S-ar putea să vă placă și
- Masini Unelte Si Roboti IndustrialiDocument68 paginiMasini Unelte Si Roboti Industrialiandreeaoana45100% (1)
- Roboti Industriali MODELE GEOMETRICE, CINEMATICE SI DINAMICEDocument19 paginiRoboti Industriali MODELE GEOMETRICE, CINEMATICE SI DINAMICEAlexandru ArcireÎncă nu există evaluări
- Roboti IndustrialiDocument61 paginiRoboti IndustrialiruoanaÎncă nu există evaluări
- Roboti ParaleliDocument16 paginiRoboti Paraleliraku2121Încă nu există evaluări
- Roboti Industriali Incercare Si Receptie - Dobrescu-PascuDocument312 paginiRoboti Industriali Incercare Si Receptie - Dobrescu-PascuStoian ValentinÎncă nu există evaluări
- Actionari Electrice in MecatronicaDocument10 paginiActionari Electrice in MecatronicaJhon Dobre FuckÎncă nu există evaluări
- Curs Roboti 2 DLMDocument32 paginiCurs Roboti 2 DLMRiciu RoxanaÎncă nu există evaluări
- Actionarea Hidraulica A Robotilor IndustrialiDocument24 paginiActionarea Hidraulica A Robotilor IndustrialiCiprian FratilaÎncă nu există evaluări
- Acţionari Electrice in MecatronicaDocument22 paginiAcţionari Electrice in MecatronicaSebseb44Încă nu există evaluări
- Modelarea-Masinilor-Electrice 2020Document204 paginiModelarea-Masinilor-Electrice 2020RadoniÎncă nu există evaluări
- Curs 2Document17 paginiCurs 2Mihai TRiscaÎncă nu există evaluări
- Modelarea Si Simularea Sistemelor Mobile BiomorfeDocument18 paginiModelarea Si Simularea Sistemelor Mobile BiomorfeBusioc Alina Ioana100% (1)
- ProiectDocument29 paginiProiectTerrance TorresÎncă nu există evaluări
- Analiza Si Programarea Unui Robot CartezianDocument13 paginiAnaliza Si Programarea Unui Robot CartezianIrimies BogdanÎncă nu există evaluări
- Universitatea POLITEHNICA Din BucureștiDocument28 paginiUniversitatea POLITEHNICA Din BucureștiAlexandru IonescuÎncă nu există evaluări
- Sisteme ManipulatoareDocument6 paginiSisteme ManipulatoareCatalin MihalceaÎncă nu există evaluări
- Cap 4 Modelarea Si Simularea Sistemelor Electromecanice Cu Ajutorul SoftDocument31 paginiCap 4 Modelarea Si Simularea Sistemelor Electromecanice Cu Ajutorul SoftCornel CerneiÎncă nu există evaluări
- Test - M3 - SEHP - EXAMEN DIFERENTE - SISTEME ELECTRO HIDROPNEUMATICEDocument3 paginiTest - M3 - SEHP - EXAMEN DIFERENTE - SISTEME ELECTRO HIDROPNEUMATICEAnonymous 9KFs8NÎncă nu există evaluări
- Roboti ParaleliDocument13 paginiRoboti Paraleliezitenta100% (1)
- Sisteme de Actionare Ale Robotilor IndustrialiDocument20 paginiSisteme de Actionare Ale Robotilor IndustrialiPodoreanu Iustin100% (1)
- Modelarea Structurii Mecanice A Unui Sistem MecatronicDocument15 paginiModelarea Structurii Mecanice A Unui Sistem MecatronicRazvan BroÎncă nu există evaluări
- CuplajeDocument31 paginiCuplajeKarina SteinÎncă nu există evaluări
- RoboticaDocument12 paginiRoboticaMariusbv0% (1)
- Masini Unelte II - Curs PDFDocument25 paginiMasini Unelte II - Curs PDFSergiu IvanÎncă nu există evaluări
- Sisteme de Actionare II: Prof. Dr. Ing. Valer DOLGADocument279 paginiSisteme de Actionare II: Prof. Dr. Ing. Valer DOLGAGrec CristianÎncă nu există evaluări
- Curs Sai UPBDocument11 paginiCurs Sai UPBRaducanu GabrielÎncă nu există evaluări
- AngrenajeDocument5 paginiAngrenajeNicoleta MelinteÎncă nu există evaluări
- Senzori Si TraductoareDocument8 paginiSenzori Si TraductoareIonica IonÎncă nu există evaluări
