S-ar putea să vă placă și
- Proiect Managementul Riscului Vulcan AlinDocument25 paginiProiect Managementul Riscului Vulcan AlinAlin VulcanÎncă nu există evaluări
- Proiect Muntiu CristianDocument6 paginiProiect Muntiu CristianAlin VulcanÎncă nu există evaluări
- Smi Proiect EfqmDocument45 paginiSmi Proiect EfqmAlin VulcanÎncă nu există evaluări
- SMI Proiect EFQMDocument43 paginiSMI Proiect EFQMAlin VulcanÎncă nu există evaluări
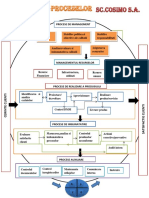
- Harta ProceselorDocument1 paginăHarta ProceselorAlin VulcanÎncă nu există evaluări
- MRi - Concepte ISO31000Document17 paginiMRi - Concepte ISO31000Alin VulcanÎncă nu există evaluări
- 4 Autonomous Mobile Robots - HEI-7-8Document34 pagini4 Autonomous Mobile Robots - HEI-7-8Alin VulcanÎncă nu există evaluări
- 7 3D Bioprinting - HEI-8 - RODocument36 pagini7 3D Bioprinting - HEI-8 - ROAlin VulcanÎncă nu există evaluări
- Spalat OrieDocument1 paginăSpalat OrieAlin VulcanÎncă nu există evaluări
- Proiect Managementul RisculuiDocument26 paginiProiect Managementul RisculuiCobianu Ioana Alina43% (7)
- Proiect Pa3dDocument5 paginiProiect Pa3dAlin VulcanÎncă nu există evaluări
- 8 Virtual Reality - HEI-6Document41 pagini8 Virtual Reality - HEI-6Alin VulcanÎncă nu există evaluări
- Lab 5-IOPT-20-26 04 2020Document12 paginiLab 5-IOPT-20-26 04 2020Alin VulcanÎncă nu există evaluări
- Lab 6-IOPT-28 04 2020Document8 paginiLab 6-IOPT-28 04 2020Alin VulcanÎncă nu există evaluări
- Lab 2-IOPT-31 03 2020Document14 paginiLab 2-IOPT-31 03 2020Alin VulcanÎncă nu există evaluări
- Curs 8 IOPTDocument4 paginiCurs 8 IOPTC. Irina AntoniaÎncă nu există evaluări
- Lab 1-IOPT-23 03 2020Document12 paginiLab 1-IOPT-23 03 2020Alin VulcanÎncă nu există evaluări
- Lab 4-IOPT-15-19 04 2020Document12 paginiLab 4-IOPT-15-19 04 2020Alin VulcanÎncă nu există evaluări
- Lab 3-IOPT-06 04-10 04 2020Document11 paginiLab 3-IOPT-06 04-10 04 2020Alin VulcanÎncă nu există evaluări
- Curs 6 IOPTDocument7 paginiCurs 6 IOPTAlin VulcanÎncă nu există evaluări
- Elemente Teoretice de Baza Privind Modelarea Si Simularea Prin Metoda de Analiza Cu Elemente Finite (Fem)Document19 paginiElemente Teoretice de Baza Privind Modelarea Si Simularea Prin Metoda de Analiza Cu Elemente Finite (Fem)Alin VulcanÎncă nu există evaluări
- 1.4.2 Ideile Fundamentale Ale Metodei Elementelor Finite (MEF)Document3 pagini1.4.2 Ideile Fundamentale Ale Metodei Elementelor Finite (MEF)Alin VulcanÎncă nu există evaluări
- 1.4.3.3 Obţinerea Informaţiilor Nodale Echivalente În Vederea Reconstituirii Domeniului (D)Document6 pagini1.4.3.3 Obţinerea Informaţiilor Nodale Echivalente În Vederea Reconstituirii Domeniului (D)Alin VulcanÎncă nu există evaluări
- Curs 6 IOPTDocument7 paginiCurs 6 IOPTAlin VulcanÎncă nu există evaluări
- 1.4.3.3 Obţinerea Informaţiilor Nodale Echivalente În Vederea Reconstituirii Domeniului (D)Document6 pagini1.4.3.3 Obţinerea Informaţiilor Nodale Echivalente În Vederea Reconstituirii Domeniului (D)Alin VulcanÎncă nu există evaluări
- Curs 8 IOPTDocument4 paginiCurs 8 IOPTC. Irina AntoniaÎncă nu există evaluări
- Curs 8 IOPTDocument4 paginiCurs 8 IOPTC. Irina AntoniaÎncă nu există evaluări
- 1.4.2 Ideile Fundamentale Ale Metodei Elementelor Finite (MEF)Document3 pagini1.4.2 Ideile Fundamentale Ale Metodei Elementelor Finite (MEF)Alin VulcanÎncă nu există evaluări
- Elemente Teoretice de Baza Privind Modelarea Si Simularea Prin Metoda de Analiza Cu Elemente Finite (Fem)Document19 paginiElemente Teoretice de Baza Privind Modelarea Si Simularea Prin Metoda de Analiza Cu Elemente Finite (Fem)Alin VulcanÎncă nu există evaluări