
n figura 5.23 este prezentat un sistem implementat cu K module
de ordinul doi, fiecare din acestea implementat n forma canonic,
conectate n cascad.
Figura 5.23. Scalarea la realizarea n cascad a unui filtru cu K celule de ordinul doi
312
Se noteaz cu F
k
, k=1,...K, funcia de sistem a unui modul de ordinul doi.
2
2
1
1
2
2
1
1 0
1
) (
+ +
+ +
=
z a z a
z b z b b
z F
k k
k k k
k
(5.162)
p
i pi
H l ) ( = ; i=1, 2, 3,,K, p = 1, 2, , reprezint norma dup care s-a
efectuat scalarea, iar ) (
i
H - funcia de transfer de la intrare la nodul
i
w .
2
2
1
1
1
1
1
) (
) (
=
+ +
=
z a z a
z F
z H
i i
i
k
k
i
(5.163)
coeficienii
) 1 ( + i p
pi
l
l
pot fi ncorporai n
i i i
b b b
2 1 0
, , .
innd seama de cele prezentate n paragraful precedent, scalarea
este propriu-zis necesar numai pentru seciunile pentru care normele
p
i pi
H l ) ( = sunt supraunitare. Dac, ns, 1 ) (
p
i
H , rezult c nu
este necesar scalare pentru celula respectiv, ceea ce ar corespunde unui
factor de scalare unitar, fr efect asupra zgomotului de cuantizare.
Totui, dac se scaleaz intrarea ntr-o seciune de ordinul doi cu un factor
supraunitar, care va amplifica semnalul, va crete raportul
semnal/zgomot, prin utilizarea eficient a gamei dinamice a filtrului.
Astfel, scalarea poate fi privit nu numai ca un mod de a evita depirea,
ci i de adaptare a nivelului semnalului la gama dinamic a filtrului.
n cazul unui filtru numeric IIR de ordin mare realizat prin
conectarea n cascad a unor structuri de ordinul doi, puterea zgomotului
la ieire depinde de modul n care polii i zerourile sunt mperecheate
pentru a forma structuri de ordinul doi i de ordinea seciunilor n
cascad. Se poate observa c pentru K seciuni de ordin doi exist K!
posibiliti de a mperechea polii i zerourile i K! posibiliti de a ordona
seciunile de ordinul doi rezultate. Rezult n total (K!)
2
sisteme diferite.
n plus, se poate alege oricare din formele directe I sau II (sau transpusele
lor) pentru implementarea seciunilor de ordinul doi. Chiar i pentru
sisteme de ordin mic problema mperecherii i ordonrii nu este simpl,
deoarece necesit un volum mare de calcule.
Se definete factorul (sau ctigul) de vrf pentru celula k cu
relaia
313
2
1
2
2
1
) (
) ( max
(
d H
H
k
k
k
(5.164)
n ciuda dificultii gsirii unei mperecheri i ordonri optime,
Jackson a artat c o grupare optim minimizeaz factorii de vrf i a
gsit c se pot obine rezultate bune aplicnd urmtoarele reguli simple
[23]:
1. Polul care este cel mai apropiat de cercul de raz unitate din planul
Z, trebuie mperecheat cu zeroul cel mai apropiat de el;
2. Regula 1 se aplic repetat pn ce toi polii i zerourile au fost
mperecheate;
3. Seciunile de ordinul doi rezultate trebuie ordonate n funcie de
apropierea polilor de cercul unitate, fie n ordinea cresctoare, fie
descresctoare a apropierii polilor de cercul unitate.
Regulile de mperechere sunt bazate pe observaia c subsistemele
cu ctig (factor) de vrf foarte mare sunt nedorite pentru c ele pot cauza
depiri i pot amplifica zgomotul de cuantizare. mperechind un pol ce
este apropiat de cercul unitate, cu un zerou adiacent se tinde s se reduc
ctigul de vrf al seciunii.
