S-ar putea să vă placă și
- Lista Furnizori Aprobati PTR Cursuri CAADocument14 paginiLista Furnizori Aprobati PTR Cursuri CAASalam AlecuÎncă nu există evaluări
- Mijl Colective de SalvareDocument5 paginiMijl Colective de SalvareAndreea MihaelaÎncă nu există evaluări
- Formular Ortodroma FinalDocument3 paginiFormular Ortodroma FinalSalam AlecuÎncă nu există evaluări
- MNC Rezolvari 1 29Document19 paginiMNC Rezolvari 1 29Salam AlecuÎncă nu există evaluări
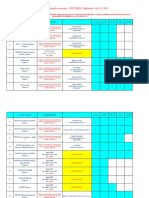
- Programarea Săptămânală A Cursurilor. CONSTANŢA. Săptămâna 08 12.11.2021Document5 paginiProgramarea Săptămânală A Cursurilor. CONSTANŢA. Săptămâna 08 12.11.2021Salam AlecuÎncă nu există evaluări
- ANUNT Acces Personal Navigant Pe Baza de Programare OnlineDocument1 paginăANUNT Acces Personal Navigant Pe Baza de Programare OnlineSalam AlecuÎncă nu există evaluări
- Fotrmular Ortodroma CulegereDocument4 paginiFotrmular Ortodroma CulegereSalam AlecuÎncă nu există evaluări
- Calculul Stabilitatii La Unghiuri Mari de I Nclinare KrilovDocument10 paginiCalculul Stabilitatii La Unghiuri Mari de I Nclinare KrilovGabriela PrimaruÎncă nu există evaluări
- ILEDocument23 paginiILESalam AlecuÎncă nu există evaluări
- Pecn Situatii DeosebiteDocument3 paginiPecn Situatii DeosebiteSalam AlecuÎncă nu există evaluări
- Proiect Carene DrepteDocument19 paginiProiect Carene DrepteMitu Eduard100% (1)
- Prezentare AIS Si VDR-romana COMPLETATDocument46 paginiPrezentare AIS Si VDR-romana COMPLETATSalam AlecuÎncă nu există evaluări
- Metode de Calcul A ElicelorDocument16 paginiMetode de Calcul A ElicelorAdelina Velea100% (1)
- MNC2 4 Manevra Cu AvariiDocument37 paginiMNC2 4 Manevra Cu AvariiSalam AlecuÎncă nu există evaluări
- LEGISLATIE ORDONANTA Privind Transportul NavalDocument31 paginiLEGISLATIE ORDONANTA Privind Transportul NavalSalam AlecuÎncă nu există evaluări
- Subiecte Examen NONR 1Document10 paginiSubiecte Examen NONR 1Salam AlecuÎncă nu există evaluări
- MNC1 4 Efct Combinat C e Nave Cu 1 EliceDocument7 paginiMNC1 4 Efct Combinat C e Nave Cu 1 EliceSalam AlecuÎncă nu există evaluări
- TematicaNTMF 2016Document8 paginiTematicaNTMF 2016Salam AlecuÎncă nu există evaluări
- Dmi IntrebariDocument6 paginiDmi IntrebariSalam AlecuÎncă nu există evaluări
- MNC1 9 Acostare Legare PlecareDocument32 paginiMNC1 9 Acostare Legare PlecareSalam AlecuÎncă nu există evaluări
- 00.subiecte Colocviu CMDocument1 pagină00.subiecte Colocviu CMSalam AlecuÎncă nu există evaluări
- Port State ControlDocument17 paginiPort State ControlSalam AlecuÎncă nu există evaluări
- Tematica Examen Drept MaritimDocument1 paginăTematica Examen Drept MaritimSalam AlecuÎncă nu există evaluări
- Drept Maritim International (Dmi)Document306 paginiDrept Maritim International (Dmi)florilinaÎncă nu există evaluări
- 06 - Sisteme de Reglare Automata IDocument74 pagini06 - Sisteme de Reglare Automata Ienache nicolae100% (1)
- Cap.1 Curs 2 Calculul Cantitatii de Marfa Prin Metoda PescajelorDocument22 paginiCap.1 Curs 2 Calculul Cantitatii de Marfa Prin Metoda PescajelorSalam Alecu67% (3)
- ESN 1 GrileDocument31 paginiESN 1 GrilePesu Catalin100% (1)
- Prezentare AIS Si VDR-romana COMPLETATDocument46 paginiPrezentare AIS Si VDR-romana COMPLETATSalam AlecuÎncă nu există evaluări
- 06 TCVNDocument18 pagini06 TCVNSalam AlecuÎncă nu există evaluări