S-ar putea să vă placă și
- Calculul Matricei InverseDocument4 paginiCalculul Matricei InversechircuÎncă nu există evaluări
- Metoda Eliminarii CompleteDocument6 paginiMetoda Eliminarii Completemiroiu_mÎncă nu există evaluări
- Dreapta Plan RezolvateDocument6 paginiDreapta Plan RezolvateSlavita JarcovÎncă nu există evaluări
- Sem 5Document7 paginiSem 5călin_avanuÎncă nu există evaluări
- E C XII Matematica M Tehnologic 2017 Bar Simulare LRODocument2 paginiE C XII Matematica M Tehnologic 2017 Bar Simulare LROOnno Phris100% (7)
- Probleme de Olimpiada Si Concursuri RezolvateDocument10 paginiProbleme de Olimpiada Si Concursuri Rezolvateiionut29100% (1)
- 1.1.alg.-Studiul Semnelor, DiscutiiDocument2 pagini1.1.alg.-Studiul Semnelor, DiscutiiAndaVacarÎncă nu există evaluări
- 3 AlgebrăDocument26 pagini3 AlgebrăCristian GrÎncă nu există evaluări
- Metode de Rezolvare A IntegralelorDocument14 paginiMetode de Rezolvare A IntegralelorCristina Donescu100% (1)
- Ecuatia de Gradul IIDocument23 paginiEcuatia de Gradul IIpop_sever20003767100% (3)
- 12 An Integrala DefinitaDocument7 pagini12 An Integrala Definitaapi-309576672100% (1)
- DeterminantiDocument4 paginiDeterminantiirina100% (1)
- Grile MateDocument5 paginiGrile MateMadalina RizescuÎncă nu există evaluări
- Metoda Lui CramerDocument3 paginiMetoda Lui CramerViorel ProfesorulÎncă nu există evaluări
- CO Seminarul 6-PLI, GOMORYDocument24 paginiCO Seminarul 6-PLI, GOMORYElena AndronacheÎncă nu există evaluări
- Ecuatii, Numere ComplexeDocument1 paginăEcuatii, Numere ComplexeDinaCebanÎncă nu există evaluări
- Barem Simulare Bacalaureat Matematica Stiintele-Naturii Cluj 24 Aprilie 2013Document1 paginăBarem Simulare Bacalaureat Matematica Stiintele-Naturii Cluj 24 Aprilie 2013Andrei Petru ParvÎncă nu există evaluări
- Metoda Eliminării Gauss-JordanDocument8 paginiMetoda Eliminării Gauss-JordanEmi LpÎncă nu există evaluări
- Teorie Si Aplicatii Rezolvate La Metoda Celor Mai Mici Patrate.Document17 paginiTeorie Si Aplicatii Rezolvate La Metoda Celor Mai Mici Patrate.Iustin Zaharioiu100% (6)
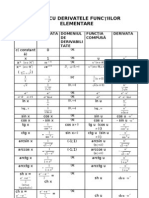
- TABEL CU DERIVATELE FUNCŢIILOR ELEMENTARE-cls 11Document2 paginiTABEL CU DERIVATELE FUNCŢIILOR ELEMENTARE-cls 11Razvan Andrei Munteanu100% (4)
- 3 Determinanti PDFDocument21 pagini3 Determinanti PDFMaria CrinaÎncă nu există evaluări
- Curs Clasa A 11-A Matematica de Postat Pe Portal - de Listat Fata-VersoDocument32 paginiCurs Clasa A 11-A Matematica de Postat Pe Portal - de Listat Fata-VersoUdvescu Liviu Nicolas LoredanaÎncă nu există evaluări
- Determinarea Rangului Unei MatriceDocument15 paginiDeterminarea Rangului Unei Matricematei volanschiÎncă nu există evaluări
- Limite de FunctiiDocument4 paginiLimite de FunctiiАлех ДзержицкийÎncă nu există evaluări
- Relatiile Lui Viete (Polinom de Gradul 3)Document1 paginăRelatiile Lui Viete (Polinom de Gradul 3)Louise BalanÎncă nu există evaluări
- Operații Principale Cu Un Registru de CalculDocument3 paginiOperații Principale Cu Un Registru de CalculAncuța AndreeaÎncă nu există evaluări
- Derivatele Functiilor Compuse PDFDocument2 paginiDerivatele Functiilor Compuse PDFvladalucarDÎncă nu există evaluări
- Teza Clasa A 11 A m2Document1 paginăTeza Clasa A 11 A m2Diana Rugină-Terevlej100% (4)
- Sisteme de Generatori, Baze - Exercitii RezolvateDocument5 paginiSisteme de Generatori, Baze - Exercitii RezolvateLG007100% (1)
- XI.10.Formule Derivate Şi Integrare CR2Document2 paginiXI.10.Formule Derivate Şi Integrare CR2Cotofana Daniela AlexandraÎncă nu există evaluări
- Exercitii Statistica Partea 1 Facultatea Marketing ASEDocument30 paginiExercitii Statistica Partea 1 Facultatea Marketing ASEAndrei NichitaruÎncă nu există evaluări
