S-ar putea să vă placă și
- Metoda Lui Cramer de Rezolvare A Sistemelor LiniareDocument4 paginiMetoda Lui Cramer de Rezolvare A Sistemelor LiniareDaniel Poenaru100% (9)
- Grupul Permutărilor Unei Mulţimi Grupuri SimetriceDocument31 paginiGrupul Permutărilor Unei Mulţimi Grupuri Simetricefr9495Încă nu există evaluări
- Sisteme de Ecuatii Clasa XI Popa Victoria-2Document7 paginiSisteme de Ecuatii Clasa XI Popa Victoria-2zll2007Încă nu există evaluări
- Sisteme de EcuatiiDocument26 paginiSisteme de Ecuatiiskumpi20035829100% (10)
- Preg. BAC - Formule TrigonometriceDocument6 paginiPreg. BAC - Formule TrigonometricegefinnaÎncă nu există evaluări
- Formule de Geometrie Analiticã 1. Coordonate CartezieneDocument7 paginiFormule de Geometrie Analiticã 1. Coordonate CartezieneC Adriana75% (12)
- Logaritmi LectieDocument5 paginiLogaritmi LectieDenise Rancu100% (1)
- PRIMITIVE SI INTEGRALE NEDEFINITE-Teoria La Toate Metodele de Integrare Si Exemple-Cls 12Document12 paginiPRIMITIVE SI INTEGRALE NEDEFINITE-Teoria La Toate Metodele de Integrare Si Exemple-Cls 12Razvan Andrei Munteanu100% (6)
- 2 Lectii de Sinteza - Bacalaureat M2-TeorieDocument6 pagini2 Lectii de Sinteza - Bacalaureat M2-Teorieapi-309576672Încă nu există evaluări
- Integrarea Functiilor Rationale Si RiceDocument8 paginiIntegrarea Functiilor Rationale Si RiceelenadoneaÎncă nu există evaluări
- POLINOAME Teorie BacDocument3 paginiPOLINOAME Teorie Bacaurora_jurubitaÎncă nu există evaluări
- Grupuri FiniteDocument7 paginiGrupuri FiniteMarinela MihailescuÎncă nu există evaluări
- Numere Complexe (Forma Algebrica Si Geometric ADocument6 paginiNumere Complexe (Forma Algebrica Si Geometric AAndrei Vasile100% (2)
- Morfisme Şi Izomorfisme de GrupuriDocument2 paginiMorfisme Şi Izomorfisme de GrupuriSorina Oncel77% (13)
- Asimptotele Functiilor RealeDocument7 paginiAsimptotele Functiilor RealeMihaiTudoseÎncă nu există evaluări
- PermutariDocument11 paginiPermutariPavel100% (4)
- Fundamentele Algebrice Ale Informaticii PDFDocument253 paginiFundamentele Algebrice Ale Informaticii PDFqwer plmÎncă nu există evaluări
- Sisteme de Ecuatii LiniareDocument6 paginiSisteme de Ecuatii Liniarestefanescu_cristia_4Încă nu există evaluări
- Matrice. Rangul Unei Matrice.Document15 paginiMatrice. Rangul Unei Matrice.Thaddeus ReyesÎncă nu există evaluări
- Sisteme de Ecuatii LiniareDocument5 paginiSisteme de Ecuatii LiniareIulia MariaÎncă nu există evaluări
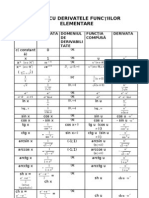
- TABEL CU DERIVATELE FUNCŢIILOR ELEMENTARE-cls 11Document2 paginiTABEL CU DERIVATELE FUNCŢIILOR ELEMENTARE-cls 11Razvan Andrei Munteanu100% (4)
- Fisa de Lucru AsimptoteDocument4 paginiFisa de Lucru AsimptoteTudor Minascurta100% (1)
- Aplicatii AsimptoteDocument4 paginiAplicatii AsimptoteICARocketTÎncă nu există evaluări
- PolinoameDocument53 paginiPolinoameRazvan Andrei Munteanu100% (2)
- Proprietatile DeterminantilorDocument2 paginiProprietatile Determinantilorscribdvictor9825Încă nu există evaluări
- Ecuatii ReciproceDocument5 paginiEcuatii ReciproceNatashaScutelinic100% (1)
- Demonstrarea Unor Inegalități Pe Baza Studiului Funcțiilor Cu Ajutorul DerivatelorDocument4 paginiDemonstrarea Unor Inegalități Pe Baza Studiului Funcțiilor Cu Ajutorul DerivatelorCristina VardianuÎncă nu există evaluări
- Teorie SiruriDocument2 paginiTeorie Sirurimariusikkk1100% (2)
- 3 Determinanti PDFDocument21 pagini3 Determinanti PDFMaria CrinaÎncă nu există evaluări
- Polinoame Teorie Si AplicatiiDocument15 paginiPolinoame Teorie Si AplicatiiBuilescu IonutÎncă nu există evaluări
- IntegraleDocument2 paginiIntegraleNicoleta Manea-Marinescu100% (1)
- Formule IntegraleDocument3 paginiFormule Integralesayuri8910Încă nu există evaluări
- Determinanti Probleme Propuse Cu RezolvareDocument4 paginiDeterminanti Probleme Propuse Cu RezolvareMaria Marinela0% (1)
