Documente Academic
Documente Profesional
Documente Cultură
Metode de Trasare În Plan A Punctelor Construcţiilor
Încărcat de
Alexandru TazzyTitlu original
Drepturi de autor
Formate disponibile
Partajați acest document
Partajați sau inserați document
Vi se pare util acest document?
Este necorespunzător acest conținut?
Raportați acest documentDrepturi de autor:
Formate disponibile
Metode de Trasare În Plan A Punctelor Construcţiilor
Încărcat de
Alexandru TazzyDrepturi de autor:
Formate disponibile
4.
METODE DE TRASARE N PLAN A
PUNCTELOR CONSTRUCIILOR
Axele i punctele caracteristice ale construciilor se traseaz pe teren prin diferite metode.
Alegerea metodei de trasare se face n funcie de urmtorii factori: condiiile de msurare, gradul de
accidentare al terenului, obstacole ce mpiedic vizele (msurarea peste ape, n subteran etc.), natura
obiectului de trasat (dimensiune i form n plan), precizia cerut la trasare, modul de realizare al reelei de
trasare, aparatura avut la dispoziie.
n funcie de condiiile de mai sus, se poate utiliza una din urmtoarele metode: metoda
coordonatelor polare, metoda coordonatelor rectangulare, metoda interseciei unghiulare nainte,
metoda interseciei liniare, metoda drumuirii poligonometrice, metoda interseciei napoi.
4.1. METODA COORDONATELOR POLARE
Metoda se recomand n situaiile cnd lucrrile se execut n zone n care sunt posibile att
msurtorile unghiulare ct i cele liniare, iar baza de trasare este alctuit dintr-o drumuire
poligonometric sau reea topografic de construcii.
Trasarea pe teren a punctului C se face prin aplicarea, din punctul A al reelei de trasare, a
unghiului orizontal din proiect (unghi polar), fa de latura reelei (direcie de referin) i a
distanei D din proiect (raz vectoare) (figura 4.1).
Valoarea elementelor topografice ce urmeaz a fi trasate ( , D) se determin n faza de
pregtire topografic cu relaiile generale:
AB
AB
AB
AC
AC
AC
X
Y
tg
X
Y
tg
= ; 4.1
AB AC
= 4.2
AC
AC
AC
AC
AC AC
X Y
Y X D
cos sin
2 2
=
= + = 4.3
unde
A C AC
X X X =
A B AB A C AC A B AB
Y Y Y Y Y Y X X X = = = ; ;
Fig. 4.1 Metoda coordonatelor polare
Coordonatele punctelor A i B sunt cunoscute (puncte ale reelei de trasare) iar coordonatele
punctului C sunt indicate n proiect.
Trasarea punctului C se efectueaz astfel:
se staioneaz cu teodolitul n punctul A i fa de direcia de referin AB se traseaz unghiul
(procedeul de trasare, stabilit n faza de proiectare topografo-inginereasc, se alege n concordan cu
precizia cerut de trasare).
pe direcia astfel obinut se va aplica distana D, la captul ei materializndu-se punctul de trasat.
Fig. 4.2 Controlul trasrii
Controlul trasrii se poate efectua:
prin trasarea punctului construciei i din alt punct al reelei de sprijin (de exemplu: trasarea
punctului C din punctele reelei de sprijin A i B - figura 4.2);
trasarea punctului C prin alt metod de trasare;
compararea distanelor i unghiurilor dintre punctele trasate, obinute prin msurarea pe
teren cu cele indicate n proiect.
Precizia metodei
Dac nu se ine seama de influena erorii punctelor reelei de trasare i a erorii de fixare din
figur se obine:
2 2
t l c + = 4.4
n care c abaterea poziiei punctului C provocat de abaterea de trasare a distanei D i de
abaterea de trasare a unghiului polar :
Fig. 4.3 Principiul calculului preciziei
l abaterea longitudinal (poate fi similar cu abaterea de trasare a distanei D);
t abaterea transversal reprezentnd echivalentul liniar al abaterii de trasare a unghiului polar .
innd seama de cele de mai sus, relaia (5.4) poate fi scris i sub forma:
2 2 2
sin + = D D c 4.5
Trecnd la abaterile standard i innd seama i de erorile de poziie a punctelor de sprijin i a celor de
fixare, vom avea:
2
2
2 2
2
f D s c
D
+ + = 4.6
n care:
s
abaterea standard de poziie a punctelor de sprijin;
D
abaterea standard de trasare a distanei;
abaterea standard de trasare a unghiului orizontal;
f
abaterea standard de fixare a punctului trasat.
4.2. METODA COORDONATELOR RECTANGULARE
Aceast metod se aplic n cazul punctelor construciilor situate n apropierea aliniamentului
ce unete dou puncte ale reelei de sprijin (de trasare). Eficiena metodei este condiionat de poziia
punctelor reelei de trasare pe direcia unei axe de coordonate (de exemplu: n cazul reelei topografice
de construcii, cnd calculul elementelor este foarte facil).
Metoda const n materializarea pe teren a punctului C al construciei prin aplicarea unui
segment x n lungul aliniamentului ce unete cele 2 puncte de sprijin (A, B) iar din punctul P astfel
obinut a unei perpendiculare de lungime y.
Pregtirea topografic const din determinarea coordonatelor relative x,y.
Fig. 4.4 Metoda coordonatelor rectangulare
a. n cazul poziiei punctelor de sprijin pe direcia unei axe de coordonate, (figura 4.4)
;
A C
x x x =
A C
y y y = 4.7
b. n cazul unei poziii oarecare a punctelor de sprijin fa de axele de coordonate (figura 4.5)
Fig. 4.5 Elementele de trasat la metoda coordonatelor rectangulare
( ) ( ) ; sin cos
AB A C AB A C
y y x x x + =
( ) ( )
AB A C AB A C
x x y y y sin cos = 4.8
n aceste relaii:
B B A A
y x y x , , , - coordonatele punctelor de sprijin;
C C
y x , -coordonatele punctului C;
AB
- orientarea aliniamentului AB.
Semnul ordonatei este indicat de poziia punctului C fa de direcia AB.
Trasarea punctului C prin aceast metod presupune urmtoarele operaii:
se aeaz teodolitul n staie n punctul A i se vizeaz abscisa x i se materializeaz punctul P;
se instaleaz teodolitul n punctul P i fa de direcia PA se traseaz un unghi
de 100
g
;
pe direcia astfel obinut se va aplica ordonata y rezultnd poziia pe teren a punctului C din
proiect.
Observaii:
ca direcie de referin pentru trasarea unghiului drept se va alege latura cea mai lung (PA sau
PB);
- se alege schema de trasare n aa fel nct y x > .
Controlul poziiei punctului trasat se face prin:
msurarea laturilor construciei rezultate prin trasare i compararea lor cu cele din proiect;
trasarea punctului C utiliznd alt schem de trasare mod de control posibil n cazul reelei
topografice de construcii;
trasarea punctului C prin alt metod (de exemplu metoda coordonatelor polare).
Precizia metodei
Abaterea standard de trasare a punctului C va fi provocat de:
abaterile standard
x
i
y
de aplicare pe teren a creterilor de coordonate x i y;
abaterea standard
de trasare a unghiului drept;
abaterea standard
e
de centrare a teodolitului (doar n punctul A, dac se consider c eroarea de
centrare la trasarea unghiului b este inclus n abaterea standard de trasare a acestui unghi);
abaterea standard de reducie
r
, doar n punctul P;
abaterea standard
f
de fixare pe teren a punctului;
abaterile standard
s
ale punctelor de sprijin, putndu-se scrie relaia:
2 2 2 2
2
2 2 2 2
f r e y x s c
y
+ + +
+ + + = 4.9
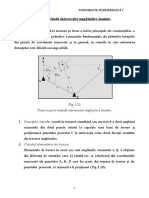
4.3. METODA INTERSECIEI UNGHIULARE NAINTE
Metoda interseciei unghiulare nainte aparine procedeelor clasice de poziionare, trasare i
ridicare ale topografiei inginereti.
Procedeul este recomandat la trasarea axelor principale din puncte de triangulaie (de exemplu
a centrelor infrastructurilor podurilor sau a axelor construciilor hidrotehnice), i n general n situaiile
n care este foarte dificil msurarea distanelor din punctele de sprijin spre punctul de trasat.
Poziia pe teren a punctului C se obine prin aplicarea unghiurilor orizontale i (figura 4.6).
Fig. 4.6 Metoda interseciei unghiulare nainte
Pregtirea topografic a proiectului n vederea trasrii presupune calcularea unghiurilor
orizontale utiliznd coordonatele rectangulare cunoscute ale punctelor de sprijin A i B i cele ale
punctului proiectat C. Calculul se face cu relaiile:
AB
AB
AB
AB
X
Y
tg
= 4.10
AC
AC
AC
AC
X
Y
tg
=
BC
BC
BC
BC
X
Y
tg
=
g
AB BA
200 + = 4.11
BA BC AC AB
= = ; 4.12
Controlul corectitudinii calculului se poate face determinnd unghiul orizontal (figura 4.6):
CB CA
=
i verificnd respectarea condiiei
g
200 = + + .
Trasarea se poate face utiliznd un singur teodolit sau dou teodolite.
n primul caz:
se instaleaz teodolitul n staie n punctul A i fa de direcia AB se aplic unghiul ; direcia
rezultat se materializeaz pe teren prin rui (1 i 2) n zona punctului C (figura 4.7);
se deplaseaz teodolitul n punctul B i se traseaz unghiul rezultnd pe teren punctele 3 i 4
(marcate prin rui);
poziia pe teren a punctului C se va gsi la intersecia unor fire (srme) ntinse ntre punctele 1 i
2, respectiv 3 i 4.
Dac se utilizeaz dou teodolite de aceeai precizie, instalate simultan n punctele A i B, se
traseaz concomitent unghiurile i , poziia punctului C rezultnd:
la intersecia firelor ntinse ntre punctele 1-2 i 3-4;
sau
prin dirijarea (de ctre operatorii celor dou teodolite) a unui lucrtor pn cnd direcia AC va
intersecta direcia BC; aceast modalitate de trasarea este posibil la distane relativ mici (150 m).
Fig. 4.7 Controlul trasrii
Pentru controlul trasrii se poate proceda astfel:
a. se traseaz punctul C prin intersecia unghiular nainte multipl (trasarea se efectueaz din
3 sau mai multe puncte de sprijin) (figura 4.7), cnd pe teren se va obine un triunghi (poligon) de
eroare. Poziia corect a punctului C se va gsi n centrul de greutate al acestei figuri geometrice.
b. se msoar cu precizie unghiurile
i
i
i
trasate i se compar cu cele calculate, diferena dintre
ele trebuind s nu depeasc abaterea admis la trasarea unghiurilor.
Precizia trasrii
Abaterea standard
C
a poziiei punctului C este provocat, n principal de abaterile standard
s
ale datelor iniiale, de abaterea standard a interseciei nainte i de abaterea standard
f
de fixare a
punctului trasat C, putnd fi scris relaia general:
2 2 2 2
f s C
+ + = 4.13
4.4. METODA INTERSECIEI LINIARE
Metoda interseciei liniare se recomand la trasarea punctelor construciilor aflate n
apropierea punctelor reelei topografice de sprijin, pe teren plan, fr obstacole. Aceast metod se
poate utiliza i la trasarea n plan a axelor n halele industriale, precum i la montaj.
Poziia pe teren a unui punct al construciei se obine prin aplicarea, din punctele A i B ale
bazei de trasare a distanelor a i b (figura 4.8).
Fig. 4.8 Metoda interseciei liniare
Pregtirea topografic a proiectului n vederea aplicrii lui pe teren presupune calcularea, din
coordonatele rectangulare ale punctelor A i B ale reelei de sprijin i din coordonatele punctului
proiectat C, a distanelor orizontale a i b.
2 2
AC AC
Y X a + = ;
2 2
BC BC
Y X b + = 4.14
Trasarea se efectueaz cu ajutorul benzilor de oel (rulete sau fire de invar) n lungime maxim
de 2024 m. Aplicarea distanelor orizontale a i b se poate face concomitent (cu dou instrumente de
msurare a distanelor de acelai tip), sau prin trasarea pe teren de arce de cerc de raz a i b, din
punctele A i B cu aceeai rulet. La intersecia acestor arce de cerc se va gsi punctul C.
Controlul trasrii se realizeaz prin msurarea pe teren a laturii C
1
C
2
a construciei trasate
(figura 4.9) i compararea ei cu cea din proiect:
( )
max max
l l
pr
4.15
n care
max
reprezint abaterea maxim admis.
Fig. 4.9 Controlul trasrii
Dac se traseaz conturul unei fundaii, se compar diagonalele msurate cu cele din proiect.
4.5. METODA INTERSECIEI UNGHIULARE NAPOI
Metoda interseciei unghiulare napoi se utilizeaz la trasarea cu precizie a unor puncte situate
n zone greu accesibile, precum centrele infrastructurilor podurilor sau punctele fundamentale ale
ploturilor barajelor de beton.
Trasarea prin aceast metod presupune urmtoarele etape:
se traseaz provizoriu punctul C, ale crui coordonate sunt indicate n proiect, prin metoda
coordonatelor polare, metoda interseciei liniare sau prin alt metod, obinndu-se pe teren un punct
apropiat C;
se staioneaz cu teodolitul n punctul C trasat provizoriu i se determin unghiurile
orizontale
3 2 1
, , din direciile orizontale msurate spre trei puncte A, B, E, din reeaua de trasare.
Msurtorile de fac prin metoda seriilor, efectund 34 serii;
se calculeaz coordonatele punctului C, prin retrointersecie;
se calculeaz reduciile (coreciile) ce trebuie aplicate n punctul C, pentru a se obine
poziia pe teren a punctului C.
Dac se aplic reducii polare elementele de trasat vor fi (figura 4.10):
2
'
2
'
'
C C C C
Y X C C + = ;
E C C C ' '
= 4.16
n caz c se opteaz pentru corecii (reducii) rectangulare, elementele de trasat se vor obine
cu relaiile:
' C C
X X x = ;
' C c
Y Y y = 4.17
n care X
C
, Y
C
reprezint coordonatele proiectate ale punctului C, iar X
C
, Y
C
sunt coordonatele
punctului C trasat provizoriu.
Aplicarea acestor corecii se face astfel:
n cazul reduciilor polare se staioneaz cu teodolitul n punctul C, se traseaz, cu luneta n
poziia I, unghiul orizontal , fa de direcia CE, iar pe direcia rezultat se va aplica distana
orizontal CC.
n cazul reduciilor rectangulare cu teodolitul instalat n punctul C se vizeaz punctul E, avnd
introdus la cercul orizontal citirea
E C'
, se rotete luneta pn cnd se va obine la cecul orizontal
citirea 0
g
,00
c
00
cc
; aceast direcie coincide cu axa OX a sistemului rectangular de axe, pe ea
aplicndu-se corecia x ; perpendicular pe aceast direcie se aplic corecia y .
Fig. 4.10 Metoda interseciei napoi
Controlul trasrii
Se instaleaz teodolitul n punctul trasat C, i se msoar unghiurile orizontale
mas
1
,
mas
2
i
mas
3
, care se compar cu unghiurile orizontale
calc
1
,
calc
2
,
calc
3
, determinate din coordonatele
rectangulare ale punctelor A, B, E i C, fiind necesar s fie satisfcut condiia:
( )
calc
i
mas
i
n care
este abaterea maxim admis la msurarea unghiurilor.
Precizia metodei
Abaterea standard
C
, de trasare a punctului C se evalueaz utiliznd relaia de principiu:
( )
2 2
3
2
2
2
1
2
3
1
f C
+ + + + = 4.18
unde:
C
este abaterea standard de trasare a punctului C prin intersecie napoi, provocat de
erorile medii de msurare a unghiurilor
1
,
2
i
3
;
1
,
2
,
3
sunt abaterile standard datorate erorilor de poziie reciproc a punctelor A, B i E
(figura 4.10);
f
este abaterea standard de fixare.
4.6. METODA DRUMUIRII POLIGONOMETRICE
Punctele de trasat C
1
, C
2
, C
3
ale construciei ce trebuie realizate se includ ntr-o drumuire
proiectat (drumuire poligonometric) care se poate sprijini la capete pe punctele reelei de sprijin A,
D (figura 4.11).
Aceast metod este recomandat la trasarea axelor drumurilor i cilor ferate, la trasarea
axelor galeriilor (de aduciune a apei, metrou, tuneluri) a canalelor magistrale i a reelelor tehnico-
edilitare.
Pregtirea topografic presupune determinarea distanelor d
1
, d
2
, d
3
i a unghiurilor
orizontale
1
,
2
,
3
.Calculul se face n funcie de coordonatele cunoscute ale punctelor de
sprijin (A, B, D, E) i de coordonatele din proiect ale punctelor C
1
, C
2
, C
3
utiliznd relaiile (5.1),
(5.2) i (5.3).
Fig. 4.11 Metoda drumuirii poligonometrice
Trasarea se face prin metoda coordonatelor polare aplicnd succesiv pe teren punctul C
1
, (din
punctul de sprijin A, fa de direcia de referin AB), C
2
(din punctul C
1
trasat anterior, aplicnd
2
i
d
2
), amd. Pentru control, trebuie ca punctul D trasat din C
3
s coincid cu poziia pe teren a punctului
corespunztor din reeaua de sprijin (iar unghiul
5
care se va msura din punctul D s coincid cu cel
determinat din coordonate).
n cazul trasrii axelor galeriilor este posibil ca trasarea s nceap concomitent din cele dou
capete ale galeriei, strpungerea acesteia efectundu-se undeva pe traseul drumuirii proiectate.
Precizia metodei
Abaterea standard admis la trasarea punctelor prin aceast metod se obine n funcie de
abaterea maxim admis (1:10):
n cazul drumuirilor poligonometrice suspendate (n vnt), cnd punctul cel mai slab este la
captul drumuirii vom avea:
=
3 2
4.19
n cazul drumuirilor poligonometrice sprijinite la capete punctul cel mai slab de determinat
se gsete la mijlocul drumuirii, abaterea standard de poziie a acestui punct fiind egal cu jumtate
din abaterea standard a punctului final:
5 , 0 =
S
4.20
n acest ultim caz, cel mai des ntlnit n activitatea practic i cel mai de preferat, abaterea standard
efectiv
S
se poate obine:
n cazul drumuirilor poligonometrice ntinse (unghiurile
G
200
1
), cu relaia:
[ ]
+ =
12
3
2
2 2
n
d
d S
4.21
n cazul drumuirilor poligonometrice ncovoiate, cu relaia:
+
=
+ =
1
1
2
,
2
2 2
n
i
g i d S
D
4.22
n aceste relaii:
d
reprezint abaterile standard de trasare ale distanelor d (laturile drumuirii);
reprezint abaterea standard de trasare ale unghiurilor orizontale;
D
i,g
reprezint distana de la punctul i pn la centrul de greutate al drumuirii ncovoiate
[ ] [ ]
+
=
+
=
1
,
1 n
Y
Y
n
X
X
G G
;
n reprezint numrul laturilor drumuirii.
4.7. METODA ALINIAMENTULUI
Metoda aliniamentului face parte din categoria metodelor de baz pentru trasarea n plan a
punctelor construciilor, fiind utilizat la trasarea punctelor pe axele rectilinii ale construciilor (poduri,
baraje, poduri rulante, tunele) ca i la montajul subansamblelor liniilor tehnologice.
Aceast metod poate fi privit ca o variant a metodei coordonatelor polare (figura 4.1) la
care unghiul polar =0. Punctul C, de trasat, se va gsi, din aceast cauz, pe aliniamentul AB,
format din punctul de staie al instrumentului A i punctul de orientare B (figura 4.12)
Fig. 4.12 Principiul metodei aliniamentului
Trasarea presupune, ca prim etap, identificarea sau materializarea pe teren a aliniamentului
AB. Se instaleaz apoi teodolitul n punctul A i se vizeaz inta de vizare din punctul B, n
aliniamentul optic astfel creat aplicndu-se distana D, corespunztoare punctului C de trasat.
Precizia metodei
Abaterea standard
C
de trasare a punctului C este provocat de abaterea standard
1
de
realizare a aliniamentului AB, de abaterea standard
2
de trasare a distanei D i de abaterea standard
f
de fixare a punctului C, conform relaiei:
2 2
2
2
1 f C
+ + = 4.23
Abaterea standard de realizare a aliniamentului
1
efectiv se poate calcula utiliznd expresia:
2 2 2 2 2
1
2
CE foc v r e s
+ + + + + = 4.24
n care:
s
abaterea standard a punctelor de sprijin;
e
abaterea standard de centrare;
abaterea standard de reducie;
abaterea standard de vizare;
foc
abaterea standard de focusare;
CE
abaterea standard datorat condiiilor exterioare.
4.8. METODA INTERSECIEI REPERATE
Este utilizat la trasarea i retrasarea punctelor caracteristice ale construciilor. n principiu,
poziia unui punct se obine la intersecia a dou aliniamente materializate n afara construciei.
Aliniamentele pot fi realizate optic sau mecanic, cu ajutorul unor fire. n funcie de unghiul de
intersecie al aliniamentelor se deosebesc dou cazuri:
a) Aliniamentele se intersecteaz n unghi drept
Aceast variant a metodei este utilizat la trasarea construciilor civile (fundaii, ziduri) i
industriale (fundaii de hale, stlpi, subansamble de echipamente tehnologice). Aliniamentele se
fixeaz pe mprejmuirile de trasare (figura. 4.13b).
Trasarea
Pentru aplicarea pe teren a punctului C, de cte ori este nevoie, cele dou aliniamente (1-1 i
2-2) se materializeaz pe teren, dup caz, mecanic, prin intersecie de fire, sau optic, prin utilizarea
simultan a dou teodolite. La intersecia aliniamentelor se va fixa pe teren punctul C.
b) Aliniamentele se intersecteaz sub un unghi oarecare.