O motivaie pentru regula 3 este aceea c pentru ca spectrul
zgomotului de ieire s nu aib o alur ascuit, cu un maxim puternic n
apropierea unui pol ce este apropiat de cercul de unitate din planul Z, este
de dorit ca aceti poli s fie la nceputul schemei n cascad. Pe de alt
parte, rspunsul n frecven la ieirea unui anumit nod implic produsul
rspunsurilor n frecven ale subsistemelor care preced nodul. Astfel,
pentru a evita reducerea excesiv a nivelului de semnal n etajele
anterioare ale cascadei ar trebui ca polii ce sunt apropiai de cercul unitate
s fie plasai ultimii n cascad. Se observ c problema ordonrii
seciunilor depinde de o varietate de factori, cum ar fi dispersia total a
zgomotului de ieire i forma spectrului zgomotului de ieire. Jackson a
folosit norme l
p
pentru a cuantifica analiza problemei mperecherii i
ordonrii polilor i zerourilor i a elaborat o serie de reguli empirice
pentru obinerea de rezultate satisfctoare, fr a evalua toate
posibilitile.
De multe ori, pentru obinerea unui zgomot ct mai mic, celulele
se ordoneaz n sens cresctor al factorului de vrf. n figura 5.24 este
prezentat ordonarea seciunilor de ordinul doi n cascad n ordinea
314
cresctoare a selectivitii, astfel nct celula cea mai selectiv s filtreze
zgomotele provenite de la toate filtrele, atenundu-le.
Figura 5. 24. Ordonarea seciunilor de ordinul doi n cascad n ordinea cresctoare a
selectivitii acestora
Urmtorul exemplu ilustreaz punctul de vedere conform cruia
ordonarea n cascad a seciunilor este important n controlarea
zgomotului de rotunjire a produselor la ieirea ntregului sistem.
Exemplul 5.11.
S se determine dispersia zgomotului cauzat de rotunjirea
produselor, la ieirea realizrii n cascad a filtrului cauzal, cu funcia de
sistem
H z H z H z ( ) ( ) ( ) =
1 2
unde
1
2
1
1
4
1
1
1
) ( ;
2
1
1
1
) (
=
z
z H
z
z H
Soluie. Fie h[n], h
1
[n], i h
2
[n] rspunsurile la impuls
corespunztoare funciilor de transfer H(z), H
1
(z) i, respectiv, H
2
(z).
Acestea sunt:
] [
4
1
2
1
2 ] [ ], [
4
1
] [ ], [
2
1
] [
2 1
n u n h n u n h n u n h
n n n n
(
(
|
.
|
\
|
|
.
|
\
|
= |
.
|
\
|
= |
.
|
\
|
=
Cele dou realizri n cascad sunt prezentate n figura 5.25.
n prima realizare n cascad, dispersia zgomotului la ieire este
(
+ =
= 0 0
2
2
2 2 2
1
] [ ] [
n n
e z
n h n h
n a doua realizare n cascad, dispersia este
315
(
+ =
= 0 0
2
1
2 2 2
2
] [ ] [
n n
e z
n h n h
=
=
=
= =
=
0
2
2
0
2
1
15
16
16
1
1
1
] [ ;
3
4
4
1
1
1
] [
n n
n h n h
=
=
=
0
2
83 , 1
16
1
1
1
8
1
1
4
4
1
1
4
] [
n
n h
Figura 5. 25. Realizri n cascad
n consecin,
2 2
2
2 2
1
16 , 3
90 , 2
e z
e z
=
=
iar raportul dispersiilor zgomotului de ieire este 09 , 1
2
1
2
2
=
z
z
.
Prin urmare, puterea zgomotului n a doua realizare n cascad
este cu 9% mai mare dect n primul caz.
316
5.7.3.2. Analiza realizrii n paralel
n figura 5.26 este prezentat un sistem implementat cu K module
de ordinul doi, conectate n paralel.
Figura 5.26. Scalarea la realizarea n paralel a unui filtru cu K celule de ordinul 2
p
i pi
H l ) ( = ; i=1, 2, 3, ,K, p = 1, 2, , reprezint norma dup
care s-a efectuat scalarea.
) (
i
H - funcia de transfer de la intrare ] [n x la nodul
i
w . Funcia
de sistem corespunztoare este
2
2
1
1
1
1
) (
+ +
=
z a z a
z H
i i
i
; i = 1, 2, 3. (5.165)
Analiza efectelor de cuantizare ntr-un filtru de ordin doi poate fi
direct aplicat la filtrele de ordin superior bazate pe realizri n paralel. n
317
acest caz, fiecare seciune de ordinul doi este independent de celelalte
seciuni i, deci, puterea total a zgomotului de cuantizare la ieire este
suma puterii zgomotului de cuantizare a fiecrei seciuni individuale.
