S-ar putea să vă placă și
- Matematici EconomiceDocument61 paginiMatematici Economiceariana_cernenchiÎncă nu există evaluări
- Algebra Liniara Teorie Si Aplicatii DeduDocument55 paginiAlgebra Liniara Teorie Si Aplicatii DedudidddyshÎncă nu există evaluări
- Algebra - Liniara-Teorie - Si - Aplicatii - Dedu PDFDocument54 paginiAlgebra - Liniara-Teorie - Si - Aplicatii - Dedu PDFStan AnaÎncă nu există evaluări
- Rom Algagded ExDocument175 paginiRom Algagded ExAnton StefanÎncă nu există evaluări
- MN2-Solutionarea Sistemelor de EcuatiiDocument20 paginiMN2-Solutionarea Sistemelor de EcuatiiСергей СивцовÎncă nu există evaluări
- L2 Transformarea Conforma 3DDocument23 paginiL2 Transformarea Conforma 3DAdrian PopoviciÎncă nu există evaluări
- Sisteme de Ecuatii LiniareDocument7 paginiSisteme de Ecuatii LiniarealinaburcaÎncă nu există evaluări
- Sisteme Ec Lin Gsa PDFDocument6 paginiSisteme Ec Lin Gsa PDFAnonymous BNrN48Încă nu există evaluări
- Sisteme de Ecuatii LiniareDocument14 paginiSisteme de Ecuatii LiniareDyvonD1Încă nu există evaluări
- Calcul NumericDocument26 paginiCalcul Numericgcostea32Încă nu există evaluări
- Sisteme de Ecuatii LiniareDocument1 paginăSisteme de Ecuatii LiniareDaniela DraganÎncă nu există evaluări
- Proiect Geodezie Matematica 2Document24 paginiProiect Geodezie Matematica 2Florina GeorgianaÎncă nu există evaluări
- Modulul 7Document34 paginiModulul 7Burdusa AdyÎncă nu există evaluări
- GausDocument9 paginiGausGABRIELA MIȚĂÎncă nu există evaluări
- Rezolvarea Sistemelor de Ecuatii IDocument17 paginiRezolvarea Sistemelor de Ecuatii IVladÎncă nu există evaluări
- Algoritm SimplexDocument19 paginiAlgoritm SimplexKtala Catalin100% (1)
- EXDocument175 paginiEXpeterclubÎncă nu există evaluări
- MetnumxDocument29 paginiMetnumxRadu TrimbitasÎncă nu există evaluări
- BMS Ro 35Document10 paginiBMS Ro 35Alina BobeicoÎncă nu există evaluări
- 5 - 6 - Curs 5 - 6 - Rezolvarea Sistemelor de Ecuații Liniare (Partea A Doua)Document5 pagini5 - 6 - Curs 5 - 6 - Rezolvarea Sistemelor de Ecuații Liniare (Partea A Doua)alexÎncă nu există evaluări
- Rezolvarea Sistemelor de EcuatiiDocument14 paginiRezolvarea Sistemelor de EcuatiiMaria-Mădălina AlbăstroiuÎncă nu există evaluări
- MN Curs3 Sisteme LiniareDocument4 paginiMN Curs3 Sisteme LiniareMarius BiolaruÎncă nu există evaluări
- Metode Iterative PDFDocument14 paginiMetode Iterative PDFAndra FlorentinaÎncă nu există evaluări
- Exemple Subiecte de Examen La Metode NumericeDocument7 paginiExemple Subiecte de Examen La Metode NumericePanait DragosÎncă nu există evaluări
- Sisteme de Ecuatii LiniareDocument5 paginiSisteme de Ecuatii LiniareIulia MariaÎncă nu există evaluări
- C05 Sisteme de EcuatiiDocument43 paginiC05 Sisteme de EcuatiiAlex LuciuÎncă nu există evaluări
- 03 Baze Plane (NXPowerLite)Document40 pagini03 Baze Plane (NXPowerLite)johnnydoe90Încă nu există evaluări