Acest caz de intersecie reperat este ntlnit n special la trasarea punctelor situate pe axele
podurilor.
Trasarea
Pentru trasarea punctului C
1
situat pe axa podului (figura 4.14), se vor utiliza aliniamentele
A
1
-S
1
i B
1
-S
1
, materializate la capete prin pilatri. Se vizeaz simultan cu dou teodolite instalate n
punctele A
1
i B
1
mrcile de vizare fixate pe pilatri S
1
i S
1
, materializndu-se optic cele dou
aliniamente, la intersecia crora se va afla punctul C
1
.
Fig. 4.13 Aliniamentele se intersecteaz n unghi drept
a trasarea punctelor b mprejmuirea de trasare
Fig. 4.14 Aliniamentele se intersecteaz sub un unghi oarecare
n mod asemntor, poziia pe teren a punctului C
2
se va obine la intersecia aliniamentelor
A
2
S
2
i B
2
S
2
(pe pilatri A
2
i B
2
se vor fixa teodolite iar pe pilatri S
2
i S
2
, mrci de vizare).
Precizia metodei
Abaterea standard de trasare a punctului C se determin cu relaia:
2 2
2
2
1 f C
+ + =
4.25
n care:
1
,
2
abaterile standard de construire a celor dou aliniamente care se intersecteaz;
f
abaterea standard de fixare.
Abaterile standard
1
i
2
ale celor dou aliniamente se determin conform relaiei 4.24.
5. NTOCMIREA PROIECTELOR DE SISTEMATIZARE
PE VERTICAL
5.1. NOIUNI INTRODUCTIVE
A. Sistematizarea vertical const n repartizarea pe vertical a reliefului unei localiti, pentru
a asigura transportul, auto i proiectara reelelor edilitare, ct i scurgerea apelor.
nclinrile prea mari ale reliefului pe teritoriul urban pot mpiedica efectuarea construciilor
mari, cum i circulaiia, iar n cazul unui relief plan (nclinri foarte mici) apar greuti n ceea ce
privete scurgerea apelor de ploaie i la proiectarea canalizrii n oras.
De aceea, la ntocmirea proiectului de sistematizare orizontal trebuie s se rezolve i
sistematizarea vertical dup urmtoarele principii de baz:
- rezolvarea de la "general" la "particular"', adic rezolvarea n ansamblu a sistematizrii
verticale a ntregului teritoriu urban; apoi, pe baza materialului rezultat, se proiecteaz sistematizarea
de detaliu;
- sistematizarea vertical se efectueaz n acelai timp i n concordan cu sistematizarea
orizontal a teritoriului oraului.
Sistematizarea vertical a unui teritoriu urban trebuie s realizeze urmatoarele:
a) s asigure circulaia (transportul) conform pantelor proiectate longitudinale i transversale
admise pentru treceri (magistrale, strzi, drumuri, stradele, trotuare etc.), innd seama de relieful
natural existent;
b) s asigure scurgerea apelor (drenajul) i proiectarea canalizrii prin gravitaie pe suprafaa
teritoriului urban;
c) s permit obinerea de volume minime de terasamente (spturi i umpluturi), cum i
maximul de economie, n transportul pamntului de sptur (obinut la sparea gropilor de fundaii
ale cldirilor i reelelor subterane) n umpluturile proiectate, sau n depozite. n proiectarea lucrrilor
de terasamente pe teritoriul oraului se accept, n general, principiul egalitii volumelor de sptur
cu cele de umplutur.
B. Din punct de vedere topografic, sistematizarea vertical comport urmtoarele aspecte:
a) lucrri topografice necesare asigurrii cu documentaie topografic a proiectrii
sistematizrii verticale; reprezint, de fapt, ridicarea altimetric a teritoriului oraului. Pe baza acestei
ridicri se obin cotele i se traseaz curbele de nivel pe planurile 1:5ooo (sau l:loooo), cu echidistana
de 1 m si 2 m, precum i pe planurile la scrile 1:2ooo, 1:1ooo i l:5oo, la care echidistana este
cuprinsa ntre 1m i o,5o m, mai rar o,25 m. Planurile la scara 1:5ooo (l:loooo) sunt necesare
sistematizrii verticale de ansamblu, iar cele la scrile 1:2ooo, 1:1 ooo sau 1:5oo, sunt necesare
sistematizrii de detaliu.
b) Lucrri necesare ntocmirii proiectului de sistematizare vertical:
- calculul cotelor interseciilor axelor trecerilor i ale colurilor cartierelor s-au a cvartalelor
proiectate;
- trasarea pe planuri a curbelor de nivel proiectate (ntocmirea planurilor de sisteinatizare
vertical);
- calculul i ntocmirea profilului longitudinal n lungul axei trecerii;
- calculul volumelor de terasamente pe suprafaa teritoriului urban sau a noului cartier;
- ntocmirea cartogramei terasamentelor;
- ntocmirea profilelor longitudinale i transversale pe teritoriul urban, acolo unde este
necesar;
- ntocmirea de tabele cu coordonatele i cotele liniilor roii.
c) Lucrri la pregatirea topografica a proiectului de sistematizare pe vertical:
- verificarea proiectului de sistematizare cu realitatea, n vederea aplicrii pe teren;
- efectuarea de lucrri de teren i de calcule, privitoare la determinarea cotelor reperilor de
nivelment care mai sunt necesari pentru trasare;
- calculul diferenelor de nivel, care trebuie aplicate pe teren, n raport de cotele reperilor de
lucru i conform cotelor din proiectul de sistematizare;
- calculul preciziei de aplicare a proiectului.
d) Aplicarea pe teren a proiectului de sistematizare vertical.
5.2 CONINUTUL PROIECTULUI DE SISTEMATIZARE PE
VERTICAL
A. n faza proiectului de ansamblu se deosebesc ca piese ale proiectului:
- schema sistematizrii verticale a ntregului teritoriu urban;
- 1-3 profile longitudinale pe axele principalelor magistrale ale localitii sau a noului cartier;
- calcule estimative de terasamente globale pe tot teritoriul i calcule de terasamente pe zonele
construciilor speciale (aeroporturi, parcuri industriale).
S-au menionat numai piesele care intereseaz direct pe geodez. Piesele proiectului, cum i
documentaia topografic, se vor definitiva ca denumiri i coninut potrivit caietelor de sarcini
ntocmite de ctre beneficiarul lucrrii.
Schema de sistematizare de ansamblu se ntocmete pe planul topografic la scara 1:5ooo sau
1:loooo, cu echidistana curbelor de nivel de 1-2 m.
Teritoriul urban se sistematizeaz astfel nct pentru apele meteorice (de ploaie, din zapad
etc,) s se asigure o scurgere liber de pe suprafaa cartierelor n strzile oraului, iar apoi, din acestea,
n bazinele naturale sau n canale.
nclinrile (pantele) longitudinale trebuie s fie n concordana cu cerinele transportului i
asigurarea scurgerii apelor. n funcie de tipul de mbrcminte al trecerilor, pantele longitudinale ale
strzilor se admit n limitele de la o,oo5 pn la o,loo.Pe schema de sistematizare vertical, se trec
cotele proiectate i cele existente ale axelor trecerilor, direcia i valoarea nclinrilor, aa cum se arat
n figura 5.1.
Schemele generale de sistematizare vertical dup aprobare sunt documente obligatorii pentru
toate societile care efectueaz construcii n orae; schemele generale de sistematizare vertical sunt
nsoite de tabele cu coordonatele liniilor roii, ct i cu cotele proiectate.
B. n faza proiectului de execuie pe baza schemei generale de sistematizare vertical, se
ntocmete proiectul de sistematizare de detaliu (folosete planurile topografice la scrile 1:2ooo;
1:1ooo si 1:5oo). Pentru a asigura efectuarea construciilor de prim urgen n ora, proiectul poate fi
ntocmit pe pri corespunztoare diferitelor bazine (limitate de liniile de creast) sau ntre liniile
talvegurilor naturale aflate pe strzi i piee.
Pe planurile topografice ale teritoriilor urbane neconstruite, n afar de curbele de nivel, se vor
trece i cotele reelei de ptrate cu latura de 2o m.
Pe planurile teritoriilor construite se vor trece cotele (deasupra nivelului marii) colurilor
cartierelor i ale tuturor punctelor caracteristice ale reliefului.
nainte de elaborarea proiectului cu detaliile de sistematizare vertical, se trece pe plan liniile
roii ale strzilor i pieelor, ale zonelor verzi, contururile podurilor, cheiurilor, tunelurilor, cilor
ferate, ale staiilor de cale ferat, ale liniilor de tranvai i troleibuze, precum si ale altor elemente luate
din planul de sistematizare orizontal.
n procesul elaborrii detaliilor de sistematizare vertical se va ine seama ca relieful natural s
fie ct mai puin modificat i s se obin un volum minim de lucrri de terasamente.
n calculul volumului lucrrilor de terasamente se va ine seama i de volumul de pmnt ce
va fi scos la efectuarea construciilor subterane (alimentare cu ap, canalizare etc.).
Piesele proiectului de detaliu al sistematizrii verticale permit s se proiecteze corect
fundaiile cldirilor i ale altor construcii, adncimea de aezare a conductelor, cablurilor i a
canalelor, puurilor, chiar dac n localitatea respectiv s-a realizat numai parial sistematizarea
trecerilor i a cartierelor.
La alctuirea proiectului de sistematizare vertical a construciilor speciale (stadioane,
aeroporturi, tuneluri, teritorii rezervate parcurilor industriale, etc.) va trebui s se in seama i de
condiiile tennice specifice acestor lucrri. n aceste cazuri, ca date de plecare (iniiale) pentru
ntocmirea proiectului vor servi cotele liniilor roii ale trecerilor n limitele teritoriului pe care se vor
proiecta aceste construcii.
Pentru a crea condiii optime acestor construcii se poate revizui sistematizarea vertical a
ctorva treceri proiectate n aceast zon, ns dac teritoriul se afl n incinta oraului, proiectul de
sistematizare va trebui legat sau de schema general aprobat a sistematizrii verticale a oraului, sau
de proiectul de detaliu al sistematizrii verticale.
Piesele desenate i scrise care intr n compunerea detaliilor de sistematizare vertical i care
intereseaz direct pe geodez sunt urmtoarele:
a) planul de sistematizare vertical n detaliu; este un extras de pe planul topografic la scara
mare (1:2ooo, 1:1ooo si 1:5oo) al teritoriului urban;
b) scheme de sistematizare vertical n detaliu a trecerilor; se ntocmesc de obicei la scri mari
1:2oo, 1:loo, l:5o;
c) profilele longitudinale pe axele tuturor trecerilor, la scara lungimilor corespunztoare scrii
planului de sistematizare de detaliu;
d) profile transversale la scari mari, pe direciile cerute de proiectant, sau n lungul laturilor
ptratelor cartogramei terasamentelor, dac este necesar;
e) cartograma terasamentelor, cu tabele de calcul al suprafetelor i volumelor de pmnt, de pe
teritoriul urban;
f) tabele cu cotele proiectate i cu reperii de nivelment urban existeni, inclusiv descrierea lor
topografic.
C. Mrimile admisibile ale elementelor de proiectare (valori aproximative) .
- Pantele trecerilor proiectate nu trebuie s depeasc:
- 0.04 (4%), pe magistralele principale urbane;
- 0.06 (6%), pe magistralele secundare;
- 0.10 (lo%), pe strzile teritoriilor construite;
- 0,03 (3%) n apropierea pieelor i ncruciarilor;
- 0,5 (5%), n apropierea podurilor i viaductelor. Se admite creterea valorilor de mai sus:
- cu 1% - n condiii grele;
-cu 2%- n conditii grele n apropierea pieelor, ncruciarilor, podurilor;
- cu 2% - n muni;
- cu 3% - n cazul drumurilor de acces.
Panta minim n lungul axei trecerii, care asigur scurgerea apei pe anuri, rigole, se admite
egal cu 0.005 (0,5%).
n diferite cazuri, exceptnd cele de pe suprafeele mici, se poate admite panta minim de 0,003
(0,3%).
5.3 PROCEDEE DE NTOCMIRE A PROIECTULUI
DE SISTEMATIZARE VERTICAL
Se deosebesc dou procedee principale: procedeul curbelor de nivel proiectate i procedeul
profilelor. Cel mai mult se foloseste primul procedeu.
5.3.1. Procedeul curbelor de nivel proiectate
Acest procedeu const n aceea c pe planul topografic la scara 1:1ooo (cel mai bine la scara
1:5oo) se trec curbe de nivel proiectate, obinute prin modificarea reliefului natural existent, n urma
proiectrii de spturi i umpluturi. Deoarece la proiectarea reliefului se urmrete s se obin aceeai
pant n sectorul respectiv, curbele de nivel proiectate ntre liniile de schimbare a pantelor se traseaz
prin linii drepte i aflate la distane egale ntre ele.
Echidistana curbelor de nivel proiectate se alege n funcie de scara planului (pe care se face
proiectarea reliefului), ct i de formele reliefului existent pe teren. n cazul unui relief plan, pentru
planurile la scara 1:500, echidistana proiectat (E
pr
) cel mai des folosit este de 0.10 m.
Determinarea elementelor, pentru trasarea pe plan a curbelor de nivel proiectate pe prile
carosabile i trotuarele trecerilor dintr-un centru populat, se desfoara astfel (figura 5.2 i figura 5.3).
A. Se proiecteaz panta i n lungul axei trecerii (panta longitudinal). Alegerea marimii
pantei i se face pe baza studiului reliefului existent pe trecerea (magistral, strad, stradel) dat.
Pentru aceasta, se calculeaz valoarea medie a pantei terenului existent pe toat lungimea trecerii, sau
intre punctele de schimbare pronuntat. Marimea si directia pantei i vor fi ct mai apropiate de
valoarea
medie si de
direcia pantei
reliefului
existent.
Fig. 5.1 Plan
general de
sistematizare pe
vertical
n
figura 5.2,
mrimea pantei
longitudinale i
trebuie
asigurat ntre
punctele A i
B, iar panta coboar de la A spre B. Se urmrete, n acelai timp, ca volumul lucrrilor de terasamente
s fie minim, iar volumul spturilor s fie aproximativ egal cu volumul umpluturilor.
B. Se determin mrimile cotelor proiectate de pe axa trecerii, care vor servi drept date de
plecare pentru restul calculelor. Acestea se aleg (fiind de obicei cotele punctelor de intersecie a
trecerilor din piee sau incruciri) din schema general de sistematizare vertical (figura 5.1).
C. Cotele proiectate ale celorlalte puncte aflate in aceeai seciune transversal se determin
prin trasarea pe planul de sistematizare de detaliu (pe care se vor construi curbele de nivel proiectate) a
unei perpendiculare pe
axa trecerii n punctul a crui cot se cunoate ca la B (practic, acest punct este
nceputul sau mijlocul trecerii).
Se ine seama de mrimile proiectate ale profilului transversal al trecerii (figura 5.1) cnd, pornind
de la cota H
C
a punctului din axa C, se vor determina cotele proiectate de pe linia faadei F
1
, aflate in
aceeai seciune transversal. Sensul pantelor transversale ale parilor carosabile (i
tr
) i al pantelor
transversale, ale trotuarelor (i
T
) este ca n figura 5.2. Panta longitudinal a trotuarelor este egal cu panta
longitudinal i a axei trecerii. Limile trotuarelor i prii carosabile sunt, respectiv, t i b (figura 5.2).
Fig. 5.2 Profilul transversal cu elementele sistematizrii verticale
D. Se calculeaz distana d de pe plan (figura 5.2), ntre curbele de nivel vecine care se vor proiecta, cu
formula :
d = Epr : (i . n), 5.1
n care : E este echidistana dintre curbele de nivel proiectate;
i - panta longitudinal, a axei trecerii;
n - numitorul scrii numerice a planului.
De exemplu, dac panta proiectat pe strada din cartierul locuit este i = 0,008, distana de pe
planul la scara l:5oo, ntre curbele de nivel proiectate, avnd echidistana Epr= o,lo m, este:
d = o,lo m : (0,008 x 5oo) = o,o25 m sau 25 mm.
E. Se determin restul elementelor pentru trasarea pe plan a curbelor de nivel proiectate.
Curbele de nivel proiectate nu se pot trasa perpendicular pe axa trecerii, deoarece partea carosabil are
nclinarea transversal itr (figura 5.2).
a) Se determin diferena n nlime hr , dintre punctul C din axa ( a crui cot H
C
este
cunoscut ca la B) i punctul R1, aflat pe rigola trecerii n aceeai seciune transversal (figura 5.3), cu
formula:
hr = itr (b:2). 5.2
n exemplul ales, dac itr = 0.002 i b = 9 m, atunci hr = =0,09 m.
b) Se calculeaz distana a pe plan (figura 5.3), dintre punctul (C) din ax si punctul (R2) din
rigol, ce are aceeai cot HC. Punctul R2 din rigola trecerii va fi deplasat nspre partea ridicat a axei
trecerii cu distana a, care se calculeaz pornind de la relaia (5.1) n care se nlocuiete echidistana
Epr cu mrimea hr, adic:
a = hr : (i . n) 5.3
n exemplul dat: a = 0.09 (0.008 x 500) = 0.0225 m sau 22.5 mm.
Pe plan, punctul R2 se gasete aplicnd distana a de la linia M-M dus perpendicular pe axa trecerii n
punctul C, n sensul de cretere a cotelor pe axa trecerii (figura 5.3).
Procednd analog i n jumtatea cealalt a prii carosabile, se obine prin simetrie punctul
R2. Cu mrimile d i a s-au determinat pe plan punctele prin care se traseaz curbele de nivel
proiectate pe partea carosabil (figura 5.3).
c) Se calculeaz distana pe plan (msurat n sensul de coborre a pantei longitudinale i pe linia
bordurii trotuarului Q-Q si Q=Q) care determin punctul de pe bordura trotuarului care are aceeai cot
(H
C
) cu a punctului C de pe ax. Aadar, distana i determin pe plan punctul T al curbei de nivel proiectate
pe trotuar i care are aceeai cot H
C
. n figura 326 se observ c bordura trotuarului este mai sus dect
rigola, cu mrimea h
T
; atunci, pe liniile Q-Q i Q-Q, curba de nivel de pe trotuar va avea aceeai cot (H
C
)
ca i curba de nivel care trece prin punctul R1 al rigolei, dac se va deplasa cu distana l, msurat n sensul
de coborre a pantei longitudinale: i (figura 5.3). Atunci:
l = h
T
:( i . n ) 5.4
n exemplul dat, dac h
T
= o,15, mrimea l va fi: l = 0,15: (0,008 x 5oo) = 0.038 m sau 38
mm.
d) Se determin distana c, care se fixeaz pe linia faadei al doilea punct al curbei de nivel de pe
trotuar i care are aceeai cot H
C
cu punctul C din ax. Mrimea c se msoar pe linia faadelor P-P i P-
P, fa de perpendiculara M1M1, dus prin punctul T aflat pe linia Q-Q (punctul T pe linia Q-Q), cnd
se obin punctele Z i Z. Mrimea c se msoar n sensul de coborre a pantei longitudinale i (figura 5.3).
Formula de calcul al distanei c se determin pornind de la relaia (5.1), n care se nlocuiete
echidistana Epr cu mrimea h
F
-diferena de nlime dintre cotele proiectate ale punctului F (aflat pe
linia faadei P-P) i punctul T (aflat pe linia bordurii trotuarului), ambele puncte gsindu-se pe plan pe
aceeai perpendicular M1-M1, dus prin punctul T (figura 5.3).
Atunci:
H
F
= H
C
+ i
T
. t 5.5
i
h
F
= H
F
- H
C
, 5.6
iar
c = h
F
: ( i . n ), 5.7
n care:
H
F
este cota punctului F;
H
C
- cota punctului T (ce are deci aceeai cot ca punctul C din ax), v. aliniatul c).
Fig. 5.3 Plan de situaie cu elementele sistematizrii verticale
n exemplul analizat, dac H
C
= 12o,oo m, iar limea trotuarului t = 2,5 m atunci:H
F
= 12o,oo
+ o,o2 x 2,5 = 12o,o5 m; hF = o,o5 m;
c = 0,05: (0,008 x 5oo) = o,ol25 m sau 12,5 mm.
e) Se traseaz pe plan restul curbelor de nivel proiectate, separat pe partea carosabil i pe
trotuare.
Distanele dintre curbele de nivel pe axa trecerii vor fi egale cu d, iar curbele de nivel vor fi
paralele ntre ele. Distanele dintre curbele de nivel aflate pe trotuare vor fi de asemenea egale cu d i,
respectiv, paralele ntre ele.
Figura 5.4 Moduri de ntocmire a panurilor cu curbe de nivel proiectate
Paralelismul dintre fiecare categorie de curbe de nivel proiectate se va pstra pentru aceleai
mrimi ale pantelor longitudinale i transversale.
Decalajul pe plan dintre curbele de nivel de aceeai cot, aflate pe trotuar i pe partea
carosabil a trecerii, se determin prin distana l.
F. La ncruciri, n funcie de direcia pantelor de pe trecerile care se intersecteaz, curbele de
nivel proiectate vor avea aspectul din figura 5.5.
La proiectarea ncrucirilor, nu se admit rigole dispuse transversal pe magistrale. Una din
strzi va trebui s aib aceeai pant ca la ncruciare, astfel ca s asigure scurgerea apei de pe
suprafa. n caz contrar, se va proiecta scurgerea apei la ncruciri, ca sa aib loc n subteran n
colectoarele de ape meteorice.
Profilul transversal al strzii cartierului locuit se va transforma, n apropiere de magistral, din
profil cu doua pante ntr-un profil cu o singur pant transversal egal cu panta longitudinal a
magistralei.
G. ntocmirea proiectului sisematizrii verticale a teritoriului din interiorul cartierului. Drept
date iniiale, pentru proiectarea reliefului pe teritoriile din interiorul cartierului, se folosesc cotele
proiectate ale sistematizrii verticale ale strzilor.
