S-ar putea să vă placă și
- M13 - Dispozitive de Fixare Pe MUCN - PC - UI - Cls 1PLDocument2 paginiM13 - Dispozitive de Fixare Pe MUCN - PC - UI - Cls 1PLstan mihaela lacramioaraÎncă nu există evaluări
- 1.planificari Anuale 2022Document7 pagini1.planificari Anuale 2022Geta DaniliucÎncă nu există evaluări
- ECONOMIEDocument3 paginiECONOMIEMarieta IordanÎncă nu există evaluări
- Planificare PregătitoareDocument11 paginiPlanificare PregătitoareBeatrice MoigrădeanÎncă nu există evaluări
- Planificare Fizica 10 Module 2022Document3 paginiPlanificare Fizica 10 Module 2022Geta DaniliucÎncă nu există evaluări
- Planificare Ed Antrep 1Document4 paginiPlanificare Ed Antrep 1Aline PellegrinoÎncă nu există evaluări
- Organizarea - Personalului XII EsDocument4 paginiOrganizarea - Personalului XII EsBunea IoanÎncă nu există evaluări
- Organizarea - Personalului XII EsDocument4 paginiOrganizarea - Personalului XII EsBunea IoanÎncă nu există evaluări
- 2017-2018 - Planif 12 - M3Document3 pagini2017-2018 - Planif 12 - M3cristinaÎncă nu există evaluări
- Planificare CalendaristicaDocument3 paginiPlanificare CalendaristicaFerma OvineÎncă nu există evaluări
- 0 Model Planificare Tehnici de Masurare in Domeniu XiDocument5 pagini0 Model Planificare Tehnici de Masurare in Domeniu XiAncuta RisteiuÎncă nu există evaluări
- Planificare Xii T2Document15 paginiPlanificare Xii T2VELICEA NICOLETAÎncă nu există evaluări
- Calitate IxaDocument5 paginiCalitate IxaIlica Dorina UrsanÎncă nu există evaluări
- 4 - Info A 10-A B - C StNatDocument3 pagini4 - Info A 10-A B - C StNatevil_deeaÎncă nu există evaluări
- 12 Seral M III Utilizarea AutoCADului in ConstructiiDocument3 pagini12 Seral M III Utilizarea AutoCADului in ConstructiiramonaiacobroÎncă nu există evaluări
- M6 Sisteme de Actionare ElectricăDocument1 paginăM6 Sisteme de Actionare ElectricăMirela NitipirÎncă nu există evaluări
- Planificare VI Geometrie 2023 OkDocument4 paginiPlanificare VI Geometrie 2023 OkIonela Cristina MatesÎncă nu există evaluări
- Educatie Antreprenoriala - XDocument3 paginiEducatie Antreprenoriala - XMarieta IordanÎncă nu există evaluări
- Unitatea de ÎnvăţământDocument5 paginiUnitatea de ÎnvăţământCătălin Marian PopescuÎncă nu există evaluări
- Ips Repere Metodologice Fizică 2022 2023Document18 paginiIps Repere Metodologice Fizică 2022 2023anca_gykÎncă nu există evaluări
- IX 2 Ore Fizica PlanificareDocument4 paginiIX 2 Ore Fizica PlanificareMarton Izabella MartonÎncă nu există evaluări
- Bazele Contabilității IxDocument4 paginiBazele Contabilității IxAdela CotigaÎncă nu există evaluări
- Planificare Chimia Pietrelor Si A Metalelor Pretioase XI GDocument3 paginiPlanificare Chimia Pietrelor Si A Metalelor Pretioase XI GVartolomeiDumitruÎncă nu există evaluări
- Planificare Fizica Clasa A Ixa FLORINADocument3 paginiPlanificare Fizica Clasa A Ixa FLORINADubles FlorinaÎncă nu există evaluări
- Planificare Vi Geometrie 2022Document3 paginiPlanificare Vi Geometrie 2022Ionela RaducanuÎncă nu există evaluări
- Planificare Xi T2Document14 paginiPlanificare Xi T2VELICEA NICOLETAÎncă nu există evaluări
- cls6 2019 2020 ElenaDocument2 paginicls6 2019 2020 ElenaElena DragomirÎncă nu există evaluări
- Document Microsoft Word NouDocument5 paginiDocument Microsoft Word Nouramona corneaÎncă nu există evaluări
- Fizica Clasa A VII-aDocument3 paginiFizica Clasa A VII-aMelinda DerecskiÎncă nu există evaluări
- Planificare Calendaristica Educatie Antrepr LiceuDocument4 paginiPlanificare Calendaristica Educatie Antrepr LiceuIleanaÎncă nu există evaluări
- Planificare Calendaristica Educatie Antrepr LiceuDocument4 paginiPlanificare Calendaristica Educatie Antrepr LiceuElena StefanescuÎncă nu există evaluări
