S-ar putea să vă placă și
- RobotiDocument24 paginiRobotiDori GiulescuÎncă nu există evaluări
- Programa CDS RoboStartDocument8 paginiPrograma CDS RoboStartClaudiuÎncă nu există evaluări
- Sisteme de Actionare A Robotilor IndustrialiDocument22 paginiSisteme de Actionare A Robotilor IndustrialigramalaviniaÎncă nu există evaluări
- Arhitectură de Control Reactiv Pentru Roboţi MobiliDocument6 paginiArhitectură de Control Reactiv Pentru Roboţi MobiliIon TomitaÎncă nu există evaluări
- Model Lucrare Licenta RobotiDocument7 paginiModel Lucrare Licenta Robotipop_alyssaÎncă nu există evaluări
- Roch I 2012 Livia Stefan FinalDocument6 paginiRoch I 2012 Livia Stefan Finalbogdan alexandruÎncă nu există evaluări
- Utilizarea Roboţilor Mobili În IndustrieDocument75 paginiUtilizarea Roboţilor Mobili În IndustrieDinulescu Cosmin OvidiuÎncă nu există evaluări
- Referat Roboti IndustrialiDocument8 paginiReferat Roboti IndustrialiVuty VutyÎncă nu există evaluări
- Roboti IndustrialiDocument4 paginiRoboti IndustrialiYoo MariusÎncă nu există evaluări
- E-Modul - Introducere - Interesant Celula Flexibila - Robot o Blucla Inchisa, Robot Din 3 Sisteme, Operational, Cognitiv Si..Document8 paginiE-Modul - Introducere - Interesant Celula Flexibila - Robot o Blucla Inchisa, Robot Din 3 Sisteme, Operational, Cognitiv Si..Madalin SbancaÎncă nu există evaluări
- Referat Roboti IndustrialiDocument8 paginiReferat Roboti IndustrialiVuty VutyÎncă nu există evaluări
- Roboti IndustrialiDocument7 paginiRoboti IndustrialiAlexandru CosminÎncă nu există evaluări
- Proiect Licenta Roboti IndustrialiDocument26 paginiProiect Licenta Roboti IndustrialiGabryel Bogdan100% (1)
- Proiect Atestat Gaman MihaiDocument14 paginiProiect Atestat Gaman MihaiGaman MihaiÎncă nu există evaluări
- Roboti IndustrialiDocument23 paginiRoboti IndustrialiRoberto Burlacu100% (1)
- Clustere de Inovare - Ideea ProiectuluiDocument4 paginiClustere de Inovare - Ideea ProiectuluiCristina MladinÎncă nu există evaluări
- Curs Roboti Mobili Si Microroboti PDFDocument54 paginiCurs Roboti Mobili Si Microroboti PDFRoby NicaÎncă nu există evaluări
- Utilizarea Robotilor Industriali in Automatizarea Proceselor de Fabricatie, de La Cei Care Citesc Piesele, Care Citesc Calitatea, Cei Care Vopsesc, Tor Ce Inseamna Roboti Intro FabricaDocument9 paginiUtilizarea Robotilor Industriali in Automatizarea Proceselor de Fabricatie, de La Cei Care Citesc Piesele, Care Citesc Calitatea, Cei Care Vopsesc, Tor Ce Inseamna Roboti Intro FabricaGabriel SkpÎncă nu există evaluări
- Roboti Mobili Si Microroboti curs-NITULESCU MIRCEA DORIAN IOANDocument169 paginiRoboti Mobili Si Microroboti curs-NITULESCU MIRCEA DORIAN IOANCojan LiviuÎncă nu există evaluări
- Clasificarea Robotilor IndustrialiDocument7 paginiClasificarea Robotilor IndustrialiVuty Vuty100% (2)
- Roboți Mobili AutonomiDocument7 paginiRoboți Mobili AutonomiAdrian Cojocaru100% (1)
- Proiect SsapDocument24 paginiProiect SsapNicu Nicu100% (1)
- Inteligenta Artificiala Si Modele Ale Realitatii Pentru Vehicule AutonomeDocument7 paginiInteligenta Artificiala Si Modele Ale Realitatii Pentru Vehicule AutonomeDamian StefanÎncă nu există evaluări
- Planificare Robotica 2016Document14 paginiPlanificare Robotica 2016Victor TorneaÎncă nu există evaluări