- 20.danciu Valentin - Rus TiberiuDocument6 pagini20.danciu Valentin - Rus TiberiuCorina Mihaela IvanovÎncă nu există evaluări
- MN Curs3Document13 paginiMN Curs3Ragetescu RageteÎncă nu există evaluări
- Matrice Det SistemDocument1 paginăMatrice Det SistemMariana Gogu100% (1)
- 043 - Matematica Tema 2 Bac M2Document18 pagini043 - Matematica Tema 2 Bac M2Andrei OlarasuÎncă nu există evaluări
- Proiect Did Metoda Lui Gauss Pentu Rezolvarea Sistemelor LiniareDocument4 paginiProiect Did Metoda Lui Gauss Pentu Rezolvarea Sistemelor LiniareNatashaScutelinic100% (2)
- Sisteme de Ecuatii LiniareDocument8 paginiSisteme de Ecuatii LiniareJustt MeeÎncă nu există evaluări
- Statica 12Document71 paginiStatica 12Костя АбабійÎncă nu există evaluări
- Lucrarile 2 3 4Document84 paginiLucrarile 2 3 4Adrian PopoviciÎncă nu există evaluări
- Ev Sum Sist de Ec Matrici Intern 1Document2 paginiEv Sum Sist de Ec Matrici Intern 1TatianaÎncă nu există evaluări
- Matematici PTR EconomistiDocument189 paginiMatematici PTR EconomistiHim47Încă nu există evaluări
- CompunereavectorilorDocument17 paginiCompunereavectorilorzoomy15Încă nu există evaluări
- C R A M e RDocument8 paginiC R A M e RRamona OprisÎncă nu există evaluări
- Sisteme de EcuatiiDocument26 paginiSisteme de EcuatiiNatalia Naumiuc ȚîrdeaÎncă nu există evaluări
- Test M1 DetDocument3 paginiTest M1 DetciolanemilÎncă nu există evaluări
- Curs 7-Orientarea ObsolutaDocument4 paginiCurs 7-Orientarea Obsolutav3d3r4Încă nu există evaluări
- Mac L4 PDFDocument14 paginiMac L4 PDFVlad BabiciÎncă nu există evaluări
- Algebra ALGADDocument8 paginiAlgebra ALGADBogdan MatanieÎncă nu există evaluări
- Algoritmi de Geometrie ComputationalaDocument77 paginiAlgoritmi de Geometrie ComputationalacacatcumuciÎncă nu există evaluări
- Algebra Liniara 1Document40 paginiAlgebra Liniara 1COsmin DumitruÎncă nu există evaluări
- Curs MecanicaDocument144 paginiCurs MecanicadianalaurauÎncă nu există evaluări
- Ui Agagd Ifr I.4Document9 paginiUi Agagd Ifr I.4Mircea-Marius ButoiÎncă nu există evaluări
- Ui Agagd Ifr I.3Document11 paginiUi Agagd Ifr I.3Mircea-Marius ButoiÎncă nu există evaluări
- A.07 Fatada Laterala Stanga - PropunereDocument1 paginăA.07 Fatada Laterala Stanga - PropunereMircea-Marius ButoiÎncă nu există evaluări
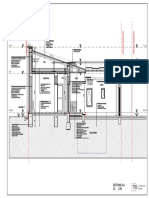
- A.04 Sectiune B-B - PropunereDocument1 paginăA.04 Sectiune B-B - PropunereMircea-Marius ButoiÎncă nu există evaluări
- A.06 Fatada Posterioara - PropunereDocument1 paginăA.06 Fatada Posterioara - PropunereMircea-Marius ButoiÎncă nu există evaluări
- A.05 Fatada Principala - PropunereDocument1 paginăA.05 Fatada Principala - PropunereMircea-Marius ButoiÎncă nu există evaluări
- A.03 Sectiune A-A - PropunereDocument1 paginăA.03 Sectiune A-A - PropunereMircea-Marius ButoiÎncă nu există evaluări