- Structuri Mecanice Utilizate În Construcţia Roboţilor IndustrialiDocument11 paginiStructuri Mecanice Utilizate În Construcţia Roboţilor IndustrialiSaliu Viorel100% (1)
- Sisteme de Automatizare SraDocument79 paginiSisteme de Automatizare Srapatricia_rovinariÎncă nu există evaluări
- Senzori Și Traductoare Pneumatice Și HidrauliceDocument10 paginiSenzori Și Traductoare Pneumatice Și HidrauliceCristi FerikÎncă nu există evaluări
- PracticaDocument13 paginiPracticaRaluca Birsan100% (1)
- Caracteristicile Motoarelor de Curent ContinuuDocument18 paginiCaracteristicile Motoarelor de Curent ContinuuPopa Ionut-CristianÎncă nu există evaluări
- Utilizarea Robotiilor Industriali in Operatii de PaletizareDocument5 paginiUtilizarea Robotiilor Industriali in Operatii de PaletizarePetrisor Ionel0% (1)
- Asamblari Prin Sudare ElectricaDocument7 paginiAsamblari Prin Sudare ElectricaPresedinte1990Încă nu există evaluări
- ActuatoriDocument6 paginiActuatoriMiorita_13Încă nu există evaluări
- Auxiliar Curricular Masini CNCDocument24 paginiAuxiliar Curricular Masini CNCAndrei RicleaÎncă nu există evaluări
- Planificare m1 Xi Sisteme de ActionareDocument3 paginiPlanificare m1 Xi Sisteme de ActionareVasilache Damian100% (1)
- Capitolele I-IV FINAL PDFDocument91 paginiCapitolele I-IV FINAL PDFLethal11Încă nu există evaluări
- Proiect Didactic IAC 2014Document11 paginiProiect Didactic IAC 2014Vali PirvuÎncă nu există evaluări
- Sisteme Dinamice - Analiza Vibro-AcusticăDocument171 paginiSisteme Dinamice - Analiza Vibro-AcusticăOldoxÎncă nu există evaluări
- Cap 8 - Roboti IndustrialiDocument8 paginiCap 8 - Roboti Industrialiclenutzu88% (8)
- Instalatii HidropneumaticeDocument57 paginiInstalatii Hidropneumaticeandrei munteanÎncă nu există evaluări
- Sisteme de Actionare Ale Robotilor IndustrialiDocument20 paginiSisteme de Actionare Ale Robotilor IndustrialiPodoreanu Iustin67% (3)
- Sisteme de Actionare Electrica. Telehoi2Document19 paginiSisteme de Actionare Electrica. Telehoi2Marian PavelÎncă nu există evaluări
- Cap 11 - Aplicatii RIDocument13 paginiCap 11 - Aplicatii RIclenutzu100% (1)
- Lucrare de Laborator - TM260.04 - Stand Stick Slip PDFDocument5 paginiLucrare de Laborator - TM260.04 - Stand Stick Slip PDFChirita CristianÎncă nu există evaluări
- Montarea, Intretinerea Si Detectarea Defectelor Instalatiilor PneumaticeDocument4 paginiMontarea, Intretinerea Si Detectarea Defectelor Instalatiilor PneumaticeBogdanÎncă nu există evaluări
- Cap.2 Roboti Industriali - 2Document25 paginiCap.2 Roboti Industriali - 2Carmen GrigorieÎncă nu există evaluări
- Sistem Pneumatic Pentru Actionarea A Doi Cilindri1Document34 paginiSistem Pneumatic Pentru Actionarea A Doi Cilindri1Empos ComÎncă nu există evaluări
- Sisteme Mecatronice. Comanda-Programare. Curs PDFDocument23 paginiSisteme Mecatronice. Comanda-Programare. Curs PDFDragos Simona100% (2)
- Actionari Hidraulice in MecatronicaDocument43 paginiActionari Hidraulice in MecatronicaFrandes Tudor100% (1)
- Roboti IndustrialiDocument7 paginiRoboti IndustrialiNae GeorgeÎncă nu există evaluări
- Roboti IndustrialiDocument4 paginiRoboti IndustrialiYoo MariusÎncă nu există evaluări
- Proiect Atestat Gaman MihaiDocument14 paginiProiect Atestat Gaman MihaiGaman MihaiÎncă nu există evaluări