Pantele trecerilor pe teritoriile din interiorul cartierelor, nu trebuie s depeasc o,lo, iar pe
ieirile din cartiere, pantele scad pn la 0.01 0.03, n funcie de tipul mbrcmintei trecerii.
Sistemul trecerilor din interiorul cartierului, mpreun cu trecerile pentru pietoni, trebuie s fie analizat
ca o reea care colecteaz apele de ploaie de pe cartiere.
Nu se admite scurgerea apelor de pe strzi n interiorul cartierului, iar dac teritoriul
cartierului este aezat mai jos dect rigola strzii, se proiecteaz umpluturi de pmnt care ridic
terenul cu 1-2% pe o lime de 2o - 25 m, iar mai departe, panta se asigur spre interiorul cartierului.
Apa de suprafa se evacueaz sau pe strada vecin, sau in reeaua subteran.
Panta pe terenurile parcurilor sportive i de odihn nu trebuie sa depeasc 0.005 (0,5%). Terenurile
de sport i de distracii se recomand s fie mai ridicate dect celelalte teritorii din interiorul
cartierului cu 0,5 m, avnd proiectai n jur perei i pante prin sdire de plantaii.
Pe pante repezi se proiecteaz terase aezate la diferite niveluri si desparite prin trepte sau
prin pante uoare de plantaii. Panta teraselor se admite de circa 0.005, iar n sens transversal, de circa
0.01 0.02 spre mijlocul terasei.
innd seama de relief, se studiaz liniile de creast i direciile principale ale pantelor. Pe baza
acestora, se determin, pantele proiectate i se traseaz curbele de nivel proiectate. Pentru aceasta, se ine
seama de volumul minim al lucrrilor de terasamente, care va fi hotrt de proiectarea cea mai judicioas a
liniilor principale ale scurgerilor. n mijlocul cartierului, nu se admite existena terenului orizontal
(mpiedic scurgerea apelor de suprafa). Nu se admite ca apa care se scurge de pe suprafaa cartierului s
curg spre cldirile existente sau proiectate (deoarece apa va ptrunde n fundaii i va provoca tasarea
cldirilor). De aceea, cel mai bine va fi cnd pantele vor fi ndreptate de la aceste cldiri (proiectate sau
existente) ctre exteriorul cartierului.
Planul de sistematizare vertical cu curbe de nivel proiectate, al unei poriuni din interiorul
cartierului unui teritoriu urban, se reprezint n figura 5.4.
6. METODE TOPO-GEODEZICE I APORTUL ACESTORA LA
STUDIUL I URMRIREA DEPLASRILOR I DEFORMAIILOR
CONSTRUCIILOR
n cadrul acestui capitol am prezentat principalele metode topo-geodezice de msurare a
deplasrilor i deformaiilor verticale ale construciilor.
Dezvoltarea tehnicii msurtorilor a creat posibilitatea de a observa i pune n eviden modul
de comportare a construciilor, valoarea deplasrilor acestora, i compararea deplasrilor reale cu
deplasrile i deformaiile probabile, prevzute n calcule nc din momentul proiectrii acestora.
Observnd modificrile n timp a construciilor, din punct de vedere geometric deplasrile i
deformaiile acestora se pot clasifica n trei categorii majore i anume:
Deplasri i deformaii pe vertical;
Deplasri i deformaii pe orizontal sau n plan;
Rotiri sau nclinri ale construciilor nalte.
6.1 METODE TOPO-GEODEZICE DE MSURARE
A DEPLASRILOR I DEFORMAIILOR VERTICALE
ALE CONSTRUCIILOR
O importan deosebit n analiza comportrii construciilor, att n timpul ncercrilor pe
modele sau la scar natural, ct i dup darea lor n folosin i exploatare o au datele privind
deplasrile pe vertical ale acestora.
Deoarece msurtorile topo-geodezice permit doar analiza construciei n funcie de caracterul
i mrimea deplasrilor verticale, ele vor trebui corelate cu observarea i studierea regimului apelor
subterane, mecanica pmnturilor, n scopul descoperirii originii acestor deplasri i indicarea
posibilitilor de eliminare a lor.
Principiul msurrii deplasrilor i deformaiilor pe vertical const n determinarea repetat a
cotelor punctelor de control, numite i mrci de tasare, fixate pe construcia studiat, n raport cu mai
muli reperi fici, amplasai pe terenuri nedeformabile i n afara zonei de influen a construciei.
Punctele de control ncastrate n construcie, se deplaseaz mpreun cu construcia i deci prin
observaii efectuate asupra lor, se pot stabili valorile deplasrilor verticale.
Metodele utilizate la determinarea tasrilor construciilor se pot grupa dup cum urmeaz:
metoda nivelmentului geometric de nalt precizie;
metoda nivelmentului trigonometric de precizie;
metoda nivelmentului hidrostatic.
Mrimea deplasrilor verticale, tasri sau ridicri, se pot determina prin metode numerice
semiriguroase, folosind prelucrarea datelor msurtorilor din teren prin metoda celor mai mici ptrate.
Alegerea se face n funcie de natura i precizia studiului efectuat.
6.1.1 Marcarea punctelor reelelor de nivelment utilizate la urmrirea
deformaiilor construciilor
Toate tipurile de reperi folosii pentru realizarea msurtorilor topografice specifice urmririi
n timp a construciilor se marcheaz sub forma unor reperi convenionali care respect normativele n
vigoare din ara noastr.
6.1.1.1 Materializarea reperilor de control
Reperii de control se pot marca pe cldiri, pe stnci stabile sau pe pilatri de beton construii
pe teren.
Dac se dorete amplasarea acestora pe cldiri se ine cont de faptul c acestea trebuie s fie
consolidate, s fie exploatate de cel puin cinci ani i s nu fie expuse diferitelor influene interioare sau
exterioare (trepidaii din cauza exploatrii, terenuri inundabile, etc.). Din acest punct de vedere cel mai bine
corespund cldirile publice unde reperul de control se ncastreaz n apropierea colurilor construciei,
avnd n vedere asigurarea condiiilor de stabilitate a acestora. n literatura de specialitate se consider c
dac asupra unei construcii nu intervin sarcini continue i crescnde, aceasta se poate considera stabilizat
dup o perioad de cinci ani de la darea ei n exploatare.
a b
Fig. 6.1 Reperi de control tip I.N.C.E.R.C. montai pe construcii n Romnia
a Corpul mrcii sau reperului; b Capac cu bulon sferic al mrcii sau reperului
Ca reper ncastrat n construcie se poate folosi reperul de oel sub form de tije avnd un cap
semisferic executat din metal dur, inoxidabil i pe care se poate aeza cu uurin mira sau prisma
optic. Aceste tije se fixeaz cu mortar de ciment n orificiile spate n zidurile cldirilor. Pentru
conservarea strii lor iniiale i pentru evitarea ciobirii sau deteriorrii, reperii pot fi protejai prin
capace speciale de protecie.
n ara noastr, normativul elaborat de I.N.C.E.R.C. privind determinarea tasrilor
construciilor civile i industriale prin metode topografice C.61-64, recomand ca reperi de control
montai n pereii construciilor stabile, modelul de reper prezentat n figura 6.1.
Reperii de control fixai pe sol sunt de dou tipuri:
- reperi de suprafa;
- reperi de adncime.
Reperii de control de suprafa se construiesc sub forma unor borne de beton armat avnd
form de trunchi de piramid, cu baza ptrat. Borna de beton armat se sprijin pe o talp, de
asemenea din beton armat cu care se leag prin intermediul unei armturi metalice.
n figurile urmtoare sunt prezentate cteva tipuri de reper de control de suprafa utilizai la
studiul comportrii construciilor n Germania, Cehia, Ungaria i Romnia.
Rumegus impregnat cu bitum
Argila
Borna de beton armat
Pamnt batatorit
Put din beton armat
Talpa din beton armat
Fig. 6.2.a. Reper de control de suprafa Romnia
Dac reperul nu este montat n roc masiv ci pe pietri sau pe teren moale, talpa lui trebuie s
se afle la o adncime de cel puin 2,50 m (adncime care este variabil n funcie i de adncimea de
nghe specific zonei respective). Borna de beton armat care poart reperul (pastil semisferic) pe
care se aeaz ulterior mira sau prisma topografic, se protejeaz mpotriva deplasrilor de teren prin
intermediul puului de beton armat prevzut la partea superioar cu un capac metalic de protecie.
n cazul n care se dorete a se amplasa un reper de genul celui prezentat n figura 6.3 se vor
lua n calcul doi indici importani: nivelul apei freatice specific zonei respective i adncimea de
nghe.
Capac hidraulic
Capac din otel
Canal evacuare apa
Pamnt batatorit
Borna din beton armat
Figura 6.2.b. Reperi de control de suprafa Cehia, Ungaria
Fig. 6.3 Reper de control de suprafa n Romnia
Aceste borne de beton n care se nglobeaz reperele de control de suprafa au seciunea
ptrat, cu latura ntre 20 40 cm; captul de jos al bornei va fi aezat la o adncime de minimum 1,50
m de la suprafaa terenului. Reperii de suprafa se nglobeaz n poziie vertical.
n cazul pmnturilor macroporice sau cu contracii mari, borna de beton va fi plantat la o
adncime de minim 2 m, iar n jurul bornei se va crea o movil de pmnt cu raza de 1-1,5 m pentru
scurgerea apelor meteorice.
Drept repere de control se admit i reperele nivelmentului de precizie de stat de ordin superior,
reperi de cmp i reperi de zidrie.
Reperul de cmp se compune din dou pri distincte (figura 6.4):
- reperul propriu zis (borna);
- marca, adic piesa care se monteaz la partea superioar n born i care susine mira sau
prisma optic;
Aceti reperi se acoper cu pmnt pentru a fi protejai i numai cnd se aeaz mira pe el se
degajeaz de pmnt, la finalizarea msurtorilor acesta acoperindu-se din nou pentru conservare.
B A
25
marca
684
N
I
V
E
LME
N
T
Adncimea maxima
de nghet
Fig. 6.4 Reperi de cmp n Romnia
Reperul de zidrie se ncastreaz n zidria construciilor masive, care nu mai prezint tasri.
Acetia se ncastreaz cu baza lor n zidrie ntr-o gaur spat i umplut cu mortar de ciment de
calitate superioar.
Fig. 6.5 Reperi de nivelment de zidrie n Romnia
n cazul pmnturilor moi sau a existenei unor straturi moi n adncime, sau cnd adncimea
straturilor de pmnt macroporic depete 2 m, este necesar s se foloseasc repere de adncime.
Reperii de control de adncime sunt realizai ntr-o diversitate de tipuri i care ajung la cteva zeci de
metri adncime. Adaptnd tehnologia de executare a cestor tipuri de reperi, se pot obine rezultate
foarte bune pentru observaiile topografice, datorit deplasrilor sau variaiilor foarte reduse ale
acestora. n funcie de locul amplasamentului, stabilitatea terenului de fundare i condiiile geotehnice
locale se poate afirma c aceti reperi, ofer sigurana c nu se vor deplasa n timp i se pot utiliza
muli ani de la data materializrii efective pe teren.
Bucsa sferica din metal
Teava suspendata cardanic
Greutate paralelipipedica
Capacprotector etans
Teava port reper 250-300mm
Teava perforata umpluta
mortar debeton
Placa debeton
Camin devizitaredin caramida
cu capavprotector
Strat izolator
Suruburi defixare
Fig. 6.6 Reper de adncime tip Muraviev
n Romnia, normativul I.N.C.E.R.C. prevede construirea reperilor de control de adncime,
conform figurii de mai jos:
Dop din lemn
de stejar
Cap de batere
Teava neagra L=1000
Mufa M2
Pivotul reperului
Tija port
reperului 20
Capac cu ncuietori
Capacul reperului
Tub metalic de protectie
Umplutura
Pamnt natural
Fig. 6.7 Reperi de adncime tip I.N.C.E.R.C. poziia de batere i poziie definitiv
6.1.1.2 Materializarea mrcilor de control sau a punctelor de pe obiectul
examinat
Materializarea punctelor de nivelment marcate pe obiectivul supus observaiilor, se realizeaz
prin intermediul mrcilor de tasare. Mrcile montate pe construciile urmrite pot avea forme
diferite, fiind confecionate din bare metalice cu cap rotunjit, sau din corniere cu cap semirotund
(figura 6.8).
Bila de otel
Sudura
Otel 16-20mm
Fig. 6.8 Mrci de nivelment ncastrare n construcie
Forma i materialul mrcilor se alege n funcie de condiiile locale, de forma i materialul
construciei urmrite. Montarea mrcilor se face astfel nct ele s fie fixe i s permit aezarea
vertical sigur a mirelor de nivelment sau a prismelor optice.
Mrcile de tasare se monteaz pe plcile de fundaie, pe soclul fundaiei, pe pereii exteriori sau
uneori n interiorul construciilor. Aceste mrci trebuie protejate mpotriva distrugerii i aceasta se face cu o
aprtoare adecvat i un capac din oel sau beton.
Pentru msurarea deplasrilor verticale (tasrilor) ale straturilor de pmnt situate la diferite
adncimi (cazul barajelor de pmnt) se folosesc reperi de adncime (mrci de adncime). Construcia
acestor reperi mrci trebuie s asigure o legtur bun ntre ele i stratul de pmnt examinat astfel
nct toate micrile verticale ale acestui strat s poat fi transmise fr deformri, mrcii. Una din
principalele pri ale, marcii de adncime, este eava de protecie care trebuie s izoleze tija reperului
de influenele unor eventuale frecri de pmnt. n consecin marc va fi supus influenelor
exercitate doar de micrile acelui strat de pmnt pe care se sprijin piciorul acesteia.
Aceast marc reper a fost conceput i exeperimentat de Lazzarini la transmiterea
deplasrilor verticale ale unui strat de pmnt situat la circa 1,5 m adncime.
Forma plat a piciorului permite construirea acestei mrci direct pe teren, n groapa deschis,
care dup priza terenului se umple cu pmnt. Deplasarea stratului de sub picior poate fi sesizat la
nivelul mrcii la partea superioar a acesteia. Neajunsul acestui tip de marc este acela c odat cu
construcia acesteia terenul este deranjat iar unele deplasri ale acesteia pot s apar datorit refacerii
echilibrului natural.
C ap ac p ro tector
Mar ca rep erul ui (o t el )
B ol t de fier
C ut ie d e pr ot ecti e din lemn
T eava d in fier u mpluta
cu b eton
I zo l a t i e termica
R adi er din beton
Fig. 6.9 Marc de adncime de tip Lazzarini
Mrcile de acest tip sau similare cu acestea, pot fi folosite pentru determinarea tasrilor
straturilor de pmnt situate la diferite adncimi, ceea ce se practic la studierea barajelor de pmnt.
6.1.2 Utilizarea metodei nivelmentului geometric de nalt precizie la
determinarea deplasrilor verticale a construciilor
Este metoda care asigur precizia cea mai mare la msurarea deplasrilor verticale ale
construciilor, fiind utilizat att la ncercarea experimental a unor construcii pe modele sau la scar
natural, precum i la urmrirea comportrii n timp, i n faza de exploatare. n funcie de tipul, forma
i mrimea construciei studiate, se creeaz configuraia reelei de nivelment geometric.
n componena reelei regsim urmtoarele tipuri de puncte:
mrci sau puncte de control fixate pe construcia care este supus studiului, numite n cazul
acestei metode i mrci de tasare sau repere mobile;
reper fixe, numite i repere de referin, amplasate n terenuri nedeformabile i n afara zonei
de influen a construciei studiate.
Mrcile de tasare (punctele de control) au rolul de a reda ct mai fidel componentele
verticale ale deplasrilor unor elemente distincte, sau a construciei care se taseaz, pe care acestea
sunt fixate. Ele se ncastreaz n elementele de rezisten ale construciei i trebuie s asigure
verticalizarea pe acestea a mirelor de nivelment sau susinerea dispozitivelor de nivelment hidrostatic.
Mrcile de tasare determinate prin nivelment geometric de nalt precizie se pot realiza astfel:
ncastrate vertical;
ncastrate orizontal;
ncastrate orizontal sau vertical monobloc;
ncastrate vertical sau orizontal cu bol detaabil.
n afar de acestea se mai pot folosi i alte modaliti de materializare a punctelor de control
(mrci de tasare) cum ar fi: mrci gradate, reprezentate de mire de invar suspendate sau rigle obinuite
cu diviziuni milimetrice, mrci bulon, mrci cui, mrci pastil.
Repererii fici au rolul de a realiza un plan de comparaie fa de care se determin
deplasrile verticale ale punctelor de control. La amplasarea lor trebuie s se in seama de condiiile
geotehnice i hidrologice ale terenului, de necesitatea asigurrii condiiilor optime pentru efectuarea
citirilor pe mire, de elementele de organizare a antierului, de sistematizarea terenului n jurul
construciei studiate. Numrul reperelor fixe va fi de minim dou, dispuse astfel nct s acopere ct
mai uniform zona nconjurtoare a construciei.
Ca regul general, reperele fixe se amplaseaz n afara zonei de influen a construciei
observate sub adncimea de nghe i pn la roca de baz, sau sunt ncastrate n construcii vechi
existente, masive i stabile sau n stnc, n locuri accesibile pentru observaii. Amplasamentul
acestora trebuie s asigure conservarea lor pe toat perioada studiului.
Procesul de determinare a deplasrilor verticale ale punctelor de control (mrci de tasare)
cuprinde urmtoarele etape:
etapa msurtorilor de nivelment la locul experimentrii, n laborator sau pe teren, pentru
fiecare ciclu de msurtori;
etapa prelucrrii msurtorilor pentru calculul deplasrilor verticale ale construciei i
evaluarea preciziei, care include:
testarea stabilitii reperilor fici ai reelei de referin n raport cu care se efectueaz
msurarea deplasrilor verticale ale construciei; dac se constat c uni din reperii fici
i-au modificat poziia pe vertical, se vor introduce coreciile corespunztoare;
calculul deplasrilor verticale ale punctelor de control de pe construcia luat n studiu;
evaluarea preciziei de determinare a deplasrilor verticale i stabilirea, pentru o
probabilitate dat a intervalelor de ncredere n care se ncadreaz;
ntocmirea documentaiei tehnice a cercetrii.
6.1.2.1 Proiectarea reelelor de nivelment geometric pentru determinarea
tasrilor
6.1.2.1.1 Repartiia spaial a reperilor de control
Proiectarea reelelor de nivelment geometric pentru cazuri speciale se face prin luarea n
considerare a unui numr minim de reperi de control pe baza crora se vor raporta ulterior toate
ciclurile de msurtori efectuate.
Numrul minim al reperilor de control ntr-o reea de nivelment geometric pentru urmrirea
tasrilor unei construcii, nu poate fi mai mic de 3, acest lucru rezultnd din faptul c un numr mai
mic de reperi de control, de exemplu 2, nu este suficient pentru a putea calcula i reprezenta care
dintre acetia i-a modificat poziia iniial (n cazul n care apare o diferen ntre cotele absolute ale
acestora).
Reperii de control trebuie s fie situai reciproc n aa fel nct stabilitatea fiecruia dintre ei s
poat fi apreciat cu ajutorul cel puin a unei drumuiri, care duce ctre un alt reper de control. n
consecin, numrul staiilor din fiecare drumuire trebuie s asigure posibilitatea de a aprecia
stabilitatea fiecrui reper de control n limitele adoptate ale influenei erorilor de msurat, adic trebuie
s permit constatarea deplasrilor care n valoare absolut depesc valorile erorilor de msurare.
Pentru determinarea deplasrilor reperilor de control se pornete de la relaia privind criteriul
de stabilitate al unui reper de nivelment (diferenele de nivel s nu depeasc valoarea n 2 ):
n d 2
max
= 6.1
n care: - eroarea medie ptratic a unitii de pondere, eroare specific msurtorilor de precizii
diferite;
m- eroarea de msurare.
Rezult urmtoarea condiie:
2
2
m
n 6.2
Dac considerm eroarea medie ptratic a unitii de pondere egal 0,1 mm i eroarea de
msurare egal cu 0,5 mm, constatm c depistarea modificrii reciproce a poziiei a doi reperi de
control, de ordinul a 0,5 mm, va fi posibil numai cnd . 6 n
Din aceast condiie rezult c reelele de nivelment geometric alungite, drumuirile pe
coronamentele barajelor, drumuirile nivelitice paralele cu axul podurilor care nu au reperi de control la
mijloc, trebuie s fie legate la fiecare capt, cel puin cu 3 repere de control, amplasate n afara zonei
de deformabilitate a terenului.
Pentru stabilirea distanei maxime ntre reperele de control, ct i a lungimii maxime a
drumuirii nivelitice, se consider aceast lungime exprimat prin numrul de staii. Trebuie avut n
vedere c eroarea medie ptratic de deplasare pe vertical, adaptat n prealabil pentru reperul
amplasat cel mai defavorabil s nu fie depit.
Se consider o drumuire nivelitic cu un numr total de reperi n. Primul i ultimul reper se
consider ca reperi de control, iar celelalte puncte se consider a fi reperi mobili.
2 2
n-1
2
n+1
n-1
s s s s s s
h
1 1
h
2
n-1
h
n+1
h
2
h
n-1
directia de parcurgere
a traseului drumuirii
n
1
Fig. 6.10 Drumuire de nivelment geometric
Admind pentru simplificarea calculului n impar, precum i numrul de staii s din figura
6.10 pe diferite poriuni ale drumuirii, se poate scrie urmtoarea egalitate:
( ) ( ) ( ) = + + +
+ +
+ +
+ + + + + +
+ +
1 1
1 1 1 1 3 3
2 2 1 1
...
2 2 2 2 2 2
...
n n
n n n n n n
v h
v h v h v h
v h v h 6.3
( ) ( ) ( )
1 1
1 1 1 1 3 3
2 2 1 1
' ' ...