Tehnicile de mperechere enunate anterior pot fi aplicate i la formele n
paralel unde se poate arta [23] c puterea de zgomot la ieire este
comparabil cu cele mai bune mperecheri i ordonri la conectarea n
cascad. Forma n cascad rmne totui cea mai folosit pentru
structurile IIR.
Deoarece structurile IIR cu formele directe I i II includ i
sistemele FIR n forma direct ca un caz particular, rezultatele i tehnicile
de analiz considerate mai sus se aplic la sistemele FIR, dac se elimin
toate referirile la polii funciei de sistem i se elimin cile de reacie n
toate grafurile de semnal.
Pentru sistemele FIR cu faz liniar, implementarea se poate face
cu aproximativ jumtate din multiplicrile sistemului FIR general, ceea ce
determin reducerea la jumtate a dispersiei zgomotului la ieire, dac
produsele sunt cuantizate nainte de adunare.
Rezultatele pentru realizrile n cascad de tip IIR sunt aplicabile
i pentru realizrile n cascad de tip FIR, pentru acestea urmrindu-se
numai problema ordonrii seciunilor de ordinul doi.
5.7.4. Analiza erorii de cuantizare n cazul scalrii intrrii
Pentru a obine o imagine mai clar a efectului erorii de
cuantizare, se va considera i efectul scalrii intrrii. Se reia cazul filtrului
cu un singur pol din exemplul 5.7 prezentat n figura 5.12. Se presupune
c secvena de intrare {x[n]} este o secven de zgomot alb, a crei
amplitudine a fost scalat cu norma l
1
pentru a preveni depirea la
adunare. Atunci
0
max
] [ ] [
n
n h x n y
Cum se dorete ca|y[n]| 1, rezult
a
n h
x
n
=
=
1
] [
1
0
max
(5.166)
Dac se presupune x[n] uniform distribuit n domeniul (-x
max
,
x
max
), atunci, dispersia semnalului de intrare este
2
x
= (1- ,a,)
2
/3.
318
Potrivit relaiei (5.125), puterea zgomotului la ieirea filtrului este
2
2
2
1 a
e
z
=
.
Puterea semnalului de la ieirea filtrului este
2
2
0
2 2 2
1 a
a
x
k
k
x y
= =
(5.167)
Raportul dintre puterea semnalului de ieire,
2
y
, i puterea erorii de
cuantizare,
2
z
, este
) 1 ( 2 2
2
2
2
2
2 ) 1 (
+
= =
b
e
x
z
y
a
(5.168)
Aceast expresie pentru raportul semnal/zgomot de la ieirea
filtrului arat preul pltit ca urmare a scalrii intrrii, mai ales cnd polul
este apropiat de cercul unitate.
Prin comparaie, dac intrarea nu este scalat i sumatorul are un
numr suficient de mare de bii pentru a evita depirea, amplitudinea
semnalului este n intervalul (-1, 1). n acest caz, dispersia semnalului de
intrare este
2
x
= 1/3, independent de poziia polului. Atunci
) 1 ( 2
2
2
2
+
=
b
z
y
(5.169)
Diferena dintre rapoartele semnal/zgomot din (5.168) i (5.169)
demonstreaz necesitatea de a utiliza mai muli bii la adunare, fa de
multiplicare. Numrul biilor adiionali depinde de poziia polului i
trebuie crescut odat cu mutarea polului mai aproape de cercul unitate.
n continuare, se consider un filtru cu doi poli care, cu precizie
infinit, este descris de ecuaia liniar cu diferene
] [ ] 2 [ ] 1 [ ] [
2 1
n x n y a n y a n y + + = (5.170)
unde a
1
=2rcos i a
2
= r
2
.
Cnd cele dou produse sunt rotunjite, rezult un sistem care este
descris de ecuaia neliniar cu diferene
] [ ]] 2 [ [ ]] 1 [ [ ] [
2 1
n x n v a Q n v a Q n v
r r
+ + = (5.171)
Sistemul este prezentat n schema bloc din figura 5.27.