- Referat RobotiDocument7 paginiReferat RobotiVuty VutyÎncă nu există evaluări
- Curs Roboti Mobili Si MicrorobotiDocument54 paginiCurs Roboti Mobili Si MicrorobotiPetcu Norocel100% (1)
- Rezolvare SubiecteDocument4 paginiRezolvare SubiecteMarcu Liviu-IonutÎncă nu există evaluări
- Minirobot Mobil Cu Senzori Pentru Detectare ObstacoleDocument137 paginiMinirobot Mobil Cu Senzori Pentru Detectare ObstacoleRiglea Alin75% (4)
- Proiet SR Robot SCARADocument10 paginiProiet SR Robot SCARAIonică AlexandruÎncă nu există evaluări
- Unitate Robotică Feroviară de Profilare Și Detecție Multi-Senzorială, Bazată Pe Inteligență Artificială Și Fuziune de DateDocument5 paginiUnitate Robotică Feroviară de Profilare Și Detecție Multi-Senzorială, Bazată Pe Inteligență Artificială Și Fuziune de Datepalacsan dezideriuÎncă nu există evaluări
- Multitech Brosura Automatizare WebDocument24 paginiMultitech Brosura Automatizare WebAdrian RÎncă nu există evaluări
- RobotiDocument8 paginiRobotiDan PetreÎncă nu există evaluări
- TFA Lab4Document11 paginiTFA Lab4Petre RareșÎncă nu există evaluări
- Proiect Roboti IndustrialiDocument20 paginiProiect Roboti Industrialicalin_pop100% (1)
- Proiect RoboticaDocument68 paginiProiect RoboticaJolandaÎncă nu există evaluări
- Amenajarea Parcărilor Publice În ChișinăuDocument7 paginiAmenajarea Parcărilor Publice În ChișinăuAnatol BarbalatÎncă nu există evaluări
- Roboti IndustrialiDocument28 paginiRoboti IndustrialiPamfeel1100% (2)
- Prezentare MIV ALTFACTORDocument16 paginiPrezentare MIV ALTFACTORMarius IvanovÎncă nu există evaluări
- Subiecte ExRM 2013 2014Document37 paginiSubiecte ExRM 2013 2014Gheorghita MelinteÎncă nu există evaluări
- ReferatDocument22 paginiReferatRoxana BalutaÎncă nu există evaluări
- Cercetare 2Document41 paginiCercetare 2Daniel SinÎncă nu există evaluări
- Robotic ADocument15 paginiRobotic ASimona Georgiana ValeanuÎncă nu există evaluări
- RobotizareaDocument11 paginiRobotizareaAlexandraMândreaÎncă nu există evaluări
- Roboti MobiliDocument3 paginiRoboti MobiliCătălinaMarinescuÎncă nu există evaluări
- RobotiDocument11 paginiRobotiAlexandraMândrea100% (1)
- Proiect Roboti IndustrialiDocument18 paginiProiect Roboti IndustrialiRobertÎncă nu există evaluări
- Robot MobilDocument9 paginiRobot MobilRoAnDaÎncă nu există evaluări
- Industria Si Tehnologia Mașinilor AutonomeDocument7 paginiIndustria Si Tehnologia Mașinilor AutonomeMinjina AdrianÎncă nu există evaluări
- XamarinDocument63 paginiXamarinCojucovschi IonÎncă nu există evaluări
- Manual Teoretic de Robotică Și MecatronicăDocument46 paginiManual Teoretic de Robotică Și MecatronicăSimascu Ludmila100% (2)
- Raport Practica-Slavoaca Florica AnaDocument25 paginiRaport Practica-Slavoaca Florica AnaFlorica Ana SlavoacaÎncă nu există evaluări
- Licenta - Cu Raspberry KIT Experimental Pentru Modelarea Funcţiilor Autovehiculului AutonomDocument68 paginiLicenta - Cu Raspberry KIT Experimental Pentru Modelarea Funcţiilor Autovehiculului AutonomAlin ArgeseanuÎncă nu există evaluări
- SMI Proiect EFQMDocument43 paginiSMI Proiect EFQMAlin VulcanÎncă nu există evaluări
- Proiect Managementul Riscului Vulcan AlinDocument25 paginiProiect Managementul Riscului Vulcan AlinAlin VulcanÎncă nu există evaluări
- Smi Proiect EfqmDocument45 paginiSmi Proiect EfqmAlin VulcanÎncă nu există evaluări