2
'
2
'
2
'
2
'
2
'
2
'
... ' ' ' '
+ +
+ + +
+ +
+ +
+ + + + + + =
n n
n n n n n n
v h
v h v h v h
v h v h
Exemplificarea de calcul are n vedere un model constituit dintr-o poriune de reea de nivelment
sub forma unei drumuiri sprijinite la capete pe doi reperi de control, notai cu A, respectiv B, care sunt
considerai fici. Valorile luate n calcul sunt ale diferenelor de nivel msurate pe teren ntre punctele
drumuirii, din dou cicluri de msurtori.
A
B
M
1'
2'
M
1
M
M
2
h
1
h
1
1
h'
h'
1
1
h
2
h'
2
h
2
2
h'
2
h'
3
3
h
3
h'
h
3
h=h'
Fig. 6.11 Reea de nivelment sub form de drumuire sprijinit la capete
n figur s-au folosit urmtoarele notaii:
- A i B reperi de control fici;
- M
1
i M
2
mrcile de tasare de pe construcie n poziia iniial (ciclul I);
- M
1
i M
2
- mrcile de tasare de pe construcie n poziia actual (ciclul II);
- h
1
, h
2
, h
3
diferenele de nivel deduse din observaiile iniiale (ciclul I);
- h
1
, h
2
, h
3
- diferenele de nivel deduse din observaiile actuale (ciclul II);
- v
1
, v
2
, v
3
coreciile diferenelor de nivel msurate iniial;
- v
1
, v
2
, v
3
coreciile diferenelor de nivel msurate actual;
-
1
,
2
deplasrile verticale (tasrile) mrcilor 1 i 2 n intervalul dintre cele dou cicluri
de msurtori.
Se consider pentru nceput eliminarea valorilor h
3
i h
3
i se raporteaz deplasrile mrcilor 1
i 2 numai la un singur reper de contro A, se obine:
'
2
'
1 2 2 1
'
1 1 1
h h h h
h h
+ = + +
= +
6.4
Rezult:
( ) ( ) ( )
2
'
2 1 2 1
'
2
'
1 2
1
'
1 1
h h h h h h
h h
+ = + + =
=
6.5
Generaliznd relaia se poate scrie:
i i i
h h + =
'
1 1
6.6
Msurnd diferenele de nivel h
3
i h
3
drumuirea se leag i de reperul B, crend astfel o
condiie geometric.
Dac se iau n considerare coreciile v i v ce se aplic msurtorilor conform modelului
propus n figur, se poate scrie egalitatea ntre diferenele de nivel msurate iniial i actual:
'
3
'
3
'
2
'
2
'
1
'
1 3 3 2 2 1 1
v h v h v h v h v h v h + + + + + = + + + + + 6.7
Aceast relaie conduce la urmtoarea ecuaie de condiie, cea a coreciilor:
0
'
3 3
'
2 2
'
1 1
= + + + w v v v v v v 6.8
n ecuaia de mai sus w care reprezint termenul liber se exprim sub forma:
( )
=
'
1
h h w
i
6.9
Dac cele dou puncte reper formeaz o reea alctuit din dou drumuiri de nivelment
sprijinite la capete pe aceleai dou reperi de control A i B i notnd cu M
1
, M
2
... M
i
mrcile de
tasare de pe obiectivul examinat, iar cu h
1
, h
2
... h
7
diferenele de nivel msurate n ciclul I se pot scrie
urmtoarele ecuaii caracteristice:
'
3
'
3
'
2
'
2
'
1
'
1 3 3 2 2 1 1
v h v h v h v h v h v h + + + + + = + + + + + 6.10
'
7
'
7
'
6
'
6
'
5
'
5
'
4
'
4 7 7 6 6 5 5 4 4
v h v h v h v h v h v h v h v h + + + + + + + = + + + + + + + 6.11
n ecuaiile de mai sus, se observ c trebuie s avem suma diferenelor de nivel de pe
drumuirea AM
1
M
2
B egal cu suma diferenelor de nivel de pe drumuirea AM
3
M
4
M
5
B. Astfel, se pune
condiia de nchidere a drumuirilor de nivelment conform relaiilor urmtoare:
7 7 6 6 5 5 4 4 3 3 2 2 1 1
v h v h v h v h v h v h v h + + + + + + + = + + + + + 6.12
'
7
'
7
'
6
'
6
'
5
'
5
'
4
'
4
'
3
'
3
'
2
'
2
'
1
'
1
v h v h v h v h v h v h v h + + + + + + + = + + + + + 6.13
A
3
M
M
4
5
M
M
1
M
2
1
h
B
2
h
3
h
4
h
5
h
6
h
7
h
Fig. 6.12 Reea de nivelment cu dou drumuiri sprijinite la capete
Se poate observa c ultima ecuaie reprezint o combinaie liniar a celorlalte trei ecuaii
precedente. n consecin, la compensarea reelei trebuie s se ia n considerare oricare trei din cele
patru ecuaii scrise mai sus.
Cele dou drumuiri de nivelment geometric AM
1
M
2
B i AM
3
M
4
M
5
B genereaz fiecare cte o
ecuaie de condiie. Identitatea punctelor de sprijin ale acestor dou drumuiri are drept consecin
scrierea unei ecuaii suplimentare de nchidere a drumuirilor de nivelment.
Pe baza analizrii modelului propus n cele dou figuri prezentate, innd cont de tipul reelei
de sprijin, respectiv, drumuire de nivelment geometric, se poate determina i stabili numrul de ecuaii
de condiie independente.
Astfel, n drumuirea de nivelment din AM
1
M
2
B, deplasarea mrcii M
1
poate fi determinat pe
baza msurrii de dou ori a unei singure diferene de nivel h
1
adic h
1
i h
1
, iar deplasrile mrcilor
M
1
i M
2
pe baza msurtorii de dou ori a dou diferene de nivel h
1
i h
2
.
Msurarea iniial i actual a diferenelor de nivel h
3
creeaz i ea o ecuaie de condiie.
n aceleai condiii se pune problema i pentru drumuirea AM
3
M
4
M
5
B, msurarea de dou ori a
diferenei de nivel h
7
genereaz o ecuaie de condiie.
Combinnd situaiile de mai sus, rezult c n drumuirile nivelitice izolate, adic n drumuirile
care se sprijin la ambele capete pe reperi de control, numrul ecuaiilor de condiie independente este
dat de:
M D N = 6.14
n care: D numrul diferenelor de nivel msurate de dou ori;
M numrul mrcilor mobile.
Aceast formul poate fi verificat n urmtoarea reea sub forma unei drumuiri de nivelment
format din 3 reperi A, B i C pentru care se pot scrie urmtoarele ecuaii:
A
B
C
M
1
2
M 3
M
4
M
5
M
1
h
2
h
h
3
4
h
9
h
h
5
h
6
h
7
h
8
Fig. 6.13 Reea de nivelment cu 3 reperi de sprijin
4 4 3 3 2 2 1 1 4 4 3 3 2 2 1 1
' ' ' ' ' ' ' ' v h v h v h v h v h v h v h v h + + + + + + + = + + + + + + + 5.15
7 7 6 6 5 5 4 4 7 7 6 6 5 5 4 4
' ' ' ' ' ' ' ' v h v h v h v h v h v h v h v h + + + + + + = + + + + + +
7 7 6 6 5 5 3 3
3 3 2 2 1 1 7 7 6 6 5 5 3 3 2 2 1 1
' ' ' ' ' ' ' '
' ' ' ' ' '
v h v h v h v h
v h v h v h v h v h v h v h v h v h
+ + + + + + + +
+ + + + + + = + + + + + + + + + + +
Se poate observa c suma primelor dou ecuaii este egal cu ecuaia a treia , prin urmare nu
exist dect dou ecuaii independente. Acelai rezultat se obine dac se aplic relaia de mai sus n
cazul n care D=7 i M=5. Existena liniilor de nchidere a drumuirilor marcate punctat, adic
drumuiri nivelitice nchise pe punctul de plecare, creeaz posibilitatea scrierii unei condiii
suplimentare i deci numrul ecuaiilor independente n reea se determin cu relaia:
I M D N + = 6.16
n care: I reprezint numrul nchiderilor.
Relaia de mai sus se poate verifica tot n reeaua din figura 6.13 completat cu drumuirile
suplimentare care formeaz nchideri (linii ntrerupte).
Astfel, se poate scrie: D=9; M=5; I=2, rezult N=6.
Ecuaiile caracteristice care se scriu pe baza reelei nivelitice din figura 6.13 sunt:
8 8 2 2 1 1 8 8 2 2 1 1
' ' ' ' ' ' . 1 v h v h v h v h v h v h + + + + + = + + + + +
4 4 9 9 1 1 4 4 9 9 1 1
' ' ' ' ' ' . 2 v h v h v h v h v h v h + + + + + = + + + + +
0 . 3
9 9 3 3 2 2
= + + + v h v h v h
0 ' ' ' ' ' ' . 4
9 9 3 3 2 2
= + + + v h v h v h
0 . 5
8 8 7 7 6 6 5 5 3 3
= + + + + + + + v h v h v h v h v h
0 ' ' ' ' ' ' ' ' ' ' . 6
8 8 7 7 6 6 5 5 3 3
= + + + + + + + v h v h v h v h v h
4 4 3 3 2 2 1 1 4 4 3 3 2 2 1 1
' ' ' ' ' ' ' ' . 7 v h v h v h v h v h v h v h v h + + + + + + + = + + + + + + + 6.17
7 7 6 6 5 5 9 9 1 1 7 7 6 6 5 5 9 9 1 1
' ' ' ' ' ' ' ' ' ' . 8 v h v h v h v h v h v h v h v h v h v h + + + + + + + + + = + + + + + + + + +
7 7 6 6 5 5 3 3 2 2 1 1
7 7 6 6 5 5 3 3 2 2 1 1
' ' ' ' ' ' ' ' ' ' ' '
. 9
v h v h v h v h v h v h
v h v h v h v h v h v h
+ + + + + + + + + + + =
+ + + + + + + + + + +
4 4 3 3 8 8 4 4 3 3 8 8
' ' ' ' ' ' . 10 v h v h v h v h v h v h + + + + = + + + +
7 7 6 6 5 5 4 4 7 7 6 6 5 5 4 4
' ' ' ' ' ' ' ' . 11 v h v h v h v h v h v h v h v h + + + + + + = + + + + + +
0 . 12
9 9 5 5 6 6 7 7 8 8 2 2
= + + + v h v h v h v h v h v h
0 ' ' ' ' ' ' ' ' ' ' ' ' . 13
9 9 5 5 6 6 7 7 8 8 2 2
= + + + v h v h v h v h v h v h
Din ecuaiile 6.17, primele 6 sunt independente, celelalte provenind din combinaiile primelor
6. Alegnd din egalitile de mai sus, oricare 6 ecuaii independente le putem transforma n 6 ecuaii
de condiie independente ale coreciilor.
Din primele 6 ecuaii independente se obine urmtorul sistem liniar de ecuaii de condiie ale
coreciilor:
0 ' ' ' ' ' '
8 8 8 8 2 2 2 2 1 1 1 1
= + + +
a
w v a v a v a v a v a v a
0 ' ' ' ' ' '
9 9 9 9 4 4 4 4 1 1 1 1
= + + +
b
w v b v b v b v b v b v b
0
9 9 3 3 2 2
= + +
c
w v c v c v c 6.18
0 ' ' ' ' ' '
9 9 3 3 2 2
= + +
d
w v d v d v d
0
8 8 7 7 6 6 5 5 3 3
= + + + +
e
w v e v e v e v e v e
0 ' ' ' ' ' ' ' ' ' '
8 8 7 7 6 6 5 5 3 3
= + + + +
f
w v f v f v f v f v f
Coeficienii coreciilor v vor avea valoare +1 sau 1, iar termenii liberi w se vor determina ca
diferene dup cum urmeaz:
( ) ( )
8 2 1 8 2 1
' ' ' h h h h h h w
a
+ + + + =
( ) ( )
9 4 1 9 4 1
' ' ' h h h h h h w
b
+ + + + =
( ) ( )
9 3 2 9 3 2
' ' ' h h h h h h w
c
+ + + + = 19
( ) ( )
9 3 2 9 3 2
' ' ' h h h h h h w
d
+ + + + =
( ) ( )
8 7 6 5 3 8 7 6 5 3
' ' ' ' ' h h h h h h h h h h w
e
+ + + + + + + + =
( ) ( )
8 7 6 5 3 8 7 6 5 3
' ' ' ' ' h h h h h h h h h h w
f
+ + + + + + + + =
Pe baza coeficienilor ecuaiilor de condiie ale coreciilor se poate scrie sistemul de ecuaii
normale ale corelatelor, lund n considerare ponderile diferenelor de nivel msurate:
0 ...
6 2 1
= +
+ +
a
w K
p
af
K
p
ab
K
p
aa
0 ...
6 2 1
= +
+ +
b
w K
p
bf
K
p
bb
K
p
ab
0 ...
6 2 1
= +
+ +
c
w K
p
cf
K
p
bc
K
p
ac
0 ...
6 2 1
= +
+ +
d
w K
p
df
K
p
bd
K
p
ad
6.20
0 ...
6 2 1
= +
+ +
e
w K
p
ef
K
p
be
K
p
ae
0 ...
6 2 1
= +
+ +
f
w K
p
ff
K
p
bf
K
p
af
Dup determinarea corelatelor K se pot calcula coreciile pentru diferenele de nivel msurate
iniial i actual cu relaiile urmtoare:
6 2 1
... K
p
f
K
p
b
K
p
a
v
i
i
i
i
i
i
i
+ + + =
6 2 1
'
'
...
'
'
'
'
' K
p
f
K
p
b
K
p
a
v
i
i
i
i
i
i
i
+ + + = 6.21
Prin aplicarea acestor corecii la diferenele de nivel msurate se determin valorile definitive
ale acestora. Cunoscnd valorile compensate ale diferenelor de nivel dintre ciclul de referin i ciclul
actual al msurtorilor, se calculeaz apoi deplasrile verticale (tasrile) ale mrcilor, calcul care se
poate realiza pe mai multe ci, lund ca baz pentru control diferite reperi stabili.
1. ( ) ( )
2 2 1 1
'
2
'
2
'
1
'
1 2
v h v h v h v h M + + + + + + =
2. ( ) ( )
3 3 4 4
'
2
'
3
'
4
'
4 2
v h v h v h v h M = 6.22
3. ( ) ( )
8 8
'
8
'
8 2
v h v h M =
4. ( ) ( )
3 3 9 9 1 1
'
3
'
3
'
9
'
9
'
1
'
1 2
v h v h v h v h v h v h M + + + + + + =
Mrimile h i h sunt diferenele de nivel din prima msurtoare i respectiv a dou
msurtoare, iar v i v sunt coreciile respective. De la aceast egalitate se poate trece la o ecuaie de
condiie n care coeficienii necunoscutelor a pot fi 1.
Unica soluie este: 0 = +
w K
p
aa
, n care
s
p p
1
' = = , ( ) 1 2 =
n s
p
aa
i [ ] [ ] ' h h w =
6.23
Astfel, soluia se va scrie:
( ) 0 1 2 = + w k n s 6.24
( ) 1 2
=
n s
w
k 6.25
Coreciile diferenelor de nivel din prima i a doua msurtoare vor fi reciproc egale n ce
privete valoarea absolut i va fi de forma:
( ) ( ) 1 2 1 2
1
1
= =
n
w
n s
w
s
k
p
a
v
i
i
i
6.26
( ) ( ) 1 2 1 2
1
1
'
'
'
+ =
= =
n
w
n s
w
s
k
p
a
v
i
i
i
6.27
Eroarea medie ptratic a unitii de pondere se exprim prin:
[ ] [ ]
( ) 1 2
1
' ' '
=
+
=
n s
w v v p pvv
6.28
n continuare eroarea medie ptratic a deplasrii reperului din mijlocul drumuirii dup
compensarea diferenelor de nivel respective adic va fi:
( ) ( )
+ + + + + =
=
+
2 2 2 2
...
2
1 1
'
1
'
1
1 1
'
1
,
1
1
1
n n n n n
v h v h
v h v h F 6.29
Relaia 6.29 reprezint o sum de deplasri a unei funcii i deci eroarea medie ptratic a
deplasrii reperului din mijloc:
( )
i i i i i i
v h v h F + + = ,
' '
6.30
Eroarea funciei F
1
se determin astfel:
1
1
= =
i
i
f
h
F
i 1 '
'
1
+ = =
i
i
f
h
F
6.31
Cu aceste mrimi se poate exprima eroarea funciei F
1
cu relaia:
= 1
1
p
ff
m
F
6.32
n care indicativul 1 reprezint numrul succesiv al ultimei corecii.
n mod similar se poate calcula eroarea medie ptratic a deplasrii reperului care precede pe
cel din mijloc, adic pentru reperul
2
1 n
:
( ) ( )
+ + + + + =
=
2 2 2 2
...
2
3 3
'
3
'
3
1 1
'
1
,
1
1
2
n n n n n
v h v h
v h v h F 6.33
1
2
= =
i
i
h
F
i 1 '
'
2
+ = =
i
i
h
F
6.34
Cu aceste mrimi se poate exprima eroarea funciei F
2
cu relaia:
( ) ( )
( ) 1 2
1 3
2
+
=
n
n n s
m
F
6.35
Se poate constata c se obine o mrime identic, calculnd deplasarea reperului
2
1 n
pornind de la nchiderea drumuirii nivelitice, n sens invers, adic:
( ) ( )
+ + + + + =
2
'
2
'
2 2
... ' '
1 1 1 1
1 1 1 1 2
n n n n
n n n n
v h v h
v h v h F 5.36
Dac se efectueaz pe un obiect concret calculele pentru aflarea valorilor
2 1
, ,
F F
m m , se constat
pe baza presupunerii c eroarea medie ptratic cea mai mare o va avea punctul din mijlocul drumuirii i c
erorile n deplasrile reperilor vecini difer foarte puin ntre ele. Deoarece eroarea depinde ntr-o
drumuire separat de mrimea wa termenului liber, n formula lui
1
F
m , este eroarea medie mijlocie a
observaiei.
Rezult astfel:
( )
mm mm
M
n s
=
2
1
6.37
n care
M reprezint eroarea medie ptratic cea mai mare, admisibil a deplasrii reperului, iar
( ) 1 n s nseamn numrul staiilor instrumentului n drumuire.
Se obine urmtoarea relaie:
( )
2
2
2 1
M
n s 6.38
n ceea ce privete lungimea drumuirii de nivelment, diferena de nivel ntre capetele acesteia
este o sum algebric a diferenelor de nivel de pe niveleuri:
n
h h h H + + + = ...
2 1
6.39
Diferenele de nivel pariale sunt nsoite de erori m
h
; n cazul n care lungimile porteelor sunt
egale, atunci i valorile erorilor vor fi egale. Fiind vorba de o funcie de mrimi msurate direct, se
aplic relaia de calcul n funcie de derivatele pariale:
1 =
i
h
f
i 1
2
=
i
h
f
6.40
adic, se poate scrie egalitatea:
1 ... 1 1
2 2 2 2
2
+ + + =
n i
h h h H
m m m m
n m m
h H
=
2 2
6.41
n m m
h H
=
n care: m
h
reprezint eroarea unitar pe niveleu, iar n este numrul niveleurilor.
Astfel, la proiectarea drumuirilor de nivelment geometric, pentru urmrirea comportrii n
timp a construciilor, lungimea niveleurilor este preferabil a nu depi 60 m, iar numrul de niveleuri
maxime admisibil s fie 18, fapt ceea ce conduce la limitarea lungimii drumuirilor nivelitice de
precizie la maxim 1000 m.
6.1.2.1.2 Stabilirea poziiei mrcilor pe obiectivul supus observaiilor
periodice
Locurile de amplasare a mrcilor de tasare se aleg n conformitate cu dispoziiile acelor
instituii pentru care obiectivul examinat constituie obiectul cercetrilor tehnico-tiinifice. n general,
mrcile se fixeaz pe diferite blocuri ale construciei separate de rosturile de dilatare pe postamentele
destinate aezrii mainilor, pe stlpii construciilor, pe soclurile courilor industriale, pe plcile de
fundaie, pe coronamentele barajelor, pe vetrele galeriilor de control ale barajelor, pe platformele
halelor industriale, pe culeele i pilele podurilor.
Numrul mrcilor de tasare trebuie s asigure sesizarea caracterului deplasrilor i deformaiilor
construciei studiate. n mod orientativ trebuie artat c pentru observarea deplasrilor blocurilor
construciilor trebuie s se fixeze cel puin dou mrci, fiecare la distana de circa 1 m de rostul de dilataie
sau patru mrci pentru blocurile mai late. Acelai numr de mrci de tasare se fixeaz pe suprafeele
superioare ale pilelor podurilor de cale ferat sau rutiere. Pe zidurile cu lungimi mari se fixeaz mrci de
tasare n aa fel ca distana ntre acestea s fie cuprinse ntre 20 i 40 m.
6.1.2.1.3 Amplasarea reperilor i a mrcilor de nivelment pentru diferite
tipuri de construcii
n cazul unui baraj de greutate modul de amplasare a mrcilor i a reperilor poate fi
reprezentat schematic n figura 6.14:
R
1
R
2
3
R
4
R
5
R
6
R
1
M
2
M
3
M
4
M
5
M
6
M
7
M
8
M
M
9
10
M
2
N
N
1
N
3
4
N
7
R
8
R
Fig. 6.14 Dispunerea drumuirilor de nivelment geometric la un baraj arcuit
n figura 6.15 este prezentat un exemplu de poziionare a reperilor de control i a mrcilor de
tasare, n vederea executrii msurtorilor tasrilor infrastructurii de pod.