- Roboti IndustrialiDocument11 paginiRoboti Industrialiandreeaoana45Încă nu există evaluări
- Referat MCDDocument6 paginiReferat MCDAlexandru Claudiu PaladeÎncă nu există evaluări
- Proiect Roboti Industriali CompressDocument24 paginiProiect Roboti Industriali CompressThe Classic WolfÎncă nu există evaluări
- Roboti Industriali PrezentareDocument14 paginiRoboti Industriali PrezentareBignaturalÎncă nu există evaluări
- RobotiDocument8 paginiRobotiDan PetreÎncă nu există evaluări
- Instructiuni Proprii Pentru Vopsitor AutoDocument22 paginiInstructiuni Proprii Pentru Vopsitor AutoMr Gonzalez100% (1)
- Plan Ingrijire IraDocument81 paginiPlan Ingrijire IragramalaviniaÎncă nu există evaluări
- Funar Tema 1-2Document52 paginiFunar Tema 1-2gramalavinia100% (2)
- Tema 5-6Document14 paginiTema 5-6gramalaviniaÎncă nu există evaluări
- Masina de GauritDocument31 paginiMasina de GauritgramalaviniaÎncă nu există evaluări
- Instructiuni Proprii Pentru Vopsitor AutoDocument22 paginiInstructiuni Proprii Pentru Vopsitor AutoMr Gonzalez100% (1)
- 1 Suport CursDocument34 pagini1 Suport CursTalos_the_OneÎncă nu există evaluări
- FUNAR Tema 3-4Document14 paginiFUNAR Tema 3-4Mr GonzalezÎncă nu există evaluări
- Laborator StrunjireDocument15 paginiLaborator StrunjireSPaul7Încă nu există evaluări
- Laborator StrunjireDocument15 paginiLaborator StrunjireSPaul7Încă nu există evaluări
- Plan Prevenire ProtectieDocument12 paginiPlan Prevenire ProtectiegramalaviniaÎncă nu există evaluări
- Laborator StrunjireDocument15 paginiLaborator StrunjireSPaul7Încă nu există evaluări
- Prelucrarea MaterialelorDocument7 paginiPrelucrarea MaterialelorgramalaviniaÎncă nu există evaluări
- BECNDocument20 paginiBECNgramalaviniaÎncă nu există evaluări
- Boala LobsteinDocument14 paginiBoala LobsteingramalaviniaÎncă nu există evaluări
- Procedura de ControlDocument13 paginiProcedura de ControlgramalaviniaÎncă nu există evaluări
- Prelucrarea Prin FrezareDocument8 paginiPrelucrarea Prin Frezaregramalavinia0% (1)
- 1PM - L - Prelucrarea Prin Strunjire PDFDocument10 pagini1PM - L - Prelucrarea Prin Strunjire PDFCristina NicoletaÎncă nu există evaluări
- Cauza Efect IshikawaDocument4 paginiCauza Efect IshikawagramalaviniaÎncă nu există evaluări
- BECNDocument20 paginiBECNgramalaviniaÎncă nu există evaluări
- Procedura de AprovizionareDocument20 paginiProcedura de Aprovizionaregramalavinia100% (1)
- Managementul ProiectelorDocument1 paginăManagementul ProiectelorgramalaviniaÎncă nu există evaluări
- StrunjireDocument8 paginiStrunjiregramalaviniaÎncă nu există evaluări
- Managementul ProiectelorDocument14 paginiManagementul ProiectelorgramalaviniaÎncă nu există evaluări
- Colegiul TehnicDocument14 paginiColegiul TehnicgramalaviniaÎncă nu există evaluări
- 1PM - L - Prelucrarea Prin Strunjire PDFDocument10 pagini1PM - L - Prelucrarea Prin Strunjire PDFCristina NicoletaÎncă nu există evaluări
- Managementul ProiectelorDocument14 paginiManagementul ProiectelorgramalaviniaÎncă nu există evaluări
- Analiza Mediului ConcurentialDocument8 paginiAnaliza Mediului ConcurentialIoana Lavinia Tintaru100% (1)
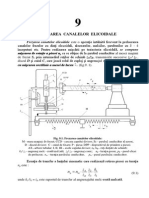
- 9PM L Frezare Canale ElicoidaleDocument2 pagini9PM L Frezare Canale Elicoidalebpatru18Încă nu există evaluări
- MC Kinsey ProiectDocument16 paginiMC Kinsey ProiectgramalaviniaÎncă nu există evaluări