- 8 Virtual Reality - HEI-6Document41 pagini8 Virtual Reality - HEI-6Alin VulcanÎncă nu există evaluări
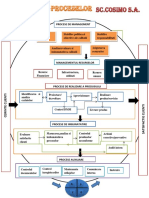
- Harta ProceselorDocument1 paginăHarta ProceselorAlin VulcanÎncă nu există evaluări
- Spalat OrieDocument1 paginăSpalat OrieAlin VulcanÎncă nu există evaluări
- 7 3D Bioprinting - HEI-8 - RODocument36 pagini7 3D Bioprinting - HEI-8 - ROAlin VulcanÎncă nu există evaluări
- MRi - Concepte ISO31000Document17 paginiMRi - Concepte ISO31000Alin VulcanÎncă nu există evaluări
- Lab 6-IOPT-28 04 2020Document8 paginiLab 6-IOPT-28 04 2020Alin VulcanÎncă nu există evaluări
- Proiect Muntiu CristianDocument6 paginiProiect Muntiu CristianAlin VulcanÎncă nu există evaluări
- Lab 5-IOPT-20-26 04 2020Document12 paginiLab 5-IOPT-20-26 04 2020Alin VulcanÎncă nu există evaluări
- Elemente Teoretice de Baza Privind Modelarea Si Simularea Prin Metoda de Analiza Cu Elemente Finite (Fem)Document19 paginiElemente Teoretice de Baza Privind Modelarea Si Simularea Prin Metoda de Analiza Cu Elemente Finite (Fem)Alin VulcanÎncă nu există evaluări
- Lab 4-IOPT-15-19 04 2020Document12 paginiLab 4-IOPT-15-19 04 2020Alin VulcanÎncă nu există evaluări
- Proiect Pa3dDocument5 paginiProiect Pa3dAlin VulcanÎncă nu există evaluări
- Proiect Managementul RisculuiDocument26 paginiProiect Managementul RisculuiCobianu Ioana Alina43% (7)
- Lab 1-IOPT-23 03 2020Document12 paginiLab 1-IOPT-23 03 2020Alin VulcanÎncă nu există evaluări
- Lab 3-IOPT-06 04-10 04 2020Document11 paginiLab 3-IOPT-06 04-10 04 2020Alin VulcanÎncă nu există evaluări
- 1.4.3.3 Obţinerea Informaţiilor Nodale Echivalente În Vederea Reconstituirii Domeniului (D)Document6 pagini1.4.3.3 Obţinerea Informaţiilor Nodale Echivalente În Vederea Reconstituirii Domeniului (D)Alin VulcanÎncă nu există evaluări
- Curs 8 IOPTDocument4 paginiCurs 8 IOPTC. Irina AntoniaÎncă nu există evaluări
- Curs 6 IOPTDocument7 paginiCurs 6 IOPTAlin VulcanÎncă nu există evaluări
- Curs 8 IOPTDocument4 paginiCurs 8 IOPTC. Irina AntoniaÎncă nu există evaluări
- Curs 8 IOPTDocument4 paginiCurs 8 IOPTC. Irina AntoniaÎncă nu există evaluări
- 1.4.2 Ideile Fundamentale Ale Metodei Elementelor Finite (MEF)Document3 pagini1.4.2 Ideile Fundamentale Ale Metodei Elementelor Finite (MEF)Alin VulcanÎncă nu există evaluări
- Lab 2-IOPT-31 03 2020Document14 paginiLab 2-IOPT-31 03 2020Alin VulcanÎncă nu există evaluări
- 1.4.5.4 Sistemul de AxeDocument3 pagini1.4.5.4 Sistemul de AxeAlin VulcanÎncă nu există evaluări
- 1.4.3.3 Obţinerea Informaţiilor Nodale Echivalente În Vederea Reconstituirii Domeniului (D)Document6 pagini1.4.3.3 Obţinerea Informaţiilor Nodale Echivalente În Vederea Reconstituirii Domeniului (D)Alin VulcanÎncă nu există evaluări
- 1.4.2 Ideile Fundamentale Ale Metodei Elementelor Finite (MEF)Document3 pagini1.4.2 Ideile Fundamentale Ale Metodei Elementelor Finite (MEF)Alin VulcanÎncă nu există evaluări
- Elemente Teoretice de Baza Privind Modelarea Si Simularea Prin Metoda de Analiza Cu Elemente Finite (Fem)Document19 paginiElemente Teoretice de Baza Privind Modelarea Si Simularea Prin Metoda de Analiza Cu Elemente Finite (Fem)Alin VulcanÎncă nu există evaluări
- Curs 6 IOPTDocument7 paginiCurs 6 IOPTAlin VulcanÎncă nu există evaluări