Reperii de sprijin de nivelment se amplaseaz n afara zonelor cu potenial ridicat de
deformabilitate. Reperii de sprijin (control) se amplaseaz n numr de minim 3-4 pe fiecare mal al
cursului de ap, astfel nct stabilitatea lor s poat fi controlat reciproc.
M
1(14)
M
2(13) 6(9)
M
7(10)
M
3
M
M
4 5
M
M
1
M
2
M
14 13
M
M
6
M
7
M
9
M
8
M
3
M
4
M
5
M
12
M
11
M
12
Axa longitudinal a
CALEA PODULUI
M
1
Marci de tasare pe culee
M
12
Marci de tasare pe suprastructura
Fig. 6.15 Modul de repartiie a mrcilor de tasare pe culei i pe suprastructura podului
Dup cum se poate observa n figurile urmtoare, distana de la reper la mrcile de tasare este
egal (fapt stabilit pentru a evita erorile de focusare a lunetei instrumentului).
C
A
L
E
F
E
R
A
T
A
C
A
L
E
F
E
R
A
T
A
C
A
L
E
F
E
R
A
T
A
C
A
L
E
F
E
R
A
T
A
1
M
2
M
M
4
M
5
M
3
M
18
M
19
22
M
21
M
M
20
M
6
7
M
16
M
M
17
M
8
9
M
M
10
M
11
M
12
M
13
M
14
M
15
Fig. 6.16 Modul de amplasare a mrcilor de tasare pe suporii unui pasaj superior
7 M M 6
9 M
8 M
M 1 1 1 0 M 1 2 M
C A L E A P O D U L U I
A x a l o n g i t u d i n a l a
3 M M 1 2 M 4 M
M 8 7 M 6 M 5 M
Fig. 6.17 Modul de amplasare a mrcilor de tasare la diferite nivele ale suporilor
Atunci cnd constrngerile de proiectare impun asigurarea egalitii lungimii vizelor, se pot
aeza broate (borne confecionate din metal sau plastic cu coeficient de deformabilitate redus)
stabile de nivelment n puncte intermediare notate cu litera b. n acest fel, broasca de nivelment se
leag de drumuirea principal de nivelment printr-o drumuire nivelitic scurt fa de reperul cel mai
apropiat.
n figurile de mai jos se propune un model de repartiie spaial a patru reperi de sprijin de
plecare notai cu R
1
, R
2
, R
3
i R
4
a ase mrci de tasare M
1
, M
2
, ... M
6
i a sistemului de drumuiri cu
opt staii stabile, din care se fac observaiile pentru tasarea infrastructurii unui pod cu o singur
deschidere.
n figurile 6.18.a i 6.18.b se prezint modelul de reea de nivelment cu patru reperi de plecare R
1
, R
2
,
R
3
i R
4
, cu 14 mrci de tasare M
1
, M
2
, ... M
14
pentru msurarea tasrilor unui pod cu dou deschideri.
Legtura reperilor de plecare de pe ambele maluri ale cursului de ap, se realizeaz prin trei poligoane
de nivelment amplasate innd seama de egalitatea distanelor aparat la mir sau reflector.
CALEA PODULUI
Axa longitudinala
9
M
10
M
12
M
11
M
6
M
5
M
2
M
1
M
St.2
R
2
St.7
St.1
4
M M
3
M
8 7
M
1
R
St.4
St.4
St.3
3
R
St.8
St.10
4
R
St.12
St.11
St.13
Fig. 6.18. a Schema drumuirilor de nivelment pod cu o singur deschidere
3
M
1
M
4
M
2
M
Axa longitudinala
CALEAPODULUI
St.13
St.12
St.11
R
4
St.8
St.10
R
3
7
M 8
M
St.3
St.4
M
6
St.7
14 13 12
11 10 9
St.4
1
R
St.1
5
2
R
St.2
M
M M M
M M M
Fig. 6.18 b Reeaua drumuirilor de nivelment pentru un pod cu dou deschideri
6.1.2.2 Erorile ntlnite n cazul msurrii deplasrilor prin nivelment
geometric
A. Neorizontalitatea liniei de vizare a lunetei instrumentului
Eroarea datorit neorizontalizrii liniei de vizare a instrumentului topografic (nivel
topografic sau dup caz, teodolit clasic sau electronic), are n aparen un caracter ntmpltor, dar n
cazul msurtorilor ea poate avea i un caracter sistematic.
Eroarea se poate elimina prin rectificarea aparatului sau prin staionarea cu nivela
topografic la mijlocul niveleului unui traseu de nivelment geometric.
Orice metod de rectificare a nivelei se realizeaz ns cu o eroare rezidual dat prin relaia
urmtoare:
cc
m
= 09 , 0 6.42
La o sensibilitate a a nivelei
cc
10 = eroarea de rectificare va fi egal cu
cc
3 , 0 .
Aceast eroare produce la rndul su o eroare n determinarea diferenei de nivel care se
determin cu relaia:
cc
h
m d
m
6.43
Astfel, la o eroare de rectificare a axei de vizare
cc
m 3 , 0 =
rezult o valoare de
. 10 / 015 , 0 m mm Influena acestei erori reziduale de rectificare asupra diferenei de nivel msurate
poate fi redus prin scurtarea vizei i prin staionarea la mijlocul niveleului.
B. Neaplicarea coreciei de sfericitate, refracie i temperatur
La msurarea tasrilor construciilor supuse observrii, apar cazuri cnd nu putem menine
aceeai distan pentru viza nainte i napoi. Dac, n aceast situaie nu se aplic corecia de
sfericitate i refracie, diferenele de nivel msurate vor fi eronate cu o anumit cantitate.
n acest sens, la o diferen de lungime de vizare egal cu 1 m, ntre viza nainte i napoi,
diferena indus de corecia de sfericitate i refracie va fi de 0,003mm/10 m.
Mrimea erorii provocate de refracie crete cu ptratul lungimii de vizare i proporional cu
diferena de nivel. La vizrile deasupra terenului la altitudini mai mici de 50 cm, crete foarte repede
gradientul de temperatur i prin aceasta i eroarea provocat de refracie. Refracia maxim apare n
timpul rsritului i apusului de soare. Pentru a evita erorile de refracie, este recomandat ca
nivelmentul s nu se execute pe timp foarte cald i nu cu o or nainte de rsritul soarelui nici cu o or
nainte de apusul soarelui. Refracia depinde i de suprafaa terenului, ea fiind mai mare dac terenul
este acoperit cu asfalt, beton, piatr i este mai mic dac este acoperit cu iarb. De asemenea,
mrimea refraciei este influenat de suprafaa apei care prezint variaii de temperatur fa de aer.
Diminuarea acestei erori de msurare i posibila eliminare a acesteia se poate realiza prin
egalizarea distanelor citite nainte i napoi.
Pe lng erorile datorate sfericitii i refraciei, instrumentele i mirele de nivelment sunt
supuse n timpul msurrii tasrilor unor variaii importante de temperatur care provoac deformaii
ale prilor constructive ale acestora.
n aceast direcie trebuie menionate variaiile de temperatur din apropierea instalaiilor
mecanice din interiorul i exteriorul construciei observate, umiditatea aerului, curenii de aer reci i
calzi. De asemenea, la msurarea tasrilor construciilor apar trepidaii de la maini sau utilaje, de
multe ori existnd posibilitatea de a executa msurtori n locuri cu praf sau fum.
La msurtorile executate n scopuri obinuite de nivelement, pe teren se ntlnesc de obicei
temperaturi care variaz lent i care dau astfel posibilitatea instrumentului s se aclimatizeze. Acest
lucru nu este posibil n lucrrile cu caracter special, deci i n cazul urmririi comportrii
construciilor, deoarece n acest situaie sunt cazuri de variaii mari de temperatur, cnd aparatul este
nclzit neuniform.
n vecintatea instalaiilor mecanice, erorile pot fi i mai mari. Variaia de temperatur
produce i erori n citirea pe mir, care se pot calcula cu relaia:
t t t
m k l m
= 6.44
n care: k
t
coeficientul liniar de dilataie termic a mirei;
m
t
diferena de temperatur la vizarea nainte i napoi;
l un sector pe mir.
Pentru a evita asemenea erori se recomand ca n special acolo unde variaiile de temperatur
sunt foarte mari s se foloseasc instrumente de nivelment automate cu influene minore datorate
temperaturii, instrumente fr nivel toric.
C. Neverticalitatea mirei i excentricitatea benzii de invar fa de axa
reperului
Erorile proprii ale mirelor de nivelment pot fi reduse rectificnd mirele i proiectnd astfel
drumuirea nct prin metoda de msurare a diferenelor de nivel s se elimine efectul acestor cauze.
Neverticalitatea mirei produce erori destul de mari n determinarea diferenelor de nivel.
n cazul nclinrii mirei cu un unghi , banda de invar a acesteia nu se gsete peste punctul
cel mai nalt conform figurii 6.19, astfel c n loc de valoarea l
0
se va citi valoarea l, mai mare.
Acestei citiri este necesar a i se aplica o corecie:
'
0
l l l = + 6.45
Plan de vizare
l
l
l'
0
e
Fig. 6.19 Determinarea coreciei de excentricitate a benzii de invar
De unde rezult n continuare:
( )
2
sin 2
cos 1
cos
2
0
'
0
l l
l l
l l l
l l l
l l l
=
=
=
=
=
6.46
Aceasta este corecia care trebuie adugat citirii l de pe mir.
Valoarea erorii de neverticalitate crete i mai mult atunci cnd mira este aezat excentric
fa de reper. n acest caz este valabil urmtoarea ecuaie:
1
2
2 2
1 e
l 6.47
Primul termen din parantez nu depinde de punctul pe care aezm mira, influena lui este
unilateral i proporional cu nlimea axei de vizare.
Al doilea termen din parantez depinde de valorile e
1
i , dar depinde i de nlimea de
vizare i are n general un caracter ntmpltor. Valoarea acestui termen este mai mare ca a primului i
poate s aib un efect unilateral dac nivela sferic de pe mir este aezat prea sus, astfel nct
operatorul de la mir nu vede perpendicular bula nivelei i produce o eroare de centrare n reper
(figura 6.20).
e
s t i c l a
Fig. 6.20 Excentricitate datorat neperpendicularitii razei vizuale
n timpul verticalizrii mirei cu ajutorul nivelei sferice se poate induce o eroare de 2 10
cc
.
Mirele Zeiss sunt nzestrate la nivelul tlpii cu un inel care permite centrarea benzii de invar cu
exactitate pe axa reperului. Cu toate aceste msuri (mirele de invar avnd dou scale pe care se
realizeaz citirea), citirile nu pot fi totui considerate n axa mirei. Eroarea provocat de aceast
abatere poate s ajung la valori de . 05 , 0 mm
La o lungime a porteelor mai mare de 50 m, precizia nivelmentului este mai mare, iar vizrile mai
scurte, mai puin precise dect nivelmentul cu mir cu dou scale.
6.1.3 Metoda nivelmentului trigonometric de precizie
Metoda nivelmentului trigonometric de precizie se folosete la msurarea deplasrilor
verticale (tasri sau ridicri) ale punctelor de control de pe construciile studiate i n special a
punctelor ndeprtate i greu accesibile ale construciilor nalte.
Pe baza experimentrilor n condiii de laborator i de teren, s-a demonstrat c nivelmentul
trigonometric de precizie cu vize scurte, cu lungimi de pn la 100 m, permite obinerea unei precizii
comparabile cu cea a nivelmentului geometric.
Astfel, n condiii de laborator s-a demonstrat obinerea diferenei de nivel cu o eroare medie
ptratic
mm m
h
1 , 0 =
. Pe baza msurtorilor de teren pentru distana de 80 m, diferena de nivel s-
a determinat cu o eroare de
mm m
h
2 , 0 =
.
Principiul metodei nivelmentului trigonometric de precizie const n determinarea cotelor
punctelor de control dup care, deplasrile verticale se obin din diferenele cotelor din ciclul actual i
al corespondentelor din ciclul iniial.
Msurarea unghiurilor orizontale i verticale (zenitale) trebuie fcut cu teodolite cu precizie
de citire unghiular de
cc cc
5 , 0 , 1
. Msurarea unghiurilor zenitale trebuie efectuat n perioada de
stabilitate a refraciei atmosferice, datorit faptului c n momentele de maxim al refraciei atmosferice
(miezul zilei), calitatea imaginii este sczut survenind astfel i erorile de focusare a imaginii lunetei
instrumentului.
Pentru distanele mici, de pn la 100 m, corecia total datorit efectului de curbur a
pmntului i de refracie atmosferic este foarte mic. n cazul determinrii deplasrilor verticale ale
construciilor, prin nivelment trigonometric de precizie, influena curburii pmntului i a refraciei
atmosferice se poate elimina aproape n ntregime, prin modul de lucru, respectiv prin diferena
msurtorilor ntre dou cicluri de observaii.
La msurarea deplasrilor verticale, mrimea unghiului zenital al fiecrei direcii este
determinat cu cte trei msurtori complete, n ambele poziii ale lunetei, astfel: fie la toate cele trei
fire zenitale (firul reticular orizontal i cele dou fire stadimetrice), fie de trei ori la firul unic zenital
(firul reticular orizontal), n funcie de forma reticulului instrumentului folosit.
Media aritmetic a valorilor rezultate din cele n msurtori reprezint valoarea probabil a
unghiului zenital msurat:
( ) [ ]
n
D S
Z
n
i
i
g
i
i
2
400
1
=
+
=
6.48
Eroarea medie ptratic a unui unghi zenital msurat este:
[ ]
1
=
n
vv
m
i
Z
6.49
Eroarea medie ptratic a unghiului zenital mediu va fi:
[ ]
( )
n
m
n n
vv
m
i
Z
Z
=
=
1
6.50
Datorit faptului c, n cazul distanelor scurte, precizia de determinare a cotelor punctelor
prin metoda nivelmentului trigonometric este ridicat, aceast metod poate fi folosit cu rezultate
bune n cazul unor studii pe modele, n special cnd msurarea deplasrilor orizontale i verticale se
face concomitent. Determinarea deplasrilor verticale din diferena cotelor punctelor obinute n ciclul
actual i ciclul iniial presupune un volum de calcul important. Determinarea deplasrilor verticale ale
construciei se face n funcie direct de diferenele unghiurilor zenitale, msurate n punctele de capt
ale unei baze fixe, cnd orizontul instrumentului se modific n fiecare ciclu de observaii.
Se consider o baz fix, fa de punctele de capt ale acesteia A i B odat cu msurarea
elementelor necesare determinrii deplasrilor orizontale se efectueaz i msurarea elementelor
necesare determinrii deplasrilor verticale ale punctului de control, marca de tasare, de pe construcia
supus observrii (figura 6.21).
A B
P
P'
P
0
R
b
H
X
Y
d
A
d
B
d1
2
d
Z'
1
1
Z
Z
1
2
Z
Z
2
Z'
2
h
1
h'
1
h
1
Fig. 6.21 Metoda nivelmentului trigonometric de precizie
n ciclul iniial, cota punctului P determinat din punctul A al bazei este dat de relaia:
H
1
=H
A
+h
1
; 6.51
n care:
H
A
- orizontul instrumentului n punctul de staie A;
h
1
- diferena de nivel dintre orizontul instrumentului din staia A i punctul de control
P;
Orizontul instrumentului din punctul de staie A, determinat de la reperul R de cot cunoscut
este dat de relaia:
A A A R A
ctgZ d S H H + = 6.52
Reperul de cot cunoscut se va stabili ct mai aproape de punctele de staie A i B, iar citirea
pe mira S
A
va fi aceeai n toate ciclurile de observaii, aleas astfel nct unghiul zenital s fie
aproximativ drept, iar orizontul locului se va determina cu formula:
cc
cc
A
g
A A R A
Z
d S H H
) 100 (
+ = 6.53
Diferena de nivel dintre orizontul instrumentului din punctul de staie A i punctul de control
P este dat de relaia:
1 1 1
ctgZ d h = 6.54
n intervalul de timp dintre ciclul iniial i ciclul actual de observaii, punctul de control s-a
deplasat pe vertical, odat cu construcia, din poziia P n poziia P. Cota punctului P
corespunztoare ciclului actual are forma:
H
1
=H
A
+h
1
; 6.55
Deplasarea vertical a punctului de control, ntre cele dou cicluri de observaii, din staia A,
este:
1 1 1 1 1 1
) ' ( ) ' ( ' h H h h H H H H H
A A A
+ = + = = 6.56
n mod asemntor, deplasarea vertical a punctului de control, determinat din staia B, are
forma:
2 2 2 2 2 2
) ' ( ) ' ( ' h H h h H H H H H
B B B
+ = + = = 6.57
n relaiile de mai sus se modific doar mrimile unghiurilor zenitale.
Diferenele dintre valorile orizonturilor instrumentului din cele dou cicluri de msurtori,
necesare la calculul deplasrii verticale a punctului de control vor fi:
( )
( )
B B B B B B
A A A A A A
ctgZ ctgZ d H H H
ctgZ ctgZ d H H H
' '
' '
= =
= =
6.58
Notnd:
A A A
Z Z Z + = ' i
B B B
Z Z Z + = ' , prin liniarizare se obin, pentru relaiile de
mai sus urmtoarele expresii:
cc
A
A
cc
A
A
Z
Z
d
H =
2
sin
cc
B
B
cc
B
B
Z
Z
d
H =
2
sin
6.59
Deplasrile verticale ale punctului de control, determinate din cele dou puncte de staie vor fi:
( )
cc
cc
cc
A
A
cc
A
A
Z
Z
b
Z
Z
d
h H H
1
1
2 2 1 1
sin sin
sin
sin
+
= + =
( )
cc
cc
cc
B
B
cc
B
B
Z
Z
b
Z
Z
d
h H H
2
2
2 2
2 2
sin sin
sin
sin
+
= + =
6.60
Ca valoare definitiv a deplasrii verticale a punctului de control se va lua media aritmetic,
2
2 1
H H
H
I
+
= 6.61
sau media ponderat a celor dou valori:
2 1
2 2 1 1
p p
H p H p
H
I
+
+
= 6.62
n care:
p
1
i p
2
reprezint ponderile deplasrilor verticale ale punctului de control, determinate din
staiile A i B, mrimi exprimate n funcie de erorile medii ptratice ale deplasrilor verticale
prin relaiile:
2
1
1
1
H
m
p
= i
2
2
2
1
H
m
p
= 6.63
Metoda prezentat ofer posibilitatea determinrii deplasrii verticale a punctelor de contro,
de pe construcia studiat, n funcie de diferenele unghiurilor zenitale msurate n dou cicluri de
observaii, pentru cazul general al variaiei orizontului instrumentului n punctele de staie,
reprezentnd o metod eficient n cazul folosirii nivelmentului trigonometric de precizie.
Eficiena metodei este cu att mai mare cu ct numrul punctelor de control, ca i
numrul ciclurilor de observaii este mai mare, proprietate remarcabil n practica ncercrii
construciilor ca i n cea a urmririi comportrii acestora n timp.
Pentru asigurarea unei anumite precizii a msurtorilor liniare i unghiulare a valorilor
observate este necesar stabilirea unor relaii matematice pe baza crora s se poat efectua o evaluare
ct mai complet a preciziei de determinare a deplasrilor verticale ale construciei.
Plecnd de la relaiile diferenelor de nivel ntre dou cicluri de msurtori realizate, erorile medii
ptratice ale deplasrilor verticale vor fi exprimate prin relaiile:
( ) ( ) ( )
( )
2 2 2 2
2
2
2
'
'
+
(
A A
A A
Z
A
A
Z
A
A
d
A
A
H
m
Z
H
m
Z
H
m
d
H
m 6.64
( ) ( ) ( )
( )
2 2 2 2
2
2
2
'
'
+
(
B B
B B
Z
B
B
Z
B
B
d
B
B
H
m
Z
H
m
Z
H
m
d
H
m 6.65
Calculndu-se derivatele pariale i introducndu-le n relaiile 6.64 i 6.65, se obine pentru erorile
medii ptratice ale diferenelor orizontului instrumentului, formulele:
A
A A
A
Z
A
A
Z
A A
A
d
A H
m
Z
H
m
Z ctg H
d
m
H m
=
2 2
2 2
2
2 2
4
6.66
B
B B
B
Z
B
B
Z
B B
B
d
B H
m
Z
H
m
Z ctg H
d
m
H m
=
2 2
2 2
2
2 2
4
6.67
Eroarea medie ptratic a valorii medii a deplasrii verticale a punctului de control n funcie
de erorile medii ptratice ale diferenelor orizontului instrumentului, va fi exprimat de relaia:
( )
( )
2
2
2
2
2
2
2
2
2
2
2
2
2
2 2
2 2
'
1
B A
B
A B A
Z
B
B
Z
A
A
Z
B B
Z
A A
B
d
B
a
d
A
H
m
Z
H
m
Z
H
m
ctgZ H
m
ctgZ H
d
m
H
d
m
H
m
6.68
Admind c H H H
B A
i
B A B A
Z Z d d d , i erorile medii ptratice ale
elementelor msurate sunt
B A B A B A
Z Z Z Z d d d
m m m m m m m
, , , va rezulta pentru eroarea
medie ptratic a valorii medii a deplasrii verticale, n funcie de erorile medii ptratice ale
diferenelor dintre orizonturile instrumentului din cele dou cicluri de observaii relaia:
2
1
2 2
2
2
2
'
1
(
(
'
'
'
=
A
A
Z
A
Z
A
d
H
m
Z
H
m
HctgZ
d
m
H m
6.69
Erorile medii ptratice ale deplasrilor verticale, mai precis ale diferenelor de nivel
determinate din cele dou puncte de staie, se exprim cu relaiile 6.70:
( ) ( ) ( ) ( ) ( )
( )
2 2
1
1
2
2
1
1
2 2
1
2 2
1 2
2
1 2 1 1
1
'
'
'
'
'
'
+
(
Z Z
b h
m
Z
h
m
Z
h
m
h m h
m
b
h
m
( ) ( ) ( ) ( ) ( )
( )
2 2
2
2
2
2
2
1
2 2
2
2 2
2 2
2
2 2 2 2
2 |
|
+
|
|
|
|
+
|
|
|
|
+
|
|
+
(
Z Z
b h
m
Z
h
m
Z
h
m
h m h
m
b
h
m
Se vor calcula mrimile derivatelor pariale i se vor introduce n relaiile de mai sus,
obinndu-se:
( ) ( ) [ ]
, 4
2
2
1
1
2
1
2 2
1
2
2 2
1
2
2
1
2
2
1
2
1
1
1
Z
Z
b
h
m
Z
h
m
Z ctg h
m
ctg ctg h
m
ctg h
b
m
h m
+
+
+ +
+ +
6.71
( ) [ ] ( )
, 4
2
2
2
2
2
2
2 2
2
2
2 2
2
2
2 2
2
2
2
2
2
2
2
2
Z
Z
b
h
m
Z
h
m
Z ctg h
m
ctg h
m
ctg ctg h
b
m
h m
+ +
+ +
6.72
Pe baza relaiilor de mai sus, se deduce c eroarea medie ptratic a valorii medii a deplasrii
verticale a unei construcii, determinat n funcie de diferenele dintre diferenele de nivel dintre
punctele de staie i punctul de control, este cu att mai mic cu ct mrimea unghiului zenital se
apropie de 100
g
, iar dreptele de determinare se intersecteaz sub un unghi ct mai apropiat de 200
g
.