Fiind dou multiplicri, se produc dou erori de cuantizare pentru
fiecare ieire.
319
Prin urmare, trebuie s se introduc dou secvene de zgomot e
1
[n] i
e
2
[n], care corespund ieirilor cuantizoarelor
] [ ] 2 [ ]] 1 [ [
] [ ] 1 [ ]] 1 [ [
2 2 2
1 1 1
n e n v a n v a Q
n e n v a n v a Q
r
r
+ =
+ =
(5.172)
Figura 5.27 Filtru cu doi poli cu cuantizoare prin rotunjire a produselor
O diagram bloc pentru modelul corespunztor este ilustrat n
figura 5.28. Se observ c secvenele de eroare e
1
[n] i e
2
[n] pot fi mutate
direct la intrarea filtrului.
Ca i n cazul filtrului de ordinul nti, ieirea filtrului de ordin doi
poate fi separat n dou componente, componenta semnalului dorit i
componenta erorii de cuantizare. Prima poate fi descris de ecuaia cu
diferene
] [ ] 2 [ ] 1 [ ] [
2 1
n x n y a n y a n y + + = (5.173)
n timp ce a doua satisface ecuaia cu diferene
] [ ] [ ] 2 [ ] 1 [ ] [
2 1 2 1
n e n e n z a n z a n z + + + = (5.174)
Figura 5.28 Modelul zgomotului aditiv pentru erorile de cuantizare ale unui filtru cu doi
poli
320
Se presupune c secvenele e
1
[n] i e
2
[n] sunt necorelate.
Rspunsul la impuls al filtrului este [63]
] [ ) 1 sin(
sin
) ( n u n
r
n h
n
+ =
(5.175)
Prin urmare,
=
+
+
=
0
2 4 2
2
2
2 cos 2 1
1
1
1
] [
n
r r r
r
n h
(5.176)
Aplicnd (5.122) se obine dispersia erorii de cuantizare la ieirea
filtrului, n forma [47]
|
|
.
|
\
|
+
+
=
2 cos 2 1
1
1
1
2 4 2
2
2 2
r r r
r
e z
(5.177)
Dac semnalul de intrare x[n] este scalat cu norma l
1
ca n (5.151)
pentru a evita depirea, puterea semnalului de ieire este
=
=
0
2 2 2
] [
n
x y
n h (5.178)
unde puterea semnalului de intrare x[n] este dat de dispersia
2
0
2
] [ 3
1
(
= n
x
n h
(5.179)
n concluzie, raportul semnal/zgomot la ieirea filtrului cu doi poli
este
2
0
) 1 ( 2
2
2
2
2
] [
2
(
= =
=
+
n
b
e
x
z
y
n h
(5.180)
Cu toate c este dificil evaluarea exact a numitorului n (5.180),
este uor s determinm marginile superioar i inferioar ale acestuia. n
particular, |h[n]| este mrginit superior
0
sin
1
] [ n r n h
n
(5.181)
astfel nct
321
sin ) 1 (
1
sin
1
] [
0 0
r
r n h
n
n
n
=
=
=
(5.182)
Marginea inferioar se poate obine dac se observ c
=
=
0 0
] [ ] [ ) (
n n
n j
n h e n h H
(5.183)
Dar,
( )( )
H
re e re e
j j j j
( )
=
1
1 1
(5.184)
La =, care este frecvena de rezonan a filtrului, se obine cea
mai mare valoare a lui |H()|, deci
2 cos 2 1 ) 1 (
1
) ( ] [
2
0 r r r
H n h
n +
=
=
(5.185)
Prin urmare, raportul semnal/zgomot este mrginit superior i
inferior conform relaiei
) 2 cos 2 1 ( ) 1 ( 2 sin ) 1 ( 2
2 2 ) 1 ( 2
2
2
2 2 ) 1 ( 2
r r r r
b
z
y
b
+
+ +
(5.186)
De exemplu, cnd = /2, expresia din (5.186) devine
2 2 ) 1 ( 2
2
2
2 ) 1 ( 2
) 1 ( ) 1 ( 2 ) 1 ( 2 r r r
b
z
y b
+
+ +
(5.187)
Termenul dominant n aceste margini este (1- r)
2
, care poate
reduce serios raportul semnal/zgomot odat cu apropierea polilor de
cercul unitate. Dac = 1r este distana de la pol la cercul unitate,
raportul semnal/zgomot din (5.187) este redus cu
2
. Aceste rezultate
servesc la ntrirea aseriuni anterioare, referitoare la necesitatea utilizrii
mai multor bii la adunare dect la multiplicare, ca un mecanism de
evitare a erorilor rezultate din operaia de scalare.