- Functii Injective Surjective BijectiveDocument8 paginiFunctii Injective Surjective Bijectivemirela_sexygirl100% (3)
- Grupul Claselor de Resturi Modulo NDocument2 paginiGrupul Claselor de Resturi Modulo NMANDRICAN20% (5)
- Relatiile Lui VieteDocument2 paginiRelatiile Lui Vietemiliteanu_laurentiuÎncă nu există evaluări
- Integrala Definită CA Funcție de Limita SuperioarăDocument3 paginiIntegrala Definită CA Funcție de Limita SuperioarăMircea StefanoviciÎncă nu există evaluări
- Determinarea Rangului Unei MatriceDocument15 paginiDeterminarea Rangului Unei Matricematei volanschiÎncă nu există evaluări
- 53-54. Rezolvarea Sistemelor de Ecuaţii Utilizînd Regula Lui Cramer.Document12 pagini53-54. Rezolvarea Sistemelor de Ecuaţii Utilizînd Regula Lui Cramer.Aliona BeșliuÎncă nu există evaluări
- Sistem de Ecuații LiniareDocument33 paginiSistem de Ecuații LiniarezaicaionÎncă nu există evaluări
- Sistem de Ecuații LiniareDocument5 paginiSistem de Ecuații LiniareMaia ZaicaÎncă nu există evaluări
- Sisteme de Ecuatii LiniareDocument19 paginiSisteme de Ecuatii Liniareiulya2802100% (1)
- Sisteme de Teorie AplicatiiDocument5 paginiSisteme de Teorie AplicatiicoranaÎncă nu există evaluări
- Metoda Lui Cramer de Rezolvare A Sistemelor LiniareDocument4 paginiMetoda Lui Cramer de Rezolvare A Sistemelor LiniareDemianMihaelaÎncă nu există evaluări
- Sisteme de Ecuatii LiniareDocument14 paginiSisteme de Ecuatii LiniareDyvonD1Încă nu există evaluări
- Sisteme Liniare Foarte BunDocument1 paginăSisteme Liniare Foarte BunAndrei CosminÎncă nu există evaluări
- Rezolvarea Sistemelor de Ecuatii LiniareDocument3 paginiRezolvarea Sistemelor de Ecuatii LiniareAlexandra State100% (1)
- Metoda SimplexDocument8 paginiMetoda SimplexValentin IacubÎncă nu există evaluări
- Fundamentele Algebrice Ale InformaticiiDocument328 paginiFundamentele Algebrice Ale InformaticiiClaudiu StoicanÎncă nu există evaluări
- Sisteme TeorieDocument1 paginăSisteme Teorieandreyncl6Încă nu există evaluări
- Siste MeDocument45 paginiSiste Mebe HÎncă nu există evaluări
- Sisteme de Ecuatii LiniareDocument8 paginiSisteme de Ecuatii LiniareJustt MeeÎncă nu există evaluări
- Teza de Master 2022.01.04Document35 paginiTeza de Master 2022.01.04Maria ȘișcovaÎncă nu există evaluări
- Rosseaixa12 05 2021Document9 paginiRosseaixa12 05 2021Prof. Loredana TufescuÎncă nu există evaluări
- Sisteme Ec Lin Gsa PDFDocument6 paginiSisteme Ec Lin Gsa PDFAnonymous BNrN48Încă nu există evaluări
- Sisteme de Ecuatii LiniareDocument7 paginiSisteme de Ecuatii LiniarealinaburcaÎncă nu există evaluări
- Rezolvarea Sistemelor de Ecuatii IDocument17 paginiRezolvarea Sistemelor de Ecuatii IVladÎncă nu există evaluări
- Teorie Sisteme - DiscutieDocument1 paginăTeorie Sisteme - Discutieandreyncl6Încă nu există evaluări
- Sisteme de Ecuatii Clasa XI Popa VictoriaDocument6 paginiSisteme de Ecuatii Clasa XI Popa VictoriaIlie Danut-MihaiÎncă nu există evaluări
- Pasi Rezolvare Sisteme Gauss Metoda 2Document13 paginiPasi Rezolvare Sisteme Gauss Metoda 2medeea4alexandraÎncă nu există evaluări
- Suport de Curs IDFR An 2, Limba EnglezăDocument72 paginiSuport de Curs IDFR An 2, Limba EnglezăLarisa Panazan100% (1)
- Proiect Actionari Hidraulice Si PneumaticeDocument22 paginiProiect Actionari Hidraulice Si PneumaticeLarisa PanazanÎncă nu există evaluări
- Atestat LaDocument25 paginiAtestat LaLarisa PanazanÎncă nu există evaluări
- Forta de MuncaDocument10 paginiForta de MuncaLarisa PanazanÎncă nu există evaluări
- Comedia LPDocument2 paginiComedia LPLarisa PanazanÎncă nu există evaluări
- Sisteme Si Tehnologii de FabricatieDocument111 paginiSisteme Si Tehnologii de FabricatieLarisa PanazanÎncă nu există evaluări
- RedresorDocument12 paginiRedresorRotaru MadalinaÎncă nu există evaluări
- LaboratorDocument11 paginiLaboratorSoceanu Mirel MihaitaÎncă nu există evaluări