6.1.3 Utilizarea nivelmentului hidrostatic n
determinarea deplasrilor construciilor masive
n anumite situaii, msurarea deplasrilor
verticale ale construciilor studiate se poate efectua prin
P
u
n
c
t
d
e
c
o
n
t
r
o
l
R
e
p
e
r
f
i
x
h
metoda nivelmentului hidrostatic. Metoda se aplic cu rezultate foarte bune n condiii speciale, n
condiii grele de lucru (locuri greu accesibile n interiorul cldirilor, la nlimi mari) unde metoda
nivelmentului geometric de nalt precizie este dificil sau uneori imposibil de aplicat.
De asemenea, prin metoda nivelmentului hidrostatic se asigur un control permanent i
continuu a stabilitii construciilor, permindu-se o automatizare a nregistrrii datelor msurate.
Fig. 6.22 Principiul nivelmentului hidrostatic
Fa de metoda nivelmentului geometric, metoda nivelmentului execuie sau exploatare,
ntmpin foarte multe greuti. De multe ori nu exist posibilitatea instalrii aparatului fr
dispozitive speciale, nu se poate realiza inerea mirei n punctele de control de pe construcia
observat, nu se poate opri procesul de producie pentru efectuarea msurtorilor. Toate aceste
inconveniente se elimin prin folosirea nivelmentului hidrostatic care se execut mult mai rapid dect
nivelmentul geometric de precizie. Aparatura folosit este de construcie simpl, este ieftin i se poate
pstra i depozita foarte uor.
Metoda nivelmentului hidrostatic este fundamentat de principiul vaselor comunicante. n
punctele de control de pe construcia studiat sunt fixate tuburi gradate, care sunt unite ntre ele printr-
un furtun. Diferena citirilor pe tuburile gradate, corespunztor nivelului apei din tuburi, reprezint
diferena de nivel dintre cele dou puncte. n sistemul hidrostatic prezint numeroase avantaje,
principalele dintre acestea fiind precizia de realizare a lucrrilor i msurarea nivelitic n acelai timp
a mai multor puncte. Determinarea diferenei de nivel prin nivelment hidrostatic, permite eliminarea
unui ntreg ir de erori ale aparatului, proprii nivelmentului geometric. La acestea trebuie adugat
faptul c, realizarea nivelmentului geometric de nalt precizie, pentru cazul studierii unor construcii
aflate n hidrostatic se mai include i un rezervor suplimentar care joac rol de compensator.
Deplasrile verticale ale diferitelor pri ale construciei se vor produce mpreun cu diferitele
dispozitive de prindere a tuburilor gradate. n timpul msurtorilor, aparatura poate fi montat fix pe
cldire sau poate fi mobil, adic poate fi deplasat n diferite puncte.
n primul caz, deoarece un tub este instalat ntr-un reper fix, deplasrile verticale ale
construciei se determin din diferena citirilor efectuate pe tubul situat n punctul de control,
corespunztor diferitelor cicluri de observaii.
n cel de-al doilea caz, determinarea deplasrilor verticale se face ca n cazul nivelmentului
geometric.
Diferena de nivel dintre tuburile gradate i legate ntre ele printr-un furtun, amplasate n
punctele A i B se calculeaz cu relaiile:
( ) ( ) ( ) ( )
1 2 1 2 1 1 2 2
c c d d c d c d h = = 6.73
n care d
1
i d
2
reprezint nlimile tuburilor gradate;
c
1
i c
2
distanele de la capetele tuburilor pn la nivelul lichidului, exprimate de citirile pe
scalele celor dou tuburi.
O relaie asemntoare se poate scrie, dac se schimb poziia tuburilor:
( ) ( )
2 1 2 2
' ' c c d d h = 6.74
n care: c
1
i c
2
noile citiri pe scalele tuburilor.
Rezolvnd concomitent cele dou relaii, se obine pentru mrimea constantei, ( )
1 2
d d k = ,
determinat de diferena nlimilor tuburilor, numit i constanta instrumentului, expresia,
( ) ( ) [ ]
1 2 1 2
' ' 5 , 0 c c c c K + = 6.75
iar pentru diferena de nivel dintre punctele A i B, relaia:
( ) ( ) [ ]
1 2 2 1
' ' 5 , 0 c c c c h + = 6.76
Cnd unul dintre puncte este un reper fix (x), de exemplu punctul B, n raport cu care se
msoar deplasrile verticale ale unui punct de control (y), de exemplu A, se vor obine mrimile
deplasrilor verticale absolute, fcndu-se diferenele:
p y k x
h h H
xy
a r
xy y
,..., 2 , 1 ; ,..., 2 , 1
0 ) (
= =
=
6.77
n care
) (a r
xy
h - diferena de nivel msurat n ciclul de referin (actual);
0
xy
h - diferena de nivel msurat n ciclul iniial.
Cnd ambele puncte sunt puncte de control, atunci se vor obine deplasrile verticale relative
ale unui punct fa de cellalt punct, procedndu-se n acelai mod ca n cazul deplasrilor absolute.
Dac sistemul hidrostatic cuprinde att tuburi n reperi fici ct i tuburi fixate n puncte de
control, atunci determinarea deplasrilor verticale ale punctelor de control se face ca n cazul drumuirii
de nivelment geometric sprijinit la capete pe reperi de cote cunoscute.
Pentru automatizarea procesului de msurare a deplasrilor verticale ale construciilor, n
fiecare tub de msurare este necesar s se fixeze dou contacte. Contactul superior se fixeaz mai sus
dect nivelul iniial al lichidului, la mrimea presupus a deplasrii, iar cel inferior se introduce n
lichid. Prin atingerea deplasrii limit la unul din tuburi, are loc lichidarea contactului, deoarece
lichidul atinge contactul superior. ntr-un asemenea sistem, se poate conecta un semnal electric sau
toate circuitele pot fi legate la un tablou de comand.
Precizia nivelmentului hidrostatic depinde de nsi construcia sistemului, de proprietile
lichidului, de metoda de msurare i de influena factorilor de mediu. Principalele surse de erori care
influeneaz msurtorile sunt:
- schimbarea cotei iniiale a nivelului lichidului din sistem ca urmare a tasrilor tuburilor de
msurare;
- schimbrile de temperatur i efectuarea citirilor pe tuburi.
Pentru msurarea deplasrilor verticale ale construciilor se folosesc dou feluri de sisteme
hidrostatice:
- sistem hidrostatic deschis la care nivelul superior al lichidului vine n contact direct cu
aerul;
- sistem hidrostatic nchis la care lichidul este izolat de atmosfer.
Dezavantajul sistemelor hidrostatice deschise este legat de evaporarea lichidului. Acestea nu
permit folosirea unor lichide uor volatile, ca de exemplu antigel, care este util a se folosi n condiii
cu temperaturi negative. Pentru asigurarea unei funcionri ndelungate i precise, prile componente
ale sistemului hidrostatic trebuie s ntruneasc anumite condiii, acestea rezultnd ca urmare a unor
perfecionri continue.
Furtunurile ce leag sistemul hidrostatic se realizeaz din diferite materiale: metal, cauciuc,
material plastic. Furtunurile sistemelor hidrostatice au lungimi cuprinse ntre 1030 m. La lungimi
mari, principalul volum de lichid se afl n aceste conducte, iar schimbarea volumului conductei de
polietilen reprezint aproximativ 5% la schimbarea temperaturii de la +5
o
la +30
o
C. n acest fel, dac
volumul de ap din rezervorul sistemului reprezint mai puin de 5% dect volumul total al lichidului
n sistem, atunci la schimbarea temperaturii apa se poate scurge total din rezervor i msurarea nu mai
este posibil, introducndu-se astfel un sistem de compensare.
n sistemele hidraulice nchise, deoarece lichidul este ferit de influena atmosferei, filtrele sunt
excluse, iar posibilitatea ptrunderii prafului i uleiului n hidrosistem este eliminat. n acest caz, este
posibil folosirea lichidelor uor volatile. Dar, fiind ermetic nchise, la schimbri de temperatur se
produc schimbri ale presiunii n hidrosistem i dac conductele de legtur sunt din polietilen subire
sau din cauciuc, atunci ntinderea lor poate duce la creterea volumului lichidului, pierderea lichidului,
scderea nivelului lichidului din tuburile gradate, dnd natere astfel la erori mari de msurare. Din
aceast cauz, la realizarea hidrosistemelor nchise, furtunurile de legtur trebuie fcute din material
rezistent sau cu seciune mic, cele mai indicate fiind cele din material metalic. Micorarea volumului
furtunurilor se poate realiza prin introducerea n sistem a sifoanelor nchise n volumul de aer, prin
care se compenseaz schimbarea presiunii ca urmare a schimbrii mari a volumului.
Metoda nivelmentului hidrostatic permite determinarea deplasrilor verticale cu o precizie
ridicat, cuprins ntre 0,01 0,005 mm i se recomand a se folosi la urmrirea comportrii n
timp a unor construcii masive (genul barajelor), la care operaia de observare se face permanent, pe
ntreaga durat a existenei n exploatare a construciei.
6.2 METODE TOPO-GEODEZICE FOLOSITE
LA DETERMINAREA DEPLASRILOR ORIZONTALE
Prin prelucrarea msurtorilor liniare i unghiulare, se va putea obine fie direct mrimea
vectorului deplasrii orizontale, fie mai nti mrimea componentelor pe axele de coordonate, apoi n
funcie de acestea, mrimea vectorului deplasrii.
Att mrimea ct i direcia i sensul vectorului deplasrii orizontale se poate determina prin
metode grafice, metode numerice (trigonometrice, analitice) i metode riguroase folosind metoda celor
mai mici ptrate, n funcie de natura i precizia cercetrii.
6.2.1 Metoda microtriangulaiei i utilizarea acesteia la determinri
ale deplasrilor
Se folosete la determinarea vectorului deplasrii orizontale ale punctelor de control, fixate pe
construcia studiat, n raport cu un sistem de referin constituit din puncte fixate n terenuri
nedeformabile i n afara zonei de influen a construciei, acestea formnd reeaua punctelor de
triangulaie.
Metoda microtriangulaiei este folosit la urmrirea comportrii n timp a construciilor masive
(baraje, ecluze, viaducte, poduri), ca i a terenurilor din jurul acestora.
Construcia reelei de microtriangulaie se realizeaz cu precizie foarte mare.
Determinarea vectorului deplasrii orizontale a construciei necesit efectuarea msurtorilor
repetate (ciclice) ale reelei de microtriangulaie, cu aceeai precizie cu care a fost construit iniial.
Calculele de compensare trebuie executate riguros, prin metoda celor mai mici ptrate, cu scopul de a
se obine valorile cele mai probabile ale coordonatelor punctelor reelei, avndu-se posibilitatea
aprecierii preciziei rezultatelor compensrii i deci i a preciziei de determinare a vectorului deplasrii
orizontale a punctelor de control de pe construcia studiat.
n componena reelei se regsesc urmtoarele categorii de puncte:
Puncte de control, numite i mrci de tasare ce sunt fixate pe construcia ce urmeaz a
fi observat. Aceste puncte au rolul de a evidenia cu exactitate mrimiea i direcia
deplasrilor. Semnalizarea lor se face cu mrci speciale de diferite forme, confecionate din
bronz cromat spre a rezista la coroziune. Cercetrile au artat c cele mai bune sunt semnalele
sub form de disc, diametrul cercului reprezentnd 1:20 din distana medie de la punctul fix
pn la punctul de determinat.
Puncte de staie, din care se fac observaii repetate spre punctele de control de pe
construcie. Aceste puncte sunt marcate prin pilatri de beton armat, cu fundaie adnc, avnd
la partea superioar piese speciale de centrare i prindere a teodolitului. Amplasarea lor se face
n apropierea construciei , la maximum 300500 m, numrul lor fiind de cel puin dou. La
partea superioar a pilastrului se fixeaz o plac de oel n mijlocul creia se afl dispus un
reper cu filet ce nlocuiete urubul pomp, pentru o mai bun centrare a teodolitului i a
semnalelor de vizare pe punctele de staie.
Punctele de referin de la care se determin eventualele schimbri n poziia punctelor
de staie sunt amplasate n terenuri stabile i la distane de 200300 m de construcia
observat, spre a se elimina orice influen a acesteia asupra lor.
Punctele de orientare sunt amplasate la distane mai mari , n terenuri care prezint un
grad ridicat al stabilitii, indicat n studiile geotehnice.
Fig. 6.23 Reea complet de urmrire
Reeaua de microtriangulaie se poate prezenta dup cum urmeaz:
reea complet, care cuprinde toate cele patru categorii de puncte i cu vize reciproce ntre
punctele de staie i punctele de referin (figura 6.23);
reea incomplet, cnd nu sunt asigurate vizele reciproce ntre punctele de staie i
punctele de referin;
reea simpl, compus din puncte de staie i puncte de referin.
La realizarea reelei de microtriangulaie se urmrete obinerea unei bune conformaii a
figurilor geometrice componente, n vederea obinerii unei precizii antecalculate care s satisfac pe
deplin cerinele impuse. Se alege un sistem rectangular de axe care s coincid cu axele principale ale
construciei observate. De exemplu n cazul urmririi unui baraj sau a unei lucrri de art (pod,
viaduct), deformaiile rezultate pe axa Y paralel cu axa obiectivului, sunt mai mici dect cele pe
vertical, adic dup axa Z.
S
C
C
C
C
B B B 1 2 3
1
2
3
4
O
O
O
1
2
3
B 6
B 5 4 B
1
S 2
S3
S 4
Y
X
Z
Fig. 6.24 Alegerea sistemului de referin pentru urmrirea unui baraj
Observaiile n punctele reelei de triangulaie se execut cu precizie corespunztoare reelei
de ordinul I, II, uneori chiar III, prin metoda seriilor complete (reiteraiilor) sau metoda Schreiber. n
timpul msurtorilor se iau toate msurile pentru a se elimina complet influena erorilor sistematice i
pentru a reduce la minimum erorile aleatoare.
Eroarea de nenchidere n turul de orizont nu trebuie s depeasc valoarea de 12
cc
. n caz
contrar msurtorile n acea staie se vor repeta.
La calculul deplasrilor orizontale ale construciei, unghiurile, orientrile i coordonatele
punctelor din ciclul iniial de msurtori devin, dup compensare, elemente de referin. Fa de
acestea se raporteaz toate elementele obinute n ciclurile urmtoare de observaii.
Schimbrile n poziia punctelor de control, de pe construcia studiat, se determin prin
metoda interseciei, pe cale trigonometric, analitic sau prin metoda celor mai mici ptrate.
n fiecare ciclu de observaii se verific stabilitatea n poziia punctelor de staie, n cazul
deplasrii unora din ele, procedndu-se la introducerea coreciilor corespunztoare.
Procesul determinrii vectorului deplasrii orizontale a punctelor de control de pe construcia
studiat, cuprinde urmtoarele etape:
etapa msurtorilor unghiulare i liniare n locul experimentrii, n laborator sau pe
teren, n fiecare ciclu de observaii i care cuprinde:
msurarea direciilor orizontale din toate punctele de staie i a distanelor;
compensarea direciilor orizontale msurate n fiecare punct de staie, prin metoda
riguroas a msurtorilor indirecte sau, n cazul unor experimentri mai puin precise, prin
metod empiric;
evaluarea preciziei msurtorilor unghiulare i liniare;
verificarea stabilitii punctelor de staie i calculul modificrilor n direciile punctelor
observate.
etapa prelucrrii msurtorilor, pentru calculul vectorului deplasrii construciei i
evaluarea preciziei, care cuprinde:
testarea stabilitii punctelor fixe n raport cu care se efectueaz msurarea vectorului
deplasrii; dac se constat c unele puncte fixe i-au modificat poziia se calculeaz
mrimea deplasrilor punctelor fixe, ca i direciile deplasrilor i se introduc coreciile
corespunztoare;
calculul vectorului deplasrii orizontale, pentru punctele de control de pe construcia
studiat;
evaluarea preciziei de determinare a vectorului deplasrii i stabilirea, pentru o
probabilitate dat, a intervalelor i domeniilor de ncredere n care se afl;
ntocmirea documentaiei tehnice.
O condiie pentru determinarea cu precizie a deplasrilor absolute ale construciilor o reprezint
stabilitatea punctelor de observaie. Punctele de observaie, respectiv staiile teodolitelor, i pot schimba
poziia datorit unui complex de cauze, cum ar fi: alunecri de terenu, tasarea pilatrilor, lovirea sau/i
distrugerea parial a acestora.
Determinarea precis a deplasrii staiilor de observaie este foarte necesar deoarece o
determinare greit a deplasrilor poate s schimbe forma deformaiilor construciei. Deplasrile
construciilor sunt n general foarte mici, situate n foarte multe cazuri la limita posibilitilor de
observaie. Determinarea acestor cantiti mici trebuie s se fac foarte precis i din aceast cauz
trebuie eliminate erorile provenite din deplasarea staiilor i msurtoare.
Determinarea deplasrilor punctelor geodezice de observaie ale construciilor se realizeaz
prin intermediul urmtoarelor metode:
o metoda microtriangulaiei prin folosirea de ansamblu a punctelor reelei, n cazul
reelelor complete i de suprafa ;
o metoda retrointerseciei folosind punctele de microtriangulaie n mod izolat, n
cazul reelelor incomplete.
6.2.1.1 Determinarea deplasrilor orizontale ale punctelor de staie
n reelele incomplete
Dup proiecia pe planul de situaie a amplasamentului construciei, a punctelor de staie, de
control i de orientare, se procedeaz la executarea observaiilor unghiulare i liniare. Compensnd
aceste observaii prin metoda celor mai mici ptrate, se calculeaz n final coordonatele punctelor fixe
n sistemul de proiecie local al amplasamentului.
La intervale de timp stabilite, se repet msurtorile n reea obinndu-se aceleai rezultate
sau alte valori unghiulare i liniare datorit eventualelor deplasri ale punctelor de staie. Aceast
problem se va trata lund n consideraie variaia direciilor i admind stabilitatea punctelor de
control.
Se consider o poriune dintr-o reea de microtriangulaie, conform figurii 6.25 n care se fac notaiile:
S, S
1
, S
2
, S
3
poziiile iniiale ale punctelor reelei;
S, S
1
, S
2
, S
3
poziiile actuale (poziii deplasate ale punctelor reelei);
K
1
, K
2
, K
3
direciile observate la msurtoarea iniial din staia de observaiei S;
K
1
, K
2
, K
3
direciile observate la msurtoarea actual din staia S.
S S'
S
1
2
S
3
S
1
S'
2
S'
S'
3
1
d
K
1
K
2
d
2
K'
1
1
1
2
K'
2
2
K
3
d
2
3
K'
3
3
Fig. 6.25 Deplasarea punctelor de staie prin observarea direciilor
Deplasrile diferitelor puncte ale reelei, aprute ntre msurtoarea iniial i cea actual
provoac o variaie a direciilor i deci a unghiurilor orizontale definite de acestea. Diferenele ntre
unghiuri, depind de mrimea deplasrilor punctelor din reea i de erorile obinute la msurarea iniial
i cea actual. Pe baza acestor diferene se vor putea determina componentele cele mai probabile ale
deplasrilor punctelor de referin. Pe baza notaiilor fcute se pot scrie urmtoarele condiii de
egalitate, pentru staia de observaie S:
( ) ( ) ( ) ( )
1 1
'
1
'
1 2 2
'
2
'
2 1 1 2 2
+ + + + + + = + + v K v K v K v K
6.78
( ) ( ) ( ) ( )
2 2
'
1
'
1 3 3
'
3
'
3 1 1 3 3
+ + + + + + = + + v K v K v K v K
6.79
n care: v coreciile pentru direciile msurate iniial din staia de observaie S;
v coreciile pentru direciile msurate actual din staia de observaie deplasat S.
n ecuaiile 6.78 i 6.79 se poate observa o component comun, aa numita necunoscut de
orientare a staiei de observaie S:
( ) ( )
1 1
'
1
'
1 1 1
+ + + + = v K v K dz
S
6.80
( ) ( )
2 2
'
2
'
2 2 2
+ + + + = v K v K dz
S
6.81
innd cont de notaiile de mai sus, se scriu ecuaiile 6.78 i 6.79 se pot scrie astfel:
( )
( )
( ) 0
0
0
'
3 3 3 3
'
3 3
'
2 2 2 2
'
2 2
'
1 1 1 1
'
1 1
= +
= +
= +
K K dz v v
K K dz v v
K K dz v v
S
S
S
6.82
Coreciile
i
sunt cauzate de deplasrile punctelor de vizare S
i
, iar coreciile
i
sunt cauzate de
deplasarea punctului de staie S. Aceste variaii ale orientrii unei direcii
,
provocate de variaia
coordonatelor capetelor sale sunt evideniate prin relaii de tipul:
S
SS
cc
SS
cc
SS
S
SS
cc
S
SS
cc
SS
y
d d
y
d
x
d
+ =
=
1 1
1 1
1 1
1
1
1
1
1
1
cos sin
cos sin
6.83
n care.