S-ar putea să vă placă și
- Masini Pentru Sortarea FructelorDocument16 paginiMasini Pentru Sortarea FructelorAlina Alina100% (1)
- Proiectarea Filtrelor DigitaleDocument56 paginiProiectarea Filtrelor DigitaleAlina AlinaÎncă nu există evaluări
- Actiunea Mecanizarii Agriculturii Asupra Mediului - Posibilitati de Reducere A Efectelor Poluante La Executarea Mecanizata A Lucrarilor in AgriculturaDocument5 paginiActiunea Mecanizarii Agriculturii Asupra Mediului - Posibilitati de Reducere A Efectelor Poluante La Executarea Mecanizata A Lucrarilor in AgriculturaAlina AlinaÎncă nu există evaluări
- Actiunea Mecanizarii Agriculturii Asupra Mediului - Posibilitati de Reducere A Efectelor Poluante La Executarea Mecanizata A Lucrarilor in AgriculturaDocument5 paginiActiunea Mecanizarii Agriculturii Asupra Mediului - Posibilitati de Reducere A Efectelor Poluante La Executarea Mecanizata A Lucrarilor in AgriculturaAlina AlinaÎncă nu există evaluări
- VibratiiDocument16 paginiVibratiiAlina AlinaÎncă nu există evaluări
- Utilizarea Computerului Windows 8Document1 paginăUtilizarea Computerului Windows 8Alina AlinaÎncă nu există evaluări
- Carne PrelucrareDocument27 paginiCarne PrelucrareElena MedeleanuÎncă nu există evaluări
- Lucrare de LicentaDocument52 paginiLucrare de LicentaAlina AlinaÎncă nu există evaluări
- Procesul de PanificatieDocument53 paginiProcesul de PanificatieAlina Alina100% (1)
- Raport CERCETARE - Bacanu AlinaDocument9 paginiRaport CERCETARE - Bacanu AlinaAlina AlinaÎncă nu există evaluări
- Combaterea Vibraţiilor SL ZgomotelorDocument20 paginiCombaterea Vibraţiilor SL ZgomotelorAlina AlinaÎncă nu există evaluări
- Determinarea Nivelului de Zgomot in IndustrieDocument11 paginiDeterminarea Nivelului de Zgomot in IndustrieAlina AlinaÎncă nu există evaluări
- Piesa Flansa 6 GauriDocument24 paginiPiesa Flansa 6 GauriAlina Alina100% (1)
- Transportor Cu RacleteDocument24 paginiTransportor Cu RacleteFlavius Dobre100% (2)
- Organe de Masini Cric SimpluDocument21 paginiOrgane de Masini Cric SimpluAlina AlinaÎncă nu există evaluări
- Proiect ST IulianDocument26 paginiProiect ST IulianAlina AlinaÎncă nu există evaluări
- Finisor de TarateDocument28 paginiFinisor de TarateAlina Alina0% (1)
- Proiect ST IulianDocument26 paginiProiect ST IulianAlina AlinaÎncă nu există evaluări
- Controlul Vibratiilor-ManuscrisDocument292 paginiControlul Vibratiilor-ManuscrisLukianhÎncă nu există evaluări
- Cric Simplu Cu Surub RotitorDocument15 paginiCric Simplu Cu Surub RotitorAlina AlinaÎncă nu există evaluări
- Finisor de TarateDocument28 paginiFinisor de TarateAlina Alina0% (1)
- Metoda Pinch Aplicata in Industria ChimicaDocument38 paginiMetoda Pinch Aplicata in Industria ChimicaAlina AlinaÎncă nu există evaluări