- Integrale GeneralizateDocument14 paginiIntegrale GeneralizateLauraÎncă nu există evaluări
- Aplic Desf Deutch Martin 11 04 16Document4 paginiAplic Desf Deutch Martin 11 04 16sprinter12Încă nu există evaluări
- Legi de CompozitieDocument3 paginiLegi de CompozitieIamin CojocariÎncă nu există evaluări
- Recapitulare-1-ECUATII DE GRADUL IDocument4 paginiRecapitulare-1-ECUATII DE GRADUL IAlexandru Rusu100% (1)
- Seminar 6 - 1Document7 paginiSeminar 6 - 1Razvan Mihai100% (1)
- Sisteme de EcuaSISTEME DE ECUATII LINIARE. METODA LUI GAUSStii Liniare. Metoda Lui GaussDocument7 paginiSisteme de EcuaSISTEME DE ECUATII LINIARE. METODA LUI GAUSStii Liniare. Metoda Lui GaussZsofia PopÎncă nu există evaluări
- Formule TrigonometriceDocument3 paginiFormule TrigonometricecmvioÎncă nu există evaluări
- Sisteme de Ecuatii LiniareDocument16 paginiSisteme de Ecuatii LiniareValentina DinuÎncă nu există evaluări
- Ecuatia CerculuiDocument5 paginiEcuatia CerculuiMarin BînzariÎncă nu există evaluări
- Frecventa Unui Set de Date StatisticeDocument4 paginiFrecventa Unui Set de Date StatisticegeorgeÎncă nu există evaluări
- ElasticitateaDocument2 paginiElasticitateaBogdan CrîsnicÎncă nu există evaluări
- Rezolvare Cu Metoda Lui Gauss Cu Pivot TotalDocument2 paginiRezolvare Cu Metoda Lui Gauss Cu Pivot TotalConstantin-Razvan TudorÎncă nu există evaluări
- Algoritm SimplexDocument19 paginiAlgoritm SimplexKtala Catalin100% (1)
- Grupul Claselor de Resturi Modulo NDocument2 paginiGrupul Claselor de Resturi Modulo NMANDRICAN20% (5)
- Clase de ResturiDocument4 paginiClase de ResturiAdrianÎncă nu există evaluări
- ATP - Curs14 Recapitulare - Sala - de PostatDocument8 paginiATP - Curs14 Recapitulare - Sala - de PostatUserfromromaniaÎncă nu există evaluări
- Geometrie Analitica PDFDocument4 paginiGeometrie Analitica PDFDana RomanÎncă nu există evaluări
- Metoda Gauss JordanDocument1 paginăMetoda Gauss JordanAna RotarÎncă nu există evaluări
- Fisa de Lucru-Aranjamente - CombinariDocument3 paginiFisa de Lucru-Aranjamente - CombinariStefan RaduÎncă nu există evaluări
- Gauss JordanDocument8 paginiGauss JordanSezen CiorabaiÎncă nu există evaluări
- Algebra - Liniara-Teorie - Si - Aplicatii - Dedu PDFDocument54 paginiAlgebra - Liniara-Teorie - Si - Aplicatii - Dedu PDFStan AnaÎncă nu există evaluări
- Algebra Liniara Teorie Si Aplicatii DeduDocument55 paginiAlgebra Liniara Teorie Si Aplicatii Dedudidddysh100% (1)
- CALCUL MATRICIAL. Metoda de Eliminare Gauss, Factorizarea LU, Metoda Lui Jacobi, Metoda Gauss-Seidel, Metoda de Rezolvare A Sistemelor Liniare in Sensul CMMP. Conditionarea Sistemelor LiniareDocument8 paginiCALCUL MATRICIAL. Metoda de Eliminare Gauss, Factorizarea LU, Metoda Lui Jacobi, Metoda Gauss-Seidel, Metoda de Rezolvare A Sistemelor Liniare in Sensul CMMP. Conditionarea Sistemelor LiniareGmd28Încă nu există evaluări
- Sisteme de Ecuatii Clasa XI Popa Victoria-2Document7 paginiSisteme de Ecuatii Clasa XI Popa Victoria-2zll2007Încă nu există evaluări
- Matlab Lab3Document22 paginiMatlab Lab3Cezara Elena MachedonÎncă nu există evaluări
- SistemedeecuatiiDocument26 paginiSistemedeecuatiiBogdan Ionut100% (1)
- Rezolvare Model Varianta Bac 2014 Mate InfoDocument5 paginiRezolvare Model Varianta Bac 2014 Mate InfoMaria ItuÎncă nu există evaluări
- 0805 Ecuatii Si Sisteme de Ecuatii PDFDocument8 pagini0805 Ecuatii Si Sisteme de Ecuatii PDFgcostea32Încă nu există evaluări
- Sisteme de Ecuatii Clasa XI Popa VictoriaDocument6 paginiSisteme de Ecuatii Clasa XI Popa VictoriaIlie Danut-MihaiÎncă nu există evaluări