1
SS
orientarea direciei SS
1
d
1
lungimea laturii definit de punctele S i S
1
calculat din coordonatele obinute iniial.
Raporturile
1
1
sin
d
SS
cc
i
1
1
cos
d
SS
cc
reprezint coeficienii de direcie dintre S i S
notai cu
1
SS
a
i
1
SS
b
. Introducnd aceste mrimi n ecuaiile coreciilor se obine pentru direcia
considerat SS
1
i pentru celelalte, observate de dou ori, urmtoarele ecuaii de condiie:
0
1
'
1 1
1 1 1 1 1 1
= + + + l y b x a y b x a dz v v
S SS S SS S SS S SS S
0
2
'
2 2
2 2 2 2 2 2
= + + + l y b x a y b x a dz v v
S SS S SS S SS S SS S
6.84
0
3
'
3 3
3 3 3 3 3 3
= + + + l y b x a y b x a dz v v
S SS S SS S SS S SS S
n care:
( )
'
i i i
K K l =
- termenul liber.
Pe baza acestor relaii se pot scrie sisteme de ecuaii pentru fiecare punct de staie din reeaua
de microtriangulaie din care direciile au fost observate de dou ori: odat din poziia iniial i a doua
oar din poziia deplasat a punctului de staie.
n ceea ce privete termenii liberi ai ecuaiilor de condiii se pot face urmtoarele precizri:
admind stabilitatea punctelor de control, iar punctele de staie ca puncte noi,
algoritmul se situeaz n cazul msurtorilor indirecte cnd o reea de triangulaie este
constituit din puncte noi i puncte vechi;
aplicndu-se n acest caz metoda variaiei coordonatelor se pot calcula termenii liberi
ca diferene ntre unghiul de orientare corespunztor direciei respective i unghiul
mediu de orientare al staiei;
cunoscnd orientrile direciilor, calculate la compensarea triangulaiei prin observaii
condiionate, cnd s-au obinut coordonatele punctelor i avnd direciile msurate n
ciclul actual se poate determina valoarea unghiului s de orientare provizorie pentru
fiecare direcie.
Calculnd termenii liberi trebuie avut n vedere faptul c mrimea acestora depinde de
valoarea direciei actuale, n funcie de diferena dintre valoarea iniial i valoarea actual. Pentru ca
valoarea termenilor liberi s fie ct mai mic, este recomandabil ca direciile actuale s fie msurate cu
aceeai origine ca la msurarea iniial, n acest fel diferenele ntre direciile actuale i cele iniiale
reprezint erorile de msurare efective.
Prin orice metod se calculeaz termenii liberi, mrimea acestora nu influeneaz valorile
deplasrilor
x
i
y
care se determin, ci vor fi evideniai cnd se vor scrie ecuaiile de reducie n
care va apare un alt termen liber transformat sub forma:
=
n
l
l L
i
i i
6.85
Prin rezolvarea ecuaiilor coreciilor v i v, se pot determina necunoscutele
x
i
y
pentru
fiecare punct de staie. Ecuaiile coreciilor se pot scrie ntr-o form general de tipul:
0
'
= + + + + +
i i i i i i i
l u d z c y b x a v v
6.86
Considernd o staie din care se msoar 5 direcii se poate scrie un sistem de cinci ecuaii de
condiie cu patru necunoscute:
0
1 1 1 1 1
'
1 1
= + + + + + l u d z c y b x a v v
0
2 2 2 2 2
'
2 2
= + + + + + l u d z c y b x a v v
0
3 3 3 3 3
'
3 3
= + + + + + l u d z c y b x a v v
6.87
0
4 4 4 4 4
'
4 4
= + + + + + l u d z c y b x a v v
0
5 5 5 5 5
'
5 5
= + + + + + l u d z c y b x a v v
n fiecare ecuaie sunt patru necunoscute (direcia variaz la ambele capete) i n plus apar i
coreciile v, caz n care rezolvarea sistemul presupune compensarea prin metoda msurtorilor
condiionate.
Pentru rezolvarea sistemului prin procedeul corelatelor, cazul msurtorilor de precizii
diferite, se pornete de la condiia ca suma ptratelor coreciilor s fie minim.
[ ] [ ] ( ) ( )= + + + + + + + = +
2
' ' '
2
'
2
'
1
'
1
2 2
2 2
2
1 1
... ... ' ' '
2 2
n n n n
v p v p v p v p v p v p v v p pvv
minim 6.88
Prin nmulirea ecuaiilor sistemului de corecii cu valorile corelatelor aferente necunoscutelor
se va obine o funcie special Gauss-Lagrange
care conine ponderile msurtorilor iniiale i
actuale, avnd urmtoarea form:
( ) + + + + + =
2
5 5
2
4 4
2
3 3
2
2 2
2
1 1
v p v p v p v p v p ( ) + + + +
2
5 5
2
4 4
2
3 3
2
2 2
2
1 1
' ' ' ' ' ' ' ' ' ' v p v p v p v p v p
( ) ( ) + + + + + + + + + +
2 2 2 2 2 2 2 2 1 1 1 1 1 1 1 1
' 2 ' 2 l u d z c y b x a v v K l u d z c y b x a v v K
6.89
( ) ( )
( )
5 5 5 5 5 5 5 5
4 4 4 4 4 4 4 4 3 3 3 3 3 3 3 3
' 2
' 2 ' 2
l u d z c y b x a v v K
l u d z c y b x a v v K l u d z c y b x a v v K
+ + + + +
+ + + + + + + + + +
innd cont de principiul celor mai mici ptrate, expresiei de mai sus i se va pune condiia de
minim, astfel nct se vor scrie derivatele pariale de ordinul I ale funciei
n raport cu toate
coreciile i necunoscutele, derivate care vor fi egalate cu zero condiia ca o funcie de n variabile s
admit extreme.
Derivatele pariale ale funciei
n raport cu coreciile v sunt:
0 2 2
1 1 1
1
= =
K v p
v
, de unde rezult
1
1
1
p
K
v =
0 2 2
2 2 2
2
= =
K v p
v
, de unde rezult
2
2
2
p
K
v =
0 2 2
3 3 3
3
= =
K v p
v
, de unde rezult
3
3
3
p
K
v =
6.90
0 2 2
4 4 4
4
= =
K v p
v
, de unde rezult
4
4
4
p
K
v =
0 2 2
5 5 5
5
= =
K v p
v
, de unde rezult
5
5
5
p
K
v =
Derivatele pariale ale funciei
n raport cu coreciile v sunt prezentate n relaiile 6.91.
0 2 ' ' 2
'
1 1 1
1
= + =
K v p
v
, de unde rezult
1
1
1
'
'
p
K
v =
0 2 ' ' 2
'
2 2 2
2
= + =
K v p
v
, de unde rezult
2
2
2
'
'
p
K
v =
0 2 ' ' 2
'
3 3 3
3
= + =
K v p
v
, de unde rezult
3
3
3
'
'
p
K
v =
6.91
0 2 ' ' 2
'
4 4 4
4
= + =
K v p
v
, de unde rezult
4
4
4
'
'
p
K
v =
0 2 ' ' 2
'
5 5 5
5
= + =
K v p
v
, de unde rezult
5
5
5
'
'
p
K
v =
Rezult:
1
1
1 1
1
1
1
1
1
1 1
'
1 1
'
'
pl
K
p p
K
p
K
p
K
v v =
+ = + =
2
2
2 2
2
2
2
2
2
2 2
'
1 1
'
'
pl
K
p p
K
p
K
p
K
v v =
+ = + =
3
3
3 3
3
3
3
3
3
3 3
'
1 1
'
'
pl
K
p p
K
p
K
p
K
v v =
+ = + =
6.92
4
4
4 4
4
4
4
4
4
4 4
'
1 1
'
'
pl
K
p p
K
p
K
p
K
v v =
+ = + =
5
5
5 5
5
5
5
5
5
5 5
'
1 1
'
'
pl
K
p p
K
p
K
p
K
v v =
+ = + =
Ponderile din sistem se vor calcula ca raport ntre eroarea medie ptratic a unitii de pondere i
eroarea medie ptratic a unei direcii msurate, conform relaiei 6.93:
2
2
0
2
2
0
'
' ,
i
i
i
i
p p
= =
6.93
n care:
0
- eroarea medie ptratic a unitii de pondere =
cc
1
;
i
- eroarea medie ptratic a unei direcii msurate n ciclul iniial;
i
'
- eroarea medie ptratic a unei direcii msurate n ciclul actual;
nlocuind ponderile cu expresiile de mai sus se pot exprima coreciile v i v:
2
0
2 '
1
1
2
0
2
'
' ,
i
i
i i
i
i
i
i
K
p
K
v K
p
K
v = = = =
6.94
Mrimile corelatelor
5 4 3 2 1
, , , , K K K K K
introduse drept coeficieni nedeterminai n
problema variaional, apar n ecuaiile urmtoare ca noi necunoscute i formeaz sistemul corelatelor:
0
1 1 1 1 1
1
1
= + + + + + l u d z c y b x a
pl
K
( )
1 1 1 1 1 1 1
l u d z c y b x a pl K + + + + =
0
2 2 2 2 2
2
2
= + + + + + l u d z c y b x a
pl
K
( )
2 2 2 2 2 2 2
l u d z c y b x a pl K + + + + =
0
3 3 3 3 3
3
3
= + + + + + l u d z c y b x a
pl
K
( )
3 3 3 3 3 3 3
l u d z c y b x a pl K + + + + =
6.95
0
4 4 4 4 4
4
4
= + + + + + l u d z c y b x a
pl
K
( )
4 4 4 4 4 4 4
l u d z c y b x a pl K + + + + =
0
5 5 5 5 5
5
5
= + + + + + l u d z c y b x a
pl
K
( )
5 5 5 5 5 5 5
l u d z c y b x a pl K + + + + =
Derivatele pariale ale funciei
n raport cu necunoscutele x, y, z, u sunt:
0 2 2 2 2 2
5 5 4 4 3 3 2 2 1 1
= =
K a K a K a K a K a
x
0 2 2 2 2 2
5 5 4 4 3 3 2 2 1 1
= =
K b K b K b K b K b
y
0 2 2 2 2 2
5 5 4 4 3 3 2 2 1 1
= =
K c K c K c K c K c
z
6.96
0 2 2 2 2 2
5 5 4 4 3 3 2 2 1 1
= =
K d K d K d K d K d
x
Se substituie corelatele
5 4 3 2 1
, , , , K K K K K
ntre cele dou sisteme, valorile necunoscutelor se vor
scrie sub forma sumelor Gauss cu ponderile aferente alturi de valoarea termenului liber i se obine sistemul
ecuaiilor normale cu necunoscutele x, y, z, u:
[ ] [ ] [ ] [ ] [ ] 0 = + + + + al p u ad p z ac p y ab p x aa p
l l l l l
[ ] [ ] [ ] [ ] [ ] 0 = + + + + bl p u bd p z bc p y bb p x ab p
l l l l l
[ ] [ ] [ ] [ ] [ ] 0 = + + + + cl p u cd p z cc p y bc p x ac p
l l l l l
6.97
[ ] [ ] [ ] [ ] [ ] 0 = + + + + dl p u dd p z cd p y bd p x ad p
l l l l l
Sistemul normal se rezolv prin metoda lui Gauss-Doolittle, obinndu-se valorile
necunoscutelor cu ajutorul crora se poate exprima mrimea deplasrii punctului de staie ntre ciclul
iniial i ciclul actual.
Pentru evaluarea preciziei determinrilor se va calcula eroarea medie ptratic a unitii de
pondere pe baza compensrii efectuate. Eroarea medie ptratic a unitii de pondere dup compensare
trebuie s aib o valoare considerat ca cea mai apropiat de eroarea medie ptratic introdus n
compensare cu o abatere de
cc
1
.
Eroarea medie ptratic a unitii de pondere calculat dup compensare este:
[ ] [ ]
+
=
n r
n r
v v p pvv
comp
7071 , 0
1
' ' '
0
6.98
n care: r numrul elementelor observate de dou ori numrul ecuaiilor de condiie;
n numrul necunoscutelor determinate;
p i p mrimile ponderilor observaiilor introduse dup compensare.
Erorile individuale ale necunoscutelor se calculeaz prin intermediul coeficienilor de pondere
Q
ii
i eroarea medie ptratic a unitii de pondere dup compensare astfel:
ii
comp
i
Q m
0
=
6.99
Problema deplasrii punctelor de staie se poate rezolva i pe baza observrii unghiurilor
orizontale. n acest sens deplasarea punctului de staie din poziia iniial S n poziia actual S va fi
evideniat prin valorile unghiurilor orizontale iniiale i actuale asupra crora se aplic coreciile
aferente ciclurilor de msurtori.
Se consider un punct de staie S definit n poziia iniial i poziia S, deplasat, n ciclul
urmtor de msurtori (figura 6.26).
2
3
S
S'
3
S3
S
S1
S2
S'
S2
2
S'
1
S'
1
S
S2
2
S
S3
S1
S1
1
'
'
2
Fig. 6.26 Determinarea deplasrilor punctelor de staie prin observarea unghiurilor
Corespunztor figurii 6.26 se pot scrie urmtoarele notaii:
2 1
,
- unghiurile msurate iniial (ciclul de referin);
2 1
' , '
- unghiurile msurate actual (ciclul actual);
3 2 1
, ,
S S S
- coreciile pentru laturile unghiurilor actuale datorit deplasrilor punctelor
3 2 1
, , S S S
;
3 2 1
, ,
S S S
coreciile pentru laturile unghiurilor actuale datorit deplasrii punctului S;
2 1
,
v v
- coreciile pentru msurarea ale unghiurilor iniiale;
2 1
' '
,
v v
- coreciile pentru msurare ale unghiurilor actuale;
ntre unghiurile i coreciile definite se pot scrie urmtoarele relaii:
( ) ( )
1 1 2 2 1 1
' '
1 1 S S S S
v v
+ + + + = +
( ) ( )
2 2 3 3 2 2
' '
2 2 S S S S
v v
+ + + + = +
6.100
Cantitile din paranteze reprezint coreciile ce trebuie adugate la laturile unghiurilor actuale
pentru a le aduce la paralelism cu laturile unghiurilor iniiale. Aceste cantiti se pot scrie astfel:
( ) ( )
1
1 1 2 2
d
S S S S
= + +
- eroarea unghiului
1
( ) ( )
2
2 2 3 3
d
S S S S
= + +
- eroarea unghiului
2
6.101
Considernd unghiurile ca diferena direciilor vecine, iar coreciile de msurare ale
unghiurilor ca diferene de corecii pentru laturi se vor scrie ecuaiile coeficienilor aferente
deplasrilor
x
i
y
conform urmtorului algoritm:
2 3 ' 2 3 2
2 3 2 3 2
1 2 ' 1 2 1
1 2 1 2 1
' ' ' ' '
' ' ' ' '
2
2
1
1
v v v K K
v v v K K
v v v K K
v v v K K
= =
= =
= =
= =
6.102
Ecuaiile vor fi:
( ) ( ) [ ]
( ) ( ) [ ]
1
1 1 1 1 1 1
2 2 2 2 2 2
d y b x a y b x a
y b x a y b x a
S SS S SS S SS S SS
S SS S SS S SS S SS
= + +
+ +
( ) ( ) [ ]
( ) ( ) [ ]
2
2 2 21 2 2 2
3 3 3 3 3 3
d y b x a y b x a
y b x a y b x a
S SS S SS S SS S SS
S SS S SS S SS S SS
= + +
+ +
6.103
Aceste relaii se completeaz cu valorile coreciilor, cu satisfacerea condiiei ca suma tuturor
coeficienilor deplasrilor
x
i
y
alturi de coreciile v i v s fie zero, rezultnd ecuaia 6.104:
( ) ( ) 0 '
1
2 3 1 2 2 2 2 2 1 1 1 1 1 1
= + + +
S SS SS S SS SS S SS S SS S SS S SS
y b b x a a y b x a y b x a v v
( ) ( ) 0 '
2
2 3 2 3 3 3 32 3 2 2 2 2 2 2
= + + +
S SS SS S SS SS S SS S SS S SS S SS
y b b x a a y b x a y b x a v v
n care:
i i i
' =
i i
b a ,
- coeficieni de direcie;
y x,
deplasrile punctelor de staie.
Notnd corecia de msurare a diferenei de nivel ntre ciclul iniial i cel actual cu
( )
i i i
v v v
' =
se obine relaia 6.105:
( ) ( )
1
2 3 1 2 2 2 2 2 2 2 1 1 1
+ + + =
S SS SS S SS SS S SS S SS S SS S SS
y b b x a a y b x a x b x a v
( ) ( )
2 2
2 3 2 3 3 3 3 3 2 2 1 2
+ + + =
S SS SS S SS SS S SS S SS S SS S SS
y b b x a a y b x a x b x a v
Prin rezolvarea sistemului utiliznd schema Gauss-Doolittle extins vor rezult valorile
deplasrilor
x
i
y
, iar evaluarea preciziei determinrilor efectuate va ine cont de coeficienii de
pondere calculai n coloanele schemei Gauss-Doolittle.
6.2.1.2 Modul de determinare a deplasrilor orizontale ale punctelor de staie n reelele
incomplete
Aplicarea metodei retrointerseciei pentru obinerea deplasrilor punctelor de staie, se face n
cazul reelelor incomplete lund n consideraie variaia direciilor i admind stabilitatea punctelor de
control. Deplasarea staiei de observaie S n poziia S n perioada dintre dou cicluri de msurtori va
atrage dup sine modificarea direciilor unghiulare, respectiv a unghiurilor orizontale definite de
direciile msurate.
Pentru a determina deplasarea staiei de observaie, se admite direcia axei x n mod arbitrar, dar de
preferin de-a lungul primei vize de la msurtoarea iniial. Pe baza relaiei de calcul pentru o
direcie oarecare observat iniial din staia S i actual din staia S i care merge spre unul din
punctele de control stabilite se poate scrie urmtoarea ecuaie:
0 ' = +
i S i S i S i i
l y b x a dz v v
6.106
Aceste ecuaii, egal cu numrul direciilor de control observate de dou ori din staia de
observaie respectiv, folosesc la ntocmirea ecuaiilor normale. Avnd n vedere c exist trei
necunoscute
( )
S S S
y x dz , ,
, numrul ecuaiilor normale va fi egal cu trei:
[ ] [ ] [ ] [ ] 0 = + + l p y b p x a p dz p
l S l S l S l
[ ] [ ] [ ] [ ] 0 = + + al p y ab p x aa p dz a p
l S l S l S l
6.107
[ ] [ ] [ ] [ ] 0 = + + bl p y bb p x ab p dz b p
l S l S l S l
Exprimnd necunoscuta de orientare a staiei
S
dz
n funcie de componentele deplasrii, din
prima ecuaie a sistemului de mai sus se obine:
[ ]
[ ] [ ] [ ] { } l p y b p x a p
p
dz
l S l S l
l
S
+ =
1
6.108
Substituind aceast valoare n celelalte dou ecuaii ale sistemului avem:
[ ]
[ ]
[ ]
[ ]
[ ]
[ ]
[ ]
[ ] [ ] [ ] 0 = + +
+ al p y ab p x aa p
p
l p
y
p
b p
x
p
a p
a p
l S l S l
l
l
S
l
l
S
l
l
l
[ ]
[ ]
[ ]
[ ]
[ ]
[ ]
[ ]
[ ] [ ] [ ] 0 = + +
+ bl p y bb p x ab p
p
l p
y
p
b p
x
p
a p
b p
l S l S l
l
l
S
l
l
S
l
l
l
6.109
S
S'
C
1
C
2
3
C
4
C
K
1
1
K' 2
K
K'
2
K
3
K'
3
4
K
K'
4
x
y
x
Fig. 6.27 Determinarea deplasrilor punctelor de staie prin metoda retrointerseciei
sau:
[ ]
[ ]
[ ]
[ ]
[ ] [ ]
[ ]
[ ]
[ ] [ ]
[ ]
0
2
=
l
l l
l S
l
l l
l S
l
l
l
p
l p a p
al p y
p
b p a p
ab p x
p
a p
aa p
[ ]
[ ] [ ]
[ ]
[ ]
[ ]
[ ]
[ ]
[ ] [ ]
[ ]
0
2
=
l
l l
l S
l
l
l S
l
l l
l
p
l p b p
bl p y
p
b p
bb p x
p
b p a p
ab p
6.110
Notnd,
[ ]
[ ]
l
l
i i
p
a p
a A =
[ ]
[ ]
l
l
i i
p
b p
b B =
[ ]
[ ]
l
l
i i
p
l p
l =
6.111
rezult:
[ ] [ ] [ ]
[ ] [ ] [ ] 0
0
= + +
= + +
A p y BB p x AB p
A p y AB p x AA p
l S l S l
l S l S l
6.112
Cele dou ecuaii de mai sus vor fi folosite pentru determinarea componentelor de deplasare a
staiei S n poziia actual S.
Din punct de vedere al evalurii preciziei se calculeaz erorile medii ptratice ale deplasrilor
cu relaiile:
xx
comp
x
Q m =
0
yy
comp
y
Q m =
0
6.113
n practic, oricare din direciile iniiale ale staiei S va fi caracterizat prin eroarea medie
ptratic calculat nainte de compensare, iar oricare din direciile actuale prin eroarea medie dup
procesul de compensare.