- M 9 - Metode de Control Al Sculelor - PC - UI - Cls 1PLDocument4 paginiM 9 - Metode de Control Al Sculelor - PC - UI - Cls 1PLstan mihaela lacramioaraÎncă nu există evaluări
- Educatie Antreprenoriala XDocument7 paginiEducatie Antreprenoriala XGrupaÎncă nu există evaluări
- Clasa 11G SportivDocument2 paginiClasa 11G SportivFlorea Maria BiancaÎncă nu există evaluări
- Servicii Hoteliere PlanificareDocument2 paginiServicii Hoteliere PlanificareGabriela SavinÎncă nu există evaluări
- PLANIFICARE 7B, 2019-2020, FizicaDocument6 paginiPLANIFICARE 7B, 2019-2020, FizicaCamelia Mihaela LutacÎncă nu există evaluări
- Planificare M3 - I XG - Calit. Prod Si ServDocument6 paginiPlanificare M3 - I XG - Calit. Prod Si ServAnina LovinÎncă nu există evaluări
- Organizare AnualaDocument4 paginiOrganizare AnualaPircalabu VoicutaÎncă nu există evaluări
- MATEMATICADocument15 paginiMATEMATICAAnca Carmen ScripcaruÎncă nu există evaluări
- Planificare Economie 11 SeralDocument2 paginiPlanificare Economie 11 SeralSCOALA GIMNAZIALA CIUPERCENI TRÎncă nu există evaluări
- Heisu 12 ST - NatDocument11 paginiHeisu 12 ST - NatSorin Aurel RăducanÎncă nu există evaluări
- Planificare Economie - Clasa A XI-aDocument3 paginiPlanificare Economie - Clasa A XI-aGeorge DawnÎncă nu există evaluări
- Planificare - IX Zi DM 2021 - 2022Document3 paginiPlanificare - IX Zi DM 2021 - 2022Veronica DumitruÎncă nu există evaluări
- Planificare LPM IB PLDocument2 paginiPlanificare LPM IB PLSaliu ViorelÎncă nu există evaluări
- Fizica Clasa A VIII-aDocument3 paginiFizica Clasa A VIII-aMelinda DerecskiÎncă nu există evaluări
- Planificare ANUALA - Administrarea FirmeiDocument4 paginiPlanificare ANUALA - Administrarea FirmeiValentin Sabin TarnaveanÎncă nu există evaluări
- Planif Contabilitate Generala XA 2018Document4 paginiPlanif Contabilitate Generala XA 2018Nicolae BraghesiuÎncă nu există evaluări
- Planificare M4 - AutomobileDocument2 paginiPlanificare M4 - AutomobileAndrei Onica100% (2)
- Analiza Economico Financiara XII A LTDocument4 paginiAnaliza Economico Financiara XII A LTJean Cristian AlbuÎncă nu există evaluări
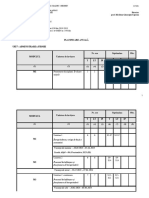
- Planificare Calendaristică: Cunoştinţe Abilităţi (0) (1) (2) (3) (4) (5) (6) (7 10Document3 paginiPlanificare Calendaristică: Cunoştinţe Abilităţi (0) (1) (2) (3) (4) (5) (6) (7 10Anonymous v6eWfyEfAG100% (1)
- 12as, 12Bs-M4-Sisteme de AutomatizareDocument3 pagini12as, 12Bs-M4-Sisteme de AutomatizareDragan LucianÎncă nu există evaluări
- Planificare VII Geometrie 2023 OkDocument3 paginiPlanificare VII Geometrie 2023 OkIonela Cristina MatesÎncă nu există evaluări
- 22-23 planificare-anuala-cls-a-V-a-L2Document3 pagini22-23 planificare-anuala-cls-a-V-a-L2Simona Ioana ObrejaÎncă nu există evaluări
- Planificare VIII Algebra 2023Document3 paginiPlanificare VIII Algebra 2023Paraschiv CristinaÎncă nu există evaluări
- Clasa 11 A C M3Document2 paginiClasa 11 A C M3iuliamariaÎncă nu există evaluări
- AC-XII Planific - Buna - 2022 - 2023Document5 paginiAC-XII Planific - Buna - 2022 - 2023Morosanu DorinaÎncă nu există evaluări
- Contabilitate Generalaa XDocument4 paginiContabilitate Generalaa XJean Cristian AlbuÎncă nu există evaluări
- Aparate Cls X A 2019-2020 - fp1Document2 paginiAparate Cls X A 2019-2020 - fp1Saliu ViorelÎncă nu există evaluări
- PL Analiza Pieţei XiiDocument3 paginiPL Analiza Pieţei XiiAlina CoroamaÎncă nu există evaluări
- Energia Și Puterea ElectricăDocument1 paginăEnergia Și Puterea ElectricăDC1997Încă nu există evaluări
- ForțaDocument1 paginăForțaDC1997Încă nu există evaluări
- ForțaDocument1 paginăForțaDC1997Încă nu există evaluări
- Circuite ElectriceDocument2 paginiCircuite ElectriceDC1997Încă nu există evaluări