Astfel, n procesul unei anumite comparri a rezultatelor ntre msurtoarea iniial i cea
actual, vom avea:
.
2
2
0
const
m
p
l
l
= =
6.114
i: [ ] [ ] [ ] ( ) l y b x a
r
dz
S S S
+ =
1
, 6.115
n care:
r reprezint numrul direciilor observate de dou ori din staia S.
Pentru c variaia direciilor msurate induce mrimea deplasrilor orizontale ale punctelor de
observaie, msurarea direciilor trebuie s se fac cu cel puin trei serii, pentru asigurarea unei precizii
ridicate a determinrilor i ulterior o valoarea ct mai mic a erorii medii ptratice. n timpul msurrii
direciilor se vor lua msuri privind protejarea instrumentului de aciunea razelor solare, care pot
induce erori de msurare mai mari dect valoarea deplasrii nsi. Prin compararea celor trei tururi de
orizont realizate se va decide, n funcie de valorile nenchiderilor dac, suplimentar este necesar
executarea unei noi serii cu o origine diferit.
6.3 METODA ALINIAMENTELOR I UTILITATEA ACESTEIA
N STUDIUL DEPLASRILOR ORIZONTALE
La determinarea deplasrilor orizontale ale construciilor care n plan au configuraie liniar
dreapt (baraje de greutate, poduri, viaducte, ci ferate) se aplic pe scar larg metoda aliniamentelor.
Metoda aliniamentelor presupune determinarea poziiei planimetrice a unui ir de puncte de
control dispuse pe un aliniament, a cror abateri de la linia ce unete punctele de capt s nu fie mai
mici de 34 cm.
n acest scop n afara punctelor materializate pe construcia ce urmeaz a fi observat, se
fixeaz punctele de baz ale aliniamentului n locuri stabile i n afara zonei de influen a construciei.
n planul vertical al aliniamentului, n punctele caracteristice ale construciei, se fixeaz punctele de
control. n aceste puncte se amplaseaz semnale sau mrci de vizare prin observarea crora se
determin valorile abaterilor fa de aliniamente.
Metoda aliniamentului este simpl, precis i necesit un volum redus de lucrri de teren i de
birou, aceasta permind repetarea ei la intervale scurte de timp. Deplasarea orizontal a unui punct de
control, ntre dou cicluri de observaii va rezulta din diferena abaterilor punctului fa de aliniament,
msurate n ciclul final i n ciclul iniial (deplasri totale) sau ntre ciclul actual i ciclul iniial
(deplasri pariale).
Metodele optice de observare a aliniamentului sunt cele mai complete pentru lucrrile de cercetare.
Ele folosesc teodolite sau aliniametre, la care partea principal este luneta cu putere de mrire de 4050 X,
i semnale sau mrci de vizare, fixe sau mobile.
Cnd condiiile terenului nu permit amplasarea punctelor de baz ale aliniamentului n terenuri
nedeformabile, acestea se pot amplasa i n terenuri deformabile, pe construcie sau n interiorul
construciei. n aceste cazuri, metoda aliniamentului se combin cu metoda microtriangulaiei, iar la
determinarea abaterilor fiecrui punct de control fa de aliniament i implicit a deplasrilor, se va ine
seama i de deplasarea punctelor de baz ale aliniamentului.
Determinarea deplasrilor orizontale ale punctelor de control, de fapt a abaterilor fa de
aliniament, se face prin observarea unui singur aliniament pe toata lungimea lui, prin msurarea
unghiurilor paralactice, prin observarea aliniamentelor paralele suplimentare sau prin observarea
aliniamentelor intersectate.
Indiferent de situaie, determinarea abaterilor punctelor de control, de pe construcia studiat,
fa de aliniament se poate executa prin metoda mrcii mobile, metoda msurrii unghiurilor
paralactice sau prin metoda msurrii unghiurilor apropiate de 200
g
.
6.3.1 Metoda observrii unui aliniament pe toat lungimea lui
Se aplic n cazurile n care distana dintre punctele de capt ale aliniamentului este relativ
mic (300500 m), asigurndu-se condiii bune de vizare att ntre punctele de capt ct i ntre
acestea i punctele de control materializate pe construcie. Determinarea abaterilor punctelor de
control, se poate face prin metoda mrcilor mobile, metoda msurrii unghiurilor paralactice, metoda
msurrii unghiurilor apropiate de 200
g
, metoda msurrii pe rigle gradate.
Punctele de capt ale aliniamentului, A i B (figura 6.28), reprezint i puncte de staie din
care se execut msurtorile. Ele sunt materializate prin pilatri de beton armat ca i n cazul metodei
microtriangulaiei.
A D B C
1 2 3 4 n
l
1
l
2
l
3
l
n
Fig. 6.28 Principiul metodei aliniamentului
Semnalizarea capetelor aliniamentului se face cu semnale fixe, fie cu semnale cu marc
mobil n funcie de metoda de lucru.
Fig. 6.29 Tipuri de semnale pentru semnalizarea aliniamentelor
n punctele de control c
i
se aeaz semnale cu marc mobil care sunt dotate cu urub
micrometric ce permite aducerea mrcii mobile pe direcia aliniamentului.
La nceputul fiecrui ciclu de msurtori, operatorul ndreapt axa de vizare a lunetei de-a
lungul aliniamentului B-C (figura 6.28). Msurtorile realizate n cele dou poziii ale lunetei
formeaz o serie de observaii. ntr-un ciclu de msurtori se efectueaz cel puin trei serii n care
teodolitul a fost plasat att n staia B ct i n staia C. La fiecare serie se calculeaz media valorilor
msurate n cele dou poziii.
Abaterea a
1
a unei mrci de vizare, obinut din msurtorile din staia B i abaterea a
2
a
aceleai mrci obinut din msurtorile executate din staia C sunt:
0 2
0 1
m m a
m m a
m
m
=
=
6.116
n care:
m
0
este poziia de zero a mrcii de vizare mobil adic citirea medie pe rigl pentru poziia de
coinciden dintre axa intei de vizare i axa de rotaie a mrcii.
Determinarea lui m
0
se face cu teodolitul nainte de msurtoare aeznd marca la circa 10 m
de teodolit.
Efectund n serii n staia B i n serii n staia C i fcnd urmtoarele notaii
[ ]
n
a a a a
1
' '
1
'
1 1
... + + + =
i
[ ]
n
a a a a
2
' '
2
'
2 2
... + + + =
, rezult abaterea medie din n serii pentru aceeai
marc:
[ ]
n
a
a
statiaB
1
=
i
[ ]
n
a
a
statiaC
2
=
6.117
Abaterea total a mrcii 1, de exemplu, ntr-un ciclu de msurtori se obine astfel:
L
l b
a a
statiaB tot
1
1 .
+ =
sau
( )
L
l L b
a a
statiaC tot
1
1 .
+ =
6.118
n care:
( )
statiaC statiaB
a a b =
l
1
distana orizontal C-1
L lungimea total a aliniamentului B-C
n calculul abaterilor totale diferena b se repartizeaz proporional cu distanele de la punctul
de staie B respectiv C pn la punctul observat de pe construcie.
Deplasarea orizontal
a unei mrci fixat pe un punct al construciei se obine cu ajutorul
abaterilor a fa de aliniament, i se msoar n dou cicluri de observaii, astfel:
( ) ( ) 0 tot i tot
a a =
6.119
n care:
( ) i tot
a
- abaterea unei mrci ntr-un ciclu oarecare i;
( ) 0 tot
a
- abaterea aceleiai mrci de tasare n ciclul iniial sau de referin.
La fiecare ciclu de observaii se verific poziia punctelor de sprijin B i C fa de aliniamentul
A-D, toate punctele trebuind s fie coliniare. n acest scop instrumentul se instaleaz n punctul A,
marca cu discul fix n punctul D, iar marca cu discul mobil, succesiv n punctele B i C. Concordana
ntre citirile pe scara mrcii mobile (n limitele erorilor de msurare) va constitui o dovad a stabilitii
punctelor B i C fa de aliniamentul A-D.
Precizia rezultatelor msurtorilor, a deplasrilor orizontale, efectuate prin acest procedeu se
face cu ajutorul urmtoarelor relaii de evaluare.
1. Eroarea medie ptratic de determinare a abaterii fiecrei mrci fa de aliniament ntr-o
serie:
[ ]
1
=
r
vv
m
6.120
n care: vv abaterea mediei aritmetice;
r numrul de citiri ntr-o serie.
2. Eroarea medie ptratic a mediei abaterilor din n serii:
n
m
M =
6.121
3. Eroarea medie ptratic a mediei abaterilor obinute din staia B i staia C:
2 2
statiaC statiaB
statiaC statiaB
tot
M M
M M
M
+
=
6.122
4. Eroarea medie ptratic de determinare a deplasrii de la aliniamentul comun, obinut ca
diferen a abaterilor n dou cicluri de msurtori:
( ) ( )
2
2
2
1 tot tot
M M + =
6.123
n concluzie, asupra preciziei observaiilor efectuate prin metoda aliniamentului, influeneaz
n mod special eroarea de vizare i condiiile exterioare de genul refraciei atmosferice.
6.3.2 Metoda observrii unghiurilor paralactice
Particularizarea metodei aliniamentelor prin procedeul msurrii unghiurilor paralactice, const, ca i
n cazul vizrii aliniamentului pe ntreaga sa lungime, n stabilitatea unui aliniament ct mai apropiat de linia
care unete punctele construciei observate.
Punctele de sprijin ale aliniamentului considerat A i B servesc ca i puncte de staie pentru
teodolit. n punctele observate, coliniare aliniamentului, se ncastreaz buce metalice n care se vor
instala n timpul msurtorilor mrci de vizare stabile sau reperi simpli metalici, care urmeaz a fi
vizai pentru msurarea unghiurilor orizontale.
Msurarea unghiurilor orizontale corespunztor abaterilor a
i
ale punctelor observate (1,2, , n) se
execut cu un teodolit de precizie ridicat, aezat n staie n punctul A cu care se msoar fa de
aliniamentul A-B unghiurile
i
i n mod analog, din staia B se msoar fa de acelai aliniament
unghiurile
i
, msurtorile de unghiuri executndu-se n ambele poziii ale lunetei teodolitului (figura
6.30).
S
1 2
1 2 3 4
1'
1''
a'
1
a''
1
'
1
''
1
'
1
''
1
1
l L-l
1
L
S
Fig. 6.30 Metoda aliniamentului msurarea unghiurilor paralactice
La fiecare serie se calculeaz media valorilor msurate
i
, respectiv
i
pentru fiecare reper
observat.
Mrimea abaterii
'
1
a
corespunztoare deplasrii unui punct al construciei din poziia 1 n
poziia 1 n ipoteza coliniaritii punctelor A 1 B va fi dat de relaia:
( )
( )
( )
cc
cc
mediu
cc
cc
mediu
l L l a
'
1
1
'
1
1
'
1
= =
6.124
Cele dou valori ale abaterii obinute cu ajutorul unghiurilor
i
i
i
servesc la determinarea
abaterii punctului observat care se accept ca o medie aritmetic a acestora.
n cazul cnd poziia iniial a punctului observat nu este coliniar cu punctele A i B care
caracterizeaz aliniamentul de lucru, se face o determinare a acestei poziii iniiale, n mod analog cu o
poziie deviat, calculndu-se abaterea iniial a
i
fa de aliniament.
Deplasarea punctului fa de poziia sa iniial se va obine n acest caz ca o diferen ntre cele
dou abateri dintre ciclul actual i ciclul de referin sau ciclul iniial.
0
1
'
1 1
0
1
a a
a a
i
=
=
6.125
n care:
'
1
a
- deplasarea punctului observat din poziia 1 n poziia 1;
0
1
a
- abaterea punctului 1 fa de aliniamentul A-B.
Procedeul aliniamentului prin msurarea unghiurilor orizontale de abatere a poziiei deplasate
ale punctelor, permite o determinare simpl a mrimilor deplasrilor dar necesit o precizie ridicat la
msurarea unghiurilor de abatere
i
i
i
, valorile unghiulare fiind nregistrate cu precizia de 0,5
cc
1
cc
.
Aprecierea preciziei msurtorilor se face corespunztor conceptelor teoretice prin calculul
parametrilor specifici:
1. Eroarea medie ptratic a valorii medii a unghiului
i
sau
i
din n serii:
( )
[ ]
( ) 1
,
=
n n
vv
m
6.126
n care:
vv eroarea rezidual rezultat din diferena dintre valoarea unghiului
i
sau
i
dintr-o serie
fa de media unghiului obinut din n serii;
2. Eroarea medie ptratic de determinare a abaterilor mrcilor de pe construcie:
( )
cc
cc
a
l m
m
=
,
6.127
3. Eroarea medie ptratic de determinare a deplasrii fa de aliniament, aflat ca diferena
dintre abaterile a
1
i a
2
din dou cicluri de msurtori:
2 2
2 1
a a
m m + =
6.128
Acest procedeu are fa de cel de vizare n lungul aliniamentului urmtoarele avantaje:-
dispare necesitatea folosirii mrcii mobile i ca urmare nu mai este necesar utilizarea unui operator;-
apare posibilitatea efecturii observaiilor asupra unor construcii care au contururi diferite de forma
rectilinie, cum ar fi barajele arcuite, viaducte arcuite.
S-ar putea să vă placă și
- Detaşări Şi Parcelări de Suprafeţe: CapitolulDocument28 paginiDetaşări Şi Parcelări de Suprafeţe: CapitolulMadalina AndreeaÎncă nu există evaluări
- Intersectie Unghiulara InapoiDocument4 paginiIntersectie Unghiulara InapoiRenato MazeraÎncă nu există evaluări
- Curs Topo 30 AprilieDocument20 paginiCurs Topo 30 AprilieLucianÎncă nu există evaluări
- Curs - Topografie Inginereasca PDFDocument71 paginiCurs - Topografie Inginereasca PDFAlina-Alexandra Ion100% (1)
- TopografieDocument368 paginiTopografienicollette_crzÎncă nu există evaluări
- Drumuire TahimetricaDocument42 paginiDrumuire TahimetricaMadalina ElenaÎncă nu există evaluări
- 4.consideratii GeneraleDocument6 pagini4.consideratii GeneraleAndreea ParusÎncă nu există evaluări
- Topografie InginereascaDocument24 paginiTopografie Inginereascaflorinursu1Încă nu există evaluări
- Subiecte Topografie LicentaDocument211 paginiSubiecte Topografie LicentaadysnakeÎncă nu există evaluări
- Intocmirea Planurilor Si HartilorDocument24 paginiIntocmirea Planurilor Si HartilorChiriac Ionut AlinÎncă nu există evaluări
- Curs Coordonate + Clasificare PDFDocument39 paginiCurs Coordonate + Clasificare PDFAndreea TimisÎncă nu există evaluări
- Topografia in Constructii CivileDocument118 paginiTopografia in Constructii CivileStefan DumitruÎncă nu există evaluări
- Drumuirea PlanimetricăDocument3 paginiDrumuirea Planimetricăeremia scutelnicÎncă nu există evaluări
- Topo2 2010Document116 paginiTopo2 2010Roxana Nistor100% (1)
- Ridicari Topografice Speciale - Exercitii 2017Document54 paginiRidicari Topografice Speciale - Exercitii 2017Lupascu DanielÎncă nu există evaluări
- Topografie Generala Culegere de Probleme PDFDocument89 paginiTopografie Generala Culegere de Probleme PDFgabriela gabitzaÎncă nu există evaluări
- Radulescu A.T., S.a., Topografie Inginereasca. Indrumator de Lucrari (1) CLUJ 2018 PDFDocument199 paginiRadulescu A.T., S.a., Topografie Inginereasca. Indrumator de Lucrari (1) CLUJ 2018 PDFTătăruș Liviu AlinÎncă nu există evaluări
- Măsurarea Direcțiilor Azimutale Prin Metoda Seriilor CompleteDocument6 paginiMăsurarea Direcțiilor Azimutale Prin Metoda Seriilor CompleteMihail MahuÎncă nu există evaluări
- Cladiri InalteDocument38 paginiCladiri InalteClaudia SideiÎncă nu există evaluări
- Suport de Curs Monitorizarea Deformarii Constructiilor ANUL 3 SEM 2Document59 paginiSuport de Curs Monitorizarea Deformarii Constructiilor ANUL 3 SEM 2oana_petcu_2Încă nu există evaluări
- MTC - Examen de LicenţăDocument5 paginiMTC - Examen de LicenţăMihai Gal0% (1)
- Parametrii Elipsoidului de RotatieDocument4 paginiParametrii Elipsoidului de RotatieefimÎncă nu există evaluări
- Aparate Şi Metode de Măsurare Utilizate În Reţelele Geodezice de ÎndesireDocument68 paginiAparate Şi Metode de Măsurare Utilizate În Reţelele Geodezice de ÎndesireAnonymous ets4ErvÎncă nu există evaluări
- Lucrare 1 - Pucheanu Alin-Marian, GR 2, An III, CCLADocument16 paginiLucrare 1 - Pucheanu Alin-Marian, GR 2, An III, CCLAalan alan12Încă nu există evaluări
- Retele Geodezice Si Metode de MasurareDocument6 paginiRetele Geodezice Si Metode de MasurareAlexandra Cerasela IordacheÎncă nu există evaluări
- Calculul Si Detasarea SuprafetelorDocument7 paginiCalculul Si Detasarea SuprafetelorsukyyyÎncă nu există evaluări
- Cursuri Geodezie A 2 An III Sem.IDocument143 paginiCursuri Geodezie A 2 An III Sem.IVasilescu Ciprian100% (1)
- Curs MonitorizareDocument12 paginiCurs MonitorizareSilviuÎncă nu există evaluări
- TopografieDocument6 paginiTopografieDaniela IoanaÎncă nu există evaluări
- IoanaDocument7 paginiIoanaAndra DanielÎncă nu există evaluări
- Calcule Topografice in CadastruDocument27 paginiCalcule Topografice in CadastruAlexinNo JblÎncă nu există evaluări
- Lucrare de An - Topografie Inginereasca IIDocument30 paginiLucrare de An - Topografie Inginereasca IIЛёш-КаÎncă nu există evaluări
- Proiect Cai de Comunicatii TeoriaDocument9 paginiProiect Cai de Comunicatii TeoriaFlorina GeorgianaÎncă nu există evaluări
- Calculul Suprafetelor in Lucrarile de CadastruDocument12 paginiCalculul Suprafetelor in Lucrarile de Cadastruoctav_laluÎncă nu există evaluări
- Cap 3Document34 paginiCap 3Maxim MirceaÎncă nu există evaluări
- Subiecte Licenta 2018 - TOPOGRAFIE - RO - IntrebariDocument3 paginiSubiecte Licenta 2018 - TOPOGRAFIE - RO - IntrebariTudor-Vlad MateiÎncă nu există evaluări
- Indicatii Metodice Pentru Efect Pract Topografice DSDocument72 paginiIndicatii Metodice Pentru Efect Pract Topografice DSNetid MihaiÎncă nu există evaluări
- TopografieDocument20 paginiTopografieauricaclaudiaÎncă nu există evaluări
- Intrebari Topografie - Geodezie Examen de StatDocument7 paginiIntrebari Topografie - Geodezie Examen de StatDenis CalalbÎncă nu există evaluări
- Curs Topografie GeneralaDocument163 paginiCurs Topografie GeneralaEnea Edera100% (1)
- NOTE-de-CURS MDC 2017Document107 paginiNOTE-de-CURS MDC 2017Gigel Adrian CaldareaÎncă nu există evaluări
- Trasarea Pe Teren A Cotelor in Groapa de FundatieDocument2 paginiTrasarea Pe Teren A Cotelor in Groapa de FundatieWeber EduardÎncă nu există evaluări
- Metoda Celor Mai Mici PatrateDocument8 paginiMetoda Celor Mai Mici PatrateCatalina MateiÎncă nu există evaluări
- Curs 6-14Document74 paginiCurs 6-14ValyValiusaÎncă nu există evaluări
- Aplicatie Practica 2bisDocument14 paginiAplicatie Practica 2bisAdriana ȘendroniÎncă nu există evaluări
- Metode de TrasareDocument29 paginiMetode de TrasareDaniela Buzatu50% (2)
- Geode ZieDocument34 paginiGeode ZieToader CristianÎncă nu există evaluări
- TopografieDocument28 paginiTopografieSilviuMcsÎncă nu există evaluări
- Metoda Intersectiei Unghiulare InainteDocument4 paginiMetoda Intersectiei Unghiulare InainteAndrei YanissÎncă nu există evaluări
- Lucrări La Trasarea Axelor Căilor de Comunicaţii TerestreDocument5 paginiLucrări La Trasarea Axelor Căilor de Comunicaţii TerestreDaniel GrigoreÎncă nu există evaluări
- Drumuire InchisaDocument9 paginiDrumuire InchisaMihaela Precup100% (1)
- Trasare Curbe DrumDocument6 paginiTrasare Curbe DrumcitizenkanegÎncă nu există evaluări
- Metoda Coordonatelor PolareDocument7 paginiMetoda Coordonatelor PolareAndrei YanissÎncă nu există evaluări
- Aplicatii in ConstructiiDocument37 paginiAplicatii in ConstructiiSamantha WilkersonÎncă nu există evaluări
- Intrebari LicentaDocument6 paginiIntrebari LicentaStef IoanÎncă nu există evaluări
- Topografie CursDocument15 paginiTopografie CursFlorina GeorgianaÎncă nu există evaluări
- ALTIMETRIEDocument5 paginiALTIMETRIECarnaru AdrianÎncă nu există evaluări
- Ridicari TotpoDocument4 paginiRidicari TotpoGică BădăluțăÎncă nu există evaluări
- Metoda Coordonatelor RectangulareDocument4 paginiMetoda Coordonatelor RectangulareFlorina GeorgianaÎncă nu există evaluări